
ON COMPUTING MULTI-FINGER FORCE-CLOSURE GRASPS
OF 2D OBJECTS
Belkacem Bounab
* **
, Daniel Sidobre
** ‡
*
Mechanical Laboratory of Structures, EMP, Algiers, Algeria
**
LAAS-CNRS, Toulouse, France
‡
Paul Sabatier University, Toulouse, France
Abdelouhab Zaatri
Advanced Technologies Laboratory, Mentouri University, Constantine, Algeria
Keywords: Multi-Fingered grasps, Force-Closure, Cen
tral Axis, Grasp Wrenches.
Abstract: In this paper, we develop a new algorithm for
computing force-closure grasps of two-dimensional (2D)
objects using multifingred hand. Assuming hard-finger point contact with Coulomb friction, we present a
new condition for multi-finger to form force-closure grasps. Based on the central axis of contact wrenches,
an easily computable algorithm for force-closure grasps has been implemented and its efficiency has been
demonstrated by examples.
1 INTRODUCTION
Grasping remains one of the fundamental problems
in robotics. Research has been directed towards the
design and control of multifingred dexterous robot
hand to increase robot dexterity and adaptability (Li
J-W., Jin M-H. and Liu H. 2003).
A main property of a multi-finger stable grasp is
force-cl
osure. It’s the ability to balance any external
object wrenches by applying appropriate finger
wrenches at the contact points. In other words, a
grasp on an object is force-closure if and only if
arbitrary force and torque can be exerted on the
object through the fingers (Yan-Bin Jia 2004). It’s
complicated to assure that the applied finger forces
remain in the friction cone at all times so as to avoid
fingers slippage on the object surface (Murray R., Li
Z. and Sastry S. 1994).
Human can use more than three/four fingers of
hi
s hand to manipulate objects. During such tasks,
there exists a lot of contact points between the hand
and grasped object. The question is: how can we
evaluate or compute force-closure of such grasps?
In this paper, we are focu
sed on the problem of
computing force-closure of multifingered grasps of
2D objects. We develop a new approach for force-
closure test independently of fingers's number. This
quality is obtained using the mechanical properties
of the grasp wrench.
2 RELATED WORK
Force-closure test is an essential problem in
grasping. However, The notion of force-closure does
not directly yield a method for force-closure test
(Sudsang A. and Phoka T. 2005). Some necessary
and sufficient conditions for force-closure were
formulated in order to derive force-closure tests. A
commonly used necessary and suffecient force-
closure condition given by (Salisbury J.K. and Roth
B. 1982) allowed a force-closure test to be
performed by checking whether the origin is strictly
inside the convex hull of the primitive contact
wrenches. This test also provided an underlying idea
to recent work in grasping (
D. Ding, Y-H Liu, and S.
Wang 2001
). Nguyen (Nguyen, V.D. 1988) formally
demonstrated for 2-fingered grasps that non-
marginal equilibrium grasps achieve force-closure.
Recently, (Li J-W., Jin M-H. and Liu H. 2003)
proposed a necessary and suffecient condition for 3-
fingered force-closure grasps based on (Ponce J. and
Faverjon B. 1995) and developed an algorithm for
three-finger force-closure test. Their method begins
by the processing of friction cones using an
253
Bounab B., Sidobre D. and Zaatri A. (2007).
ON COMPUTING MULTI-FINGER FORCE-CLOSURE GRASPS OF 2D OBJECTS.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 253-258
DOI: 10.5220/0001624102530258
Copyright
c
SciTePress
operation called disposition H, then, they attack the
problem of determining the intersection of the three
double-side friction cones.
The rest of the paper is organized as follow, in
section 3, we present the background of grasp
wrenches central axes and the relationship between
these axes and grasp force-closure. In section 4, we
propose a new multi-finger force-closure condition.
Hence, a novel algorithm is presented, which its
implementation needs little geometric computations.
In section 5, we present some multi-finger grasps
examples. Finally, we conclude with future works.
3 CENTRAL AXIS OF GRASP
WRENCHES
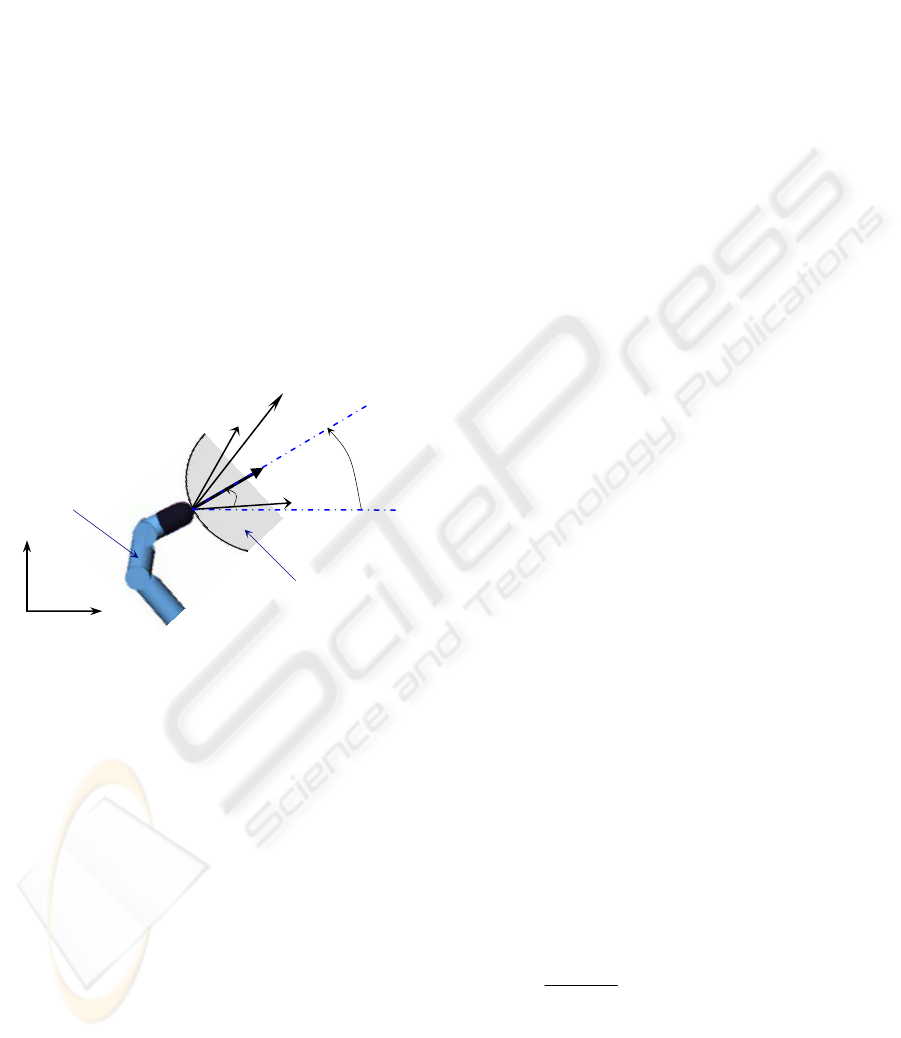
Based on Coulomb friction model, a contact force is
constrained to lie in a friction cone centered about
the internal surface normal at contact point.
Figure 1: Contact between the finger and an object
showing friction cone.
As shown in figure 1, a friction cone at is
bounded by vectors and , and any force is a
nonnegative combination of these two vectors. In 2D
case, contact forces are
i
C
1i
n
2i
n
i
f
m,...,iaa
iiiii
1
2211
=+= nnf
(1)
With
0≥0≥
21 ii
a,a
to avoid fingertips slippage.
m is the number of contact points.
If is the surface normal at the contact
point and is the friction angle that depends on
materials in contact (finger and object) then,
i
N
i
C
α
)N,2(Atanβ
iii
XYN=
(2)
and
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
+
=
)αβSin(
)αβCos(
i
i
i1
n
; (3)
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
−
=
)αβSin(
)αβCos(
i
i
i2
n
The contact wrench produced by reduced at the
point O is defined by
i
f
⎥
⎦
⎤
⎢
⎣
⎡
×
=
ii
i
i
fOC
f
w
(4)
()
⎥
⎦
⎤
⎢
⎣
⎡
+×
+
=
2211
2211
iiiii
iiii
aa
aa
nnOC
nn
The external wrench applied by the robotic hand
on the grasped object is given by
⎥
⎦
⎤
⎢
⎣
⎡
==
=
o/c
c
m
i
io/c
τ
F
wW
∑
1
(5)
With
()
()()
∑
∑∑
1
2211
1
2211
1
m
i
iiiiio/c
m
i
iiii
m
i
ic
aa
aa
=
==
+×=
+==
nnOCτ
nnfF
(6)
1i
n
i
C
i
N
i
β
2i
n
α
finger
ob
j
ect
X
Y
O
i
f
In two-dimensional grasps case, we have
(
)
T
cycxc
,F,F 0=F
and (7)
()
T
o/zo/c
τ,, 00=τ
With
()
()
()()
⎪
⎪
⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎪
⎪
⎨
⎧
+⋅=
+⋅=
+⋅=
=
=
=
∑
∑
∑
1
2211
1
2211
1
2211
∧
m
i
iiiiio/z
m
i
iiiicy
m
i
iiiicx
aaτ
aaF
aaF
nnOCZ
nnY
nnX
(8)
Poinsot’s theorem: “Every collection of wrenches
applied to a rigid body is equivalent to a force
applied along a fixed axis (central axis) and a
torque around the same axis” (Murray R., Li Z.,
Sastry S. 1994). Using this theorem, points of the
central axis of contact wrench are given by
C
Δ
⎪
⎩
⎪
⎨
⎧
=
+
×
=
0Fτ
0FF
F
τF
co/c
cc
c
o/cc
C
ifλ
ifλ ≠
Δ
2
: (9)
(
ℜ∈λ
)
The axis is a directed line through a point.
For , the central axis is a line in the
C
Δ
0F ≠
c
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
254

C
1
C
2
C
3
(a)
(b)
(a)
(b)
c
F
direction going through the point such as
.
the point such as
.
0
Q
()
2
0 co/cc
/ FτFOQ ×=
≠
0
Q
()
2
0 co/cc
/ FτFOQ ×=
0F =
c o/c
0≠
F
Δ
0F ≠
For , the axis is a line in the
τ
direction
going through the origin (Murray R., Li Z., Sastry S.
1994).
For , the axis is a line in the
τ
direction
going through the origin (Murray R., Li Z., Sastry S.
1994).
0F =
c o/c
In two-dimentional case with non null forces
(
F
c
), the torque around the central axis is zero.
The force
c
is an invariant vector and always
parallel to
C
. Figure 2 shows the central axis in 2D
grasps when
c
. it is Characterized by the
following equation
In two-dimentional case with non null forces
(
F
c
), the torque around the central axis is zero.
The force
c
is an invariant vector and always
parallel to
C
. Figure 2 shows the central axis in 2D
grasps when
c
. it is Characterized by the
following equation
0
F
Δ
0F ≠
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+⋅
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
=
cx
o/z
cx
cy
F
τ
x
F
F
y
(10)
Figure 2: Central axis parameters.
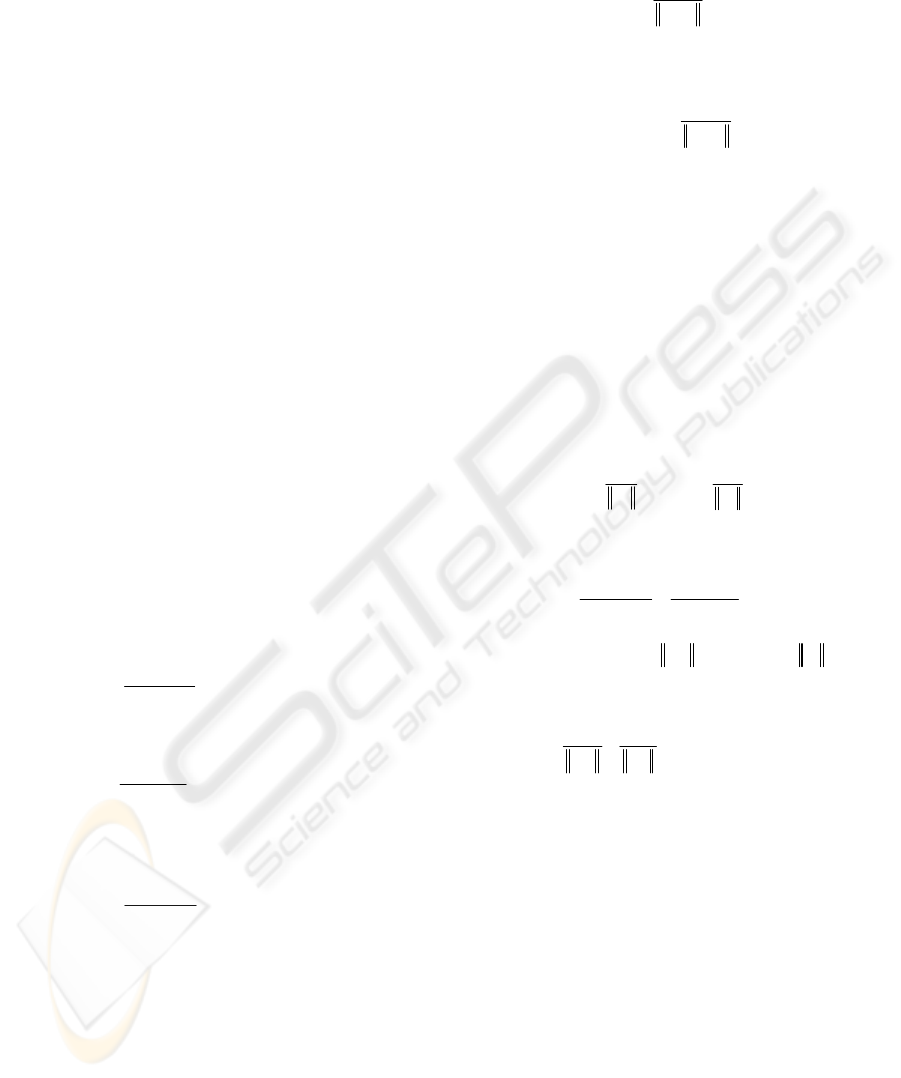
In figure 3-a, we present a first example of three-
finger 2D grasp. By varying forces randomly (in
orientation and amplitude) inside friction cones (the
friction angle), figure 3-b illustrates all possible
central axes of grasp wrenches.
i
f
There is no central axis passing through the gray
region. In this region, positive torque can’t be
exerted on the object through the finger contacts.
This grasp can’t achieve force-closure. Exactly, the
grasp can not achieve torque-closure because the
object turn around the gray region in figure 3-a.
Figure 3: a) no force-closure 2D grasp, b) all central axes
of grasp wrenches ( ).
°= 5α
°= 10α
)
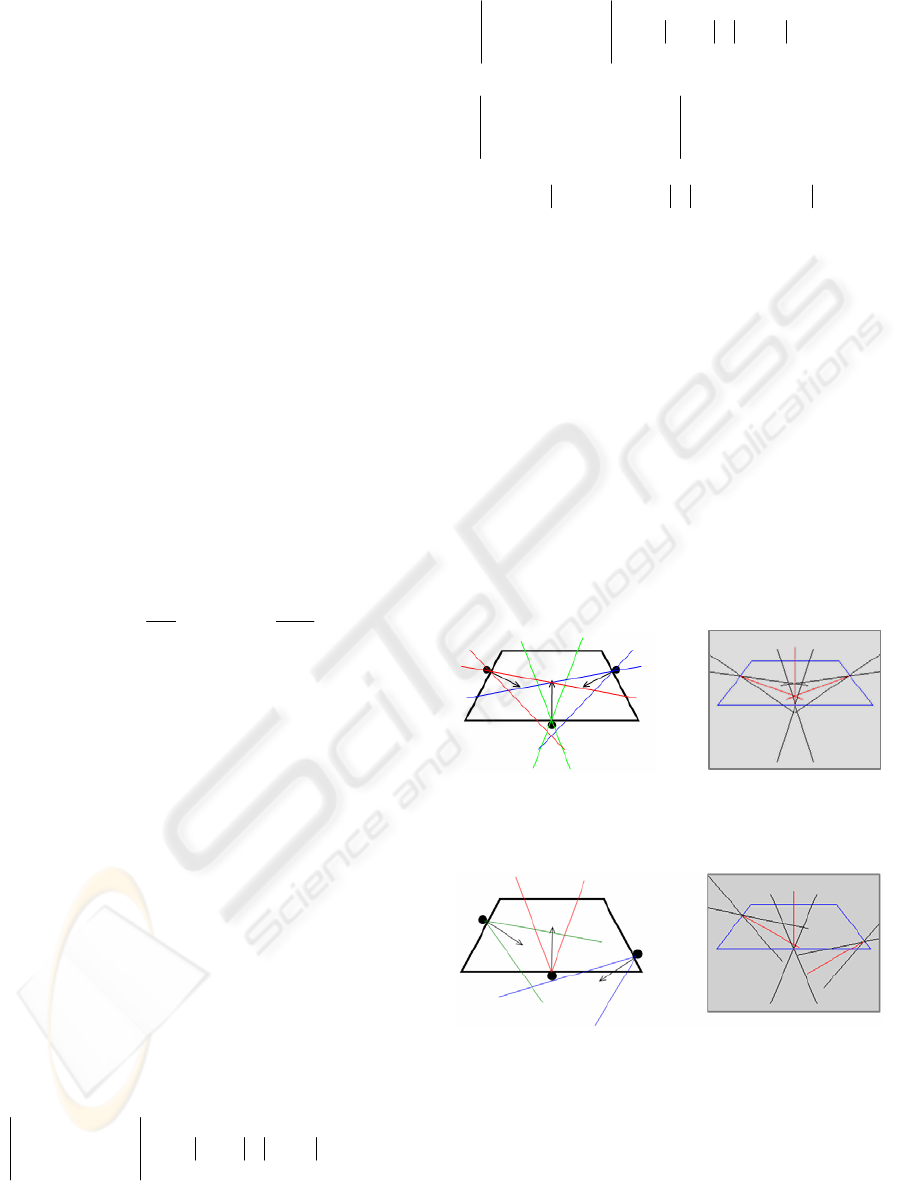
A second example is shown in figure 4; we
present a non-force-closure grasp using five contact
points. This grasp is instable and the object turn
around axis in the gray region (figure 4-a).
Z
Figure 4: a) non-force-closure five-fingers grasp;
b) central axes of grasp wrenches ( ).
When a grasp is force closure, the central axes of
grasp wrenches can wholly sweep the plan . In
the third example, shown in figure 5, we use the
same finger’s configuration as figure 3 but we
change the friction angle . The grasp
becomes force-closure.
(
YX,
°= 20α
X
Y
O
0
Q
C
Δ
c
F
Figure 5: a) three fingers force-closure 2D grasp,
b) central axes of grasp wrenches ( ).
°= 20α
According to these three examples, we can
conclude that the distribution of central axes can
confirm if a grasp is force-closure or not (for any
contact points number).
4 FORCE-CLOSURE AND
EQUILIBRIUM CONDITION
In 2D grasps and based on Poinsot’s theorem, we
can give the following definition.
+Torque
(a)
(b)
Definition 1: Any external wrench applied by the
robotic hand on a 2D object is equivalent to a force
along a central axis of this wrench. When the force
is equal to zero, the external wrench is equivalent to
a torque about the grasp plan normal.
Definition 2: A grasp on an object is force-closure
if and only if any arbitrary force and torque can be
exerted on the object through the finger contacts
(Yan-Bin Jia 2004). There are other force-closure
definitions, but this one is more useful for our
deduction.
Definition 3: A grasp is said to achieve
equilibrium when it exists forces (not all of them
being zero) in the friction cones at the fingertips
ON COMPUTING MULTI-FINGER FORCE-CLOSURE GRASPS OF 2D OBJECTS
255
o/t
o/t
t
τ
τ
U =
o/c
o/c
tc
τ
τ
UU =−=
c
c
c
F
U =
such that the sum of the corresonding wrenches is
zero (Sudsang A., Phoka T. 2005).
4.1 Equilibrium Condition
During objects grasp operations there exist two
kinds of external wrenches applied on the
manipulated object, task wrench (applied by the
environment) and contact wrench (applied by the
robotic hand fingers). Based on definitions 1 and
definitions 3, we derive a new proposed necessary
and sufficient equilibrium condition.
Proposition 1: A multifingers grasp is said to
achieve equilibrium if and only if the central lines of
contact wrench and task wrench have the same
support and opposite direction.
Proof:
i) Sufficient Condition:
the external contact wrench given by equation (5)
and task wrench is given by
⎥
⎦
⎤
⎢
⎣
⎡
=
o/t
t
o/t
τ
F
W
(11)
F
t
t
t
F
F
U =
The object is in equilibrium if:
{}
⎩
⎨
⎧
−=
−=
⇒=+
o/to/c
tc
o/to/c
ττ
FF
0WW
(12)
From Relation (9), the central axis of contact
wrench is defined by
cc
c
o/cc
c
λ F
F
τF
OP +
×
=
2
(
(13)
c
t
o/t
c
o/c
λ U
F
τ
F
τ
⋅=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
)
ℜ∈
c
λ
Substuting (12) in (13) lead to
tt
t
o/tt
c
λ F
F
τF
OP +
×
=
2
(14)
()
ℜ−= ∈
ct
λλ
Relation (14) defines the central axis of task
wrench given by
tt
t
o/tt
t
λ F
F
τF
OP +
×
=
2
(
(15)
)
ℜ∈
t
λ
In the case , the points are given by
0F =
t c
P
o/tto/ccc
λλ ττOP ==
:
()
ℜ
−= ∈
ct
λλ
(16)
In both cases, Relations (14) and (16), the two
wrenches (contact and task) should have the same
central line with opposite directions. ■
ii) Necessary Condition:
Now, if we consider two wrenches reduced at the
same point
O and they have the same central line
with opposite directions. We have two cases:
a) if
0F
=
t
then the central axis of the task wrench is
defined by the unit vector where:
t
U
If the two wrenches have the same central line
with opposite direction then the contact central axis
is defined by the following unit vector:
We conclude that:
(
)
(
)
0<⋅
⋅
co/tco/c
SgnSgn UτUτ
(17)
Sgn is the sign function that computes the sign of
the leading coefficient of expression.
b) if , having the same central axis with
opposite direction implies
0F ≠
t
(
)
(
)
0<⋅
⋅
ctcc
SgnSgn UFUF
(18)
Where
c
and
t
define the unit vectors of the two
central axes. We have:
U U
;
Using hypothesis that there is one central line and
form relation (9), we have
22
t
o/tt
c
o/cc
F
τF
F
τF ×
=
×
(19)
Then, replacing
ccc
UFF =
;
ctt
UFF −=
in
Relation (19) we obtain
: (20)
(
ℜ∈λ
)
In 2D case, the equation (20) can be only
satisfied when
0
=
λ . therefore, the two torques have
opposite signes:
(
)
(
)
0<⋅
⋅
ZτZτ
o/to/c
SgnSgn
(21)
Relations (17, 18 and 21) imply that the contact
wrench can generate grasp wrenches that opposite
the external task wrench. Robotic hand can control
its fingers force to produce the appropriate
force/torque magnitude that achieving equilibrium.■
4.2 Force-Closure Condition
In particular, force-closure implies equilibrium, but
there are wrench systems that achieve equilibrium
but not force closure (Li Jia-Wei. and Cia He-Gao,
2003).
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
256
Using force-closure condition in definition 2, we
can derive this definition
Using force-closure condition in definition 2, we
can derive this definition
Definition 4: A grasp is force closed, if and only if
it is in equilibrium for any arbitrary wrench (Bicchi
A., Kumar V. 2000, Nguyen, V.D. 1988). Thus,
force closure implies, fingers contact wrenches can
balance any external task wrenches.
Definition 4: A grasp is force closed, if and only if
it is in equilibrium for any arbitrary wrench (Bicchi
A., Kumar V. 2000, Nguyen, V.D. 1988). Thus,
force closure implies, fingers contact wrenches can
balance any external task wrenches.
According to proposition 1 and definition 4, we
propose a new force-closure necessary and sufficient
condition.
According to proposition 1 and definition 4, we
propose a new force-closure necessary and sufficient
condition.
Proposition 2: A multifingred grasp of 2D objects
is said to achieve force-closure if and only if the
central axis of the fingers contact wrenches can
sweep the grasp plan at any direction.
Proposition 2: A multifingred grasp of 2D objects
is said to achieve force-closure if and only if the
central axis of the fingers contact wrenches can
sweep the grasp plan at any direction.
4.3 Force-Closure Test Algorithm 4.3 Force-Closure Test Algorithm
According to the proposition 2, we present a new
algorithm for computing 2D multi-fingers grasps of
arbitrary object.
According to the proposition 2, we present a new
algorithm for computing 2D multi-fingers grasps of
arbitrary object.
Based on the central axis equation defined in
relation (10), this central line can sweep the plan in
all directions if
Based on the central axis equation defined in
relation (10), this central line can sweep the plan in
all directions if
()
c
,k,k Δ
2
21
∃ℜ∈∀
Satisfy Satisfy
21
kxky
(a) (b)
(a)
(b)
()
c
,k,k Δ
2
21
∃ℜ∈∀
21
kxky
+
⋅=
Where
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
=
cx
o/z
cx
cy
F
τ
k;
F
F
k
11
In other word, for any axis on the plan or
along the vertical , this axis must be one of the
grasp wrench central axes.
(
YX,
)
Z
This condition implies that the quantities and
must take all real number, therefore
1
k
2
k
[]
[]
[]
⎪
⎩
⎪
⎨
⎧
∀+∞∞−∈
+∞∞−∈
+∞∞−∈
O,τ
,F
,F
o/c
cy
cx
(21)
The third sub-condition is function of the reduced
point of the torque, to cover the entire grasp plan; we
test this condition at all the vertices of the
intersection of the m double-side friction cones
(named ). In general case of m contact points, the
number of intersection points is given by
k
B
(
∑
−
=
−⋅=
1
1
4
m
k
B
kmN
k
)
(22)
Hence, a multifingred 2D grasp is said to achieve
force-closure if each of these inequalities are true.
()
()
∑∑
==
⋅+⋅<+⋅
m
i
ii
m
i
ii
1
21
1
21
nXnXnnX (23-1)
()
()
∑∑
==
⋅+⋅<+⋅
m
i
ii
m
i
ii
1
21
1
21
nYnYnnY (23-2)
()()
()()
()
∑
∑
=
=
∧⋅+∧⋅
<+∧⋅
m
i
iikiik
m
i
iiik
1
21
1
21
nCBZnCBZ
nnCBZ
(23-3)
From mechanical viewpoint, inequality (23-1)
implies that fingers can generate forces
along and
X X
−
, (23-2) means that fingers can exert
force on the object along and . If the last
inequality (23-3) is true
Y Y−
(
)
k
B
N...kfor 1=
then the
finger can exert torque on object about the vertical
axis in both directions.
Z
5 EXAMPLES
We present bellow some grasp examples using three,
four and five fingers. In both cases (force-closure
and no force-closure), we show the distribution of
grasp wrench central axes.
a) Three-finger grasps
Figure 6: a) a three-finger force-closure 2D grasp, b)
central axes of grasp wrenches ( ).
°=15α
Figure 7: a) a three-finger force-closure 2D grasp, b)
central axes of grasp wrenches ( ).
°= 20α
ON COMPUTING MULTI-FINGER FORCE-CLOSURE GRASPS OF 2D OBJECTS
257

(a)
(b)
Figure 8: a) no force-closure 2D grasp, b) central axes of
grasp wrenches (
α
). Grasp wrenches can’t generate
a negative torque in grey zone.
(a)
(b)
(a)
(b)
(a)
(b)
°=10
)
Figure 9: a) no force-closure 2D grasp, b) central axes of
grasp wrenches (
α
).Grasp wrenches can’t exert a
force along
(
axis and can’t generate torques in two-
direction in unreachable zones in (b).
°=10
Y−
b) Four-finger grasps
Figure 10: a) four-finger force-closure 2D grasp, b) central
axes of grasp wrenches ( ).
°=10α
c) Five-finger grasps
Figure 11: a) five-finger force-closure 2D grasp, b) central
axes of grasp wrenches ( ).
°= 25α
6 CONCLUSION AND FUTURE
WORK
We have presented a new equilibrium and force-
closure conditions for multifingred 2D grasps. A
novel algorithm for computing 2D multi-finger
force-closure grasps of arbitrary objects was
developed, which is very simple and needs little
geometric computations. Therefore, it can be
implemented in real-time multifingred grasp
programming. Our future work will be concentrated
on the extending of this algorithm to the 3D grasps
and the quality measurement of grasps.
REFERENCES
Bicchi A., Kumar V. (2000). Robotic grasping and
Contact: A review. In
Proc. IEEE ICRA, pp. 348–352.
Ding D., Liu Y-H, and S. Wang (2001). Computation of 3-
d form-closure grasps. In
IEEE Transactions on
Robotics and Automation
, 515-522.
Li J-W., Cia He-Gao (2003). On Computing Three-Finger
Force-Closure Grasps of 2-D and 3-D Objects.
Transaction on Robotics & Automation. IEEE
Proceeding, 155-161.
Li J-W., Jin M-H., Liu H. (2003). A New Algorithm for
Three-finger Force-Closure Grasp of Polygonal
Objects. In
International Conference on Robotics &
Automation.
IEEE Proceeding, 1800-1804.
Murray R., Li Z., Sastry S. (1994).
A Mathematical
Introduction to Robotic Manipulation,
Boca Raton,
FL: CRC press.
Nguyen, V.D. (1988). Constructing force-closure grasps.
In
Journal of Robotics Research, vol. 7, no. 3, pp. 3-
16.
Ponce J. and Faverjon B.. (1995). On computing three-
finger force-closure grasps of polygonal objects. In
IEEE Transactions on Robotics and Automation, 868-
881.
Salisbury J.K. and Roth B. (1982) Kinematic and force
analysis of articulated hands
. In Journal of
Mechanisms, Transmissions, and Automation in
Design,
105, 33-41.
Sudsang A., Phoka T. (2005). Geometric Reformulation of
3-Fingred Force-Closure Condition. In
International
Conference on Robotics & Automation.
IEEE
Proceeding, 2338-2343.
Yan-Bin Jia (2004). Computation on Parametric Curves
with an Application in Grasping. In
the International
Journal of Robotics Research,
vol. 23, No. 7-8, 825-
855.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
258
