
COLLABORATIVE CONTROL IN A HUMANOID DYNAMIC TASK
Diego Pardo and Cecilio Angulo
GREC - Knowledge Engineering Research Group
UPC - Technical University of Catalonia
Avda. Victor Balaguer s/n. Vilanova i la Geltr
´
u, Spain
Keywords:
Robot control architecture, Sensorimotor learning, Coordination policy, Reinforcement learning.
Abstract:
This paper describes a collaborative control scheme that governs the dynamic behavior of an articulated mobile
robot with several degrees of freedom (DOF) and redundancies. These types of robots need a high level of co-
ordination between the motors performance to complete their motions. In the employed scheme, the actuators
involved in a specific task share information, computing integrated control actions. The control functions are
found using a stochastic reinforcement learning technique allowing the robot to automatically generate them
based on experiences. This type of control is based on a modularization principle: complex overall behavior
is the result of the interaction of individual simple components. Unlike the standard procedures, this approach
is not meant to follow a trajectory generated by a planner, instead, the trajectory emerges as a consequence
of the collaboration between joints movements while seeking the achievement of a goal. The learning of the
sensorimotor coordination in a simulated humanoid is presented as a demonstration.
1 INTRODUCTION
Robots with several Degrees of Freedom (DOF) and
redundant configurations are more frequently con-
structed; humanoids like Qrio (Kuroki et al., 2003),
Asimo (Hirai et al., 1998) or HRP-2 (Kaneko et al.,
2004), and entertainment robots like Aibo (Fujita and
Kitano, 1998) are examples of it. Complex move-
ments in complex robots are not easy to calculate, the
participation of multiple joints and its synchroniza-
tion requirements demands novel approaches that en-
dow the robot with the ability of coordination. An
attempt to drive the dynamics of its body optimally,
measuring its performance in every possible config-
uration, would bring to a combinational explosion of
its solution space.
The habitual use of simplified mathematical mod-
els to represent complex robotic systems, i.e., approx-
imating non-linearities and uncertainties, would result
in policies that execute approximately optimal con-
trol, thus, two major assumptions command the devel-
oped work. First, there is no pre-established mathe-
matical model of the physics of the robot’s body from
which a control law could be computed; and second,
the control design philosophy is focused on the ac-
tion performance of the robot and not on the trajectory
achievement by its joints; as an alternative, stochastic
reinforcement learning techniques applied to numeri-
cal simulation models are studied. An optimal control
problem, where a cost function is minimized to com-
pute the policies, is stated.
The goal of this work is to solve a multi-joint robot
motion problem where coordination is need. Plan-
ners and trajectory generators are usually in charge of
complex motions where many joints are involved and
the mechanical stabilization of the robot is in risk; the
relationship between sensory signals and motor com-
mands at the level of dynamics is viewed as a low
level brick in the building of control hierarchy. Here
we use a dynamic control scheme that also solves the
trajectory problem.
It is important to mention that a previous work
uses coordination at the level of dynamics to extend
a manipulator robot capacity (Rosenstein and Barto,
2001), their objective was to use a biologically in-
spired approach to profit synergical movements be-
tween joints, like human muscles relationship. They
use a hand-made pre-established PID controllers in
174
Pardo D. and Angulo C. (2007).
COLLABORATIVE CONTROL IN A HUMANOID DYNAMIC TASK.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 174-180
DOI: 10.5220/0001629001740180
Copyright
c
SciTePress
every joint of the robot and the final applied torque
in each motor is the linear combination of the PID’s
output, then collaboration is shown. The combina-
tion parameters are obtained by direct search meth-
ods (Rosenstein, 2003). By using linear controllers
to solve a nonlinear problem, they implement a hi-
erarchical motor program that runs various feedback
controllers, i.e, they switch between PID’s (parame-
ters and goal) in the middle of the motion.
Here we extend that result by proposing a more
general scheme, where sensor information is pro-
cessed in independent and specific layers to produce
coordinate control actions. Furthermore, at the ar-
chitecture definition, the control functions are no re-
stricted to PID’s and its linear combination. Addition-
ally, we use reinforcement learning to compute all the
architecture controllers.
This paper is organized as follows Section 2 is de-
voted to the presentation of the architecture and a lin-
ear implementation of practical use is outlined in 3;
while section 4 validates it through a simulation ex-
periment of a robot equilibrium dynamical task. Sec-
tion 6 gathers the conclusions and points to the future
work.
2 LAYERED COOPERATIVE
CONTROL
The Layered Cooperative Control (LCC) scheme is
meant to generate motions while solving a Dynamical
Task (DT). It is assumed that the final configuration of
the DT is known, i.e. the set point of the joints angles
is preestablished; but how to coordinate motions to
reach this configuration, restricted to its body dynam-
ics, is unknown. It is also assumed that the states of
the system are observable and that each joint position
is commanded by independent servos.
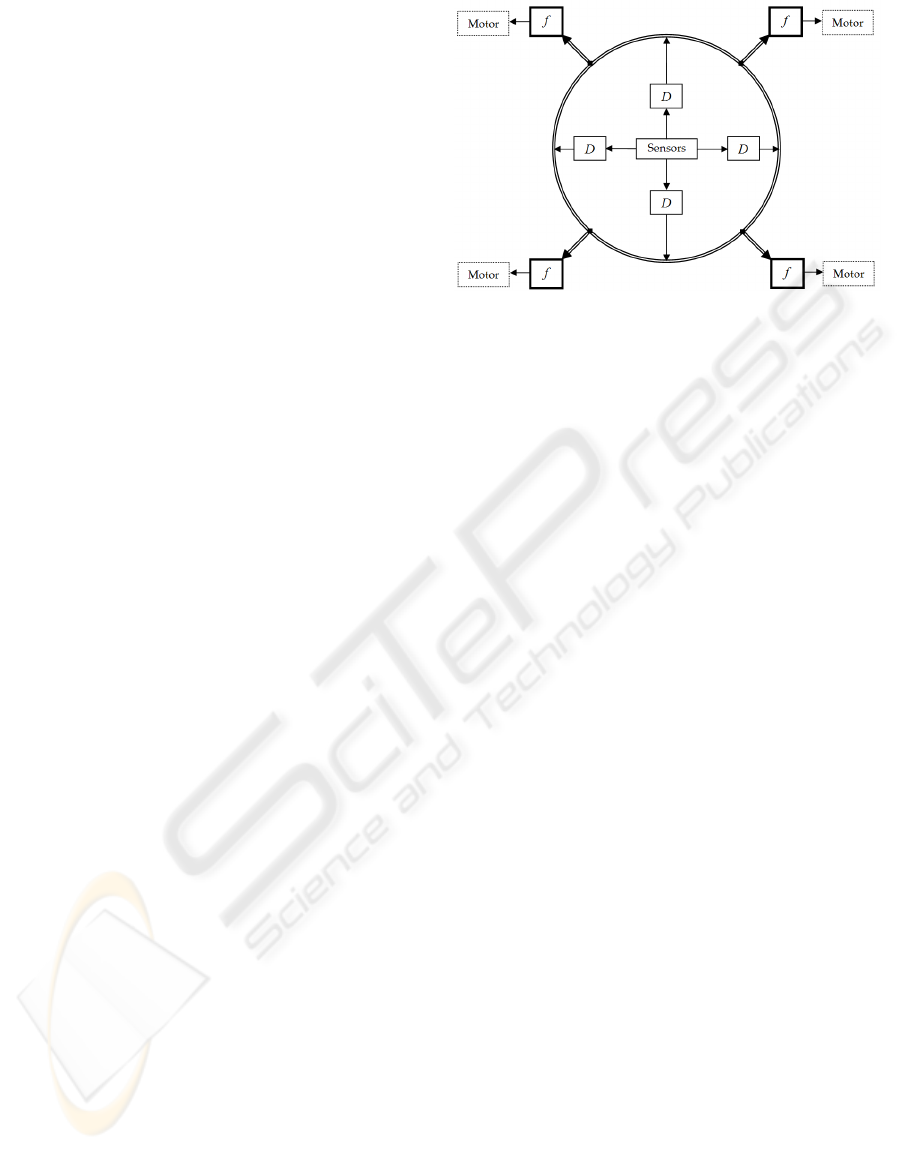
Figure 1 represents schematically the main idea
of the LCC. The control actions that drive the motors
are processed by two layers of controller functions.
Each component of the first layer (D) manipulates the
dynamics of a singular joint; the output of this layer
intends to position its corresponding joint in a pre-
viously specified angle, but it is filtered by the sec-
ond layer of controllers ( f ). Each motor is driven by
a different function, which calculates the control ac-
tion based on all the signals originated in the previous
layer.
The controllers of the first layer are related with
the dynamics of the link, they must be established
once. The second layer of functions ( f ) must be de-
signed facing the DT intended to be completed. Func-
tionally and computationally speaking the architec-
Figure 1: LCC Basic Idea : Two layers of control.
ture is layered; every time step two mappings take
place, one for error position reasons and the other
seeking coordination between joints.
Every controller of the second layer ( f ) uses the
information originated in all the first layer’s con-
trollers. This collaboration allows joint controllers to
know the dynamical state of the others, and then to
act according to it in order to complete the DT.
2.1 Architecture Formulation
Let the articulated mobile robot have n joints. Each
joint has an error based controller D
i
with (i = 1, ..., n)
in the first layer. This is a SISO function, whose input
is the error of the position of its respective joint (e
i
)
and whose output is a control action (u
i
). The error is
calculated using the sensor information providing the
actual position of the joint (θ
i
) and the already known
set point or goal configuration (θ
∗
i
).
e
i
= θ
i
− θ
∗
i
u
i
= D
i
(e
i
) i = 1, ..., n
Let the dynamical task have associated n controllers f
i
in the second layer with (i = 1, ..., n), these are MISO
functions whose inputs are the n outputs u
i
of the first
layer described above. The output of the second layer
functions v
i
is the velocity applied on the correspond-
ing motor (M
i
).
v
i
= f
i
(u
1
, ..., u
n
) i = 1, ..., n
The robot state is represented by a continuous time
dynamical system controlled by a parameterized pol-
icy,
˙x = g(x, v) + h(x) · v (1)
v = π
w
(x, v) (2)
where vector x represents the states of the robot, g and
h its dynamics, v the control action and π the control
policy parameterized by the vector w.
COLLABORATIVE CONTROL IN A HUMANOID DYNAMIC TASK
175

2.2 LCC Synthesis
Once the control scheme has been stated, the next
step is the definition of a methodology to compute the
functions ( f
i
, D
i
). Here a policy gradient reinforce-
ment learning (PGRL) algorithm is employed. PGRL
methods (see (Williams, 1992),(Sutton et al., 2000))
are based on the measurement of the performance of
a parameterized policy π
w
applied as control function
during a delimited amount of time. In order to mea-
sure the performance of the controller, the following
function is defined,
V (w) := J(x, π
w
(x)) (3)
where the measurement of the performance V of the
parameters w is done by defining the cost function J.
By restricting the scope of the policy to certain
class of parameterized functions u = π
w
(x), the per-
formance measure (3) is a surface where the maxi-
mum value corresponds to the optimal set of param-
eters w ∈ R
d
. The search for the maximum can be
performed by standard gradient ascent techniques,
w
k+1
= w
k
+ η∇
w
V (w) (4)
where η is the step size and ∇
w
V (w) is the gradient
of V (w) with respect to w. The analytical formulation
of this gradient is not possible without the acquisition
of a mathematical model of the robot. The numeri-
cal computation is also not evident, then, a stochastic
approximation algorithm is employed : the ‘weight
perturbation’ (Jabri and Flower, 1992), which esti-
mates the unknown gradient using a Gaussian random
vector to orientate the change in the vector parame-
ters. This algorithm is selected due to its good per-
formance, easy derivation and fast implementation;
note that the focus of this research is not the choice
of a specific algorithm, nor the development of one,
but rather the cognitive architecture to provide robots
with the coordination learning ability.
This algorithm uses the fact that, by adding to w
a small Gaussian random term z with E{z
i
} = 0 and
E{z
i
z
j
} = σ
2
δ
i j
, the following expression is a sample
of the desired gradient
α(w) = [J(w + z) − J(w)]· z (5)
Then, both layers’ controllers can be found using this
PGRL algorithm.
u
i
= D
k
i
(e
i
) (6)
v
i
= f
w
i
(u
1
, ..., u
n
)
In order to be consequent with the proposed definition
of each layer, the training of the vector parameters
must be processed independently; first the dynami-
cal layer and then the coordination one. It is assumed
that the movement has to take place between a limited
amount of time T , where signals are collected to com-
pute the cost function (3), then, the gradient is esti-
mated using (5) and a new set of parameters obtained
applying the update strategy of (4). Notice that in the
case of the first layer, each function D
k
i
is trained and
updated separately from the others of the same layer,
but when learning the coordinate layer, all the func-
tions f
w
i
must be updated at the same time, because
in this case the performance being measured is that of
the whole layer.
3 LINEAR IMPLEMENTATION
The previous description of the LCC is too general
to be of practical use. Then, it is necessary to make
some assumptions about the type of functions to be
used as controllers. A well known structure to control
the dynamic position of one link is the Proportional
Integral Derivative (PID) error compensator. It has
the following form,
u
i
= K
P
i
· e
i
+ K
D
i
·
de
i
dt
+ K
I
i
· e
i
dt (7)
The functionality of its three terms (K
P
, K
D
, K
I
) of-
fers management for both transient and steady-state
responses, therefore, it is a generic and efficient so-
lution to real world control problems. By the use
of this structure, a link between optimal control and
PID compensation is revealed to robotic applications.
Other examples of optimization based techniques for
tuning a PID are (Daley and Liu, 1999; Koszalka
et al., 2006).
The purpose of the second layer is to compute the
actual velocity to be applied on each motor by gath-
ering information about the state of the robot while
processing a DT. The PID output signals are collected
and filtered by this function to coordinate them. Per-
haps the simplest structure to manage this coordina-
tion is a gain row vector W
i
, letting the functions in
the second layer be the following,
f
w
i
(u) = W
i
· u
Then, a linear combination of u commands the coor-
dination. The matrix W
DT
m
encapsules all the infor-
mation about this layer for the mth DT.
W
DT
m
=
w
11
. . . w
in
.
.
.
.
.
.
.
.
.
w
n1
. . . w
nn
(8)
Where the term w
i j
is the specific weight of the jth
PID in the velocity computation of the joint i.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
176
4 HUMANOID COORDINATION
Classical humanoid robot motions are typically very
slow in order to maintain stability; e.g., the biped
walking based on Zero Moment Point (ZMP) (Vuko-
bratovic and Stepanenko, 1972) condition avoids
those states far from the pre-determined trajectory in
which the momentum is guaranteed. By doing this,
thousands of trajectories and capabilities of the robot
could be restricted. Highly dynamic capabilities need
those avoided states to perform quick and realistic
motions.
4.1 The Simulation Robot Environment
A simulated humanoid is employed as a test-bed to
evolve the controllers. It was modeled using Webots
(Michel, 2004), a 3D robot simulation platform . De-
tails can be obtained in (Webots, ).
This particular model of the full body humanoid
robot has a total of 25 DOF, each link torque is limited
to [−10, 10] Nm, additionally it has a camera, a dis-
tance sensor, a gps, 2 touch sensors in the feet, and a
led in the forehead. The model includes physical char-
acteristics; the software processes kinematic and dy-
namic simulation of the interaction between the robot
and its environment.
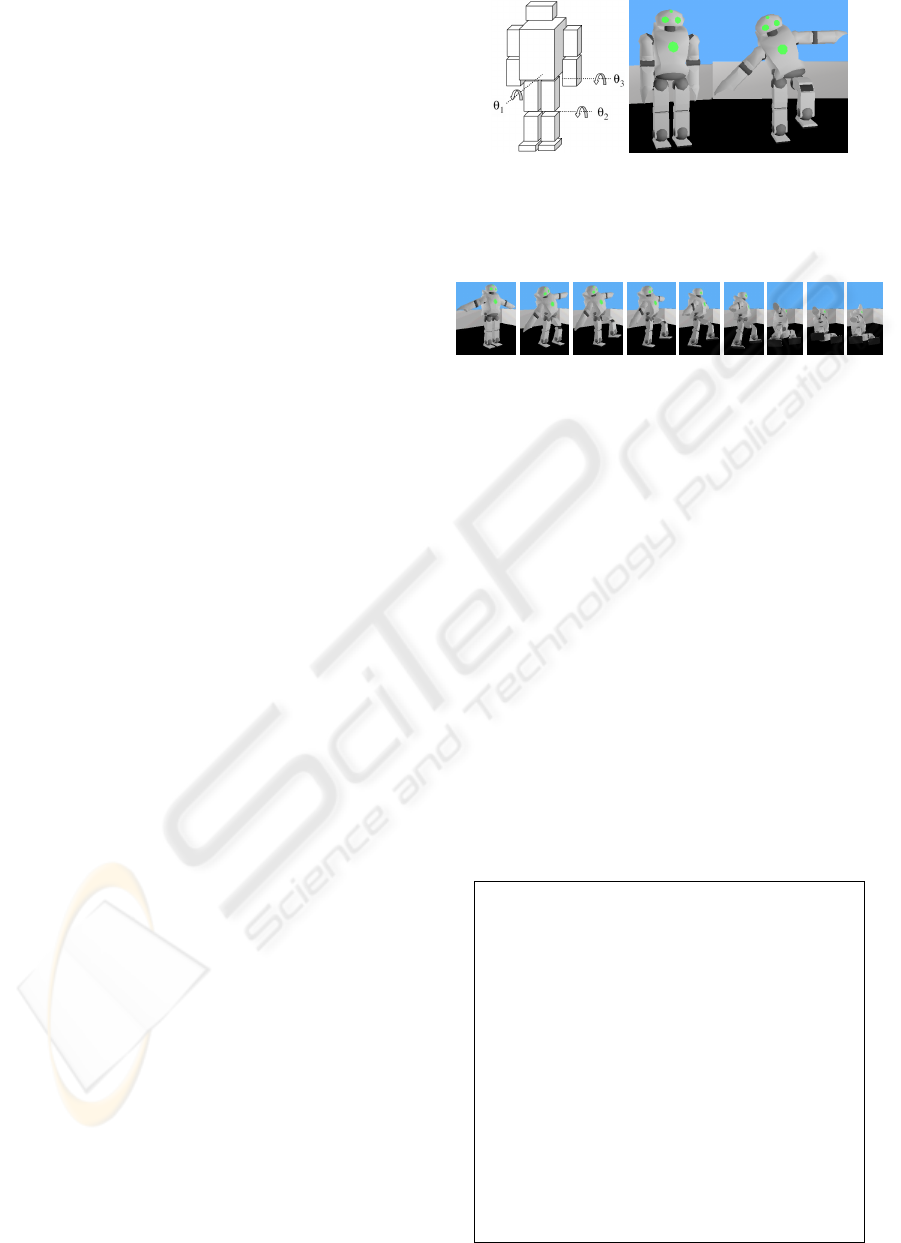
4.2 The One-Leg Equilibrium Task
The goal of the simulation experiment is to reach a
final configuration called ’one-leg equilibrium point’
starting from the passive stand up position. Three
joints are involved in this motion (see Figure 2(a).):
The longitudinal axis of the Back, the transversal axis
of the left hip and the left knee; their goal states,
i.e. angles in radians, are θ
∗
1
= 0.4, θ
∗
2
= 1.5 and
θ
∗
3
= 1.5 respectively, with final velocity
˙
θ
∗
= 0 for
all the joints. Both configurations, initial and final,
are shown in Figure 2(b). The goal configuration has
been designed to generate a slight inclination of the
back to the right side, changing the center of mass of
the body of the robot, thus, letting more weight sup-
ported on the right leg, and then allowing the left leg
to lift, by means of the blending of the hip and knee
articulations.
Figure 3 shows the simulation sequence of the mo-
tion of the robot using standard low level controllers.
The robot falls down when attempts to reach the goal
configuration due to the forces generated by the fric-
tion between the floor and its foot soles. The whole
body of the robot suffers a destabilization at the start
of the movement.
(a) (b)
Figure 2: Simulated Humanoid (a). Joints involved in the
motion. (b) Initial and goal configuration.
Figure 3: Direct Solution: Failure Demonstration.
4.3 The Learning Procedure
Table 1 shows the PGRL algorithm. A supervisor pro-
gram is in charge of the training; its EVALUATE sub-
routine delivers the set of values to be evaluated in
the robot controllers. It starts a controlled episode
from the initial configuration and intends to achieve
the goal states; every evaluation takes T = 12s, within
this time the cost function is measured and returned.
The supervisor repeats this operation until a conver-
gence criterium is matched or the number of iterations
is too large.
In this experiment the PID values are learned but not
calculated. The following is the discrete implementa-
Table 1: Weight perturbation PGRL Algorithm.
input
step size η ∈ [0, 1]
search size σ ≥ 0
max step ∆
max
∈ [0, 1]
initialize
W
0
← I ∈ R
3×3
(Identity Matrix)
α ← 0
J ← EVALUATE(W)
repeat
1. z ← N(0, σ)
3. J
z
← EVALUATE(W+z)
4. α ← [J
z
− J] · z
5. ∆W ← −ηα
6. ∆W ← min(∆W, ∆
max
)
7. W ← W + ∆W
8. J ←EVALUATE(W)
until convergence or number of iterations too large
return W, J
COLLABORATIVE CONTROL IN A HUMANOID DYNAMIC TASK
177
tion of the PID employed,
u
t
i
= K
P
· e
t
i
+ K
D
· (e
t
i
− e
t−1
i
) + K
I
·
t
∑
j=0
e
j
i
(9)
Where u
t
i
represents the control signal associated with
joint i at step time t, it depends on its corresponding
position error e
t
i
= θ
∗
i
− θ
t
i
. This controller must pro-
vide zero position error in a single joint motion, there-
fore its parameters are learned using as performance
criteria the following expression,
J
i
(V ) = −
T
∑
t=0
(θ
∗
i
− θ
t
i
)
2
+
T
∑
t=0
(
˙
θ
t
i
)
2
(10)
The PID is tested using a time step of ∆T = 32ms
during T = 12s. The algorithms constants used are
σ = 0.032 and η = 0.05. For the learning of the par-
ticular PID in charge of controlling the back, special
restrictions are implemented to the reward function,
penalizing those episodes where the robot falls down.
The penalization is proportional to the time the robot
stays on the ground.
The linear parameterized function selected for the
coordination layer is:
v
t
= W · u
t
(11)
where v
t
∈ ℜ
3
are the actual final velocities; u
t
∈ ℜ
3
the outputs of the PIDs; and W ∈ ℜ
3×3
is the transfor-
mation that contains the parameters to be found (W
i j
).
The algorithm starts with a diagonal matrix as co-
ordination controller, i.e. W
0
= I, meaning that the
first collaborative control function attempted is that in
which just the original PID controllers act. The non-
diagonal values of K deliver coordination. Same algo-
rithms constants and time step are used in this stage
of the LCC implementation.
5 RESULTS
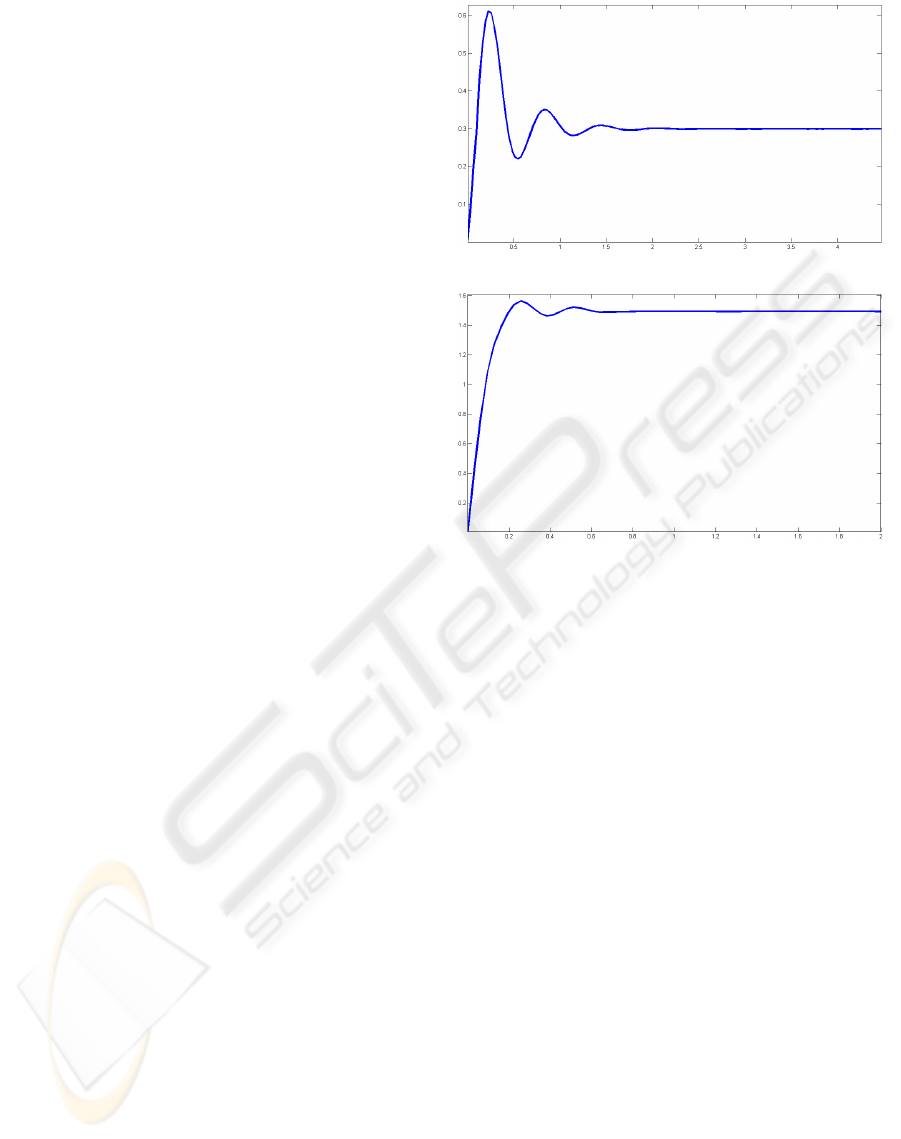
5.1 PID Controller
Several local minima are found. Figure 4(a) shows the
output of the back joint using one of the PID solutions
found. It presents big overshoot, but no stationary er-
ror to a set point of θ
∗
= 0.3, and mainly: The robot
learns how ’not to fall’.
The behavior of the Back joint is equivalent with an
inverted pendulum system with a big mass being ma-
nipulated (robot torso). For this joint, and for a better
controlled output, a more complex parameterized pol-
icy would be needed. On the other hand, Figure 4(b)
presents the output of the hip joint. It is evident that
(a)
(b)
Figure 4: (a) Back-Joint position output (radians), using a
learned PID (set point=0.3rad), (b) Hip-Joint position out-
put (radians) using a learned PID (set point=1.5rad).
a better solution is achieved, this is because the train-
ing of this PID is done in a lay down position, with
no risk of falling, and the mass of the link being con-
trolled is widely insignificant compared with that in
the back-joint case.
Final values for the independent joints controllers
(Back, Hip and Knee) are :
PID
1
= [0.746946 0.109505 0.0761541]
PID
2
= [0.76541 0.0300045 0]
PID
3
= [0.182792 0.0114312 0.00324704]
5.2 Coordination Layer
After several iterations, the best solution is found; a
sequence of the humanoid learned motion is depicted
in Figure 5. The associate coordination controller is
the following:
W =
0.6612900 −0.3643360 −0.1936260
−0.0497653 1.0266600 −0.0684569
0.0285586 0.1469820 0.9642390
Note how the non-diagonal parameters have grown,
allowing the coordination. This characteristic has
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
178

Figure 5: Simulated Humanoid One-Leg Equilibrium task.
(a)
(b)
Figure 6: (a) Reward Evolution J(W ) of the best learned so-
lution (last 20 tirals); (b) Back-joint position, before (dotted
line) and after the coordination learning.
been previously pointed out in (Rosenstein and Barto,
2001), but here in an unstable 3D system task.
For this particular solution, the evolution of the
reward is presented in Figure 6(a). Once the robot
learns how ‘not to fall’ the convergence rate increases
and the final results get to lower values.
It is important to mention that the robot presents
some absolute displacement, tending to go back-
wards. A better designed reward function is needed
to avoid absolute displacements, but a good solution
is harder to find in this scenario. Finally, it is impor-
tant to emphasize the change in the behavior of the
back joint after the second layer phase. It seems like
the system learns that the overshoot must be shorter in
time in order to be able to lift the leg with out falling
down. Figure 6(b). shows the output of the back joint
before and after the second layer of learning.
6 CONCLUSIONS
The LLC scheme proposes to use the dynamic inter-
action of the robots articulations as a trajectory gen-
erator, without the use of a trajectory planner. Ex-
ploiting dynamics gives the robot the ability to ex-
plore motion interactions that result in optimized be-
haviors: Learning at the level of dynamics to succeed
in coordination.
The presented solution overcomes the model de-
pendency pointed above; by the presentation of a sys-
tematic control scheme the ideas of (Rosenstein and
Barto, 2001) are extended. Here, the low level con-
trollers are found using learning techniques and the
formulation of a control architecture allows the im-
plementation of different parameterized policies.
The interaction between Machine Learning, Con-
trol Systems and Robotics creates an alternative for
the generation of artificial systems that consistently
demonstrate some level of cognitive performance.
Currently, highly dynamic motions in humanoids
are widely unexplored. The capability of this robots
will be extended if motions that compromise the
whole-body dynamic are explored. The LCC is tested
within a simulated humanoid and succeed in the per-
formance of a very fast motion, one in which the
whole-body equilibrium is at risk.
Coordination is possible thanks to the sharing of
information.
ACKNOWLEDGEMENTS
This work has been partly supported by the Spanish
MEC project ADA (DPI2006-15630-C02-01). Au-
thors would like to thank Olivier Michel and Ricardo
Tellez for their support and big help.
REFERENCES
Daley, S. and Liu, G. (1999). Optimal pid tuning using
direct search algorithms. Computing and Control En-
gineering Journal, 10(2):251–56.
Fujita, M. and Kitano, H. (1998). Development of an au-
tonomous quadruped robot for robot entertainment.
Autonomous Robots, 5(1):7–18.
Hirai, K., Hirose, M., Haikawa, Y., and Takenaka, T. (1998).
The development of honda humanoid robot. In Pro-
ceedings of the IEEE International Conference on
Robotics and Automation, ICRA.
Jabri, M. and Flower, B. (1992). Weight perturbation: An
optimal architecture and learning technique for analog
VLSI feedforward and recurrent multilayer networks.
COLLABORATIVE CONTROL IN A HUMANOID DYNAMIC TASK
179

IEEE Transactions on Neural Networks, 3(1):154–
157.
Kaneko, K., Kanehiro, F., Kajita, S., Hirukawa, H.,
Kawasaki, T., Hirata, M., Akachi, K., and Isozumi,
T. (2004). Humanoid robot hrp-2. In Proceedings of
the IEEE International Conference on Robotics and
Automation, ICRA.
Koszalka, L., Rudek, R., and Pozniak-Koszalka, I. (2006).
An idea for using reinforcement learning in adaptive
control systems. In Proceedings of the IEEE Int Con-
ference on Networking, Systems and Mobile Com-
munications and Learning Technologies, Kerkrade,
Netherlands.
Kuroki, Y., Blank, B., Mikami, T., Mayeux, P., Miyamoto,
A., Playter, R., Nagasaya, K., Raibert, M., Nagano,
M., and Yamaguchi, J. (2003). A motion creating sys-
tem for a small biped entretainment robot. In Proceed-
ings of the IEEE International Conference on Intelli-
gent Robots and Systems, IROS.
Michel, O. (2004). Webots: Professional mobile robot
simulation. Journal of Advanced Robotics Systems,
1(1):39–42.
Rosenstein, M. T. (2003). Learning to exploit dynamics for
robot motor coordination. PhD thesis, University of
Massachusetts, Amherst.
Rosenstein, M. T. and Barto, A. G. (2001). Robot
weightlifting by direct policy search. In Proceedings
of the IEEE International Conference on Artificial In-
telligence, IJCAI, pages 839–846.
Sutton, R., McAllester, D., Singh, S., and Mansour, Y.
(2000). Policy gradient methods for reinforcement
learning with function approximation. Advances in
Neural Information Processing Systems, 12:1057–
1063.
Vukobratovic, M. and Stepanenko, J. (1972). On the stabil-
ity of anthropomorphic systems. Mathematical Bio-
sciences, 15:1–37.
Webots. http://www.cyberbotics.com. Commercial Mobile
Robot Simulation Software.
Williams, R. J. (1992). Simple statistical gradient-following
algorithms for connectionist reinforcement learning.
Machine Learning, 8:229–256.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
180
