
A STATE ESTIMATOR FOR NONLINEAR STOCHASTIC SYSTEMS
BASED ON DIRAC MIXTURE APPROXIMATIONS
Oliver C. Schrempf and Uwe D. Hanebeck
Intelligent Sensor-Actuator-Systems Laboratory, Universit
¨
at Karlsruhe (TH), Germany
Keywords:
Nonlinear Dynamic Systems, Stochastic Filter, Dirac Mixture.
Abstract:
This paper presents a filter approach for estimating the state o f nonlinear dynamic systems based on recursive
approximation of posterior densities by means of Dirac mixture functions. The filter consists of a prediction
step and a filter step. The approximation approach is based on a systematic minimization of a distance measure
and is hence optimal and deterministic. In contrast to non-deterministic methods we are able to determine
the optimal number of components in the Dirac mixture. A further benefit of the proposed approach is the
consideration of measurements during the approximation process in order to avoid parameter degradation.
NOTATION
k time index
x
k
state variable
y
k
measurement variable
ˆy
k
actual measurement at time k
ˆx
k
point estimate at time k
˜
f
x
(x) probability density function of x
x
x
f
x
(x) approximation of
˜
f
x
(x)
f
p
(x
k+1
) predicted density function
f
e
(x
k
) filtered density function
f
L
(x
k
, ˆy
k
) Likelihood functon
δ(x) Dirac Delta function
H(x) Heaviside step function
G distance measure
η parameter vector
γ progression parameter
N (., m, σ) Gaussian density with mean m
and standard deviation σ
1 INTRODUCTION
In this paper, we present a novel stochastic filter for
nonlinear dynamic systems suffering from system as
well as measurement noise. The uncertainty in the
filter’s estimate caused by the noise is described by
means of probability density functions. The problem
that arises with the application of stochastic filters to
nonlinear systems is that the complexity of the den-
sity representation increases and the exact densities
cannot be calculated directly in general. Common
solutions to this problem in order to build practical
estimators can be devided into two classes. The ap-
proaches of the first class approximate or modify the
system and measurement functions and apply a fil-
ter. The idea of the second class is to approximate
the resulting density functions themselves in order to
calculate the filter steps in closed-form .
A common representative of the first class is the
extended Kalman filter (EKF). It is based on lineariza-
tion of the system and measurement functions and ap-
plying a standard Kalman filter to this modified sys-
tem. This approach is applicable to systems with only
negligible nonlinearities and additive noise, but fails
in more general cases.
Another approach is to approximate the system to-
gether with its noise as a probabilistic model (Huber
and Hanebeck, 2007). The application of adequate
representations of the model like Gaussian mixtures
with axis-aligned components (Huber et al., 2006),
allows for efficient implementation of the filter steps.
Filters approximating the density functions in-
stead of the system function can be divided into two
54
C. Schrempf O. and D. Hanebeck U. (2007).
A STATE ESTIMATOR FOR NONLINEAR STOCHASTIC SYSTEMS BASED ON DIRAC MIXTURE APPROXIMATIONS.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 54-61
DOI: 10.5220/0001629600540061
Copyright
c
SciTePress

main approaches found in the literature: i) sample-
based representations and ii) analytic density repre-
sentations.
Sample-based filters like the popular particle fil-
ter (Doucet et al., 2000)(Doucet et al., 2001) apply
Monte Carlo methods for obtaining a sample repre-
sentation. Since these sample are usually produced by
a random number generator, the resulting estimate is
not deterministic. Furthermore, Markov Chain Monte
Carlo Methods (MCMC) are iterative algorithms that
are unsuited for recursive estimation, hence, impor-
tance sampling like in (Geweke, 1989) is often ap-
plied. The problem of sample degradation is usually
tackled by bootstrap methods (Gordon, 1993).
Other methods describe the probability density
functions by means of their moments. A popular
approach is the so called Unscented Kalman filter
(UKF) (Julier and Uhlmann, 1997) that uses the first
moment and the second central moment for represent-
ing the densities. This allows for an efficient calcula-
tion of the update but fails in representing highly com-
plex densities arising from nonlinear systems. Fur-
thermore, the assumption of jointly Gaussian dis-
tributed states and measurements is made, which is
not valid in general.
An approach that represents the densities by
means of Gaussian mixture densities is the so called
Gaussian sum filter (Alspach and Sorenson, 1972).
The Gaussian mixture representation allows for ap-
proximating arbitrary density functions, but finding
the appropriate parameters is a tough problem. A
more recent approach is the Progressive Bayes filter
(Hanebeck et al., 2003) which uses a distance mea-
sure for approximating the true densities. The key
idea in this approach is to transform the approxima-
tion problem into an optimization problem. This is a
major motivation for the approximation applied in the
approach presented here.
The filter method we propose here follows the idea
of approximating the density functions instead of the
system itself, but the approximation is performed in
a systematic manner. The general idea is to approx-
imate the continuous density function by means of a
Dirac mixture function that minimizes a certain dis-
tance measure to the true density. The approxima-
tion process itself is described in (Schrempf et al.,
2006a)(Schrempf et al., 2006b) and will therefore
only be discussed briefly in this paper. We will focus
here on the complete filter consisting of approxima-
tion, prediction (Schrempf and Hanebeck, 2007) and
filter step.
Since we make use of a distance measure, we
are able to quantify the quality of our approximation.
Furthermore, it is possible to find an optimal num-
ber of components required for sufficient estimates.
Following this idea we will extend our optimization
method to a full estimation cycle by considering the
measurement as well.
The paper is organized as follows: We will give
a problem formulation in Section 2 followed by an
overview of the complete filter in Section 3. The
building blocks of the filter are described in Section 4
whereas Section 5 presents further optimization meth-
ods. Experimental results comparing the proposed
filter to state-of-the-art filters are given in Section 6
followed by conclusions in Section 7.
2 PROBLEM FORMULATION
We consider discrete-time nonlinear dynamic systems
according to
x
k+1
= a
k
(x
k
, u
k
, w
k
)
producing measurements according to the nonlinear
function
y
k
= h
k
(x
k
, v
k
) .
The state of the system that is not directly observable
in general is represented by x
k
. u
k
is a known input,
and y
k
is an observable output of the system. a
k
(·) is
a time-varying nonlinear mapping describing the sys-
tem’s dynamic behavior. w
k
represents both endoge-
nous and exogenous noise sources acting upon the
system and is described by means of a density func-
tion f
w
k
(w
k
). h
k
(·) maps the system state to an output
value which suffers from noise v
k
which is modeled
by means of a density function f
v
k
(v
k
).
Starting with an initial state x
0
, our goal is to
keep track of the system’s state over time while main-
taining a full continuous stochastic representation of
the uncertainty involved caused by the system and
measurement noise.
This corresponds to sequentially calculating the
state densities f
x
k
(x
k
), k = 1, .. . , N, by means of a
prediction and a filter step where the system and
measurement functions are applied.
Exact computation of these densities, however, is
not feasible, as the complexity of the density increases
in every step. In addition, the resulting densities
cannot be calculated in an analytic form in general.
The aim of this work is to provide a density rep-
resentation that approximates the true density, in or-
der to allow for closed-form calculation of the pre-
diction step while maintaining a predefined quality
of the approximation with respect to a given distance
measure.
A STATE ESTIMATOR FOR NONLINEAR STOCHASTIC SYSTEMS BASED ON DIRAC MIXTURE
APPROXIMATIONS
55

For reasons of brevity, we omit the input u
k
. We
further focus on additive noise, which results in the
system equation
x
k+1
= g
k
(x
k
) + w
k
and a measurement equation
y
k
= h
k
(x
k
) + v
k
.
In addition, the time index k is omitted in some cases
without notice.
3 FILTER OUTLINE
In this section, we will give a brief overview of the
recursive filtering scheme depicted as a block dia-
gram in Figure 1. The left part of the figure shows
the nonlinear system suffering from additive noise as
described in Sec. 2. The right part shows the estima-
tor. The input of the estimator is a measurement ˆy
k
coming from the system. The output of the estimator
is a probability density function f
e
(x
k
) from which a
point estimate ˆx
k
can be derived. The estimator itself
works recursively as can be seen from the loop in the
diagram. Each recursion consists of a prediction step,
an approximation step, and a filter step.
The prediction step receives a density f
e
(x
k
) from
the previous filter step. This density is an approxima-
tion represented by means of a Dirac mixture allow-
ing for an analytically exact solution of the Bayesian
prediction integral with respect to this approximation.
The prediction yields a continuous mixture density
representation (e.g. a Gaussian mixture)
˜
f
p
(x
k+1
).
Details are given in Sec. 4.2.
The continuous mixture density
˜
f
p
(x
k+1
) re-
sulting from the prediction step serves as input
to the approximation step. The density is sys-
tematically approximated by means of a Dirac
mixture f
p
(x
k+1
) minimizing a distance measure
G
˜
f
p
(x
k+1
), f
p
(x
k+1
)
as described in Sec. 4.1.
The approximated density f
p
(x
k+1
) is then fed to
the filter step, where it gets fused with the likelihood
function f
L
(x, ˆy). This step is described in detail in
Sec. 4.3.
4 FILTER COMPONENTS
4.1 Density Approximation
We will now introduce Dirac mixture functions and
explain how they can be interpreted as parametric
density functions. Subsequently, we briefly describe
the systematic approximation scheme.
4.1.1 Dirac Mixture Density Representation
Dirac mixtures are a sum of weighted Dirac delta
functions according to
f (x, η) =
L
∑
i=1
w
i
δ(x − x
i
) , (1)
where
η = [x
1
, x
2
, . . . , x
L
, w
1
, w
2
, . . . , w
L
]
T
is a parameter vector consisting of locations x
i
, i =
1, . . . , L and weighting coefficients w
i
, i = 1, . . . , L.
The Dirac delta function is an impulse representation
with the properties
δ(x) =
0, x 6= 0
not defined, x = 0
and
IR
δ(x) dx = 1 .
This results in the fundamental property
∞
−∞
f (x)δ(x − x
i
) dx = f (x
i
) .
A mixture of Dirac delta functions as given in (1) can
be used for representing arbitrary density functions
if the following requirements are considered. Since
the properties of a density function f (x) demand that
f (x) ≥ 0 and
IR
f (x) dx = 1, we have
w
i
≥ 0, i = 1, . . . , L
and
L
∑
i=1
w
i
= 1 .
Hence, we require 2L parameters with 2L − 1 degrees
of freedom.
A simplified density representation is given by
equally weighted Dirac mixtures, as
f (x, η) =
1
L
L
∑
i=1
δ(x − x
i
) ,
where only L parameters and L degrees of freedom
are used. This results in a simpler, less memory
consuming representation with less approximation
capabilities.
Dirac mixtures are a generic density representa-
tion useful for approximating complicated densities
arising in estimators for nonlinear dynamic systems.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
56

v
k
w
k
Figure 1: A block diagram of the recursive estimator. The estimator consists of a filter step, a prediction step and an
approximation step.
4.1.2 Approximation Approach
A systematic approximation of continuous density by
means of another density requires a distance measure
between the two densities
G
˜
f
p
(x
k+1
), f
p
(x
k+1
, η)
,
where
˜
f
p
(·) is an arbitrary continuous density func-
tion and f
p
(·, η) is a Dirac mixture density. The ap-
proximation problem can then be reformulated as an
optimization problem by finding a parameter vector η
that minimizes this distance measure.
Popular distance measures for comparing contin-
uous densities, measures are the Kullback–Leibler di-
vergence (Kullback and Leibler, 1951) or the integral
quadratic measure. For comparing a continuous den-
sity to a Dirac mixture, however, they are not very
useful, since the Dirac mixture is zero between the
Dirac pulses. Hence, instead of comparing the den-
sities directly, the corresponding (cumulative) distri-
bution functions are employed for that purpose. For
the rest of this subsection we will omit the time in-
dex k and the p index in order to keep the formulae
comprehensible.
The distribution function corresponding to the true
density
˜
f (x) is given by
˜
F(x) =
x
−∞
˜
f (t) dt .
The distribution function corresponding to the Dirac
mixture approximation can be written as
F(x, η) =
x
−∞
f (t, η) dt =
L
∑
i=1
w
i
H(x − x
i
) , (2)
where H(.) denotes the Heaviside function defined as
H(x) =
0, x < 0
1
2
, x = 0
1, x > 0
.
A suitable distance measure is given by the
weighted Cram
´
er–von Mises distance (Boos, 1981)
G(η) =
∞
−∞
r(x)
˜
F(x) − F(x, η)
2
dx , (3)
where r(x) is a nonnegative weighting function. r(x)
will later in the filter step be selected in such a way
that only those portions of the predicted probability
density function having support by the likelihood, are
approximated with high accuracy. This avoids to put
much approximation effort into irrelevant regions of
the state space.
The goal is now to find a parameter vector η that
minimizes (3) according to η = arg min
η
G(η). Un-
fortunately, it is not possible to solve this optimiza-
tion problem directly. Hence, we apply a progressive
method introduced in (Schrempf et al., 2006b). For
this approach, we introduce a so called progression
parameter γ into
˜
F(x) that goes from 0 . . . 1. The pur-
pose of this parameter is to find a very simple and
exact approximation of
˜
F(x, γ) for γ = 0. Further we
must guarantee that
˜
F(x, γ = 1) =
˜
F(x). By varying
γ from 0 to 1 we track the parameter vector η that
minimizes the distance measure.
In order to find the minimum of the distance mea-
sure, we have to find the root of the partial derivative
with respect to η according to
∂G(η, γ)
∂η
=
∂G(η,γ)
∂x
∂G(η,γ)
∂w
!
= 0 . (4)
Together with (2) and (3) this results in the system of
equations
˜
F(x
i
, γ) =
L
∑
j=1
w
j
H(x
i
− x
j
) ,
∞
x
i
r(x)
˜
F(x, γ) dx =
L
∑
j=1
w
j
∞
x
i
r(x)H(x − x
j
) dx ,
where i = 1, . . . , L.
In order to track the minimum of the distance mea-
sure we have to take the derivative of (4) with respect
to γ.
This results in a system of ordinary first order dif-
ferential equations that can be written in a vector–
matrix–form as
b = P
˙
η , (5)
A STATE ESTIMATOR FOR NONLINEAR STOCHASTIC SYSTEMS BASED ON DIRAC MIXTURE
APPROXIMATIONS
57

where
b =
∂
˜
F(x
1
,γ)
∂γ
.
.
.
∂
˜
F(x
L
,γ)
∂γ
∞
x
0
∂
˜
F(x,γ)
∂γ
dx
∞
x
1
∂
˜
F(x,γ)
∂γ
dx
.
.
.
∞
x
L
∂
˜
F(x,γ)
∂γ
dx
and
˙
η =
∂η
∂γ
=
˙x
1
, . . . , ˙x
L
, ˙w
0
, ˙w
1
, . . . , ˙w
L
T
.
˙
η denotes the derivative of η with respect to γ.
The P matrix as well as the derivations are given in
(Schrempf et al., 2006b). The approximation of
˜
f (x)
now boils down to solving (5).
4.2 Prediction Step
We now explain the Bayesian prediction step and
show how the approximation introduced in the last
subsection can be used for closed-form calculations.
Calculating the state densities f
p
(x
k+1
),
k = 1, . . . , N, is performed by evaluation the Bayesian
forward step, which is given by
f
p
(x
k+1
) =
∞
−∞
f (x
k+1
|x
k
) f
e
(x
k
)dx
k
, (6)
where the transition density f (x
k+1
|x
k
) of the con-
sidered nonlinear system with additive noise is given
by
f (x
k+1
|x
k
) = f
w
(x
k+1
− g(x
k
)) ,
where f
w
(·) is the density of the system noise (e.g.
Gaussian).
In general, the integral involved in (6) cannot be
solved analytically for arbitrary prior densities f
e
(x
k
)
For a given input point ¯x
k
, however, represented by
the Dirac delta function f
e
(x
k
) = δ(x
k
− ¯x
k
), (6) can
be solved in closed form according to
f
p
(x
k+1
) = f
w
(x
k+1
− g( ¯x
k
)) .
In the case of zero mean Gaussian system noise
with
f
w
(w) = N (w, 0, σ
w
) ,
this yields
f
p
(x
k+1
) = N (x
k+1
, g( ¯x
k
), σ
w
) ,
which is a Gaussian Density with a standard deviation
σ
w
.
For a given Dirac mixture prior f
e
(x
k
) according
to (1) given by
f
e
(x
k
) =
L
∑
i=1
w
(i)
k
δ(x
k
− x
(i)
k
) , (7)
the posterior according to (6) is a Gaussian mixture
given by
f
p
(x
k+1
) =
L
∑
i=1
w
(i)
k
N
x
k+1
, g(x
(i)
k
), σ
w
,
which is a closed-form solution.
Please note, that similar result can be derived for
non-additive and non-Gaussian noise.
4.3 Filter Step
The filter step consists of fusing the predicted den-
sity f
p
(x
k
) and the likelihood function f
L
(x
k
, ˆy
k
)
governed by the measurement ˆy
k
according to
f
e
(x
k
) = c · f
p
(x
k
)· f
L
(x
k
, ˆy
k
) , (8)
where c is a normalizing constant. The likelihood
function is given by
f
L
(x
k
, ˆy
k
) = f ( ˆy
k
|x
k
) .
For a nonlinear system with additive noise, the condi-
tional density for the measurement f (y
k
|x
k
) is given
by
f (y
k
|x
k
) = f
v
(y
k
− h(x
k
)) ,
where f
v
(·) is the density of the measurement noise
and h(x
k
) is the nonlinear measurement function. In
the case of zero-mean Gaussian measurement noise
the likelihood function can be written as
f
L
(x
k
, ˆy
k
) = N ( ˆy
k
, h(x
k
), σ
v
) .
We would like to emphasize, that in the general
nonlinear case this likelihood function is no proper
density function. Furthermore, a parametric represen-
tation of this function is not available in general. This
is the reason, why the update equation (8) cannot be
solved analytically, even if the prediction is given in a
parametric representation.
Our solution to this problem is driven by the same
observation made for solving the prediction step in
Sec. 4.2. The likelihood can be evaluated at certain
points ¯x
k
, which yields constant values.
In order to calculate the product of a likelihood
and a prediction, where the latter is already given as a
Dirac mixture, it comes quite naturally to use the x
(i)
k
points of the Diracs to evaluate the likelihood. The
obtained values of f
L
(·) can then be used to reweight
the predicted density according to
f
e
(x
k
) =
L
∑
i=1
¯w
(i)
k
δ(x
k
− x
(i)
k
)
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
58

with
¯w
(i)
k
= c ·w
(i)
k
· f
v
( ˆy
k
− h(x
(i)
k
)) ,
where w
(i)
k
is the i’th weight and x
(i)
k
is the i’th po-
sition of the approximated prediction f
p
(x
k
). The
normalization constant can be calculated as
c =
L
∑
i=1
w
(i)
k
· f
v
( ˆy
k
− h(x
(i)
k
))
!
−1
.
Naive approximation of the predicted density in a
fixed interval may lead to many small weights, since
not all regions of the state space supported by the pre-
diction are as well supported by the likelihood. This
phenomenon can be described as parameter degrada-
tion. To circumvent this problem, we make use of
the weighting function r(x) in (3). Details on this
approach are presented in the next section.
5 OPTIMAL NUMBER OF
PARAMETERS
In this section, we describe how to tackle the prob-
lem of parameter degradation that is inherent to all
filter approaches considering only discrete points of
the density. We further describe a method for finding
an optimal number of components for the approxima-
tion taking into account the prediction and filter steps
as well.
To fight the problem of parameter degradation de-
scribed in the previous section we make use of the
fact, that although the likelihood function is not a den-
sity it decreases to zero for x → ±∞ in many cases.
An example for this are polynomial systems suffer-
ing from additive noise. Therefore, we can define
an area of support for which the likelihood is higher
than a certain value. This area of support is an in-
terval and can be represented by the weighting func-
tion r(x) in (3). It guarantees, that all components of
the approximation are located in this interval and are
therefor not reweighed to zero in the filter step. In
other words, the complete mass of the approximation
function accounts for the main area of interest.
In (Schrempf and Hanebeck, 2007), we intro-
duced an algorithm for finding the optimal number
of components required for the approximation with
respect to the following prediction step. We will
now extend this algorithm in order to account for the
preceding filter step as well.
At the beginning of Algorithm 1 in line 6, an ini-
tial approximation with a very large number of com-
ponents is generated and passed through the predic-
tion step, resulting in a continuous density representa-
tion with parameter vector κ
t
. Due to the high number
Algorithm 1 Optimal number of components w.r.t.
the filter step and posterior density.
1: Select max. Error Threshold G
max
2: Select initial number of Components L = L
0
3: Select search step ∆L
4: f
L
(x) = likelihood( ˆy)
5: r(x) = support( f
L
(x))
6: κ
t
= predict(filter(approx(L
large
,r(x)), ˆy))
7: while G > Gmax do
8: κ = predict(filter(approx(L,r(x)), ˆy))
9: G = G(κ
t
, κ)
10: L = L + ∆L
11: end while
12: L
l
= L − 2∆L
13: L
u
= L − ∆L
14: while L
u
− L
l
> 1 do
15: L
t
= L
l
+ b
L
u
−L
l
2
c
16: κ = predict(filter(approx(L
l
,r(x)), ˆy))
17: G = G(κ
t
, κ)
18: if G > G
max
then
19: L
l
= L
t
20: else
21: L
u
= L
t
22: end if
23: end while
of components we can assume this density to be very
close to the true density. An efficient procedure for
approximating arbitrary mixture densities with Dirac
mixtures comprising a large number of components is
given in (Schrempf and Hanebeck, 2007).
In each search step of the algorithm, the distance
measure of the approximated density at hand to the
density defined by κ
t
is calculated. In this way the
smallest number of components for a prespecified
error can be found.
6 EXPERIMENTAL RESULTS
In order to compare the performance of our filter to
other state-of-the-art filters, we have simulated a non-
linear dynamic system according to the left part of
Figure 1. We apply the filter to a strongly nonlinear
cubic system and measurement function motivated by
the cubic sensor problem introduced in (Bucy, 1969).
The simulated system function is
g(x
k
) = 2x
k
− 0.5x
3
k
+ w
and the additive noise is Gaussian with σ
w
= 0.2
standard deviation. The measurement function is
h(x
k
) = x
k
− 0.5x
3
k
+ v
A STATE ESTIMATOR FOR NONLINEAR STOCHASTIC SYSTEMS BASED ON DIRAC MIXTURE
APPROXIMATIONS
59
−2 0 2
0
0.2
0.4
0.6
0.8
x
f
p
(x)
k=1 L=17
−2 0 2
0
0.2
0.4
0.6
0.8
x
f
p
(x)
k=2 L=12
−2 0 2
0
0.2
0.4
0.6
0.8
x
f
p
(x)
k=3 L=29
−2 0 2
0
0.5
1
x
f
e
(x)
k=1 L=17
−2 0 2
0
0.5
1
x
f
e
(x)
k=2 L=12
−2 0 2
0
0.5
1
x
f
e
(x)
k=3 L=29
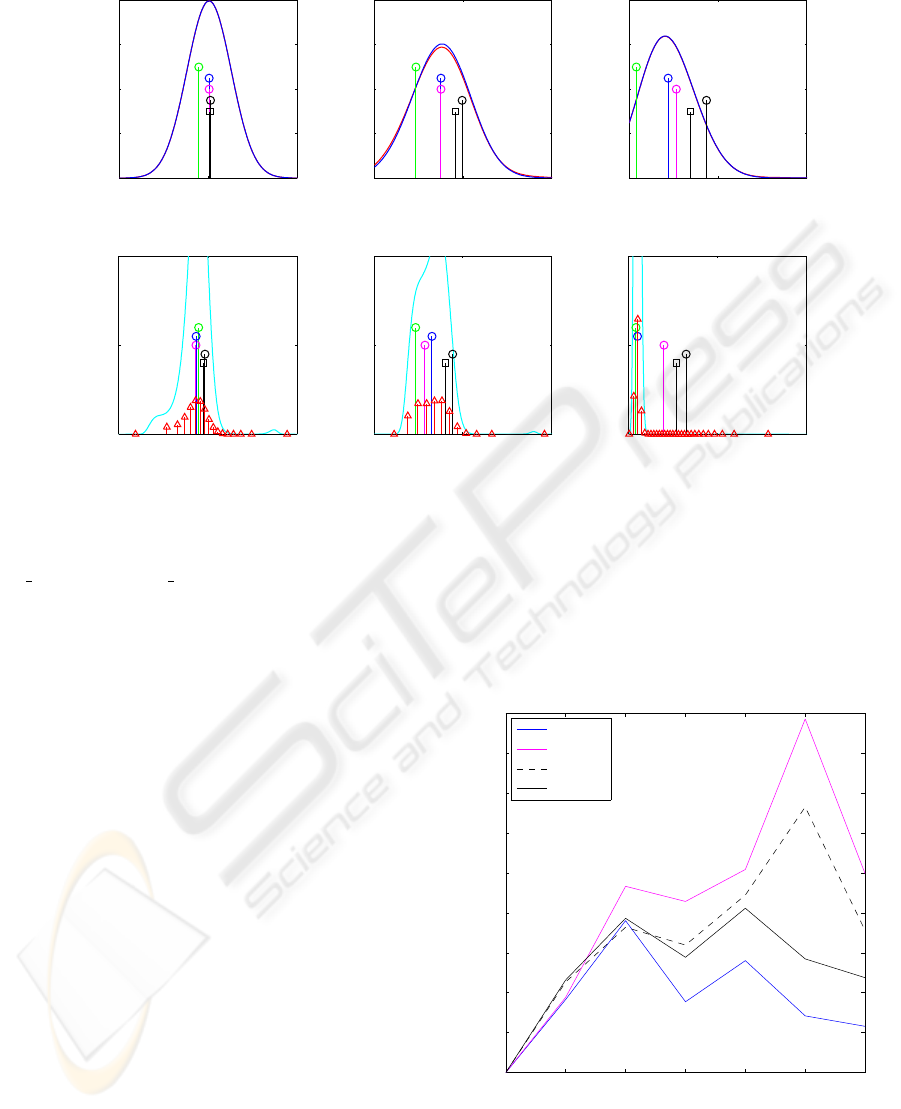
Figure 2: The recursive filter for T = 3 steps. k indicates the step number and L the number of components for the Dirac
mixture. The upper row shows the prediction steps, the lower row shows the filter steps. Upper row: The blue is the
continuous density predicted by the DM filter, the red line underneath is the true density. The green marker depicts the true
(simulated) system state, the other markers depict the predicted point estimates of the following filters: blue=DM, pink=UKF,
black circle=PF20, black square=PF1000. Lower row: The cyan line shows the likelihood. The colors of the point estimates
are similar to the upper line.
with additive Gaussian noise and σ
v
= 0.5.
The generated measurements are used as input to
our filter as well as to an unscented Kalman filter and
a particle filter. The particle filter is applied in a vari-
ant with 20 particles and a variant with 1000 particles
in order to compare the performance.
In a first run of the experiment we show T = 3
steps in Figure 2. The upper row shows the predic-
tion steps, the lower row shows the corresponding fil-
ter steps. The continuous prediction f
p
(x
k+1
) of the
Dirac mixture (DM) filter is depicted by the dark blue
line. The red line underneath shows the true predic-
tion computed numerically as a reference. The cyan
plot in the lower line shows the likelihood given by
the current measurement and the red arrows depict the
Dirac mixture after the filter step.
Both rows also show the point estimates of the
various applied filters in the current step. The green
marker indicates the true (simulated) state, whereas
blue stands for the Dirac mixture point estimate. Pink
is the UKF estimate an black are the particle filter es-
timates. The particle filter indicated by the circle uses
20 particles, the one indicated by the square uses 1000
particles.
We simulated the system a further 10 times for
T = 7s in order to calculate the root means square
error e
rms
of the 4 filters. The results are shown in
Figure 3. The plot shows that the point estimates of
1 2 3 4 5 6 7
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
k
e
rms
DM
UKF
PF20
PF1000
Figure 3: Root mean square error f or 10 runs and T = 7
steps.
the Dirac mixture filter are much closer to the true
state than the point estimates of the other filters.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
60

7 CONCLUSION
In this paper, we presented a complete Dirac mixture
filter that is based on the approximation of the poste-
rior density. The filter makes use of the properties of
the Dirac mixture approximation wherever they are
required, but does not deny the continuous charac-
ter of the true density. This can especially be seen
after each prediction step, where the full continuous
density representation is used.
The new approach is natural, mathematically rig-
orous, and based on an efficient algorithms (Schrempf
et al., 2006a)(Schrempf et al., 2006b) for the op-
timal approximation of arbitrary densities by Dirac
mixtures with respect to a given distance.
Compared to a particle filter, the proposed method
has several advantages. First, the Dirac components
are systematically placed in order to minimize a given
distance measure, which is selected in such a way that
the future evolution of approximate densities is al-
ways close to the true density while also considering
the actual measurements. As a result, very few sam-
ples are sufficient for achieving an excellent estima-
tion quality. Second, the optimization does not only
include the parameters of the Dirac mixture approxi-
mation, i.e., weights and locations, but also the num-
ber of components. As a result, the number of compo-
nents is automatically adjusted according to the com-
plexity of the underlying true distribution and the sup-
port area of a given likelihood. Third, as the approxi-
mation is fully deterministic, it guarantees repeatable
results.
Compared to the Unscented Kalman Filter, the
Dirac mixture filter has the advantage, that it is not
restricted to first and second order moments. Hence,
multi-modal densities, which cannot be described suf-
ficiently by using only the first two moments, can
be treated very efficiently. Such densties occur quite
often in strongly nonlinear systems. Furthermore,
no assumptions on the joint distribution of state and
measurement have to be made.
REFERENCES
Alspach, D. L. and Sorenson, H. W. (1972). Nonlinear
Bayesian Estimation Using Gaussian Sum Approxi-
mation. IEEE Transactions on Automatic Control,
AC–17(4):439–448.
Boos, D. D. (1981). Minimum Distance Estimators for Lo-
cation and Goodness of Fit. Journal of the American
Statistical association, 76(375):663–670.
Bucy, R. S. (1969). Bayes Theorem and Digital Realiza-
tions for Non-Linear Filters. Journal of Astronautical
Sciences, 17:80–94.
Doucet, A., Freitas, N. D., and Gordon, N. (2001). Se-
quential Monte Carlo Methods in Practice. Springer-
Verlag, New York.
Doucet, A., Godsill, S., and Andrieu, C. (2000). On Se-
quential Monte Carlo Sampling Methods for Bayesian
Filtering. Statistics and Computing, 10(3):197–208.
Geweke, J. (1989). Bayesian Inference in Econometric
Models using Monte Carlo Integration. Econometrica,
24:1317–1399.
Gordon, N. (1993). Bayesian Methods for Tracking. PhD
thesis, University of London.
Hanebeck, U. D., Briechle, K., and Rauh, A. (2003). Pro-
gressive Bayes: A New Framework for Nonlinear
State Estimation. In Proceedings of SPIE, volume
5099, pages 256–267, Orlando, Florida. AeroSense
Symposium.
Huber, M., Brunn, D., and Hanebeck, U. D. (2006). Closed-
Form Prediction of Nonlinear Dynamic Systems by
Means of Gaussian Mixture Approximation of the
Transition Density. In International Conference on
Multisensor Fusion and Integration for Intelligent
Systems (MFI 2006), Heidelberg, Deutschland, pages
98–103.
Huber, M. F. and Hanebeck, U. D. (2007). Hybrid Tran-
sition Density Approximation for Efficient Recursive
Prediction of Nonlinear Dynamic Systems. In In-
ternational Conference on Information Processing in
Sensor Networks (IPSN 2007), Cambridge, USA.
Julier, S. and Uhlmann, J. (1997). A New Extension of
the Kalman Filter to Nonlinear Systems. In Proceed-
ings of SPIE AeroSense, 11th International Sympo-
sium on Aerospace/Defense Sensing, Simulation, and
Controls, Orlando, FL.
Kullback, S. and Leibler, R. A. (1951). On Information
and Sufficiency. Annals of Mathematical Statistics,
22(2):79–86.
Schrempf, O. C., Brunn, D., and Hanebeck, U. D. (2006a).
Density Approximation Based on Dirac Mixtures with
Regard to Nonlinear Estimation and Filtering. In Pro-
ceedings of the 45th IEEE Conference on Decision
and Control (CDC’06), San Diego, California, USA.
Schrempf, O. C., Brunn, D., and Hanebeck, U. D. (2006b).
Dirac Mixture Density Approximation Based on Min-
imization of the Weighted Cram
´
er–von Mises Dis-
tance. In Proceedings of the International Confer-
ence on Multisensor Fusion and Integration for In-
telligent Systems (MFI 2006), Heidelberg, Germany,
pages 512–517.
Schrempf, O. C. and Hanebeck, U. D. (2007). Recursive
Prediction of Stochastic Nonlinear Systems Based on
Dirac Mixture Approximations. In Proceedings of the
American Control Conference (ACC ’07), New York
City, USA.
A STATE ESTIMATOR FOR NONLINEAR STOCHASTIC SYSTEMS BASED ON DIRAC MIXTURE
APPROXIMATIONS
61
