SMART DIFFERENTIAL PRESSURE SENSOR
Michal Pavlik, Jiri Haze, Radimir Vrba and Miroslav Sveda
Brno University of Technology, Udolni 53, CZ-60200 Brno, Czech Republic
Keywords: Pressure measurement, ultra-low power application, current loop, microcontroller overclocking, non-linear
interpolation.
Abstract: This paper presents design and assembly of mixed electronic circuitry for measured signal processing of the
capacitive difference pressure sensor, as well as analysis of the obtained results. The smart pressure sensor
provides values of measured pressure via 4 - 20 mA current loop output. The loop current is also used for
sensor circuitry supplying. This means that current consumption of the whole sensor electronics should be
less than 3.5 mA even in extended industrial temperature range from –40 to +125 °C.
1 INTRODUCTION
There are needs in some industrial branches to
measure difference between two pressures. The
differential measurement system is frequently used
for pressure measurements because of its good
temperature and time stability. The internal
schematic diagram of the differential pressure sensor
can be analyzed is a pair of capacitors sensing to
differential pressure actual values. These capacities
can be up to tens of picofarads. There is no direct
measuring of capacities, but capacities of measured
capacitors are converted to actual output frequency
of a pair of frequency oscillators controlled by
measured capacitors. The most important issue is the
precision of measurement. Total accuracy is required
to be better than that equivalent to 16 binary bits
resolution. Therefore frequency of 255 periods of
the output signal is averaged. The aim of this paper
is the description of the low-power and high-
precision measuring system design.
2 ELECTRONICS TOPOLOGY
The proposed electronic circuitry of the pressure
sensor can be split into three modular parts. Signal
processing of the differential pressure sensor is
realized by a pair of oscillators whose output
frequencies reflect the value of the measured
pressure. Consequently, galvanically separated part
including microcontroller converts the output
frequency values of the oscillators to digital code
values. Besides, embedded microcontroller
calculates non-linear correction of the measured
values and temperature calibration at the same time.
The output quantity of this part of electronic
circuitry is a digital calibrated value of pressure.
According to the desired extended temperature range
from -40 to + 125 °C of the proposed sensor, the
outputs of the oscillators are carried by signal
transformers.
Figure 1: Block diagram of system topology.
memory
oscillators
temperature
sensor
galvanic separation
microcontroller
DC-DC converter
HART protocol modulator
244
Pavlik M., Haze J., Vrba R. and Sveda M. (2007).
SMART DIFFERENTIAL PRESSURE SENSOR.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 244-248
DOI: 10.5220/0001632302440248
Copyright
c
SciTePress
The microcontroller controls galvanically separated
DC-DC changer that supplies oscillators, too. The
block diagram of the electronic circuitry topology is
shown in Fig. 1. A microcontroller is included in the
third part of electronics. The microcontroller is
mainly used for HART modulation of the loop
current communication. The second function of the
microcontroller is active regulation of the actual
current in the current loop by means of sensor
consumption supplying current control.
Interconnection between the second and third stage
of electronics is provided by the SPI bus. These two
parts are galvanically connected.
2.1 Oscillators
Even if oscillators are based on the two basic 555
circuits, there are a few circuitry modifications. Only
one of oscillators is running during actual running
phase of the measurement process. It results in
decreasing power consumption to nearly 65% of the
original one. The ultra low power and fast
comparators MAX939 are used. The crucial
parameters of the comparators are slew rate and
transfer time delay. The application of these
comparators represents the best solution in terms of
power consumption and speed ratio. The precision
of the measurement mainly depends on the reaction
time of the comparators or possibly on the spread of
the overshoot from the reference voltage. The
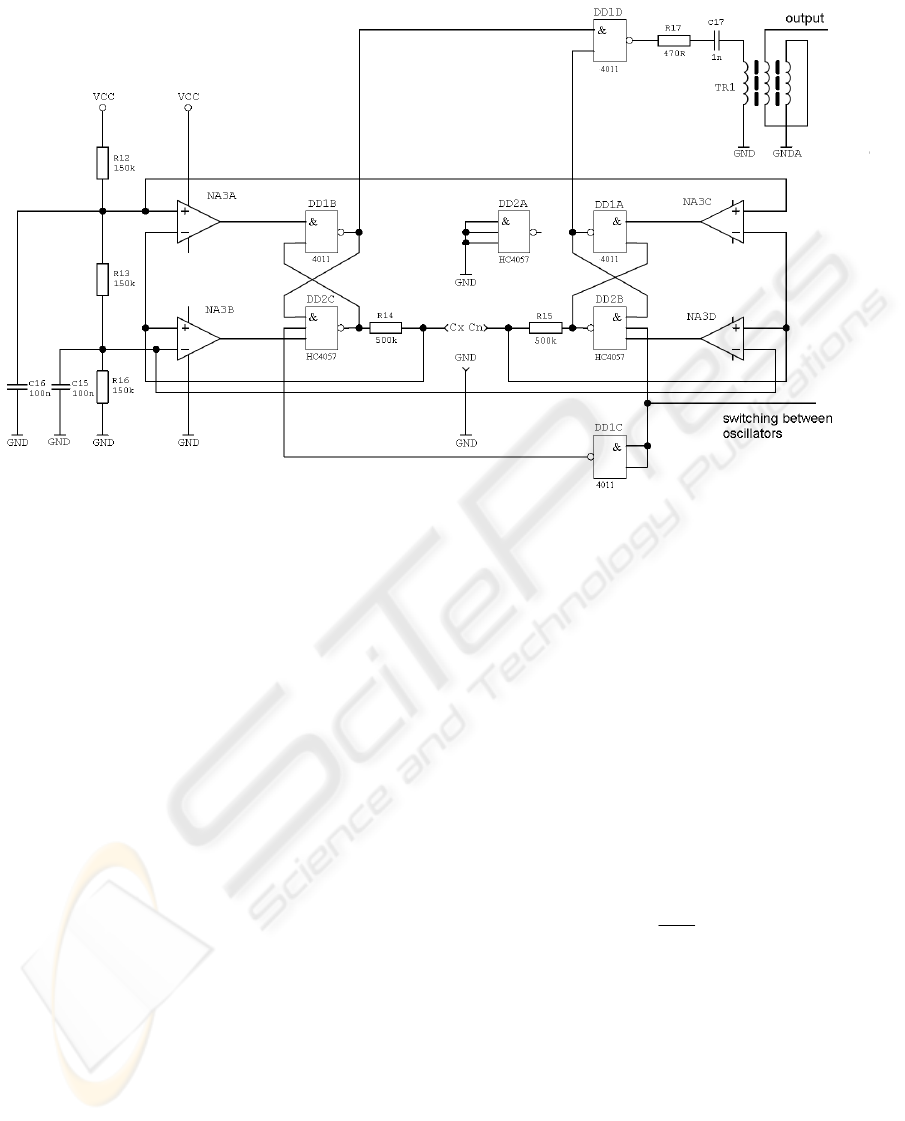
simplified schematic diagram of the oscillators is
shown in Fig. 2. Output signal of the running
oscillator is led via serial combination of the
capacitor and resistor to a primary winding of a
signal transformer. Serial resistor limits flowing
surge current when the logic output is changed.
Unfortunately, restriction of an exciting current
leads to extension of the rising and falling edge of
the transmitted signal. Serial capacity prevents bias
direct current from passing the transformer, thus
protects the transformer against overloading. The
output frequency of the oscillators can be calculated
using a simple equation
C
R
f
out
.2
= ,
(1)
where R is value of reference resistor 500 kΩ and C
represents the measured capacity.
2.2 DC-DC Changer
The DC-DC changer with a transformer was
designed to supply the oscillators. The transformer
provides galvanic separation. In reality, construction
of the switched changer was the only one possible
solution and efficiency better than 50 % was
achieved. The circuitry of the changer consists of a
minimum component and is driven by an embedded
microcontroller. Unfortunately, the feedback cannot
Figure 2: Simplified schematic diagram of galvanically separated oscillators.
SMART DIFFERENTIAL PRESSURE SENSOR
245
be used because it leds to increased power
consumption.
2.3 Measurement Principle
The measurement is based on counting of 255
periods of the measured signal. Microcontroller
system clock is used as a sampling signal. Quiescent
frequency of the oscillators is set to 4.5 kHz. The
microcontroller counts 255 periods in 56 ms. Thus
total measurement time is 112 ms. These
calculations are not correct because the pair of
oscillators are not really identical, but even if real
measurement can be faster or slower, complete
measurement time is constant. This attribute is given
by design of the differential pressure sensor. The
measurement algorithm is implemented in the
microcontroller as follows: Counter/Timer0 (C/T0)
is configured as an 8-bit counter (it means 255
period of input signal). The Counter/Timer1 (C/T1)
runs as a 16-bit timer with 125 kHz clock before the
counting is allowed. The low system frequency of
the microcontroller significantly reduces power
consumption [3]. But minimal 1 MHz of the system
frequency is needed to suppose desired measurement
accuracy. Due to when 253 periods are counted the
microcontroller is over-clocked to 2 MHz. The value
in C/T1 is stored for next processing and C/T1 is
cleared. When the 255 periods are counted, the
interrupt is called and value in C/T1 is red. This
value reflects the measured capacity. With no
pressure the counter counts approximately 112 000
pulses from each oscillator. By using equation
2log
log
x
n =
,
(2)
where x represents numbers of levels and n is a bit
resolution, we can calculate that we can measure
oscillator frequencies with more than 16-bit
resolution.
This accuracy is adequate. For effective
processing of the measured values, the working
variable A(p) is evaluated. Variable A(p) represents
uncorrected digital pressure
21
21
)(
ff
ff
pA
+
−
= ,
(3)
where f
1
and f
2
are measured frequencies of
oscillator output signals. At next stage the working
variable A(p) is calibrated using non-linear
corrections by hi-order polynomial. The calibration
provides linear response of the output value to the
pressure. The calibrated output value presents the
digital pressure and is set in specified units (bar,
kPa, etc.). After all linearization and calibration
processes the value is sent via SPI to the second
microcontroller which provides transmitting into the
current loop.
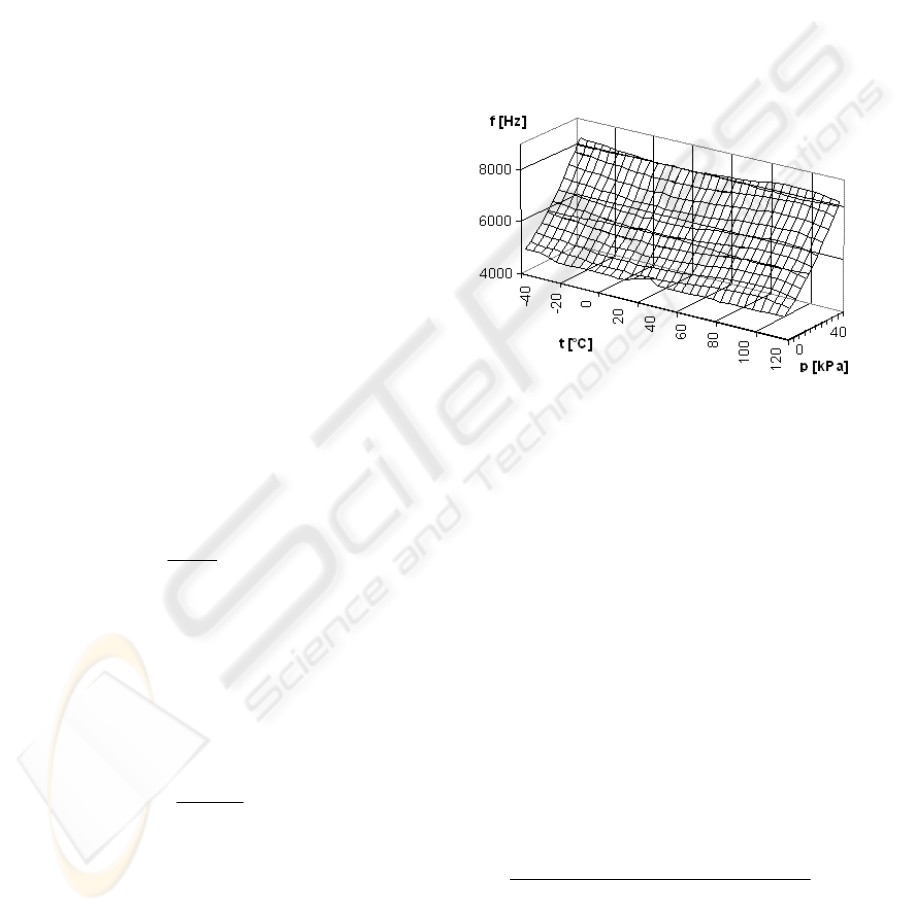
2.4 Corrections
Two corrections are calculated by the embedded
microcontroller. At first, the linearization, offset
calibration and gain correction are calculated. Next,
the temperature dependence of the measuring
electronics is compensated. Fig. 3 shows enumerated
dependencies in a 3D graph.
Figure 3: The oscillator output frequency dependence on
pressure and temperature.
There are a few calibration methods for example
lookup tables but these methods are usually of a high
cost and time consuming [2]. The polynomial of
fifth to eighth order is used for calibration of the
variable A(p). The basic form of the polynomial is
n
n
xaxaxaay ++++= ..
2
210
(4)
The Lagrange’s polynomial is used for calculation of
the calibration constants. The Lagrange’s
polynomial is the lowest order polynomial which
goes through specified values [4]. The Lagrange’s
polynomial can be calculated by
∑
=
n
i
ii
xf
1
)(
λ
(5)
where
(
)
(
)
(
)( ) ( )
()( )( )( )( )
niiiiiii
nii
i
xxxxxxxxxx
xxxxxxxxxx
−−−−−
−−−−−
=
+−
+−
......
......
1121
1121
λ
.
(6)
The calibration data is stored in FRAM embedded
on the oscillator board.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
246
2.5 HART Protocol
For communication over the 4 - 20 mA current loop,
the HART protocol is used [1]. Signal current
modulation is provided by the second
microcontroller. Transmitting is done using
controlled loading. The regulated loading circuitry is
very simple and consists of an NPN type bipolar
transistor with a grounded emitter and a driving DA
converter. Current consumption is minimized thanks
to simplicity of the regulated loading.
3 RESULTS
After design, assembly and programming of the
microcontroller real measurements were done. The
frequencies of the oscillators, working variable A
and digital pressure values were logged. These
values were logged for many different pressures
over the whole sensor range. From the measured
data the bias noise was figured out by equation
minmax
max
NN
N
N
f
−
Δ
= ,
(7)
where ΔN
max
represents the maximal deviation from
the mean value of a few samples for a specified
pressure in the whole measuring range, N
max
is value
of the output with maximal pressure and N
min
is
value of the output with no pressure.
The bias noise in the whole measuring range was
only 0.82 ‰. By conversion of the bias noise to the
bit resolution the 13.57 effective bit resolution was
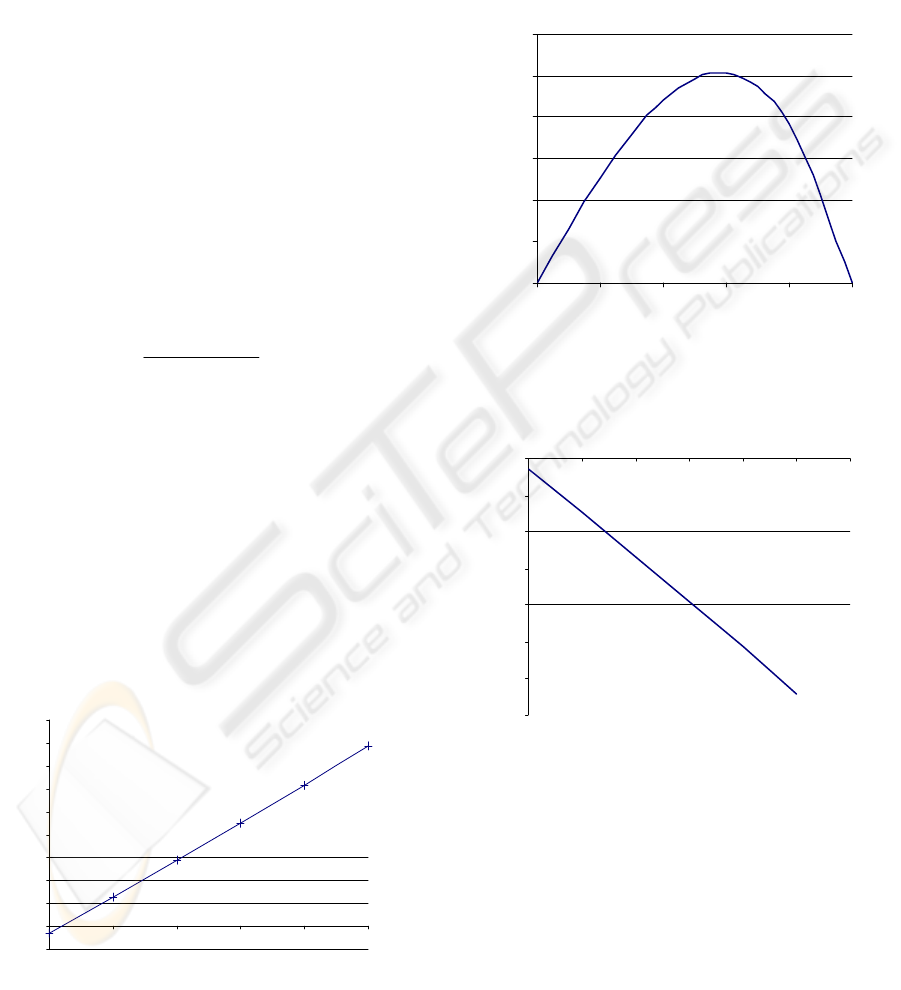
achieved. The linearity degree of the working
variable which determines order of the correction
polynomial is very important. The dependence of the
variable A(p) on pressure is shown in Fig. 4.
Figure 4: Dependence of the measured output on the
pressure.
We can observe deviations of the measured
waveform in Fig. 5.
And finally, deviation of the corrected
waveform is shown in Fig. 6, after calculating of the
Lagrange polynomial constants and their application
from the linear waveform.
Figure 5: Deviations of the measured waveform.
Figure 6: Deviations of the calibrated waveform.
4 CONCLUSIONS
A smart differential capacity pressure sensor was
designed and assembled. The system consists of
three parts – oscillators, processing microcontroller
and HART modulator. Ultra low-power devices and
special measuring algorithm in microcontroller were
used to reduce power consumption bellow 3.5 mA.
The Lagrange polynomials were applied to calculate
-0,05
0
0,05
0,1
0,15
0,2
0,25
0,3
0,35
0,4
0,45
0 1020304050
p [kPa]
x [-]
0
0,001
0,002
0,003
0,004
0,005
0,006
0 1020304050
p [kP a]
Δ
A
[-]
-0,00014
-0,00012
-0,0001
-0,00008
-0,00006
-0,00004
-0,00002
0
0 102030405060
p [kPa]
Ak [-]
SMART DIFFERENTIAL PRESSURE SENSOR
247

the measured values calibration. It improves
linearity more than ten times.
ACKNOWLEDGEMENTS
The research has been supported by the Czech
Ministry of Education within the framework of the
Research Program MSM0021630503 MIKROSYN,
by the Czech Grant Agency in projects GACR
102/03/0619 and GACR 102/03/H105, and by the
Ministry of Industry and Commerce in projects FF-
P/112 and FT-TA/050.
REFERENCES
HART communication foundation (2007) HART
specification,
http://www.hartcomm2.org/hart_protocol/protocol/har
t_specifications.html
Kouider, M. Nadi, M. and Kourtiche D. (2003) Sensors
Auto-calibration Method - Using Programmable
Interface Circuit Front-end, SENSORS 2003, ISSN
1424-8220
Holberg, A.M. and Seatre A. (2006) Innovative
Techniques for Extremely Low Power Consumption
with 8-bit Microcontrollers, ATMEL White Paper
Mori, H. and Yamada S. (2003) Continuation Power Flow
with the Nonlinear Predictor of the Lagrange’s
Polynomial Interpolation Formula, IEE Japan
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
248
