
A Hybrid Dynamic Task Allocation Approach for a
Heterogeneous Multi-Robot System
Yan Meng and Kashyap Shah
Department of Electrical and Computer Engineering
Stevens Institute of Technology, Hoboken, NJ 07030, USA
Abstract. In this paper, we propose a communication-efficient hybrid task
scheduling algorithm for a heterogeneous multi-robot system under dynamic
unknown environment, where each robot makes its own decision through com-
municating with others as well as checking a global task status queue. The pro-
posed hybrid algorithm takes advantage of centralized approaches to improve
the overall system efficiency and distributed approaches to reduce the commu-
nication overhead, which automatically leads to a reasonable reduction of
power consumption. This algorithm avoids unnecessary communication by
broadcasting global information which is in everybody’s interest and mean-
while limits specific information which is in interest of some specific robots
only. In addition, each robot would dynamically allocate the task to robots
which are capable and most available. This feature makes the system robust
against communication failures and robot failures. Simulation results demon-
strate the efficiency and robustness of the proposed approach.
1 Introduction
With growing need of building reliable real-time applications coupled with advance-
ment of high-speed networks and high-performance computers, in the past decade
heterogeneous multi-robot systems have been increasingly used for many real-time
applications, like urban search and rescue, surveillance, hazardous materials detec-
tion, and reconnaissance, in which the correctness of the systems depend not only on
the results of a computation, but also on the time which these results are produced [1].
To achieve real-time performance of such a complex system, an efficient task alloca-
tion and coordination among the team members is required. Vali Veloso stated in [2]
that team performance can be drastically increased if the team coordinates well and
the information is being shared by all teammates in a multi-robot environment.
Dynamic task allocation for multi-robot systems under dynamic environment is a
challenging problem, which aims to efficiently finish all of unknown tasks as fast as
possible while keep the cost as low as possible. Although some algorithms have been
proposed to tackle this problem, such as auction-based algorithm like MURDOCH
[3][4], behavior-based algorithm like ALLIANCE [5][6], and instantaneous greedy
scheduler based approaches, all of these available methods have a great deal of
broadcast communication overhead to share information with all of team members.
Meng Y. and Shah K. (2007).
A Hybrid Dynamic Task Allocation Approach for a Heterogeneous Multi-Robot System.
In Proceedings of the 3rd International Workshop on Multi-Agent Robotic Systems, pages 3-13
Copyright
c
SciTePress

Some of available algorithms are only good for a homogeneous robot team with one
global task like mapping or exploration of an area, and some of them don’t take con-
sideration of system robustness in the case of communication failure or robot mal-
functions.
In this paper, we aim at investigating a task scheduling algorithm for a heteroge-
neous multi-robot system under dynamic unknown environment. As we know, a cen-
tralized approach consists of making all decisions in one place, where all the tasks to
be performed are collected by a central scheduler. This centralized scheduler decom-
poses tasks into programs of actions, order actions when necessary and assigns them
to robots with respect to their capabilities, work loads, and locations. The centralized
approach is efficient with small number of agents, but its performance would be de-
graded significantly in a large-scale team. Furthermore, centralized approaches are
not appropriate for coordinating the action of multiple robots in a dynamic unknown
environment where unforeseeable events may occur.
On the other hand, in a decentralized approach, each robot makes its own deci-
sions for a particular set of tasks. No central unit is needed. Some initial decomposi-
tion of the global scheduling may be imposed and robots can negotiate with others to
make the best of coordination and solve conflicts dynamically. Furthermore, to im-
prove the system robustness, error handling and system recovery are critical issues.
According to Dias and Zink [7], in a multi-robot environment, system failure can
occur in three different ways: (1) communication failure; (2) partial robot malfunc-
tioning; and (3) robot death. The scheduling algorithm should take these situations
into consideration.
Based on the above observation, we propose a hybrid task scheduling algorithm,
where each robot makes its own decision through communicating with others as well
as checking a global status queue to improve the coordination efficiency. This algo-
rithm avoids unnecessary communication by broadcasting global information which
is in everybody’s interest and meanwhile limits specific information which is in inter-
est of some specific robots only. Therefore, the proposed algorithm takes advantage
of centralized approaches to improve the overall efficiency and distributed ap-
proaches to reduce the communication overhead. To improve the system robustness
under dynamic environment, instead of making each robot to adapt to some unex-
pected tasks which may be beyond its own capability due to changed environment,
the robot would send help signals to those who can handle the tasks. In addition, by
tracking the communication signal that it has sent and expected to receive, each robot
would dynamically allocate the tasks to robots which are capable and most available.
This feature makes the system robust against communication failures and robot fail-
ures.
The paper is organized as follows. Section II introduces background and related
work in the field of task allocation algorithms for multi-robot systems. Section III
describes the problem statement. Section IV proposes a real-time dynamic task allo-
cation algorithm for heterogeneous multi-robot systems. Extensive simulation results
are discussed in Section V. The paper is concluded by Section VI.
4

2 Related Work
Increasing amounts of research have been conducted in the area of dynamic task
scheduling for multi-robot systems. One of the easiest approaches to work in dynamic
task assignment is trial and error method, where all robots will try the same task one
by one until the perfect match is found. This method is very inefficient and time
consuming. James McLurkin [8] proposed three different methods of task assignment
in robot swarms: random-choice algorithm, which is extremely communication exten-
sive and inefficient, card-dealer’s algorithm, which assigns tasks to individual robots
sequentially, using minimal communications but a great deal of time, and tree-recolor
algorithm, which is a compromise between extreme-communication and card-
dealer’s, balancing communications use and running time.
Ashely and Ramprasad [9] proposed a behavior-based planning algorithm for
multi-robot systems, where each robot predicts the behavior of its companion and
proceeds for further steps. The main idea of this method is that the robot should not
try to adapt to the situation but instead should directly transfer that task to an associ-
ated robot who can handle that situation. Brumitt and Stentz [10] proposed a dynamic
mission planning for multi-robot systems in a dynamic environment, where the plan-
ning system dynamically reassign robots to goals in order to continually minimize the
time to complete the mission. Trade-offs between robot’s traveling cost and running
cost of mission planner has to be balanced. Smith and Davis [11] proposed a contract
net protocol, where the collection of nodes (robot) can be represented as a contract
net. There are many auction based methods available for handling dynamic task allo-
cation and MURDOCH [3][4] is a popular one among them, which uses contract net
protocol as its communication protocol. Generally, distributed systems rely on fitness
based actions and negotiation protocols. MURDOCH uses publish/subscribe messag-
ing for distributed control of multi-robot systems.
A task-assignment architecture was proposed in [12] for cooperative transport by
multiple mobile robots in an unknown static environment, which consists of two real-
time planners: a priority-based task-assignment planner and motion planners based on
short-time estimate. This method is also compared with Stillwell’s algorithm in [13],
where homogenous robots are ant like objects who try to move a big piece of food
from one place to their nest. Each of them tries to contribute in the most efficient
way. The scheduler proposed in [14] is one example of greedy decentralized schedul-
ers. Generally, these kinds of co-operative search approaches are efficient and robust
in applications like military scouting and automatic trash collection. A novel emotion-
based recruitment approach was proposed in [15] for a multi-robot task allocation
problem. Affective recruitment is tolerant of unreliable communication channels, and
can find better solutions than simple greedy schedulers.
3 Problem Statement
A simplified proof-of-concept task environment, as shown in Fig. 1, is divided into 3
different sub-areas: high-pressure sub-area, intensive-light sub-area, and smoking
sub-area. Different types of robots are defined based on their capabilities. For exam-
5

ple, P type robot, which is only capable of working in high-pressure subarea, but not
the other two subareas. Here P stands for pressure. Similar definitions are applied to
L type robot and S type robot. Some robots may have capabilities suitable for multiple
sub-areas, such as PS type or LS type. In order to implement the assigned missions in
a more efficient manner, task preemption is not allowed among the robots in the pro-
posed task allocation approach. It is assumed that robots are autonomous, are able to
localize themselves within the environment, can avoid obstacles and plan path to a
destination.
Consider that we have N heterogeneous robots and M different tasks randomly
distributed in different sub-areas. Here task is a conceptual terminology, which can
be defined as various physical jobs, such as trash can collection, de-mining, transpor-
tation, construction, or assembling. The robots are expected to move to the position
where the tasks are located and process the task. The environment can be as simple
as Fig, 1(a) 1 or as complex as Fig. 1(b), which is unknown to robots. However, it is
assumed that each robot has on-board sensors capable of detecting different subareas.
Initially, if some predefined tasks have been stored in a robot, it will move to those
tasks. If no predefined task exists, robots would randomly move around to search for
the tasks in the environment. The requirement of these tasks may be changed due to
dynamic environment. The objective of this project is to develop an efficient task
scheduling algorithm among heterogeneous robots under dynamic environment so
that all of the tasks would be completed as soon as possible meanwhile cost (i.e.
power consumption) can be reduced as low as possible.
(a) (b)
Fig. 1. Possible task environments.
4 A Hybrid Approach
To tackle this scheduling problem, a hybrid centralized and decentralized method is
proposed, where each robot makes its own decision, communicates with others to
share task information, as well as to check a global task status queue to improve the
coordination efficiency. The architecture of the approach is shown in Fig. 2.
6
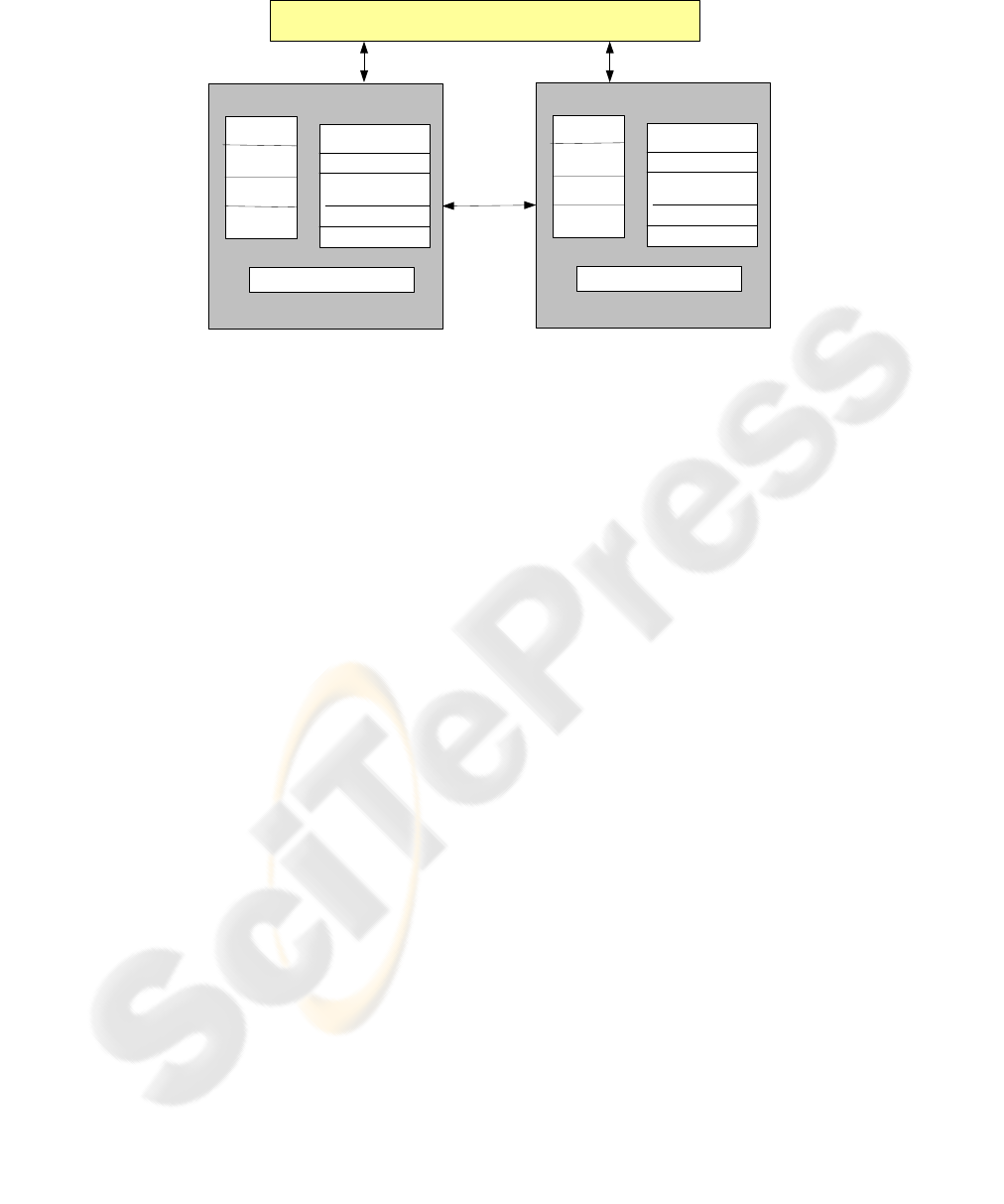
Fig. 2. The architecture of the hybrid approach.
Each robot has a local database to keep all the information it required to make de-
cisions. This database structure, as shown in Fig.2, includes three major parts: robot
parameters, task parameters, and local task queues. Robot parameters consist of robot
ID, capability vectors of all robots, current locations of all robots relative to a refer-
ence coordinate system, status of all robots, locations of all tasks. Task parameters
consist of task ID, task requirement, task status, and task timer.
Robot ID is a unique identification number for each robot. Capability is robot’s
ability to perform a task, which is a combination of different sub-areas represented by
a capability vector. Robot status consists of free (its local task queue is empty), busy
(some tasks are in its local task queue), or failed. Task ID is represented by its physi-
cal location in a reference coordinate. Task requirements depend on the sub-area
where the task located. Task status shows whether the task is in progress, completed,
in-trouble, or time-out. Task timer is used to track how long the task has been proc-
essed. To prevent the system to be hanged by one task forever, if the processing time
is greater than a predefined threshold, time-out status would be labeled on the task.
Local task queue keeps a list of tasks a robot will perform sequentially. These
tasks may be some predefined tasks before the system starts, or tasks detected or
reassigned on the fly. Once the robot finishes its first task in its task queue, it would
remove the finished task and go to next one until the last task in the queue. Once this
queue becomes empty, robot will start moving randomly to search for a new task.
Since it is difficult to predict all tasks in advance, some predefined tasks may not be
appropriate for a robot anymore under dynamic environment. If a robot finds out that
it is difficult for it to process a task in its local queue during execution, it would send
help request to those robots whose capabilities match the task requirement. If help
responses are received, the robot will assign the task to the responded robot, and
delete it from its local queue. Meanwhile the responded robot would add that task in
its local queue.
Global task status queue is a queue in which robot keeps the information about all
tasks being processed or completed. The main purpose of this global task status queue
is to prevent any unnecessary redundancy among robots to process the same task.
Global task status queue
Local task queue
Task parameters
Task ID
requirement
status
timer
Robot
parameters
Robot ID
Capability
current location
status
location of tasks
Check and updateCheck and update
Communication
signal
Local task queue
Task ID
requirement
status
timer
Robot
parameters
current location
status
Robot ID
Capability
location of tasks
Robot 1
Robot 2
7

This global queue will be updated by all robots whenever task status has been
changed.
Initially, all robots move around randomly in the environment searching for tasks.
When a robot detects a task, it checks the requirements of the task first. If the re-
quirements of the task match with its own capability, then the robot would perform
the task and update the global task status queue. When a robot completes a task, it
would update the global task status queue about its current task state. The states of a
task include beginning, completion, in-trouble, and time-out. This global status of
tasks is stored in the global task status queue for all robots. Whenever a robot needs
help, it only broadcasts helps to those capable robots instead of everyone. Here a
trade-off between memory capacity of robots and communication overhead among
robots has to be made. The system stops when the global task status queue is filled up
with all tasks with status of completion.
If multiple robots respond to the help requesting signal, the helper needs to make
decision which robot to pick. On the other hand, if a robot was selected by more than
one helper, it also need to make decision which task to select (if more than one re-
sponded robots) or which task to put into its local task queue first (if only one robot
can do these tasks). A fitness function is required for this decision making. Here, a
auction-based method is applied, which is defined as follows:
.,...,2,1,,...,2,1,
)()|(
),,( MjNi
d
nftcf
kdscF
i
iji
iii
=== (1)
Where
ii
dc , and
i
n represent the capability, distance from the current task location,
and number of tasks in local queue of robot i, respectively.
j
t
represents the task
types, and k is a scale factor.
)|(
ji
tcf
is a matching function of the capability of
robot i related to the type of task j, which is defined as follows:
⎩
⎨
⎧
=
otherwise ,0
task type thematches capabilityrobot theif ,1
)|(
ji
tcf .
And
)(
i
nf is defined as follows:
⎩
⎨
⎧
=
=
otherwise ,/1
0 if ,1
)(
n
n
nf
i
In other words, if all of the responding robots are busy, the numbers of tasks in
their local task queues are compared. The smaller the task number in queue, the
higher the possibility of the corresponding robot would be selected as the helper.
Since robots need share task information with others, a specific communicate pro-
tocol is required for this application. Basically, four types of signal frames are de-
fined in the communication protocol, (1) help requesting signal frame; (2) help re-
sponding signal frame; (3) help accepting signal frame; and (4) global task updating
signal frame. The detailed frame definitions are shown in Fig. 3. When a help seek-
ing robot receives help responding signal, it would send help accepting signal back to
the selected robot. If responder robot is busy at that time, it would add that task in its
local task queue and continue working on its current task. Global task updating sig-
nal is used to update the global task queue.
8
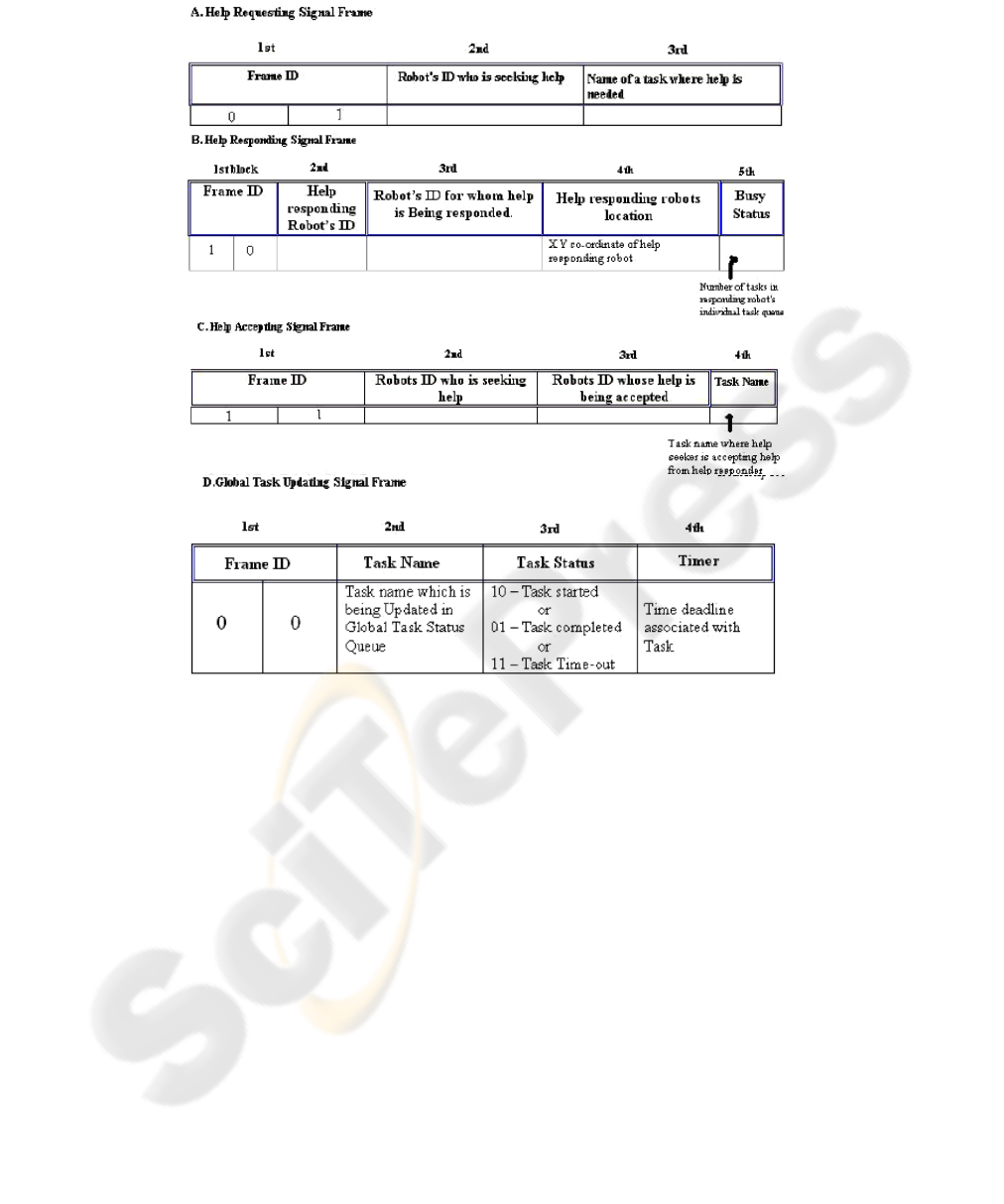
Fig. 3. Communication protocols among robots.
5 Simulation Results
To evaluate the proposed algorithm, a simulator is developed using C/C++ language
under Windows environment, and a snapshot of the simulation screen is shown in
Fig. 4. Six robots are employed in the simulation including 2 P-type (represented as
Rp1 and Rp2), 2 L-type (RL1 and RL2), and 2 S-Type (Rs1 and Rs2). Eight tasks are
generated, which are represented by the location coordinate within a reference frame.
T1(X1,Y1), T2(X2,Y2) and T3(X3,Y3) are in high-pressure sub-area, T4(X4,Y4),
T5(X5,Y5) and T6(X6,Y6) in smoking sub-area, and T7(X7,Y7) and T8(X8,Y8) in
intensive-light sub-area. The local task queue is located on top-left, and the global
task status queue is listed on top-right. The bottom-left part indicates the communica-
tion signals sent or received by robots. Various geometric shapes in the task environ-
ment represent static obstacles.
9

Fig. 4. A snapshot of the simulation screen.
Most task allocation problems among robots have applied group-wide broadcast
communication to share the information and negotiate with team members. This kind
of broadcast communication usually requires more communication overhead, power,
time and cost, especially for a heterogeneous team where only some specific members
can conduct specific types of tasks, not all of them. In our algorithm, instead of
broadcast to everyone, the help information is only broadcasted to those which have
the capability for the task. The communication cost comparison results are shown in
Fig. 5, where the communication cost of our approach (i.e. 23 times) has been signifi-
cantly reduced compared with the group-wide broadcasting method (i.e., 35 times).
Communication overhead is directly proportional to task processing time and power
consumption. In other words, our approach would be more power efficient and spend
less time to finish the tasks than the group-wide broadcasting method. For this simple
example with 6 robots and 8 tasks, the time required to finish all tasks are shown in
Fig. 5(c).
A simple auction-based method using broadcasting is applied for comparison,
where robots randomly search for tasks and broadcast the task information to all team
members. If one robot needs help and more than one response received, the robot
which is closest to the task will be selected. Four cases of different task distributions
are designed in the simulation, where 8 task locations are re-distributed in different
cases. The time required to finish all tasks under different task configuration cases are
recorded and shown in Fig. 6. The proposed algorithm obviously outperforms the
random searching one. The proposed method selects the helper robot not only de-
pends on its current distance to the task, but also its current status. If there is a long
list of tasks in its local task queue of a robot, even if it is closest one to the task, it
may end up selecting other robot with a much shorter list of tasks in local queue.
10


6 Conclusions and Future Work
In this paper, a hybrid task scheduling approach has been proposed, which signifi-
cantly reduces communication overhead while improving the overall system perform-
ance through dynamic task allocation. This algorithm avoids unnecessary communi-
cation by broadcasting global information which is in everybody’s interest and mean-
while limits specific information which is in interest of some specific robots only.
Each robot would dynamically allocate a task which is difficult for itself to other
capable and most available robots, and keeps tracking the help requests, which makes
the system robust against communication failures and robot failures. Simulation re-
sults show robot communication overhead can be significantly reduced, which auto-
matically leads to reduction of power consumption and time consumption. In our
future work, more dynamic situations will be considered, such as malicious agents,
dynamically adding to or removing agents from the current team, global update fail-
ures. Furthermore, the method will be implemented to a real-world multi-robot sys-
tem, where robot dynamics, kinematics, robot-robot interaction and sensors would
have to be considered.
References
1. W. A. Halang, R. Gumzej, M. Colnaric, and M. Druzovec, “Measuring the performance of
real-time systems”, Journal of Real-Time Systems, 2000, 18(1):59-68.
2. Vail and Veloso, “Dynamic multi-robot coordination,” Multi- Robot Systems: From
Swarms to Intelligent Automata, vol. II, pp. 87–100, 2003.
3. B. Gerkey and M. J. Mataric, “Murdoch: Publish/subscribe task allocation for heterogene-
ous agents,” Proceedings of Autonomous Agents, Barcelona, Spain, June 3-7, pp. 203–204,
2000.
4. D. Rus, S. Singh, S.-V. B. Heidelberg, B. P. Gerkey., and M. J. Matarik, “Principal com-
munication for multi robot task allocation,” Experimental Robotics VII, LNCIS, pp. 353–
362, 2001.
5. L. E. Parker, “Alliance: An architecture for fault tolerant multirobot cooperation,” IEEE
Trans. Robot. Automat, vol. 14, p. 220240, Apr 1997.
6. L. E. Parker, “Task-oriented multi-robot learning in behavior-based systems,” Proceedings
of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 1996.
7. M. B. Dias, M. Zinck, R. Zlot, and A. Stentz, “Robust multirobot coordination in dynamic
environments,” Proceeding on DIAS,.2004.
8. J. McLurkin and D. Yamins, “Dynamic task assignment in robot swarms,”IEEE Proceed-
ings of Robotics: Science and Systems, June 2005. MIT Computer Science and Artificial
Intelligence Lab.
9. A. W. Stroupe, R. Ravichandran, and T. Balch, “Value-based action selection for explora-
tion and dynamic target observation with robot teams,” Proceedings of the IEEE Confer-
ence on Robotics and Automation, 2004.
10. B. Brumitt and A. Stentz, “Dynamic mission planning for multiple mobile robots,” Pro-
ceedings of the IEEE International Conference on Robotics and Automation, 1996.
11. R. Davis and R. G. Smith, “Negotiation as a metaphor for distributedo,” Conf. Artificial
Intelligence Laboratory, Massachusetts Institute, of Technology, Cambridge, MA 02139,
ETATS-UNIS, vol. 20, no. 1, p. 63109, 1993.
12

12. N. Miyata, J. Ota, T. Arai, and H. Asama, “Cooperative transport by multiple mobile robots
in unknown static environments associated with real-time task assignment,” IEEE transac-
tions on robotics and automation, vol. 18, no. 5, 2002.
13. D. J. Stilwell and J. S. Bay, “Toward the development of a material transport system using
swarms of ant-like robots,” Proc. IEEE Int. Conf. Robotics and Automation, pp. 766-771,
1993.
14. C. Hsieh and R. Murray, “Experimental implementation of an algorithm for cooperative
searching of target sites,” Proceedings of American Control Conference, 2005.
15. A. Gage, D. R. Murphy, D. K. Valavanis, and M. Long, “Affective task allocation for
distributed multi-robot teams,” Center for Robot-Assisted Search and Rescue (CRASAR),
TR2006-26.
13
