
ESTIMATION PROCESS FOR TIRE-ROAD FORCES AND VEHICLE
SIDESLIP ANGLE
Guillaume Baffet, Ali Charara
Heudiasyc Laboratory (UMR CNRS 6599), Universit
´
e de Technologie de Compi
`
egne
Centre de recherche Royallieu, BP20529 - 60205 Compi
`
egne, France
Daniel Lechner
INRETS-MA Laboratory (Department of Accident Mechanism Analysis)
Chemin de la Croix Blanche, 13300 Salon de Provence, France
Keywords:
State observers, vehicle dynamic, sideslip angle estimation, tire-force estimation, wheel cornering stiffness
estimation, linear adaptive force model.
Abstract:
This study focuses on the estimation of car dynamic variables for the improvement of vehicle safety, handling
characteristics and comfort. More specifically, a new estimation process is proposed to estimate longitudi-
nal/lateral tire-road forces, sideslip angle and wheel cornering stiffness. This method uses measurements from
currently-available standard sensors (yaw rate, longitudinal/lateral accelerations, steering angle and angular
wheel velocities). The estimation process is separated into two blocks: the first block contains an observer
whose principal role is to calculate tire-road forces without a descriptive force model, while in the second block
an observer estimates sideslip angle and cornering stiffness with an adaptive tire-force model. The different
observers are based on an Extended Kalman Filter (EKF). The estimation process is applied and compared to
real experimental data, notably sideslip angle and wheel force measurements. Experimental results show the
accuracy and potential of the estimation process.
1 INTRODUCTION
The last few years have seen the emergence in cars
of active security systems to reduce dangerous situ-
ations for drivers. Among these active security sys-
tems, Anti-lock Braking Systems (ABS) and Elec-
tronic Stability Programs (ESP) significantly reduce
the number of road accidents. However, these sys-
tems may improved if the dynamic potential of a car
is well known. For example, information on tire-road
friction means a better definition of potential trajec-
tories, and therefore a better management of vehicle
controls. Nowadays, certain fundamental data relat-
ing to vehicle-dynamics are not measurable in a stan-
dard car for both technical and economic reasons. As
a consequence, dynamic variables such as tire forces
and sideslip angle must be observed or estimated.
Vehicle-dynamic estimation has been widely dis-
cussed in the literature, e.g. ((Kiencke and Nielsen,
2000), (Ungoren et al., 2004), (Lechner, 2002),
(Stephant et al., 2006)). The vehicle-road system is
usually modeled by combining a vehicle model with
a tire-force model in one block. One particularity
of this study is to separate the estimation modeling
into two blocks (shown in figure 1), where the first
block concerns the car body dynamic while the sec-
ond is devoted to the tire-road interface dynamic. The
Measurements: yaw rate, steering angle, lateral acceleration
longitudinal acceleration, angular wheel velocities
Extended Kalman Filter
Four-wheel vehicle model
Random walk force model
Extended Kalman Filter
Side-slip angle model
Linear adaptive force model
Longitudinal and lateral tire forces, yaw rate
Block 1
Block 2
Estimations : Longitudinal and lateral forces, sideslip angle,
yaw rate, cornering stiffness
Observer O1,4w :
Observer O2,LM :
Figure 1: Estimation process. Observers O
1,4w
and O
2,LAM
.
first block contains an Extended Kalman Filter (de-
noted as O
1,4w
) constructed with a four-wheel vehicle
5
Baffet G., Charara A. and Lechner D. (2007).
ESTIMATION PROCESS FOR TIRE-ROAD FORCES AND VEHICLE SIDESLIP ANGLE.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 5-10
DOI: 10.5220/0001623900050010
Copyright
c
SciTePress

model and a random walk force model. The first ob-
server O
1,4w
estimates longitudinal/lateral tire forces
and yaw rate, which are inputs to the observer in the
second block (denoted as O
2,LAM
). This second ob-
server is developed from a sideslip angle model and a
linear adaptive force model.
Some studies have described observers which take
road friction variations into account ((Lakehal-ayat
et al., 2006), (Rabhi et al., 2005), (Ray, 1997)). In
the works of (Lakehal-ayat et al., 2006) road fric-
tion is considered as a disturbance. Alternatively, as
in (Rabhi et al., 2005), the tire-force parameters are
identified with an observer, while in (Ray, 1997) tire
forces are modeled with an integrated random walk
model. In this study a linear adaptive tire force model
is proposed (in block 2) with an eye to studying road
friction variations.
The rest of the paper is organized as follows. The
second section describes the vehicle model and the
observer O
1,4w
(block 1). Next, the third section
presents the sideslip angle and cornering stiffness ob-
server (O
2,LAM
in block 2). In the fourth section an
observability analysis is performed. The fifth section
provides experimental results: the two observers are
evaluated with respect to sideslip angle and tire force
measurements. Finally, concluding remarks are given
in section 6.
2 BLOCK 1: OBSERVER FOR
TIRE-ROAD FORCE
This section describes the first observer O
1,4w
con-
structed from a four-wheel vehicle model (figure 2),
where
˙
ψ is the yaw rate, β the center of gravity
ψ
Vg
β
E
L2
L1
Fy21
Fx21
Fy22
Fx22
Fy12
δ2
Fx12
Fy11
δ1
Fx11
Fy11
x
y
Figure 2: Four-wheel vehicle model.
sideslip angle,V
g
the center of gravity velocity, and L
1
and L
2
the distance from the vehicle center of gravity
to the front and rear axles respectively. F
x,y,i, j
are the
longitudinal and lateral tire-road forces, δ
1,2
are the
front left and right steering angles respectively, and
E is the vehicle track (lateral distance from wheel to
wheel).
In order to develop an observable system (notably
in the case of null steering angles), rear longitudinal
forces are neglected relative to the front longitudinal
forces. The simplified equation for yaw acceleration
(four-wheel vehicle model) can be formulated as the
following dynamic relationship (O
1,4w
model):
¨
ψ =
1
I
z
L
1
[F
y11
cos(δ
1
) + F
y12
cos(δ
2
)
+F
x11
sin(δ
1
) + F
x12
sin(δ
2
)]
−L
2
[F
y21
+ F
y22
]
+
E
2
[F
y11
sin(δ
1
) − F
y12
sin(δ
2
)
+F
x12
cos(δ
2
) − F
x11
cos(δ
1
)]
, (1)
where m the vehicle mass and I
z
the yaw moment of
inertia. The different force evolutions are modeled
with a random walk model:
[
˙
F
xij
,
˙
F
yij
] = [0,0], i = 1, 2 j = 1, 2. (2)
The measurement vector Y and the measurement
model are:
Y = [
˙
ψ,γ
y
,γ
x
] = [Y
1
,Y
2
,Y
3
],
Y
1
=
˙
ψ,
Y
2
=
1
m
[F
y11
cos(δ
1
) + F
y12
cos(δ
2
)
+(F
y21
+ F
y22
) + F
x11
sin(δ
1
) + F
x12
sin(δ
2
)],
Y
3
=
1
m
[−F
y11
sin(δ
1
) − F
y12
sin(δ
2
)
+F
x11
cos(δ
1
) + F
x12
cos(δ
2
)],
(3)
where γ
x
and γ
y
are the longitudinal and lateral accel-
erations respectively.
The O
1,4w
system (association between equations (1),
random walk force equation (2), and the measurement
equations (3)) is not observable in the case where
F
y21
and F
y22
are state vector components. For ex-
ample, in equation (1, 2, 3) there is no relation al-
lowing to distinguish the rear lateral forces F
y21
and
F
y22
in the sum (F
y21
+F
y22
): as a consequence only
the sum (F
y2
= F
y21
+ F
y22
) is observable. Moreover,
when driving in a straight line, yaw rate is small, δ
1
and δ
2
are approximately null, and hence there is no
significant knowledge in equation (1, 2, 3) differenti-
ating F
y11
and F
y12
in the sum (F
y11
+ F
y12
), so only
the sum (F
y1
= F
y11
+ F
y12
) is observable. These ob-
servations lead us to develop the O
1,4w
system with a
state vector composed of force sums:
X = [
˙
ψ,F
y1
,F
y2
,F
x1
], (4)
where F
x1
is the sum of front longitudinal forces
(F
x1
= F
x11
+F
x12
). Tire forces and force sums are as-
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
6

sociated according to the dispersion of vertical forces:
F
x11
=
F
z11
F
x1
F
z12
+ F
z11
, F
x12
=
F
z12
F
x1
F
z12
+ F
z11
, (5)
F
y11
=
F
z11
F
y1
F
z12
+ F
z11
, F
y12
=
F
z12
F
y1
F
z12
+ F
z11
, (6)
F
y21
=
F
z21
F
y2
F
z22
+ F
z21
, F
y22
=
F
z22
F
y2
F
z22
+ F
z21
, (7)
where F
zij
are the vertical forces. These are calcu-
lated, neglecting roll and suspension movements, with
the following load transfer model:
F
z11
=
L
2
mg− h
cog
mγ
x
2(L
1
+ L
2
)
−
L
2
h
cog
mγ
y
(L
1
+ L
2
)E
, (8)
F
z12
=
L
2
mg− h
cog
mγ
x
2(L
1
+ L
2
)
+
L
2
h
cog
mγ
y
(L
1
+ L
2
)E
, (9)
F
z21
=
L
1
mg+ h
cog
mγ
x
2(L
1
+ L
2
)
−
L
2
h
cog
mγ
y
(L
1
+ L
2
)E
, (10)
F
z22
=
L
1
mg+ h
cog
mγ
x
2(L
1
+ L
2
)
+
L
2
h
cog
mγ
y
(L
1
+ L
2
)E
, (11)
h
cog
being the center of gravity height and g the grav-
itational constant. The load transfer model follows
the assumption of the superposition principle of in-
dependent longitudinal and lateral acceleration con-
tributions (Lechner, 2002). The input vectors U of
O
1,4w
observer is:
U = [δ
1
,δ
2
,F
z11
,F
z12
,F
z21
,F
z22
]. (12)
As regards the vertical force inputs, these are calcu-
lated from lateral and longitudinal accelerations with
the load transfer model.
3 BLOCK 2: OBSERVER FOR
SIDESLIP ANGLE AND
CORNERING STIFFNESS
This section presents the observer O
2,LAM
constructed
from a sideslip angle model and a tire-force model.
The sideslip angle model is based on the single-track
model (Segel, 1956), with neglected rear longitudinal
force:
˙
β =
F
x1
sin(δ− β) + F
y1
cos(δ− β) + F
y2
cos(β)
mV
g
−
˙
ψ.
(13)
Rear and front sideslip angles are calculated as:
β
1
= δ − β− L
1
˙
ψ/V
g
,
β
2
= −β + L
2
˙
ψ/V
g
,
(14)
where δ is the mean of front steering angles.
The dynamic of the tire-road contact is usually
formulated by modeling the tire-force as a function of
the slip between tire and road ((Pacejka and Bakker,
1991), (Kiencke and Nielsen, 2000), (Canudas-De-
Wit et al., 2003)). Figure 3 illustrates different lateral
tire-force models (linear, linear adaptive and Burck-
hardt for various road surfaces (Kiencke and Nielsen,
2000)). In this study lateral wheel slips are assumed to
be equal to the wheel sideslip angles. In current driv-
0 2 4 6 8 10 12 14 16
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Front lateral slip, front wheel sideslip angle (°)
Front lateral tire force (kN)
Linear
Linear adaptive
Burckhardt, asphalt dry
Burckhardt, asphalt wet
Burckhardt, cobblestone wet
Burckhardt, ice
C1
C1+∆Ca1
Figure 3: Lateral tire force models: linear, linear adaptive,
Burckhardt for various road surfaces.
ing situations, lateral tire forces may be considered
linear with respect to sideslip angle (linear model):
F
yi
(β
i
) = C
i
β
i
, i = 1, 2, (15)
where C
i
is the wheel cornering stiffness, a parameter
closely related to tire-road friction.
When road friction changes or when the nonlinear
tire domain is reached, ”real” wheel cornering stiff-
ness varies. In order a take the wheel cornering stiff-
ness variations into account, we proposed an adaptive
tire-force model (named the linear adaptive tire-force
model, illustrated in figure 3). This model is based on
the linear model at which a readjustment variable ∆C
ai
is added to correct wheel cornering stiffness errors:
F
yi
(β
i
) = (C
i
+ ∆C
ai
)β
i
. (16)
The variable ∆C
ai
is included in the state vector of the
O
2,LAM
observer and it evolution equation is formu-
lated according to a random walk model (∆
˙
C
ai
= 0).
State X
′
∈R
3
, input U
′
∈R
4
and measurement Y
′
∈R
3
are chosen as:
X
′
= [x
′
1
,x
′
2
,x
′
3
] = [β, ∆C
a1
,∆C
a2
],
U
′
= [u
′
1
,u
′
2
,u
′
3
,u
′
4
] = [δ,
˙
ψ,V
g
,F
x1
],
Y
′
= [y
′
1
,y
′
2
,y
′
3
] = [F
y1
,F
y2
,γ
y
].
(17)
ESTIMATION PROCESS FOR TIRE-ROAD FORCES AND VEHICLE SIDESLIP ANGLE
7
The measurement model is
y
′
1
= (C
1
+ x
′
2
)β
1
,
y
′
2
= (C
2
+ x
′
3
)β
2
,
y
′
3
=
1
m
[(C
1
+ x
′
2
)β
1
cos(u
′
1
) + (C
2
+ x
′
3
)β
2
+ u
′
4
sin(u
′
1
)].
(18)
where
β
1
= u
′
1
− x
′
1
− L
1
u
′
2
/u
′
3
,
β
2
= −x
′
1
+ L
2
u
′
2
/u
′
3
.
(19)
Consider the state estimation denoted as
b
X
′
=
[
b
x
1
′
,
b
x
2
′
,
b
x
3
′
], the state evolution model of O
2,LAM
is:
˙
b
x
1
′
=
1
mu
3
[u
′
4
sin(u
′
1
−
b
x
1
′
) + F
yw1,aux
cos(u
′
1
−
b
x
1
′
)
+ F
yw2,aux
cos(
b
x
1
′
)] − u
′
2
,
˙
b
x
2
′
= 0,
˙
b
x
3
′
= 0,
(20)
where the auxiliary variables F
yw1,aux
and F
yw2,aux
are
calculated as:
F
yw1,aux
= (C
1
+
b
x
2
′
)(u
′
1
−
b
x
1
′
− L
1
u
′
2
/u
′
3
),
F
yw2,aux
= (C
2
+
b
x
3
′
)(−
b
x
1
′
+ L
2
u
′
2
/u
′
3
).
(21)
4 OBSERVABILITY
The different observers (O
1,4w
, O
2,LAM
) were devel-
oped according to an extended Kalman filter method
(Kalman, 1960), (Mohinder and Angus, 1993).
The two observer systems are nonlinear, so the
two observability functions were calculated using
a lie derivative method (Nijmeijer and der Schaft,
1990). Ranks of the two observability functions cor-
responded to the state vector dimensions, so systems
O
1,4w
and O
2,LAM
were locally observable. Concern-
ing the observability of the complete systems (O
1,4w
and O
2,LAM
), a previous work (Baffet et al., 2006a)
showed that a similar system (in one block) is locally
observable.
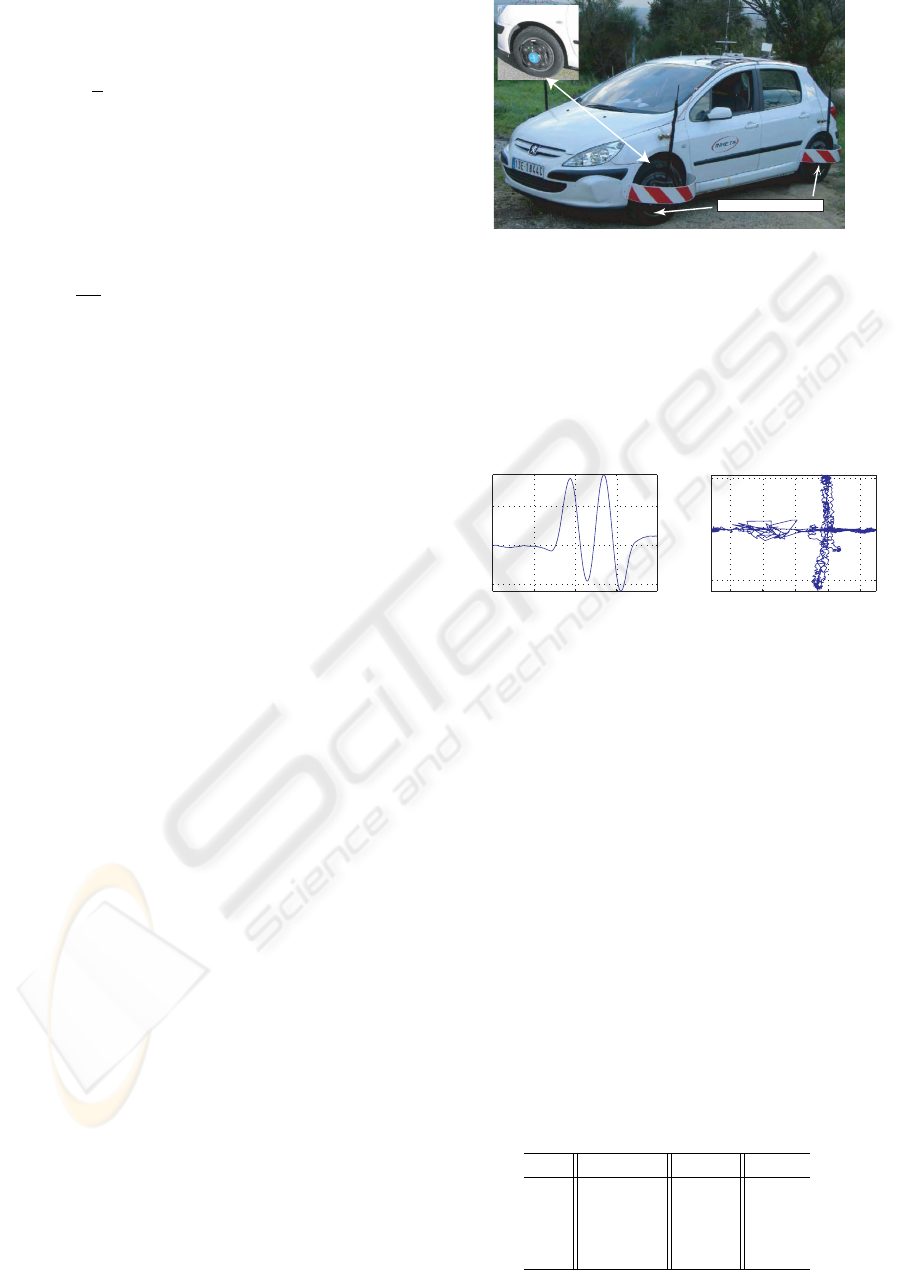
5 EXPERIMENTAL RESULTS
The experimental vehicle (see figure 4) is a Peugeot
307 equipped with a number of sensors including
GPS, accelerometer, odometer, gyrometer, steering
angle, correvit and dynamometric hubs. Among these
sensors, the correvit (a non-contact optical sensor)
gives measurements of rear sideslip angle and vehi-
cle velocity, while the dynamometric hubs are wheel-
force transducers.
This study uses an experimental test representative
of both longitudinal and lateral dynamic behaviors.
Wheel-force transducers
Figure 4: Laboratory’s experimental vehicle.
The vehicle trajectory and the acceleration diagram
are shown in figure 5. During the test, the vehicle first
accelerated up to γ
x
≈ 0.3g, then negotiated a slalom
at an approximate velocity of 12m/s (−0.6g < γ
y
<
0.6g), before finally decelerating to γ
x
≈ −0.7g. The
0 50 100 150
-1
0
1
Longitudinal position (m)
Lateral position (m)
-6 -4 -2 0 2
-5
0
5
Longitudinal acceleration (m/s )
2
acceleration
(m/s )
2
Lateral
Figure 5: Experimental test, vehicle positions, acceleration
diagram.
results are presented in two forms: figures of estima-
tions/measurements and tables of normalized errors.
The normalized error ε
z
for an estimation z is defined
in (Stephant et al., 2006) as
ε
z
= 100(kz− z
measurement
k)/(maxkz
measurement
k).
(22)
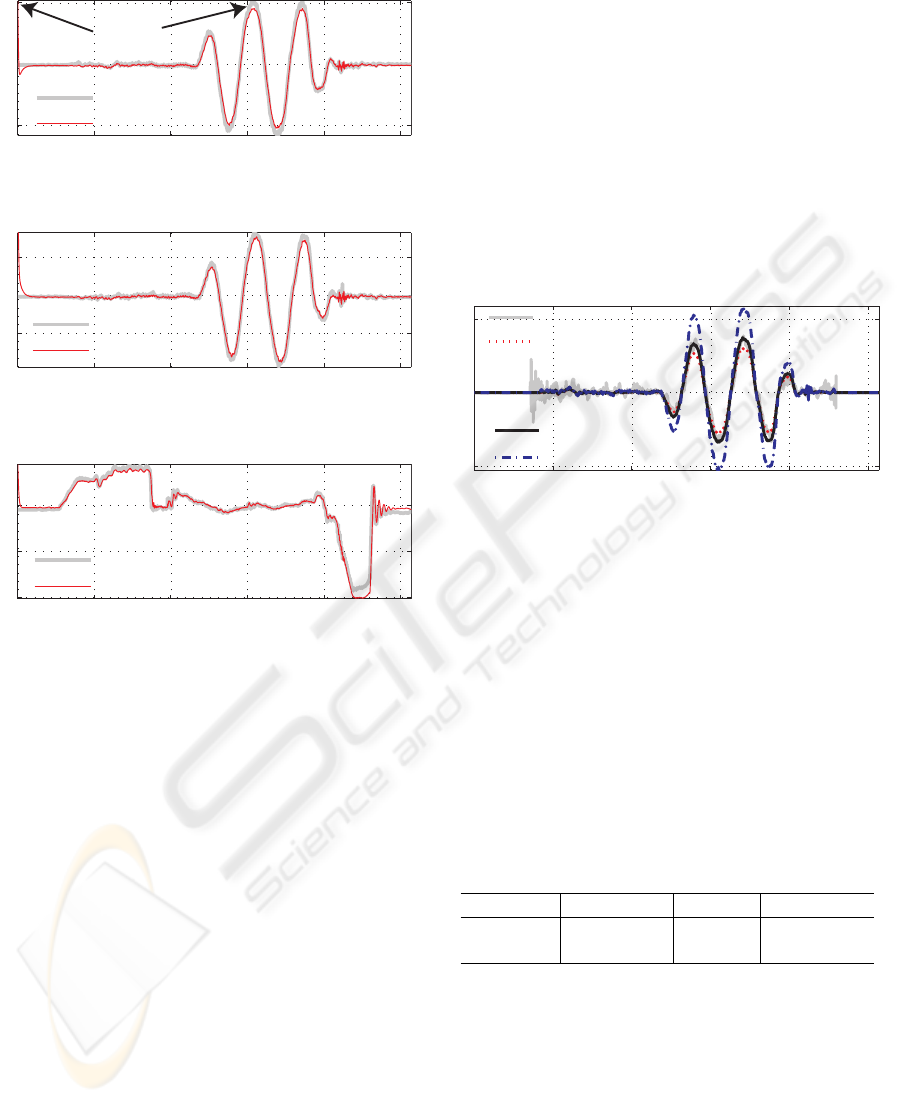
5.1 Block 1: Observer O
1,4w
Results
Figure 6 and table 1 present O
1,4w
observer results.
The state estimations were initialized using the max-
imum value of the measurements during the test (for
instance, the estimation of the front lateral force F
y1
Table 1: Maximum absolute values, O
1,4w
normalized mean
errors and normalized standard deviation (Std).
maxkk Mean Std
F
y1
5816 N 3.1% 4.0%
F
y2
3782 N 2.9% 5.4%
F
x1
9305 N 3.1% 4.1%
˙
ψ
24.6
o
/s 0.4% 2.6%
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
8
0 5 10 15 20 25
-5
0
5
O1,4w, Front lateral tire force F
y1
(kN)
0 5 10 15 20 25
-2
0
2
O1,4w, Rear lateral tire force F
y2
(kN)
0 5 10 15 20 25
-10
-5
0
O1,4w, Front longitudinal tire force F
x1
(kN)
Times (s)
Measurement
O1,4w
Measurement
O1,4w
Measurement
O1,4w
5155 N
Figure 6: Experimental test. O
1,4w
results in comparison
with measurements.
was set to 5155 N). In spite of these false initial-
izations the estimations converge quickly to the mea-
sured values, showing the good convergence proper-
ties of the observer. Moreover, the O
1,4w
observer
produces satisfactory estimations close to measure-
ments (normalized mean and standard deviations er-
rors are less than 7 %). These good experimental re-
sults confirm that the observer approach may be an
appropriate way for the estimation of tire-forces.
5.2 Block 2: Observer O
2,LAM
Results
During the test, (F
x1
,F
y1
,F
y2
) inputs of O
2,LAM
were
originally those from the O
1,4w
observer. The V
g
in-
put of O
2,LAM
was obtained from the wheel angular
velocities. In order to demonstrate the improvement
provided by the observer using the linear adaptive
force model (O
2,LAM
, equation 16), another observer
constructed with a linear fixed force model is used
in comparison (denoted O
rl
, equation 15, described
in (Baffet et al., 2006b)). The robustness of the two
observers is tested with respect to tire-road friction
variations by performing the tests with different cor-
nering stiffness parameters ([C
1
,C
2
] ∗ 0.5,1, 1.5). The
observers were evaluated for the same test presented
in section 5.
Figure 7 shows the estimation results of observer O
rl
for rear sideslip angle. Observer O
rl
gives good re-
sults when cornering stiffnesses are approximately
known ([C
1
,C
2
] ∗ 1). However, this observer is not
robust when cornering stiffnesses change ([C
1
,C
2
] ∗
0.5,1.5).
0 5 10 15 20 25
-5
0
5
Orl, Rear Sideslip angle (°)
(C
1
, C
2
)
(C
1
, C
2
)*0.5
measurement
(C
1
, C
2
)*1.5
Figure 7: Observer O
rl
using a fixed linear force model, rear
sideslip angle estimations with different cornering stiffness
settings.
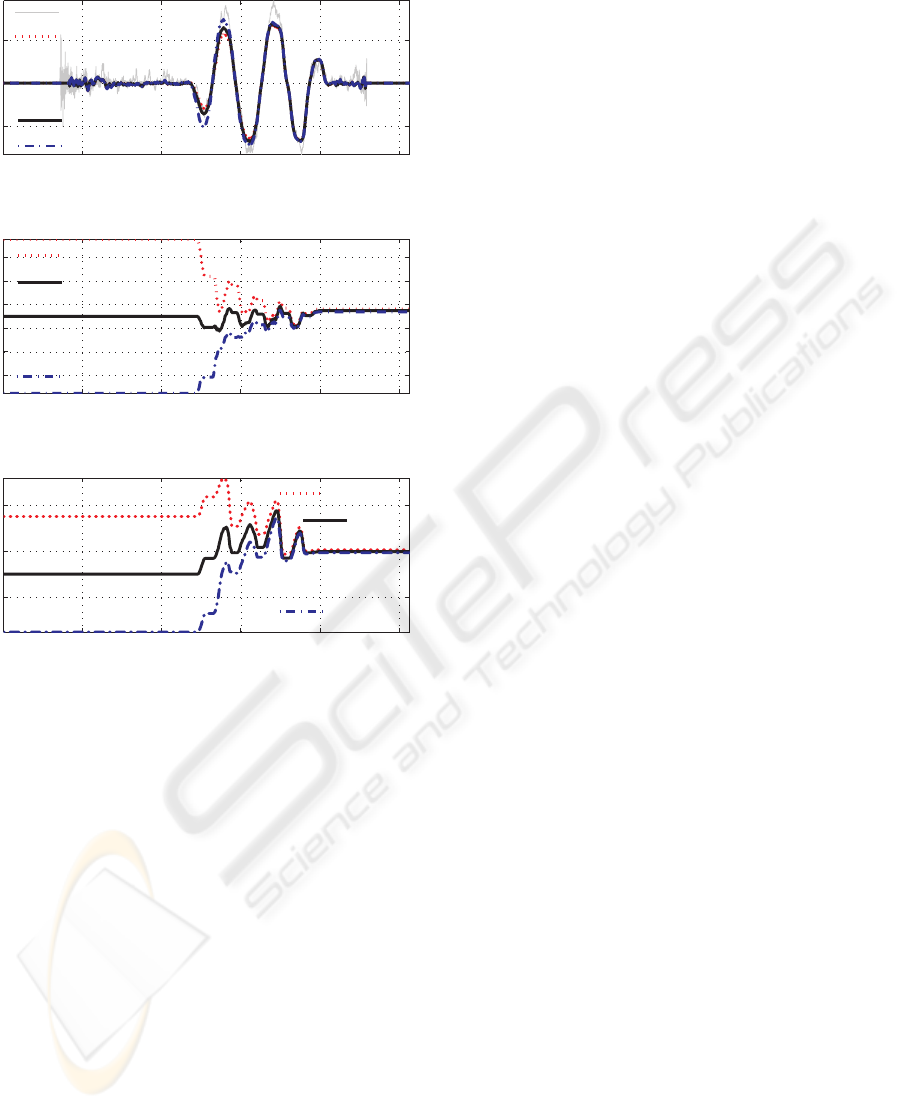
Figure 8 and table 2 show estimation results for
the adaptive observer O
2,LAM
. The performance ro-
bustness of O
2,LAM
is very good, since sideslip angle
is well estimated irrespective of cornering stiffness
settings. This result is confirmed by the normalized
mean errors (Table 2) which are approximately con-
stant (about 7 %). The front and rear cornering stiff-
ness estimations (C
i
+ ∆C
i
) converge quickly to the
same values after the beginning of the slalom at 12 s.
Table 2: Observer O
LAM
, rear sideslip angle estimation re-
sults, maximum absolute value, normalized mean errors.
O
2,LAM
0.5(C
1
,C
2
) (C
1
,C
2
) 1.5(C
1
,C
2
)
maxkβ
2
k 3.0
o
3.0
o
3.0
o
Mean
7.4% 7.0% 7.2%
6 CONCLUSIONS AND FUTURE
WORK
This study deals with two vehicle-dynamic observers
constructed for use in a two-block estimation pro-
cess. Experimental results show that the first observer
O
1,4w
gives force estimations close to the measure-
ments, and the second observer O
2,LAM
provides good
ESTIMATION PROCESS FOR TIRE-ROAD FORCES AND VEHICLE SIDESLIP ANGLE
9
0 5 10 15 20 25
-2
0
2
O2,LAM, Rear sideslip angle (°)
0 5 10 15 20 25
4
5
6
7
8
9
x 10
4
O2,LAM, Front cornering stiffness (N.rad
-1
)
0 5 10 15 20 25
4
6
8
x 10
4
O2,LAM, Rear cornering stiffness (N.rad
-1
)
(C
1
, C
2
)*1.5
(C
1
, C
2
)
(C
1
, C
2
)*0.5
measurement
(C
1
, C
2
)*1.5
(C
1
, C
2
)*1.5
(C
1
, C
2
)
(C
1
, C
2
)*0.5
(C
1
, C
2
)
(C
1
, C
2
)*0.5
Figure 8: O
2,LAM
adaptive observer, Sideslip angle estima-
tion results, Front and rear cornering stiffness estimations
C
i
+ ∆C
i
, with different cornering stiffness settings.
sideslip angle estimations with good robustness prop-
erties relative to cornering stiffness changes. This re-
sult justifies the use of an adaptive tire-force model to
take into account road friction changes.
Future studies will improve vehicle/road models in or-
der to widen validity domains for observers. Subse-
quent vehicle/road models will take into account roll
and vertical dynamics.
REFERENCES
Baffet, G., Stephant, J., and Charara, A. (2006a). Sideslip
angle lateral tire force and road friction estimation in
simulations and experiments. Proceedings of the IEEE
conference on control application CCA Munich Ger-
many.
Baffet, G., Stephant, J., and Charara, A. (2006b). Vehi-
cle sideslip angle and lateral tire-force estimations in
standard and critical driving situations: Simulations
and experiments. Proceedings of the 8th International
Symposium on Advanced Vehicle Control AVEC2006
Taipei Taiwan.
Canudas-De-Wit, C., Tsiotras, P., Velenis, E., Basset, M.,
and Gissinger, G. (2003). Dynamic friction models for
road/tire longitudinal interaction. volume 39, pages
189–226. Vehicle System Dynamics.
Kalman, R. E. (1960). A new approach to linear filtering
and prediction problems. volume 82, pages 35–45.
Transactions of the ASME - PUBLISHER of Basic
Engineering.
Kiencke, U. and Nielsen, L. (2000). Automotive control
system. Springer.
Lakehal-ayat, M., Tseng, H. E., Mao, Y., and j. Karidas
(2006). Disturbance observer for lateral velocity es-
timation. Proceedings of the 8th International Sympo-
sium on Advanced Vehicle Control AVEC2006 Taipei
Taiwan.
Lechner, D. (2002). Analyse du comportement dynamique
des vehicules routiers legers: developpement d’une
methodologie appliquee a la securite primaire. Ph.D.
dissertation Ecole Centrale de Lyon France.
Mohinder, S. G. and Angus, P. A. (1993). Kalman filtering
theory and practice. Prentice hall.
Nijmeijer, H. and der Schaft, A. J. V. (1990). Nonlinear
dynamical control systems. Springer-Verlag.
Pacejka, H. B. and Bakker, E. (1991). The magic formula
tyre model. pages 1–18. Int. colloq. on tyre models
for vehicle dynamics analysis.
Rabhi, A., M’Sirdi, N. K., Zbiri, N., and Delanne, Y.
(2005). Vehicle-road interaction modelling for esti-
mation of contact forces. volume 43, pages 403–411.
Vehicle System Dynamics.
Ray, L. (1997). Nonlinear tire force estimation and road
friction identification : Simulation and experiments.
volume 33, pages 1819–1833. Automatica.
Segel, M. L. (1956). Theorical prediction and experimen-
tal substantiation of the response of the automobile to
steering control. volume 7, pages 310–330. automo-
bile division of the institut of mechanical engineers.
Stephant, J., Charara, A., and Meizel, D. (Available online 5
June 2006). Evaluation of a sliding mode observer for
vehicle sideslip angle. Control Engineering Practice.
Ungoren, A. Y., Peng, H., and Tseng, H. E. (2004). A study
on lateral speed estimation methods. volume 2, pages
126–144. Int. J. Vehicle Autonomous Systems.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
10
