
A DISCRETE-EVENT SYSTEM APPROACH TO MULTI-AGENT
DISTRIBUTED CONTROL OF CONTAINER TERMINALS
Guido Maione
DEESD, Technical University of Bari, Viale del Turismo, 8 - 74100, Taranto, Italy
Keywords: Multi-Agent Systems, Discrete Event Systems, Container Terminals, Transport Systems.
Abstract: The area of modelling and controlling intermodal terminal systems is relatively new. The paradigms of
Discrete Event Systems for modelling and of Multi-Agent Systems (MAS) for distributed control seem
promising. Many research attempts developed modelling and simulation tools but no standard exists. This
paper presents a Discrete Event System model of the agents introduced to describe how a distributed control
of the terminal activities can be achieved. The interactions between four classes of agents are detailed. The
approach is useful to develop a simulation platform to test MAS efficiency in terminal management and to
measure the performance of static or adapted control strategies.
1 INTRODUCTION
Planning and scheduling resources in a maritime
container terminal pose very complex modelling and
control problems to the scientific community.
Flexible and powerful modelling and simulation
tools are necessary to describe an intermodal hub
system made up of many different infrastructures
and services. In the absence of standard tools,
several research studies are based on discrete event
simulation techniques (Vis and De Koster, 2003), on
mathematical models or empirical studies (Crainic et
al., 1993, Gambardella et al., 1998).
In the context of intelligent control of transport
systems, this paper uses the Discrete EVent System
(DEVS) specification technique (Zeigler et al.,
2000) to completely and unambiguously characterize
a Multi-Agent System (MAS) for controlling a
container terminal. Autonomous agents play as
atomic dynamic DEVS. They exchange messages
one with another to negotiate services in a common
environment. The DEVS approach leads to
heterarchical MAS where all information and
control functions are distributed across agents, and
allows rigorous theoretical analysis of structural
properties of the MAS. Moreover, the DEVS
formalism is an interesting alternative to other tools
for MAS specification (Huhns and Stephens, 2001,
Lin and Norrie, 2001). It is suitable to develop
models both for simulation and for implementation
of the software controllers.
As in MAS for manufacturing control (Heragu,
2002), agents can use decision algorithms based on a
fictitious currency to buy services from other seller
agents which use pricing strategies. Sellers and
buyers reach an equilibrium between conflicting
objectives, i.e. to maximize profit and to minimize
costs, respectively. Recent analytical models of
negotiation (Hsieh, 2004) underline the need of a
systematical analysis and validation method for
distributed networks of autonomous agents. Other
researches focus on the experimental and detailed
validation of MAS on distributed simulation
platforms (Shattenberg and Uhrmacher, 2001, Logan
and Theodoropoulos, 2001).
Here, a detailed DEVS model is developed for
the interactions between the agents concurrently
operating for the critical downloading process of
containers from a ship. This paper is a contribution
to define a complete DEVS model to develop a
simulation platform for testing and comparing the
proposed MAS with other distributed control
architectures for container terminals. The simulation
model could be used to design and test alternative
system layouts and different control policies, both in
standard and perturbed operating conditions.
The paper is organized as follows. Section 2
describes the main processes in a terminal. Then, the
basic components of the MAS are presented, and
their roles and relations are indicated. Section 3
models agents as atomic DEVS, and focuses on their
interactions when containers are downloaded from
300
Maione G. (2007).
A DISCRETE-EVENT SYSTEM APPROACH TO MULTI-AGENT DISTRIBUTED CONTROL OF CONTAINER TERMINALS.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 300-305
DOI: 10.5220/0001633603000305
Copyright
c
SciTePress

ships to the terminal yard. Section 4 gives some
ideas about the simulation platform to test efficiency
and robustness of the proposed MAS architecture.
Section 5 overviews the benefits of the approach and
enlightens open issues.
2 THE MAS FRAMEWORK FOR
CONTAINER TERMINALS
To define the autonomous agents operating and
interacting in a terminal environment, the main
terminal processes have to be abstracted. They are
commonly identified as import, export, and
transshipment cycles.
2.1 Import, Export and Transshipment
Cycles in a Container Terminal
Imported containers arrive on a vessel or feeder ship
and depart by trains/trucks. Exported containers
arrive by trains/trucks and depart on a vessel ship
(transition from railway/road to sea mode).
Transshipped containers arrive and depart by ship:
cargo is moved from vessel (feeder) to feeder
(vessel) ships for close (far) destinations.
Then, containers have to be: loaded/downloaded
on/from ships; delivered/picked to/from trucks or
trains; stacked and kept in blocks, in which the
terminal yard is divided; transferred from
ship/train/truck to blocks and backwards;
consolidated, i.e. redistributed between blocks to
allow fast retrieval. To this aim, several dedicated or
shared resources are used: quay cranes, yard cranes,
railway cranes; internal transport vehicles (trailers);
quays and berths, lanes for internal transport, gates,
railway tracks; skilled human operators.
A road import cycle follows three steps. Firstly,
quay cranes download containers from a berthed
ship to trailers, which transfer cargo to yard. Here,
yard cranes pick-up containers from trailers and
stack them in assigned positions. Secondly,
containers stay in the blocks while waiting for their
destination; they are eventually relocated by yard
cranes and trailers in a more proper position.
Thirdly, containers are loaded from blocks to trucks,
and exit from the gate. Similarly, in a railway import
cycle, yard cranes pick-up containers from blocks
and load them on trailers moving from yard to the
railway connection, where special cranes pick-up
containers to put them on departing trains.
In a road/railway export cycle, the sequence goes
in the opposite sense: from terminal gate or railway
connection to blocks and then to vessel ships.
In a transshipment cycle, when a vessel ship
arrives, containers are downloaded to trailers by
quay cranes, transferred to blocks by trailers, picked-
up and stacked by yard cranes. After a consolidation
and/or a delay in their position, containers are
picked-up and transferred to the quay area, where
they are loaded on a feeder ship. The opposite
occurs if a feeder arrives and a vessel departs.
Here, the focus is on the first step of the import
and transshipment cycles. Similar models can be
defined for the following steps and the export cycle.
2.2 Agents in a Container Terminal
The main agents controlling a terminal are:
the Container Agent (CA): each CA is an
autonomous entity controlling the flow of a
single or a group of containers (stowed in a
ship bay or stacked in yard blocks);
the Quay crane Agent (QA): it is an
autonomous controller for a (set of) quay
crane(s) with the same performances or the
same reachable ship bays;
the Trailer Agent (TA): it is associated to a
(set of) trailer(s) with the same performances,
or with the same reachable quay or yard
spaces;
the Yard crane Agent (YA): it manages a (set
of) yard crane(s) with the same performances,
or associated to the same yard blocks;
the Railway crane Agent (RA): it controls a
(set of) railway crane(s), to receive containers
from trailers and load them on trains at the
railway connection, or to deliver containers
from trains to trailers;
the Truck Agent (KA): it follows the
operations executed by a (set of) truck(s),
entering or leaving the terminal by its gate.
In import processes, the CA identifies the most
suitable quay crane to download containers from
ship, then it selects the trailers to transport
containers to their assigned yard blocks, and finally
the yard cranes to pick-up and stack containers in
their assigned block positions. In export processes,
the CA selects the yard cranes to pick-up containers
from blocks, trailers to transport them to the quay
area, and quay cranes to load them into their
assigned bay-row-tier location in the ship.
The decisions taken by a CA are based upon
real-time updated information received from agents
of the alternative available cranes and trailers.
The global control of the activities in the
terminal emerges from the behaviour of concurrently
operating agents. The dynamical interaction between
agents has to be analysed to specify the desired
A DISCRETE-EVENT SYSTEM APPROACH TO MULTI-AGENT DISTRIBUTED CONTROL OF CONTAINER
TERMINALS
301

system behaviour. The precedent observations lead
us to examine interactions between a CA and several
QAs, TAs, and YAs for downloading, transferring,
and stacking containers, or for picking, transferring,
and loading containers. Interactions exist also
between a CA and YAs, TAs, and RAs/KAs when
railway/road cycles are considered.
The agents' decisions are only limited by
constraints of terminal spaces and resources (e.g.,
the limited number of quay cranes that can serve a
fixed ship bay; the limited number of yard cranes),
and of schedules for downloading/loading processes
(establishing the number of containers moved for
each ship bay, the location in the ship hold or cover,
sequence of handling moves, the preferred crane).
Agents' decisions are fulfilled by human
operators devoted to the associated resources (e.g.
crane operators, trailer/truck drivers). The network
of interacting agents may appear and behave as a
unique distributed supervisor for the terminal.
3 DEVS MODELLING OF
AGENTS' DYNAMICS
Each agent in the previously identified classes is
described as an atomic DEVS. Namely, all agents
interact by transmitting outputs and receiving inputs,
which are all considered as event messages. Events
are instantaneous, then timed activities are defined
by a start-event and a stop-event.
For each agent, internal events are triggered by
internal mechanisms, external input events (i.e.
inputs) are determined by exogenous entities (other
agents), and external output events (i.e. outputs) are
generated and directed to other entities.
External or internal events change the agent
state. An agent stays in a state until either it receives
an input or the time specified before an internal
event elapses. In the first case, an external transition
function determines the state next to the received
input; in the second case, an internal transition
function gives the state next to the internal event. An
output function generates the reactions of the agent.
The sequential state, s, refers to the transition
mechanism due to internal events, and is based on
the current value of status (condition between
consecutive events) and other information i peculiar
to the considered agent: s = (status, i). The total state
q = (s, e, DL), where e is the time elapsed since the
last transition, and DL is the decision logic currently
used by the agent to rank and choose the offers
received by other agents.
For a CA, s may include information on: the
current container position; the quay cranes available
for negotiating handling operations; the trailers
available for negotiating transport between quay and
yard; the yard cranes available for negotiating
handling operations from trailer to a block position
or backwards; time scheduled in current state before
the next internal event, if no input occurs.
For QAs, YAs, TAs, RAs, KAs, the sequential
state may include the queued requests coming from
CAs (for availability, for data about offered service,
for confirmation of assigned service, etc.), and the
time prospected before the next internal event.
To summarize, each agent can be represented as
an atomic DEVS in the following way:
A = < X, Y, S,
δ
int
,
δ
ext
,
λ
, ta >
(1)
where X is the set of inputs, Y is the set of outputs, S
is the set of sequential states,
δ
int
:S→S is the internal
transition function,
δ
ext
:Q×X→S is the external
transition function, Q={q=(s,e,DL)|s∈S,0≤e≤ta(s)},
λ
:S→Y is the output function, ta:S→ℜ
0
+
is the time
advance function, with ℜ
0
+
set of positive real
numbers with 0 included.
The negotiation between agents is typically
organized in the following steps. Announcement: an
agent starts a bid and requires availability to other
agents for a service. Offer: the agent requests data
only to the available agents. Data regard the offered
service the queried agents can guarantee. Reward:
the agent selects the best offer between the collected
replies and sends a rewarding message.
Confirmation: the agent waits for a message from
the rewarded agent, then it acquires the service. If
confirmation does not arrive, then the agent selects
another offer in the rank or restarts the bid.
In this paper, the focus is on the interactions
between a CA with QAs, TAs and YAs for
downloading containers from ship to a yard block.
The study can be easily extended to other
negotiations for loading or other processes. Besides,
the status transitions are examined since the status is
the main component of the sequential state.
3.1 Dynamics of Interactions between
Agents in a Downloading Process
To download containers from a ship bay, transport
and stack them into a yard block, each CA interacts
with QAs to choose the quay crane for downloading,
with TAs to select the trailers for moving the
containers from the quay to the yard area, and finally
with YAs to determine the yard cranes for stacking.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
302

We assume that the CA firstly communicates
exclusively with QAs, then with TAs only, finally
with YAs. The negotiation is based on data about the
offered services: a QA gives the estimated time to
wait before the related crane can start downloading
containers, and the estimated time to execute the
task; a TA the estimated times to wait a trailer and
for the transport task; a YA the estimated time for
the yard crane to be ready close to the block, and the
estimated time for the stacking task.
3.1.1 Interactions between a CA and QAs
For t<t
C0
let the CA, say C, associated with a generic
container be in a quiescent status (QUIESC) and let
it begin its activity at t
C0
(input X
C0
). Then C spends
the interval [t
C0
,t
C1
] to send outputs Y
C01
, Y
C02
,…,
Y
C0q
at instants t
01
>t
C0
, t
02
,…, t
0q
=t
C1
. These
messages request the availability to all the q
alternative QAs of cranes that can serve the
container. The sequence of requests (REQQAV) is
not interrupted by any internal or external event. C
makes transition at t
C1
(internal event I
C1
).
In [t
C1
,t
C2
] C waits for answers (WAIQAV) from
QAs. Namely, the request C transmits to each QA
may queue up with similar ones sent by other CAs.
Next transition occurs at t
C2
when either C receives
all the answers from the queried QAs (X
C1
), or a
specified time-out of WAIQAV expires before C
receives all the answers. In case it receives no reply
within the time-out (I
C2
), C returns to REQQAV and
repeats the request procedure. In case of time-out
expiration and some replies received (I
C3
), C
considers only the received answers to proceed. The
repeated lack of valid replies may occur for system
congestion, crane failures, communication faults, or
other unpredictable circumstances. To avoid
indefinite circular waits and improve system fault-
tolerance, we use time-outs and let C repeat the
cycle REQQAV-WAIQAV only a finite number of
times, after which C is replaced by another agent.
If all or some replies arrive before the time-out
expiration, C starts requesting service to the g≤q
available QAs at t
C2
. In [t
C2
,t
C3
] C requests
information with Y
C11
, Y
C12
, …, Y
C1g
at instants
t
11
>t
C2
, t
12
,…, t
1g
=t
C3
. The uninterrupted sequence of
requests in status REQQSE terminates at t
C3
and C
makes transition (I
C4
).
Then, C spends [t
C3
,t
C4
] waiting for offers from
the available QAs (WAIQOF), as the request C
transmits to each QA may queue up with those sent
by other CAs. Next transition occurs at t
C4
when
either all the answers from the QAs arrive (X
C2
) or a
time-out of WAIQOF expires. In case no reply
comes within the time-out (I
C5
), C returns to
REQQSE and restarts. If time-out expires and some
replies are received (I
C6
), C considers only the
received offers. Again, cycling between REQQSE
and WAIQOF is only for a finite number of times.
Once received the offers from QAs, C uses
[t
C4
,t
C5
] to take a decision for selecting the quay
crane (TAKQDE). At t
C5
the decision algorithm ends
(I
C7
): all the offers are ranked and a QA is selected.
Subsequently, C reserves the chosen crane with
message Y
C2
to the corresponding QA. C takes
[t
C5
,t
C6
] for communicating the choice to the winner
QA (COMCHQ). At t
C6
the communication ends
(I
C8
). Now, the QA sends X
C5
: a rejection, if there is
a conflict with another CA, or a confirmation.
Hence, C uses [t
C6
,t
C7
] to wait for a confirmation
from the selected QA (WAIQCO). The confirmation
is necessary because CAs different from C act
during the decision interval, and the selected crane
can be no longer available. If C receives a rejection
(X
C3
), or no reply within a time-out (I
C9
), it returns
to COMCHQ, sends a new request of confirmation
to the second QA in its rank. If C has no alternative
destinations and the rejection (X
C4
) or the time-out
(I
C10
) occurs, it returns to REQQAV and restarts.
At t
C7
, after receiving a confirmation (X
C5
) from
the selected QA, C makes a transition to DWNLDG:
interval [t
C7
,t
C8
] is for issuing the command Y
C3
to
the quay crane downloading the container.
Figure 1 depicts the complex dynamics
previously described. Circles represent status-values
and encapsulate outputs, arrows represent internal or
input events.
3.1.2 Other Interactions
When, at time t
C8
, the command is complete (I
C11
), C
starts the negotiation with TAs for a trailer.
C follows the same procedure as with QAs
(requests and waits for availability and then for
offers, decision for the best offering TA, waits for a
confirmation/rejection). Then, the graph in figure 1
continues with a second part (not shown for lack of
space), with the same structure as the first part. This
guarantees modularity, which is important for
simulation and control. After a confirmation, C
issues a transport command, and the container is
loaded on the vehicle associated to the selected TA.
Then, C starts the negotiation with YAs to stack
the container in an assigned block position. Again,
due to the modularity of the approach, the sequence
of status-values follows the same protocol, and,
finally, if a confirmation is received, C issues a
stacking command and gets back to QUIESC.
C stops interacting and remains quiescent until
the beginning of the next negotiation (if any) for
downloading, consolidating or loading another
container. The associated container is downloaded,
transported and stacked in a block where it waits for
the next destination (a block or a ship). If faults
A DISCRETE-EVENT SYSTEM APPROACH TO MULTI-AGENT DISTRIBUTED CONTROL OF CONTAINER
TERMINALS
303
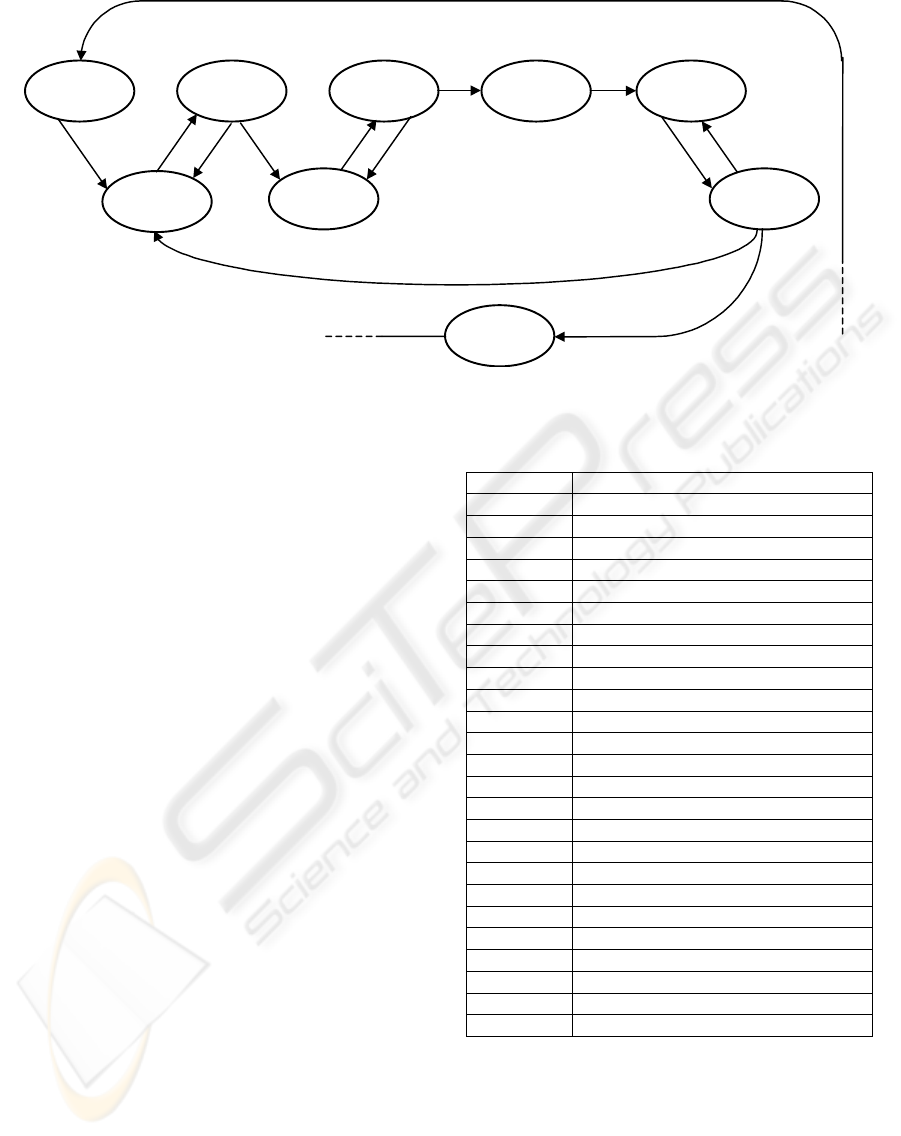
Figure 1: Dynamics of the interaction between a CA when negotiating with QAs.
occur to the selected cranes or trailer, C remains in
QUIESC. Terminal operators restore the normal
operating conditions and the container can be
handled by the selected resources.
3.2 Specification of the DEVS Model of
a Container Agent
We may identify the components of the DEVS
model of a CA, on the basis of the negotiation
mechanism previously described. Table 1 reports the
admissible status-values. Detailed description of
inputs, outputs and internal events is not reported for
lack of space, but it can be easily derived from the
interactions between a CA and QAs, TAs, and YAs.
The sequential state s collects the status-value
and other information i about the CA, which is:
i = ( p, AQ, AT, AY, ta(s) ) (2)
including the current position p of the container (on
ship, picked by quay crane, on trailer, picked by
yard crane, in the yard block); the set AQ of quay
cranes available for the currently negotiated
downloading operations, or the set AT of trailers
available for the currently negotiated transport, or
the set AY of yard cranes available for currently
negotiated stacking tasks; the time ta(s) scheduled in
current state before the next internal event.
The time advance function gives the residual
time ta(s) in state s before the next scheduled
internal invent. E.g., at the time t* of entering a
waiting status, the time-out fixes T
w
, such that
ta(s) = t*+T
w
-t, where t is the current time.
Table 1: Status-values for a Container Agent.
Status Activity Description
QUIESC Agent quiescent
REQQAV Request availability to all QAs
WAIQAV Wait for availability from QAs
REQQSE Request service to available QAs
WAIQOF Wait for offers from available QAs
TAKQDE Take decision for the best QA
COMCHQ Communicate choice to selected QA
WAIQCO Wait conf./reject. from selected QA
DWNLDG Command selected QA to download
REQTAV Request availability to all TAs
WAITAV Wait for availability from TAs
REQTSE Request service to available TAs
WAITOF Wait for offers from available TAs
TAKTDE Take decision for the best TA
COMCHT Communicate choice to selected TA
WAITCO Wait conf./reject. from selected TA
TRANSP Command selected TA to transport
REQYAV Request availability to all YAs
WAIYAV Wait for availability from YAs
REQYSE Request service to available YAs
WAIYOF Wait for offers from available YAs
TAKYDE Take decision for the best YA
COMCHY Communicate choice to selected YA
WAIYCO Wait conf./reject. from selected YA
STCKNG Command selected YA to stack
DEVS models can be also specified for the other
agents, and status-transition diagrams can be defined
for the interactions occurring when agents negotiate
tasks in loading or consolidation processes.
QUIESC
WAIQAV WAIQOF TAKQDE
COMCHQ
Y
C2
REQQAV
Y
C01
…Y
C0q
REQQSE
Y
C11
…Y
C1g
WAIQCO
[t
C0
, t
C1
]
[t
C1
, t
C2
]
[t
C2
, t
C3
]
[t
C3
, t
C4
][t
C4
, t
C5
][t
C5
, t
C6
]
[t
C6
, t
C7
]
X
C0
(t
C0
)
I
C1
(t
C1
)
I
C2
(t
C2
)
X
C1
/
I
C3
(t
C2
)
I
C4
(t
C3
)
I
C5
(t
C4
)
X
C2
/ I
C6
(t
C4
)
I
C7
(t
C5
)
I
C8
(t
C6
)
X
C3
/ I
C9
(t
C7
)
X
C4
/ I
C10
(t
C7
)
I
C11
(t
C8
)
X
C5
(t
C7
)
[t
C7
, t
C8
]
DWNLDG
Y
C3
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
304

4 IDEAS FOR SIMULATING MAS
The DEVS atomic models can be integrated in a
network, which can be used as a platform for
simulating the MAS controlling a terminal, e.g. the
Taranto Container Terminal (TCT).
In this context, it is possible to simulate not only
the dynamics of terminal activities, the flow of
containers, and the utilization of terminal resources
(cranes, trailers, human operators, etc.), but also the
efficiency of the MAS and its agents (flow of event
messages, status transitions, waiting loops, etc.).
Then, two types of performance indices can be
defined. Namely, it is possible to measure
conventional indices: the total number of (imported,
exported, transshipped) containers; the average
throughput, during downloading (from ship to yard)
or loading (from yard to ship) processes; the average
lateness of containers in the terminal. Moreover, it is
possible to measure the behaviour of the MAS and
the efficiency of the agents' decision policies by
means of: the average number of requests for each
negotiation; the number of loops of status-values
before a final decision is taken by a CA, expressed
in percentile terms with respect to the total number
of operations executed by every CA.
The performance measures can be evaluated both
in steady-state operating conditions and in perturbed
conditions. Perturbations may arise from: hardware
faults or malfunctions; abrupt increase/decrease of
maritime traffic volumes; sudden increase/reduction
of yard space; traffic congestion of trailers;
congestion, delays, message losses, and faults in the
communication between agents.
Then, it is important to measure robustness of
agents' decision laws, to see how they dynamically
react to disturbances and parameter variations, and
eventually to adapt them. The adaptation aims to
make the autonomous agents learn the most
appropriate decision laws in all terminal conditions.
To conclude, the simulation platform will allow
to compare control architectures defined by:
a static MAS in which CAs use heuristic
decision parameters (estimated time of the
requested task, distance of cranes or trailers);
a dynamic MAS in which CAs take decisions
by fuzzy weighted combinations of heuristic
decision criteria; the weights can be adapted
by an evolutionary genetic algorithm.
5 CONCLUSIONS
This paper proposes a MAS architecture for
controlling operations in intermodal container
terminal systems. The autonomous agents are
represented as atomic DEVS components. The
interactions between agents are modelled according
to the DEVS formalism to represent negotiations for
tasks when downloading containers from ship to
yard stacking area. The developed model can be
easily extended to describe other processes (loading
containers from yard area to ships, redistributing
containers in the yard area).
The DEVS model of the MAS can be used in a
detailed simulation environment of the TCT, which
allows to measure standard terminal performance
indices and the efficiency of the MAS. Moreover,
open issues are testing and comparing static MAS
and dynamically adapted MAS, if evolutionary
adaptation mechanisms are used.
REFERENCES
Crainic, G., Gendreau, M., Dejax, P., 1993. Dynamic and
stochastic models for the allocation of empty
containers. Oper. Research, Vol. 41, pp. 102-126.
Gambardella, L.M., Rizzoli, A.E., Zaffalon, M., 1998.
Simulation and planning of an intermodal container
terminal. Simulation, Vol. 71, No. 2, pp. 107-116.
Heragu, S.S., Graves, R.J., Kim, B.-I., Onge, A.St., 2002.
Intelligent Agent Based Framework for Manufacturing
Systems Control. IEEE Trans. Sys., Man, and Cyber. -
Part A, Vol. 32, No. 5.
Hsieh, F.-S., 2004. Model and control holonic
manufacturing systems based on fusion of contract
nets and Petri nets. Automatica, 40, pp. 51-57.
Huhns, M.N., Stephens, L.M., 2001. Automating supply
chains. IEEE Int. Comput., Vol. 5, No. 4, pp. 90-93.
Lin, F., Norrie, D.H., 2001. Schema-based conversation
modeling for agent-oriented manufacturing systems.
Computers in Industry, Vol. 46, pp. 259-274.
Logan, B., Theodoropoulos, G., 2001. The distributed
Simulation of Multiagent systems. Proceedings of the
IEEE, Vol. 89, No.2, pp. 174-185.
Shattenberg, B., Uhrmacher, A.M., 2001. Planning Agents
in James. Proc. of the IEEE, Vol. 89, No. 2, pp. 158-
173.
Vis, I.F.A., De Koster, R., 2003. Transshipment of
containers at a container terminal: An overview.
Europ. Jour. of Oper. Research, Vol. 147, pp. 1-16.
Zeigler, B.P., Praehofer, H., Kim, T.G., 2000. Theory of
Modelling and Simulation, Academic Press. New
York, 2
nd
ed..
A DISCRETE-EVENT SYSTEM APPROACH TO MULTI-AGENT DISTRIBUTED CONTROL OF CONTAINER
TERMINALS
305
