
AUTOMATIC ESTIMATION OF PARAMETERS FOR THE
HIERARCHICAL REDUCTION OF RULES OF COMPLEX
FUZZY CONTROLLERS
Yulia Ledeneva
Instituto Politecnico Nacional, Center of Investigation in Computing, Unidad Adolfo López Mateos,D.F., México
Carlos A. Reyes-García, Alejandro Díaz-Méndez
Instituto Nacional de Astrofísica, Óptica y Electrónica, Luis Enrique Erro, Puebla, México
Keywords: Fuzzy control, rule base reduction, hierarchical method, genetic algorithm.
Abstract: The application of fuzzy control to large-scale complex systems is not a trivial task. For such systems the
number of the fuzzy IF-THEN rules exponentially explodes. If we have m linguistic properties for each of n
variables, we will have m
n
rules combinations of input values. Large-scale systems require special
approaches for modelling and control. In our work the system’s hierarchical structure is studied in an
attempt to reduce the size of the inference engine for large-scale systems. This method reduces the number
of rules considerably. But, in order to do so, the adequate parameters should be estimated, which, in the
traditional way, depends on the experience and knowledge of a skilled operator. In this work, we are
proposing a method to automatically estimate the corresponding parameters for the hierarchical rule base
reduction method to be applied to fuzzy control complex systems. In our approach, the parameters of the
hierarchical structure are found through the use of genetic algorithms. The implementation process, the
simulation experiments and some results are presented.
1 INTRODUCTION
Since the first fuzzy controller was presented by
Mamdani in 1974, the different studies devoted to
the theory of fuzzy control have shown that the area
of development of fuzzy control algorithms has been
the most active area of research in the field of fuzzy
logic in the last years. From the decade of the 80´s,
fuzzy logic has performed a vital function in the
advance of practical and simple solutions for a great
diversity of applications in engineering and science.
Some fuzzy control applications to industrial
pr
ocesses have produced results superior to its
equivalent obtained by classical control systems.
The domain of these applications has experienced a
serious limitation when expanding it to more
complex systems, because a complete theory to
determine the performance of the systems when
there is a change in its parameters or variables does
not yet exist.
When some of these applications are designed
fo
r more complex systems, the number of fuzzy
rules controlling the process is exponentially
increased with the number of variables related to the
system. For example, if there are n variables and m
possible linguistic values for each variable, m
n
fuzzy
rules would be needed to construct a complete fuzzy
controller. As n grows, the rule base quickly
overloads the memory of any computing device,
causing difficulties in the implementation and
application of the fuzzy controller.
A hierarchical structure is studied in an attempt
to reduce the size of the infe
rence engine for large-
scale systems. This structure reduces considerably
the number of rules. However, the adequate
parameters should be estimated. In traditional
techniques much reliance has to be put on the
experience of the system designer in order to find a
good set of parameters (Jamshidi M., 1997).
Genetic algorithms (GA) are an appropriate
technique to
find parameters in a large search space.
They have shown efficient and reliable results in
solving optimization problems. For these reasons, in
this work we estimate the parameters needed for the
rule base reduction method by means of GAs.
The paper is organized as follows. Section 2
summ
arizes the principles of rule base reduction
methods. In Section 3, the hierarchical structure is
398
Ledeneva Y., A. Reyes-García C. and Díaz-Méndez A. (2007).
AUTOMATIC ESTIMATION OF PARAMETERS FOR THE HIERARCHICAL REDUCTION OF RULES OF COMPLEX FUZZY CONTROLLERS.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 398-401
DOI: 10.5220/0001630603980401
Copyright
c
SciTePress
described. Section 4 proposes the GA which allows
us to automatically find the parameters for the
hierarchical structure in order to improve the
complex fuzzy control system performance. The
results are presented in Section 5.
2 RULE BASE REDUCTION
METHODS
The size of the rule base of complex fuzzy control
systems grows exponentially with the number of
input variables. Due to that fact, the reduction of the
rule base is a very important issue for the design of
this kind of controllers. Several rule base reduction
methods have been developed to reduce the rule
base size. For instance, fuzzy clustering is
considered to be one of the important techniques for
automatic generation of fuzzy rules from numerical
examples (Bezdek, 1974). However, for control
applications, often there is not enough data for a
designer to extract a complete rule base for the
controller.
Anwer (Anwer, 2005) proposed a technique for
generation and minimization of the number of such
rules in case of limited data sets availability. Initial
rules for each data pairs are generated and
conflicting rules are merged on the basis of their
degree of soundness. This technique can be used as
an alternative to develop a model when available
data may not be sufficient to train the model.
A neuro-fuzzy system (Ajith, 2001; Kasabov,
1998; Chia-Feng, 1998; Jang, 1993; Kim, 1999)
is a
fuzzy system that uses a learning algorithm derived
from, or inspired by, neural network theory to
determine its parameters (fuzzy sets and fuzzy rules)
by processing data samples.
Modern neuro-fuzzy
systems are usually represented as special multilayer
feedforward neural networks (for example, models
like ANFIS (Jang, 1993), HyFis (Kim, 1999), etc.).
A disadvantage of these approaches is that the
determination of the number of processing nodes,
the number of layers, and the interconnections
among these nodes and layers are still an art and
lack systematic procedures.
Jamshidi (Jamshidi M., 1997) proposed to use
sensory fusion to reduce a rule base size. Sensor
fusion combines several inputs into one single input.
The rule base size is reduced since the number of
inputs is reduced. Also, Jamshidi proposed to use the
combination of hierarchical and sensory fusion
methods. The disadvantage of the design of
hierarchical and sensory fused fuzzy controllers is
that much reliance has to be put on the experience of
the system designer to establish the needed
parameters. To solve this problem, we automatically
estimate the parameters for the hierarchical method
using GAs.
3 HIERARCHICAL METHOD
When a fuzzy controller is designed for a complex
system, often several measurable output and
actuating input variables are involved. In addition,
each variable is represented by a finite number m of
linguistic labels. This indicates that the total number
of rules is equal to m
n
, where n is the number of
system variables. As an example, consider n = 4 and
m = 5 than the total number of fuzzy rules will be k
= m
n
= 5
4
= 625. If there were five variables, then
we would have k = 3125. From the above simple
example, it is clear that the application of fuzzy
control to any system of significant size would result
in a dimensionality explosion.
In the proposed hierarchical fuzzy control
structure by Jamshidi (Jamshidi M., 1997), the first-
level rules are those related to the most important
variables and are gathered to form the first-level
hierarchy. The second most important variables,
along with the outputs of the first-level, are chosen
as inputs to the second-level hierarchy, and so on.
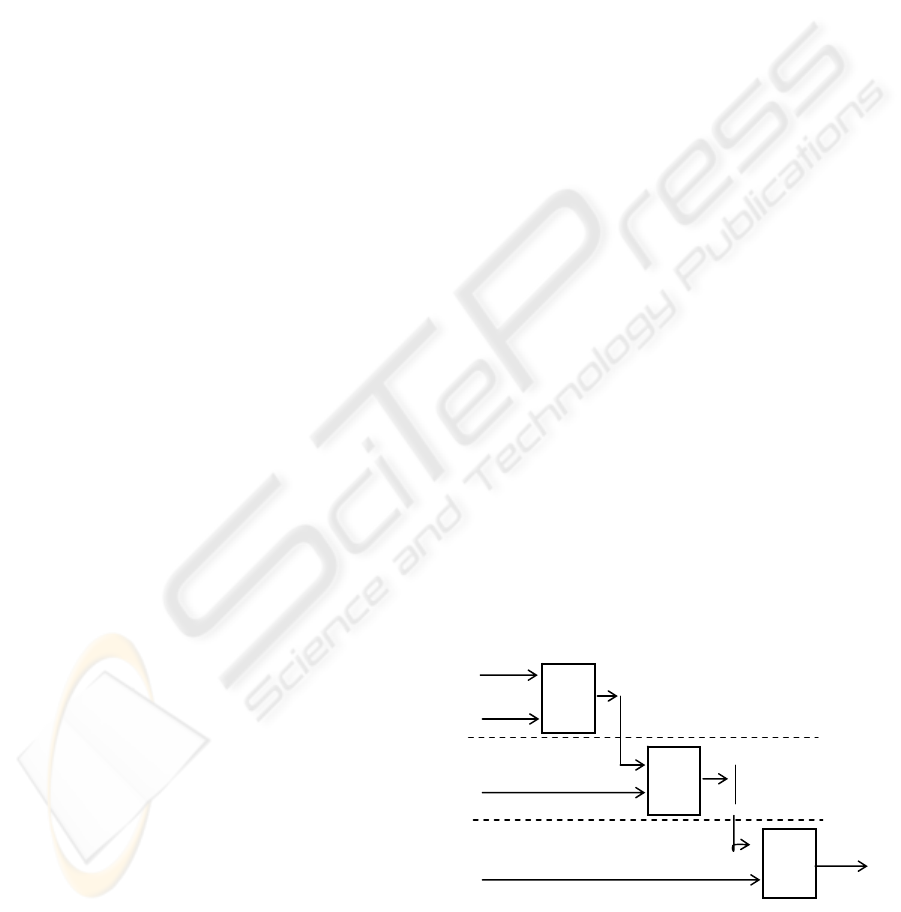
Figure 1 shows this hierarchical rule structure. The
first and the i-th rule of the hierarchically
categorized sets are given by
IF y
1
is
A
1i
and … and y
n
is
A
ni
THEN u
1
is BB
1
where i,j = 1, …,n; y
i
are the system’s output
variables, u
i
are the system’s control variables, A
ij
and B
B
i
are linguistic labels; and
n
∑
−
=
≤=
1
1
i
j
ji
nnN
j
is the number of j-th level system variables used
as inputs.
Figure 1: Schematic representation of hierarchical fuzzy
controller.
IF y
Ni+1
is A
Ni1
and … and y
Ni+nj
is A
Ninj
THEN u
i
is
B
B
i
,
Level
1
y
1
y
2
Set of rules 1
Set of rules 2
Set of rules L+1
Level
2
y
3
Level
2
u
u
L+1
u
y
L
u
1
{y
1
,y
2
}
AUTOMATIC ESTIMATION OF PARAMETERS FOR THE HIERARCHICAL REDUCTION OF RULES OF
COMPLEX FUZZY CONTROLLERS
399
The goal of this hierarchical structure is
minimize the number of fuzzy rules from
exponential to linear function. Such rule base
reduction implies that each system variable provides
one parameter to the hierarchical scheme. Currently,
the selection of such parameters is manually done
and becomes a fastidious and time-consuming
routine. In this work, we propose to find these
parameters using genetic algorithms.
4 GENETIC ESTIMATION
Nature has an ability to adapt and learn without
being told what to do. In other words, genetically
nature finds good chromosomes blindly. GAs do the
same. Two mechanisms link a GA to the problem it
is solving: encoding and evaluation. The GA uses a
measure of fitness of individual chromosomes to
carry out reproduction. As reproduction takes place,
the crossover operator exchanges parts of two single
chromosomes, and the mutation operator changes
the gene value in some randomly chosen location of
the chromosome.
The procedure of estimating the hierarchical
variables by GA is summarized as follows:
1. Determine the hierarchical structure and how
many parameters we must find.
2. Construct an initial population randomly.
3. Decode each string in the population
4. Evaluate the fitness value for each string.
5. Reproduce strings according to the fitness value
calculated in Step 4.
6. Go to 3 until the maximum number of iterations
is met.
To start with our algorithm we propose to encode
all parameters in one chromosome. For every
parameter we will dedicate 8 bits, so we can have
the parameters in the range of 2
8
possibilities. All
the parameters are positive and have one decimal
after the comma, then our range is in [0; 25.6]. The
search space can be changed depending on the
application. Using this simple encoding procedure
we can easily change the number of bits.
Then we evaluate the results using the fitness
function which is based on step response
specifications such as overshoot, rise time and
settling time. We define the fitness function so that it
measures how close each individual in the
population at time t (i.e., each hierarchical
parameter) is to meeting these specification.
Then, after knowing the design specification of
the objective function, and once we can obtain the
step response characteristics for each chromosome
in the population, the fitness function is calculated in
2 steps:
1. We ask if the result coming from the GA is in the
range of design specification of the objective
function. If it is, we go to the step 2. If it is not,
the fitness value of this chromosome is set to 0.
2. The fitness function is defined as
where os is overshoot, ts is settling time and tr is
rising time. The index coef is the specification of the
control problem for which we are looking the
hierarchical parameters. The index dis is the design
specification parameter. In order to minimize the
fitness function we divide 1/FF.
When the evaluation is done, we continue with
the reproduction stage. The new population is
obtained by applying the crossover operator in one
point with probability equal to 0.8 and the mutation
operator with probability equal to 0.1.
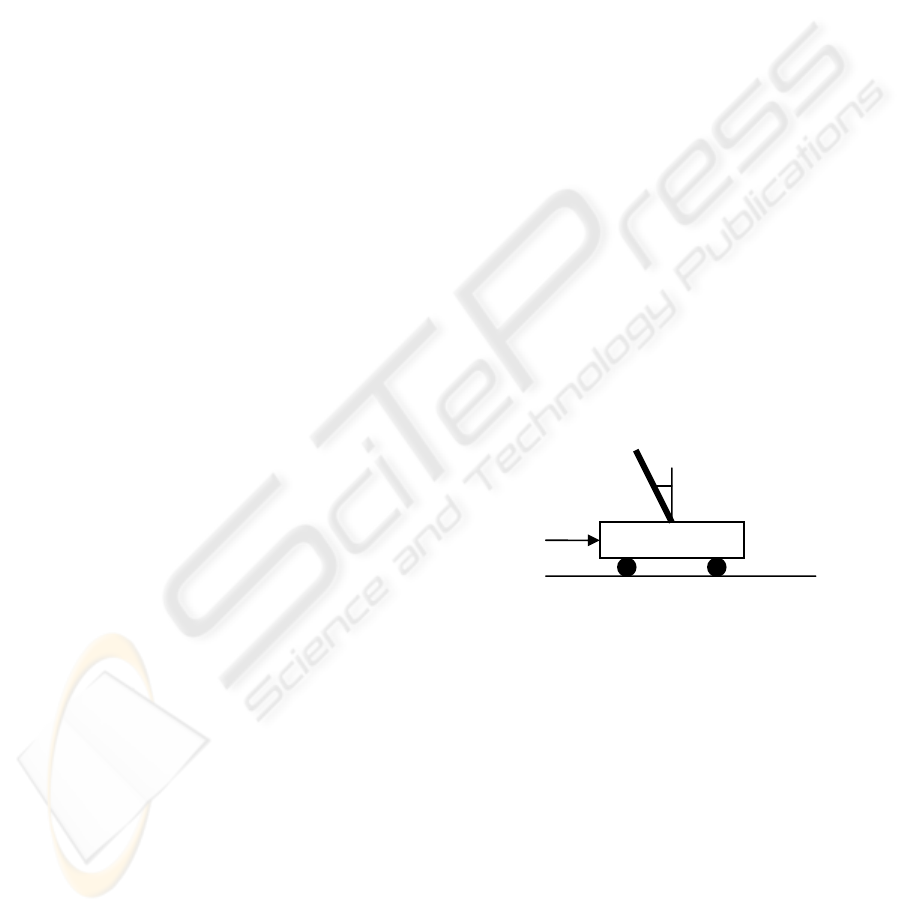
5 SIMULATION RESULTS
We applied the proposed method in order to find the
searching parameters. The proposed method was
tested in the inverted pendulum control problem
(Nguyen, 2003). This problem consists in the
application of a such power to a cart for not allowing
a pendulum stem to fall down and to carry the cart to
an objective position. The scheme in Figure 2 shows
the main components of the system.
Figure 2: Inverted pendulum.
The basic variables are: angular position of the
stem
θ
, angular velocity of the stem ∆
θ
, horizontal
position of the cart x, and the velocity of the cart ∆x.
The design specifications of the inverted pendulum
system are: objective position of the cart is 30 cm,
overshoot no more than 5%, and settling time no
more than 5 sec.
The simulation of the inverted pendulum is
performed in Simulink of Matlab starting from the
nonlinear equations (Nguyen, 2003). The fuzzy
controllers are implemented in the Matlab’s FIS
Editor. The input fuzzy sets are represented by
triangular membership functions (N, Z and P)
uniformly distributed in the universe of discourse [-
1, 1]. The output fuzzy sets are singletons uniformly
distributed in [-1, 1].
F
F = (os_coef – os_dis)
2
+ (ts_coef – ts_dis)
2
+
(tr
_
coe
f
–tr
_
dis)
2
Ө
M
x
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
400
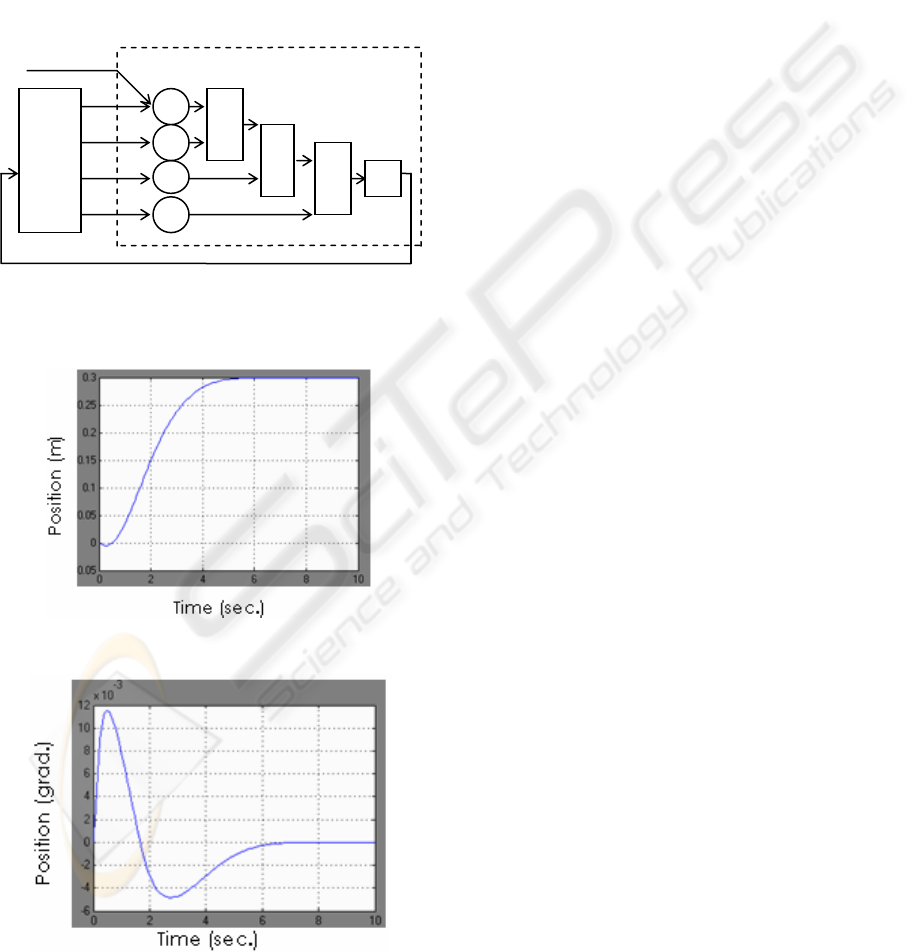
The fuzzy controller based on hierarchical
structure is composed of three fuzzy controllers (see
Figure 3). The total number of rules is of 9 for FC1
+ 5 for FC2 + 9 for FC3 = 23 rules.
For applying the reduction with the hierarchical
fuzzy controller method we obtained the following
parameters: a = 19.2, b = 6.4, c = 1.1, and d= 2.3.
With these parameters, the horizontal position of the
cart is stabilized in 4.69 seconds with overshoot
equal to 0 (see Figure 4), and the behaviour of the
angle position of the stem of pendulum is shown in
Figure 5.
Figure 3: Fuzzy controller based on the hierarchical
structure for inverted pendulum.
Figure 4: Horizontal position of the cart.
Figure 5: Angle position of the stem of pendulum.
6 CONCLUSIONS
The hierarchical structure makes it possible to
significantly reduce the dimensionality of the control
problem. In our approach, the problem of manually
search for the required parameters was solved with
an optimization algorithm (genetic algorithm). The
proposed algorithm was tested by simulation of the
inverted pendulum control problems. The
parameters of the hierarchical method for the design
specifications of this problem were adequately
found.
Due to the fact that the fitness function is based
on the design specification of the system, we have
the advantage to apply it to any combination of
hierarchical variables. Another very important
advantage is that when the user changes the design
specifications, we can obtain the necessary
hierarchical parameters very quickly by using the
proposed GA. GA helped us not only to
automatically estimate the hierarchical parameters,
but also to improve the results obtained by the
hierarchical method.
a
b
d
c
k
REFERENCES
Ajith A., 2001. Neuro-Fyzzy Systems: State-of-the-art.
Modeling Techniques. Connectionist Models of
Neurons, Learning Processes, and Artificial
Intelligence. Springer-Verlag, LNCS, Jose Mira and
Alberto Prieto (Eds.), Spain, vol. 2084, pp. 269-276.
Anwer M.J, 2005. A Simple Technique for Generation and
Minimization of Fuzzy Rules. IEEE Conference on
Fuzzy Systems, Nevada.
Bezdek J.C., 1974. Cluster validity with fuzzy sets. J.
Cybern., vol. 3, no.3, pp. 58-71.
Chia-Feng Juang, Chin-Teng Lin, 1998. An On-Line Self-
Constructing Neural Fuzzy Inference Network and Its
Applications. IEEE Transaction on Fuzzy Systems,
vol. 6, No.1, pp. 12-32.
Jamshidi M., 1997. Fuzzy Control Systems. Springer-
Verlag, chapter on Soft Computing, pp. 42-56.
Jang Roger, 1993. ANFIS: Adaptive-Network-Based Fuzzy
Inference Systems. IEEE Trans. System Man &
Cybernetics, vol. 23, pp. 665-685.
Kasabov N., Kozma R., and Duch W., 1998. Rule
Extraction from Linguistic Rule Networks and from
Fuzzy Neural Networks: Propositional versus Fuzzy
Rules. Proc. of NEURAP'98, France, pp. 403-406.
Kim J., Kasabov N, 1999. HyFIS: adaptive Neuro-Fuzzy
Inference Systems and their application to nonlinear
dynamical systems. Neural Networks, 12, pp. 1301-
1319.
Nguyen H.T., Prasad N.R., et al, 2003. A First Course in
Fuzzy and Neural Control. Chapman & Hall/CRC.
F
C
1
x
∆x
Ө
∆Ө
x
o
F
C
2
F
C
3
Syste
m
AUTOMATIC ESTIMATION OF PARAMETERS FOR THE HIERARCHICAL REDUCTION OF RULES OF
COMPLEX FUZZY CONTROLLERS
401
