FUZZY LOGIC ALGORITHM FOR MOBILE ROBOT CONTROL
Viorel Stoian and Cristina Pana
University of Craiova, Mechatronics Department, Decebal Street No. 107, Craiova, Romania
Keywords: Fuzzy logic algorithm, mobile robots, obstacole avoidance, trajectory controller.
Abstract: This paper presents a fuzzy control algorithm for mobile robots which are moving next to the obstacle
boundaries, avoiding the collisions with them. Four motion cycles (programs) depending on the proximity
levels and followed by the mobile robot on the trajectory (P1, P2, P3, and P4) are shown. The directions of
the movements corresponding to every cycle, for every reached proximity level are presented. The sequence
of the programs depending on the reached proximity levels is indicated. The motion control algorithm is
presented by a flowchart showing the evolution of the functional cycles (programs). The fuzzy rules for
evolution (transition) of the programs and for the motion on X-axis and Y-axis respectively are described.
Finally, some simulations are presented.
1 INTRODUCTION
Fuzzy set theory, originally developed by Lotfi
Zadeh in the 1960’s, has become a popular tool for
control applications in recent years (Zadeh, 1965).
Fuzzy control has been used extensively in
applications such as servomotor and process control.
One of its main benefits is that it can incorporate a
human being’s expert knowledge about how to
control a system, without that a person need to have
a mathematical description of the problem.
Many robots in the literature have used fuzzy
logic (Song, 1992, Khatib, 1986, Yan, Ryan, Power,
1989 …). Computer simulations by Ishikawa feature
a mobile robot that navigates using a planned path
and fuzzy logic. Fuzzy logic is used to keep the
robot on the path, except when the danger of
collision arises. In this case, a fuzzy controller for
obstacle avoidance takes over.
Konolige, et al. use fuzzy control in conjunction
with modeling and planning techniques to provide
reactive guidance of their robot. Sonar is used by
robot to construct a cellular map of its environment.
Sugeno developed a fuzzy control system for a
model car capable of driving inside a fenced-in
track. Ultrasonic sensors mounted on a pivoting
frame measured the car’s orientation and distance to
the fences. Fuzzy rules were used to guide the car
parallel to the fence and turn corners (Sugeno et al.,
1989).
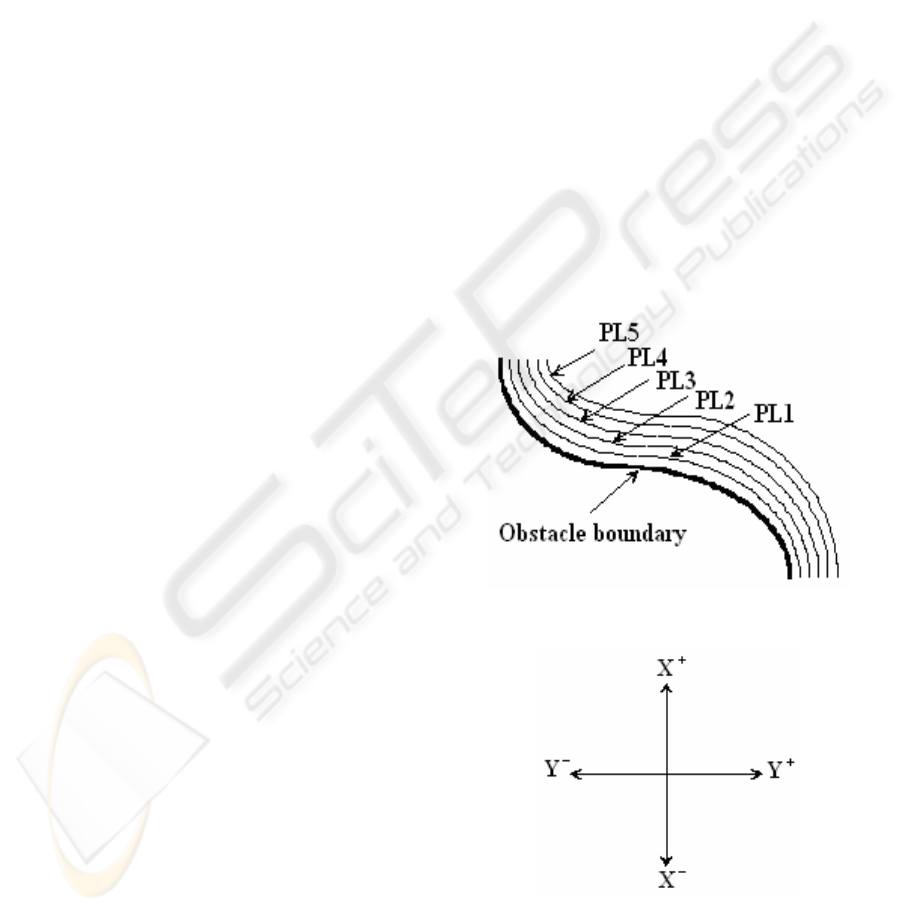
a) The proximity levels.
b) The two degrees of freedom of the locomotion system
of the mobile robot.
Figure 1: The proximity levels and the degrees of freedom
of the robot motion.
244
Stoian V. and Pana C. (2007).
FUZZY LOGIC ALGORITHM FOR MOBILE ROBOT CONTROL.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 244-247
DOI: 10.5220/0001633002440247
Copyright
c
SciTePress
2 CONTROL ALGORITHM
The mobile robot is equipped with a sensorial
system to measure the distance between the robot
and object that permits to detect 5 proximity levels
(PL): PL1, PL2, PL3, PL4, and PL5. Figure 1a
presents the obstacle (object) boundary and the five
proximity levels and Figure 1b presents the two
degrees of freedom of the locomotion system of the
mobile robot. This can move either on the two
rectangular directions or on the diagonals (if the two
degrees of freedom work instantaneous).
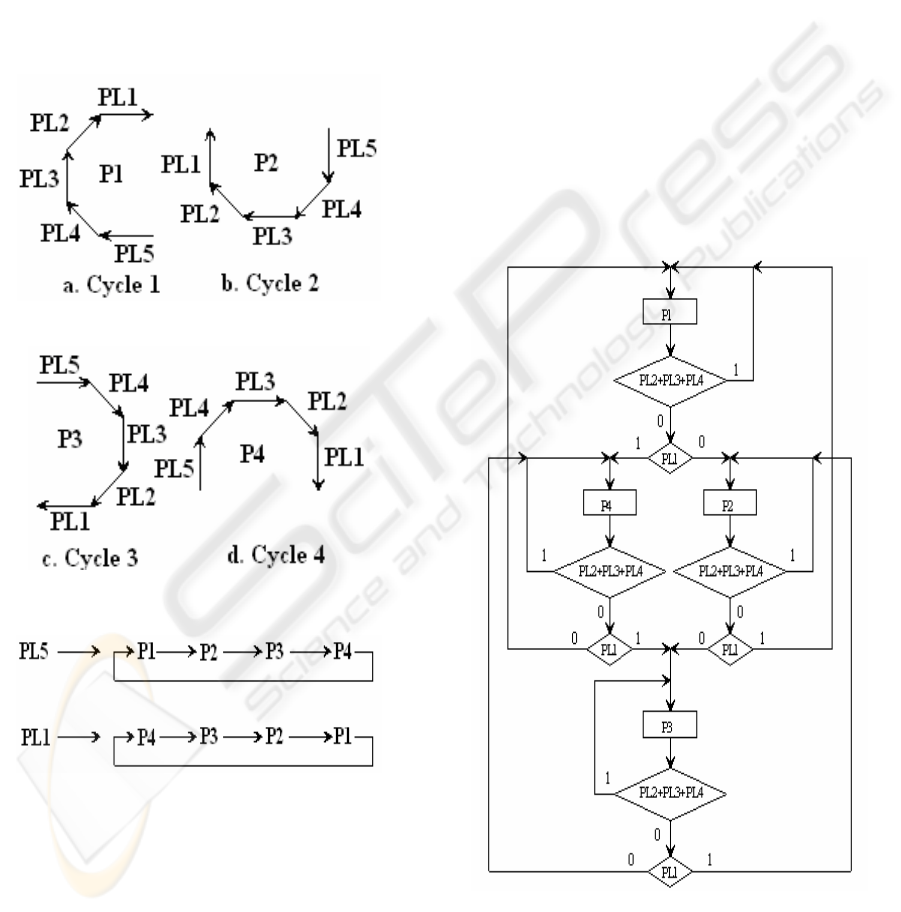
2.1) Motion cycles (programs)
2.2) The sequence of the programs
Figure 2: The sequences of the motion.
The goal of the proposed control algorithm is to
move the robot near the object boundary with
collision avoidance. Figure 2a shows four motion
cycles (programs) which are followed by the mobile
robot on the trajectory (P1, P2, P3, and P4). Inside
every cycle are presented the directions of the
movements (with arrows) for every reached
proximity level. For example, if the mobile robot is
moving inside first motion cycle (cycle 1 or program
P1) and is reached PL3, the direction is on Y-axis
(sense plus) (see Figure 1b, too). In Figure 2b we
can see the sequence of the programs.
One program is changed when are reached the
proximity levels PL1 or PL5. If PL5 is reached the
order of changing is: P1ÆP2ÆP3ÆP4Æ P1Æ
If PL1 is reached the sequence of changing
becomes: P4ÆP3ÆP2ÆP1Æ P4Æ
The motion control algorithm is presented in
Figure 3 by a flowchart of the evolution of the
functional cycles (programs). We can see that if
inside a program the proximity levels PL2, PL3 or
PL4 are reached, the program is not changed. If PL1
or PL5 proximity levels are reached, the program is
changed. The flowchart is built on the base of the
rules presented in Figure 2.1 and Figure 2.2.
Figure 3: The flowchart of the evolution of the functional
cycles (programs).
FUZZY LOGIC ALGORITHM FOR MOBILE ROBOT CONTROL
245

Figure 4: The inputs and outputs of the fuzzy algorithm.
3 FUZZY ALGORITHM
a) Membership functions of the proximity levels (distance)
measured with the sensors
b) Membership functions of the angle (the programs)
c) Membership functions of the X comands
d) Membership functions of the Y comands
Figure 5: Membership functions of the I/O variables.
The fuzzy controller for the mobile robots based
on the algorithm presented above is simple. Most
fuzzy control applications, such as servo controllers,
feature only two or three inputs to the rule base. This
makes the control surface simple enough for the
programmer to define explicitly with the fuzzy rules.
The above robot example uses this principle, in
order to explore the feasibility of using fuzzy control
for its tasks. Figure 4 presents the inputs (distance-
proximity levels and the program on k step) and the
outputs (movement on X and Y-axes and the
program on k+1 step) of the fuzzy algorithm.
For the linguistic variable “distance proximity
level” we establish to follow five linguistic terms:
“VS-very small”, “S-small”, “M-medium”, “B-big”,
and “VB-very big”. Figure 5a shows the
membership functions of the proximity levels
(distance) measured with the sensors and Figure 5b
shows the membership functions of the angle (the
programs). If the object is like a circle every
program is proper for a quarter of the circle.
Figure 5c and Figure 5d present the membership
functions of the X, respectively Y commands
(linguistic variables). The linguistic terms are: NX-
negative X, ZX-zero X, PX-positive X, and NY, ZY,
PY respectively.
Table 1: Fuzzy rules for evolution of the programs.
VS S M B VB
P1 P4 P1 P1 P1 P2
P2 P1 P2 P2 P2 P3
P3 P2 P3 P3 P3 P4
P4 P3 P4 P4 P4 P1
Table 2: Fuzzy rules for the motion on X-axis.
VS S M B VB
P1 PX PX ZX NX NX
P2 ZX NX NX NX ZX
P3 NX NX ZX PX PX
P4 ZX PX PX PX ZX
Table 3: Fuzzy rules for the motion on Y-axis.
VS S M B VB
P1 ZY PY PY PY ZY
P2 PY PY ZY NY NY
P3 ZY NY NY NY ZY
P4 NY NY ZY PY PY
Table 1 describes the fuzzy rules for evolution
(transition) of the programs and Table 2 and Table 3
describe the fuzzy rules for the motion on X-axis
and Y-axis, respectively. Table 1 implements the
sequence of the programs (see Figure 2.2 and Figure
3) and Table 2 and Table 3 implement the motion
cycles (see Figure 2.1 and Figure 3).
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
246
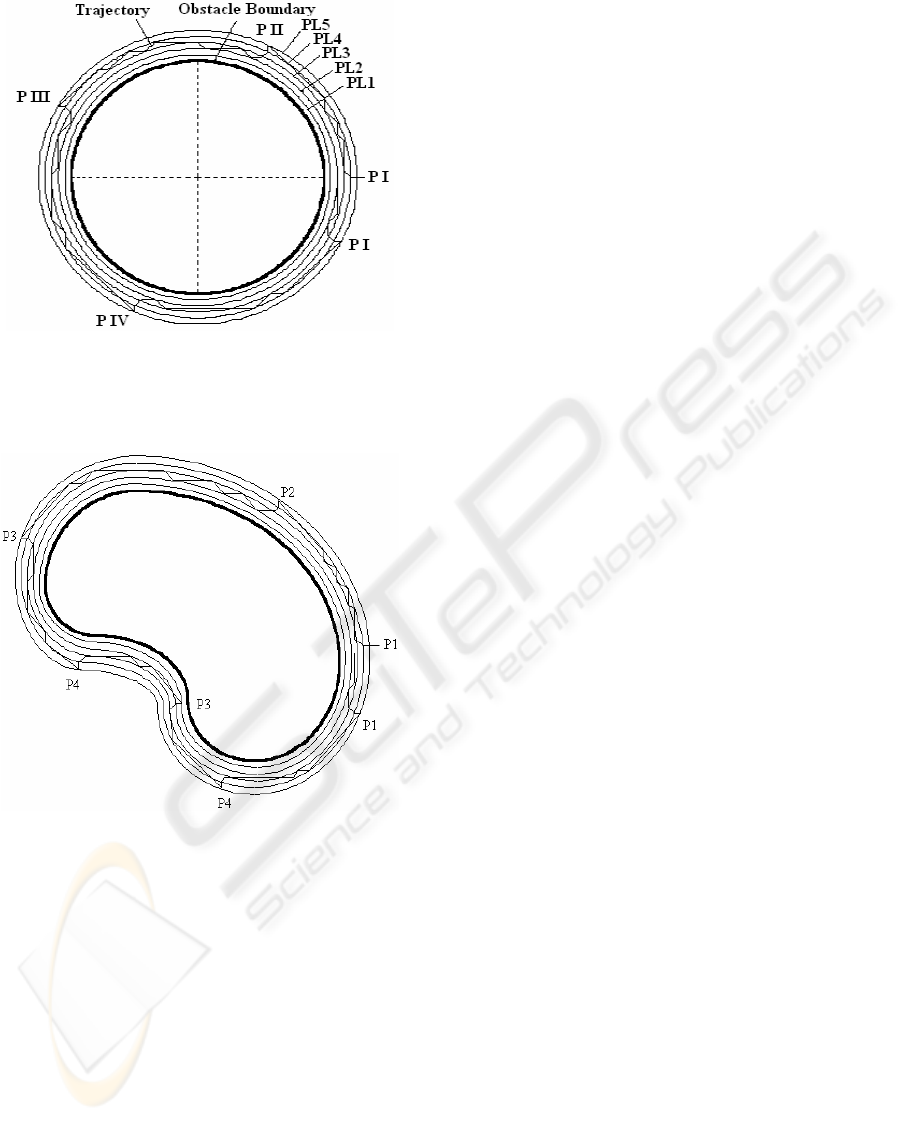
Figure 6: The trajectory of the mobile robot around a
circular obstacle.
Figure 7: The trajectory of the mobile robot around a
irregular obstacle.
4 SIMULATIONS
In the simulations can be seen the mobile robot
trajectory around an obstacle (object) with circular
boundaries (Figure 6) and around an obstacle
(object) with irregular boundaries (Figure 7). One
program is changed when are reached the proximity
levels PL1 or PL5. If PL5 is reached the order of
changing becomes as follows: P1ÆP2ÆP3ÆP4Æ...
If PL1 is reached the order of changing is becomes
follows: P4ÆP3ÆP2ÆP1Æ P4Æ ……
5 CONCLUSIONS
This paper presents a fuzzy control algorithm for
mobile robots which are moving next to the obstacle
boundaries, avoiding the collisions with them. Four
motion cycles (programs) depending on the
proximity levels and followed by the mobile robot
on the trajectory (P1, P2, P3, and P4) are shown.
The directions of the movements corresponding to
every cycle, for every reached proximity level are
presented. The sequence of the programs depending
on the reached proximity levels is indicated. The
motion control algorithm is presented by a flowchart
showing the evolution of the functional cycles
(programs). The fuzzy rules for evolution
(transition) of the programs and for the motion on X-
axis and Y-axis respectively are described. The
fuzzy controller for the mobile robots based on the
algorithm presented above is simple. Finally, some
simulations are presented. If the object is like a
circle, every program is proper for a quarter of the
circle.
REFERENCES
Zadeh, L. A., 1965. Fuzzy Sets, Information and Control,
No 8, pp. 338-353.
Sugeno, M., Murofushi, T., Mori, T., Tatematasu, T., and
Tanaka, J., 1989. Fuzzy Algorithmic Control of a
Model Car by Oral Instructions, Fuzzy Sets and
Systems, No. 32, pp. 207-219.
Song, K.Y. and Tai, J. C., 1992. Fuzzy Navigation of a
Mobile Robot, Proceedings of the 1992 IEEE/RSJ
Intern. Conference on Intelligent Robots and Systems,
Raleigh, North Carolina.
Khatib, O., 1986. Real-Time Obstacle Avoidance for
Manipulators and Mobile Robots, International
Journal of Robotics Research, Vol. 5, No.1, pp. 90-98.
Boreinstein, J. and Koren, Y., 1989. Real-time Obstacle
Avoidance for Fast Mobile Robots, IEEE Transactions
on Systems, Man., and Cybernetics, Vol. 19, No. 5,
Sept/Oct. pp. 1179-1187.
Jamshidi, M., Vadiee, N. and Ross, T. J., 1993. Fuzzy
Logic and Control. Software and Hardware
Applications, PTR, Prentice Hall, New Jersey, USA.
Yan, J., Ryan, M., and Power, J., 1994. Using Fuzzy
Logic. Towards intelligent systems, Prentice Hall, New
York.
FUZZY LOGIC ALGORITHM FOR MOBILE ROBOT CONTROL
247
