
VEHICLE MODELS AND ESTIMATION OF CONTACT FORCES
AND TIRE ROAD FRICTION
Nacer K. M’Sirdi
LSIS, CNRS UMR 6168. Dom. Univ. St Jrme, Av. Escadrille Normandie - Niemen 13397, Marseille Cedex 20, France
Abdelhamid Rabhi
C.R.E.A, 7 Rue du Moulin Neuf, 80000 Amiens, France
Aziz Naamane
LSIS, CNRS UMR 6168. Dom. Univ. St Jrme, Av. Escadrille Normandie - Niemen 13397, Marseille Cedex 20, France
Keywords:
Vehicle dynamics, Sliding Modes observer, Robust nonlinear observers, tire forces estimation.
Abstract:
In this paper a 16 DoF vehicle model is presented and discussed. Then some partial models are considered
and justified for the design of robust estimators using sliding mode approach in order to identify the tire-
road friction or input variables. The estimations produced are based on split system equations in as cascaded
observers and estimators. The first produces estimations of vehicle states.
1 INTRODUCTION
In recent years, the increasing demand for the safety
in car vehicles has promoted research and develop-
ment of the technology of active safety. However
more and more new active safety systems are devel-
oped and installed on vehicles for real-time monitor-
ing and observers for controlling the dynamic stability
(EBS, ABS, ESP).
Car accidents occur for several reasons which may
involve the driver or vehicle components or environ-
ment. Such situations appears when the vehicle is
driven beyond the adherence or stability limits. One
of the important factors determining vehicle dynam-
ics including safety is road friction and the tire forces
(ground-vehicle interactions). In general partial and
approximated models are used. They are not fully jus-
tified and their validity is often limited. In this work
we try to highlight some of the approximations made
and give some details allowing to evaluate what is re-
ally neglected.
Robust observers looking forward are based on
the physics of interacting systems (the vehicle, the
driver and the road). However, tire forces and road
friction are difficult to measure directly and to repre-
sent precisely by some deterministic model equations.
In the literature, their values are often deduced by
some experimentally approximated models (Gustafs-
son). The knowledge of tire parameters and variables
(forces, velocities, wheel and slip), tire forces is es-
sential to advanced vehicle control systems such as
anti-lock braking systems (ABS), traction control sys-
tems (TCS) and electronic stability program (Acker-
mann)(Msirdi04)(Canudas03). Recently, many ana-
lytical and experimental studies have been performed
on estimation of the frictions and contact forces be-
tween tires and road.
We focus our work, as presented in this paper, first
on modeling and second on on-line estimation of the
tires forces (Ackermann)(Msirdi04). We estimate the
vehicle state and identify tire forces ((Msirdi03)). The
main contribution is the emphasize of the rational be-
hind partial approximated models and the on-line es-
timation of the tire force needed for control.
Tire forces can be represented by the nonlinear
(stochastic) functions of wheel slip. The determin-
istic tire models encountered are complex and de-
pend on several factors (as load, tire pressure, en-
vironmental characteristics, etc.). This makes on
line estimation of forces and parameters difficult for
vehicle control applications and detection and diag-
nosis for driving monitoring and surveillance. In
(Drakunov)(Canudas03), application of sliding mode
control is proposed. Observers based on the sliding
mode approach have been also used in (Rabhi04).
351
K. M’Sirdi N., Rabhi A. and Naamane A. (2007).
VEHICLE MODELS AND ESTIMATION OF CONTACT FORCES AND TIRE ROAD FRICTION.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 351-358
DOI: 10.5220/0001636403510358
Copyright
c
SciTePress
In (Ray) an estimation method is based on the least
squares algorithm and combined with a Kalman filter
to estimate the contact forces. The paper of (Gustafs-
son) presents an estimation of tire/road frictions by
means of a Kalman filter. It gives relevant estimates
of the slope of µ versus slip (λ). In (Carlson) esti-
mations of longitudinal stiffness and wheel effective
radius are proposed using vehicle sensors and a GPS
for low values of the slip.
Robust observers with unknown inputs have been
shown to be efficient for estimation of road pro-
file (Imine) and for estimation of the contact forces
(Msirdi04)(Rabhi04). Tracking and braking control
reduce wheel slip. This can be done also by means of
its regulation while using sliding mode approach for
observation and control.(Msirdi04)(Rabhi04). This
enhances the road safety leading better vehicle ad-
herence and maneuvers ability. The vehicle control-
lability in its environment along the road admissible
trajectories remain an important open research prob-
lem.
The proposed estimation procedure has to be ro-
bust enough to avoid model complexity. It can then
be used to detect some critical driving situations in
order to improve the security. This approach can be
used also in several vehicle control systems such as
Anti-look Brake Systems (ABS), traction control sys-
tem (TCS), diagnosis systems, etc... The main char-
acteristics of the vehicle longitudinal dynamics were
taken into account in the developed model used to de-
sign robust observer and estimations. The estimations
are produced using only the angular wheel position
as measurement by the specially designed robust ob-
server based on the super-twisting second-order slid-
ing mode. The proposed estimation method is veri-
fied through simulation of one- wheel model (with a
”Magic formula” as tire model). In a second step of
validation we present some application results (on a
Peugeot 406) showing an excellent reconstruction of
the velocities, tire forces and estimation of wheel ra-
dius.
2 VEHICLE MODELING
2.1 Complete 16 DoF Model
In literature, many studies deal with vehicle model-
ing (Kien)(Ramirez)(Mendoza). This kind of systems
are complex and nonlinear composed with many cou-
pled subsystems: wheels, motor and system of brak-
ing, suspensions, steering, more and more inboard
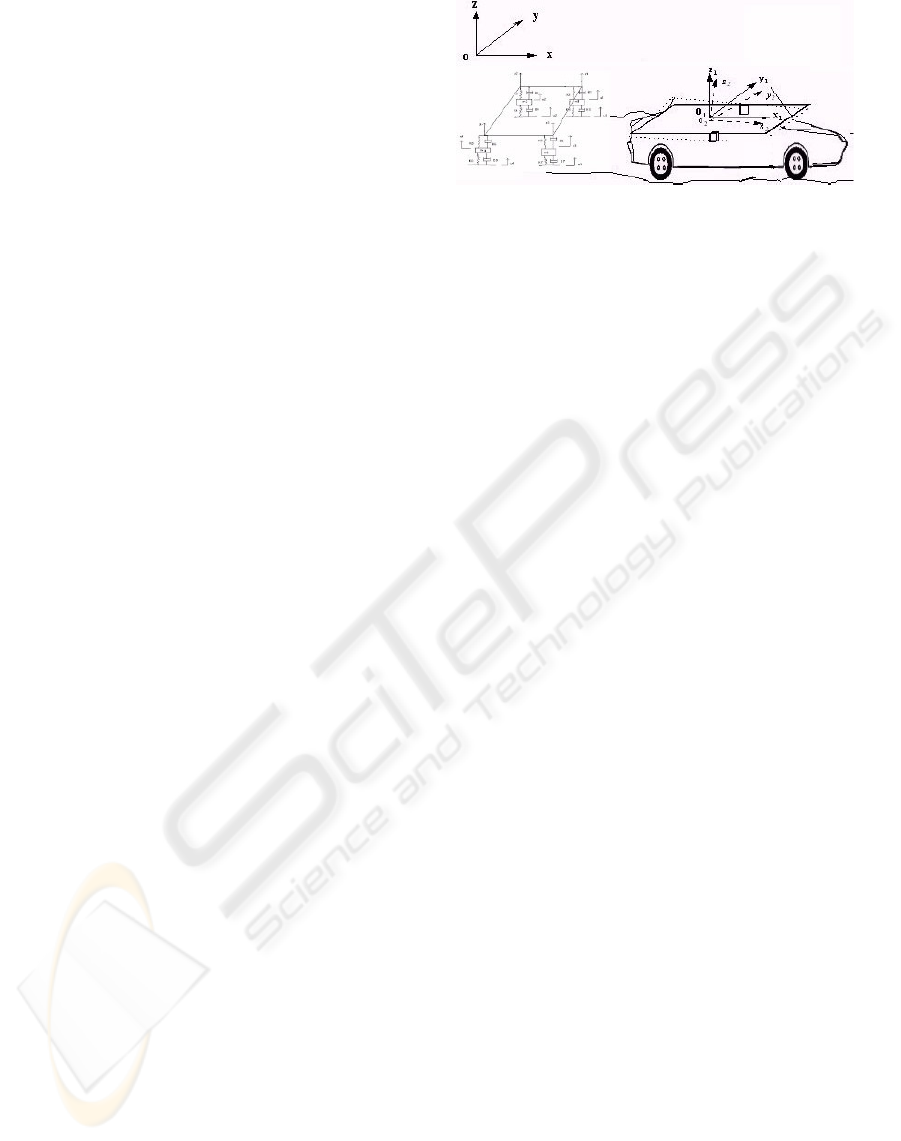
and imbedded electronics. Let us represent the ve-
hicle (like eg a Peugeot 406) by the scheme of figure
Figure 1: Vehicle dynamics and reference frames.
1 and define the following notations.
The vehicle body receives as excitations external
forces and moments following the three axes: - Lon-
gitudinal, - Lateral, - Vertical. These come from in-
teraction of the wheels and road, from perturbations
(wind for example), gravity and vehicle drive line. Let
us consider the basic reference fixed frame R. We can
consider the vehicle as made of 5 sub-systems: chas-
sis whit 6 DoF and then 4 wheels with their suspen-
sions. Each of the rear wheels has 2 DoF. The front
ones are driven wheels with 3 DoF each. Then we
have 16 DoF. Let the generalized variables be in the
vector q ∈ R
16
, defined as
q
T
=[x, y, z, θ
z
, θ
y
, θ
x
, z
1
, z
2
, z
3
, z
4
, δ
3
, δ
4
, ϕ
1
, ϕ
2
, ϕ
3
, ϕ
4
]
where x, y, et z represent displacements in longitu-
dinal, lateral and vertical direction. angles of roll,
pitch and yaw are θ
x
, θ
y
et θ
z
respectively. The
suspensions elongations are noted z
i
: (i = 1..4). δ
i
:
stands for the steering angles (for wheels numbered
as i = 3, 4), finally ϕ
i
: are angles wheels rotations
(i = 1..4.). Vectors ˙q, ¨q ∈ R
16
are respectively veloci-
ties and corresponding accelerations. M(q) is the in-
ertia matrix and C(q, ˙q) ˙q are coriolis and centrifugal
forces. The gravity term is G . Suspensions forces
are V (q, ˙q) = K
v
˙q + K
p
q with respectively damping
and stiffness matrices K
v
, K
p
. We can define as dy-
namic equations of the vehicle by applying the prin-
ciples fundamental of the dynamics (see (Beurier)):
Γ + J
T
F = M
..
q +C(q,
.
q)
.
q + Kq + G (1)
with as parameters only to give an idea
M =
¯
M
1,1
¯
M
1,2
¯
M
1,3
0 0
¯
M
2,1
¯
M
2,2
¯
M
2,3
¯
M
2,4
¯
M
2,5
¯
M
3,1
¯
M
3,2
¯
M
3,3
0 0
0
¯
M
4,2
0
¯
M
4,4
0
0
¯
M
5,2
0 0
¯
M
5,5
C =
0
¯
C
12
¯
C
13
0 0
0
¯
C
22
¯
C
23
¯
C
24
¯
C
25
0
¯
C
32
¯
C
33
0 0
0
¯
C
42
0 0 0
0
¯
C
52
0 0
¯
C
55
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
352

and J
T
=
J
1,1
J
1,2
J
1,3
J
1,4
J
2,1
J
2,2
J
2,3
J
2,4
J
3,1
J
3,2
J
3,3
0
0 0 0 J
4,4
0 0 0 0
0 0 0 0
.
This is just to show that we can decompose our
system as coupled subsystems. Let us say five cou-
pled subsystems, that we have considered in our pre-
vious works. This has been computed using a sym-
bolic computation software considering 16 general-
ized variables: 6 for position and orientation of body,
4 as suspensions ones, 2 for front wheels steering and
4 as wheels rotations. The matrices M, C and K are
of dimensions 16 × 16. F is input forces vector acting
on wheels, it has 12 components(3 forces ( longitu-
dinal, lateral and normal) × 4 wheels), Γ represent
extra inputs for perturbations.. In the following ap-
plication this model has been reduced and simplified
assuming as nominal behavior a normal driving situ-
ation (Msirdi03).
2.2 Coupled Sub Models
We can split the previous model, without approxima-
tions, in five parts as follows. This leads us to the
body’s translations dynamics:
F
LT
F
T T
F
NT
=
¯
M
11
..
x
..
y
..
z
+
¯
M
12
..
q
4
..
q
5
..
q
6
+ (2)
+
¯
M
13
..
q
11
..
q
21
..
q
31
..
q
41
+
¯
C
12
.
q
4
.
q
5
.
q
6
(3)
Rotations and orientation motions of the body:
J
4F
J
5F
J
6F
=
¯
M
T
12
..
q
1
..
q
2
..
q
3
+
¯
M
22
..
q
4
..
q
5
..
q
6
+
+
¯
M
23
..
q
11
..
q
21
..
q
31
..
q
41
+
¯
M
24
..
q
12
..
q
22
..
q
32
+
¯
M
25
..
q
42
..
q
33
..
q
43
+
+
¯
C
22
.
q
4
.
q
5
.
q
6
+
¯
C
23
.
q
11
.
q
21
.
q
31
.
q
41
+
+
¯
C
24
.
q
12
.
q
22
.
q
32
+
¯
C
25
.
q
42
.
q
33
.
q
43
Suspensions dynamics:
J
7F
J
8F
J
9F
J
10F
=
¯
M
1,3
..
q
1
..
q
2
..
q
3
+
¯
M
2,3
..
q
4
..
q
5
..
q
6
+
+
¯
M
3,3
..
q
11
..
q
21
..
q
31
..
q
41
+
¯
C
32
.
q
4
.
q
5
.
q
6
+
¯
C
33
.
q
11
.
q
21
.
q
31
.
q
41
+
+
R
11
R
21
R
31
R
41
q
11
q
21
q
31
q
41
+
G
7
G
8
G
9
G
10
(4)
The previous 16 DoF model is then equivalent to:
F
T
F
2
F
3
0
U
5
= M
..
ξ
1
..
ξ
2
..
ξ
3
..
ξ
4
..
ξ
5
+C
.
ξ
1
.
ξ
2
.
ξ
3
.
ξ
4
.
ξ
5
+
0
0
R
33
.ξ
3
0
0
+
G
1
G
2
G
3
0
0
In the last expression, we can remark that splitting
the model can be realized and this model is helpful,
when using reduced models, to identify what is ne-
glected regard to our proposed nominal model with
16 DoF. The dynamic equations can be reduced, in
case where we assume that motion is normal driving
in a normal staith road, to translations and rotations
of the body, and wheels plus suspension motions. For
translations we find often in literature:
m
.
v
x
=
∑
F
x
m
.
v
y
=
∑
F
y
m
.
v
z
=
∑
F
z
(5)
where m is the total mass of the vehicle and v =
[v
x
, v
y
, v
z
]
T
describe the vehicle velocities along x, y,
z. In the left hand side of this approximate model
are the forces
∑
F
x
,
∑
F
y
and
∑
F
z
applied in direc-
tions of x, y and z and the balance of the moments
(
∑
M
x
,
∑
M
y
,
∑
M
z
), give rotations following the three
directions x, y and z, is given by:
J
..
θ
..
φ
..
ψ
=
∑
M
x
∑
M
y
∑
M
z
(6)
The wheel angular motions can be written:
.
ω
f l
=
1
I
ω
(C
f l
− R
ω
F
x f 1
) (7)
.
ω
f r
=
1
I
ω
(C
f r
− R
ω
F
x f 2
)
.
ω
rl
=
1
I
ω
(C
rl
− R
ω
F
xr1
)
.
ω
rr
=
1
I
ω
(C
rr
− R
ω
F
xr2
)
VEHICLE MODELS AND ESTIMATION OF CONTACT FORCES AND TIRE ROAD FRICTION
353
with ω
f
and ω
r
are the rotation velocities of the front
and rear wheel, C
mi
is the motor couple applied at
wheel i and T
i
is the braking couple applied at wheel
i. Let r
1
be the distance between the center of grav-
ity and the front axis and r
2
the distance between the
center of gravity and the rear axis.
2.3 Partial Models
The complete model is difficult to use in control ap-
plications. It involves several variables which are not
available for measurement or not observable. The
most part of applications deal with simplified and par-
tial models. Let us consider, for our robust observer,
the simplified motion dynamics of a quarter-vehicle
model, capturing only nominal behavior (Msirdi04)
(Msirdi03). This model retains the main characteris-
tics useful for the longitudinal dynamic. For a global
application, this method can be easily extended to the
complete vehicle and involve the four coupled wheels.
The amount of neglected parts in the modeling can be
considered to evaluate robustness of proposed estima-
tors.
Applying Newton’s law to one isolated wheel
gives:.
m
.
v
x
= F
x
J
r
.
ω = T − rF
x
where m is the vehicle mass and J
r
, r are the in-
ertia and effective radius of the tire respectively. v
s
is the linear velocity of the vehicle, ω is the angular
velocity of the considered wheel. T is the accelerat-
ing (or braking) torque, and F
x
is the tire/road friction
force. The tractive (respectively braking) force, pro-
duced at the tire/road interface when a driving (brak-
ing) torque is applied to pneumatic tire, has oppo-
site direction of relative motion between the tire and
road surface. This relative motion exhibits the tire slip
properties. The wheel-slip is due to deflection in the
contact patch. The longitudinal wheel slip is gener-
ally called the slip ratio and is described by a kine-
matic relation as (Carlson).
λ =
|
v
r
− v
x
|
max(v
r
, v
x
)
(8)
where v
r
is the wheel velocity. Representing the
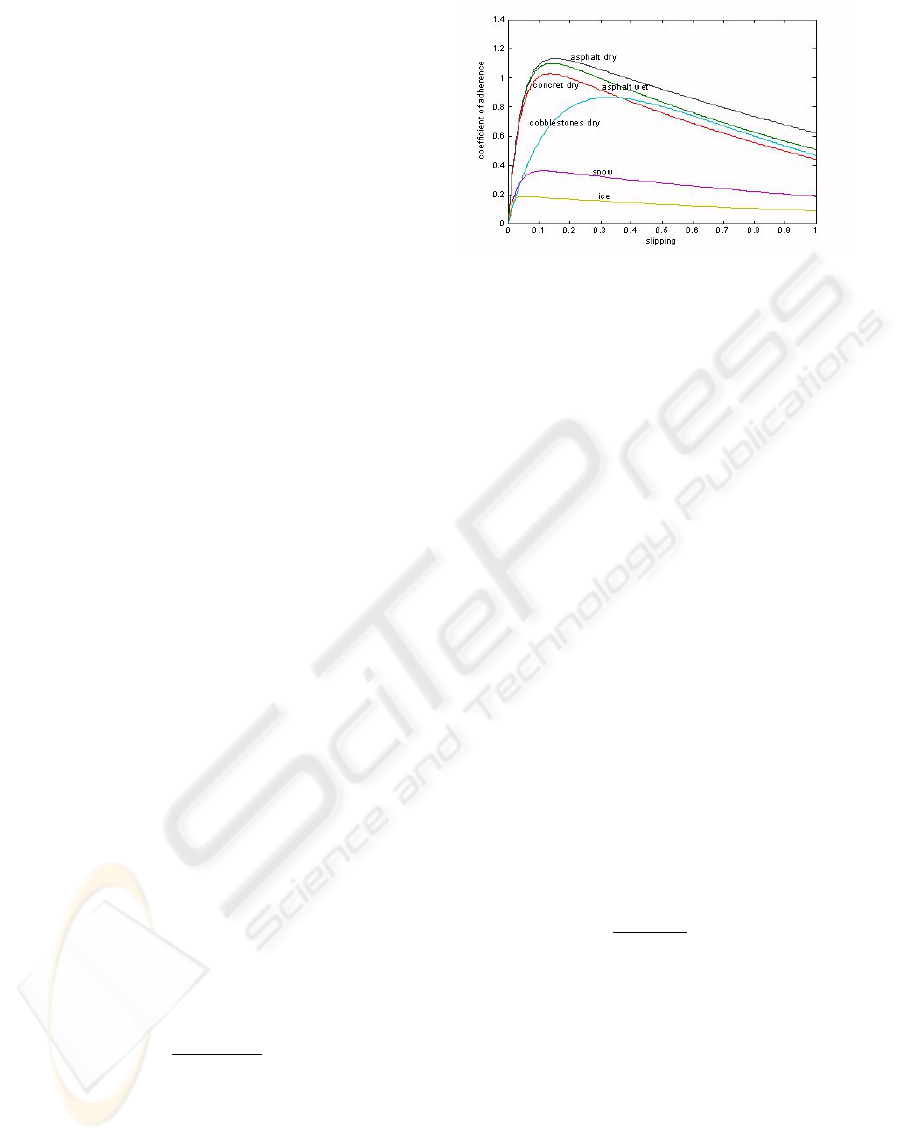
adhesion coefficient as a function of the wheel slip
yields the adhesion characteristic µ(λ), which de-
pends on the road surfaces as shown in the following
figure 2.
The figure 2 shows the relations between coeffi-
cient of road adhesion µ and longitudinal slip λ for
Figure 2: Wheel slip.
different road surface conditions. It can be observed
that all curves µ(λ) start at µ = 0 for zero slip, which
corresponds to the non-braking and non accelerating,
free rolling wheel. With a linear increasing slip ratio
from 3% to 20%. Beyond this maximum value the
slope of the adhesion characteristic is maximum and
then slope becomes negative. At a slip ratio of 100%
the wheel is completely skidding, which corresponds
to the locking of the wheel. The adhesion character-
istic plays an essential role for both the design and
the validation of ABS. Overall, to improve the perfor-
mance of an ABS it is desirable to have some real-
time information about the adhesion characteristic.
By assuming that the longitudinal forces are pro-
portional to the transversal ones, we can expressed
theses forces as follows, where F
z
is the vertical force
of the wheel.
F
x
= µF
z
(9)
The vertical forces that we use in our model
are function of the longitudinal acceleration and the
height of the center of gravity. The vertical force can
be represented as:
Fz =
m
2(l
f
+ l
r
)
(gl
r
− h
.
v
x
) (10)
where h is the height of the center of gravity, l
f
is the distance between the center of gravity and the
front axis center of gravity and l
r
is the distance be-
tween the center of gravity and the rear axis center of
gravity.
3 OBSERVER DESIGN
The sliding mode technique is an attractive approach
(Davila). The primary characteristic of SMC is that
the feedback signal is discontinuous, switching on
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
354

one or several manifolds in the state-space. In what
follows, we use a second order differentiator in order
to derive robust estimates of the tire road friction.
3.1 High Order Sliding Mode Observer
(HOSM)
In this part we will use a Robust Differentiation
Estimator (RDE) to deduce our robust estimations.
Consider a smooth dynamics function, s(x) ∈ R.
The system containing this variable may be closed
by some possibly-dynamical discontinuous feedback
where the control task may be to keep the output
s(x(t)) = 0. Then provided that successive total time
derivatives s,
.
s,
..
s...s
(r−1)
are continuous functions of
the closed system state space variables, and the t-
sliding point set is non-empty and consist locally of
Filippov trajectories.
s =
.
s =
..
s = ... = s
(r−1)
= 0 (11)
is non-empty and consists locally of Filippov tra-
jectories. The motion on set (Filippov)(Utkin99)
is called r-sliding mode (r
th
-order sliding mode)
(Orlov)(Levant).
The HOSM dynamics converge toward the origin
of surface coordinates in finite time always that the or-
der of the sliding controller is equal or bigger than the
sum of a relative degree of the plant and the actuator.
To estimate the derivatives s
1
and s
2
without its direct
calculations of derivatives, we will use the 2
nd
-order
exact robust differentiator of the form (Levant)
.
z
0
= v
0
= z
1
− λ
0
|
z
0
− s
ω
|
2
3
sign(z
0
− s
ω
)
.
z
1
= v
1
= −λ
1
sign(z
1
− v
0
)
1
2
sign(z
1
− v
0
) + z
2
.
z
2
= −λ
2
sign(z
2
− v
1
)
where z
0
, z
1
and z
2
are the estimate of s
ω
, s
1
and
s
2
, respectively, λ
i
> 0, i = 0, 1, 2. Under condition
λ
0
> λ
1
> λ
2
the third order sliding mode motion will
be established in a finite time. The obtained estimates
are z
1
= s
1
=
.
s
ω
and z
2
= s
2
=
..
s
ω
then they can be
used in the estimation of the state variables and also
in the control.
3.2 Cascaded Observers - Estimators
In this section we use the previous approach to build
an estimation scheme allowing to identify the tire
road friction. The estimations will be produced in
three steps, as cascaded observers and estimator, re-
construction of information and system states step by
step. This approach allow us to avoid the observ-
ability problems dealing with inappropriate use of the
complete modeling equations. For vehicle systems it
is very hard to build up a complete and appropriate
model for global observation of all the system states
in one step. Thus in our work, we avoid this prob-
lem by means of use of simple and cascaded models
suitable for robust observers design.
The first step produces estimations of velocities.
The second one estimate the tire forces (vertical and
longitudinal ones) and the last step reconstruct the
friction coefficient.
The robust differentiation observer is used for es-
timation of the velocities and accelerations of the
wheels. The wheels angular positions and the veloc-
ity of the vehicles body v
x
, are assumed available for
measurements. The previous Robust Estimator is use-
ful for retrieval of the velocities and accelerations.
1
st
Step:
.
b
θ = v
0
=
b
ω − λ
0
θ −
b
θ
2
3
sign(θ −
b
θ)
.
b
ω = v
1
=
.
b
ω − λ
1
sign(
b
ω − v
0
)
1
2
sign(
b
ω − v
0
)
..
b
ω = −λ
2
sign(
.
b
ω − v
1
)
The convergence of these estimates is guaranteed
in finite time t
0
.
2
nd
Step: In the second step we can estimate the
forces F
x
and F
z
. Then to estimate F
x
we use the fol-
lowing equation,
J
.
b
ω = T − R
e f
b
F
x
(12)
In the simplest way, assuming the input torques
known, we can reconstruct F
x
as follows:
b
F
x
=
(T − J
.
b
ω)
R
e f
(13)
.
b
ω is produced by the Robust Estimator (RE). Note
that any estimator with output error can also be used
to enhance robustness versus noise. In our work, in
progress actually, the torque T will be also estimated
by means of use of additional equation from engine
behavior related to accelerating inputs.
After those estimations, their use in the same time
with the system equations allow us to retrieve de ver-
tical forces F
z
as follows. To estimate F
z
we use the
following equation
b
F
z
=
m
2(l
f
+ l
r
)
(gl
r
− h.
.
b
v
x
) (14)
b
v
x
is produced by the RE.
3
rd
Step: At this step it only remains to estimate
the adherence or friction coefficient. To this end we
VEHICLE MODELS AND ESTIMATION OF CONTACT FORCES AND TIRE ROAD FRICTION
355
assume the vehicle rolling in a normal or steady state
situation in order to be able to approximate this coef-
ficient by the following formula
b
µ =
b
F
x
b
F
z
(15)
4 SIMULATION AND
EXPERIMENTAL RESULTS
In this section, we give some realistic simulation re-
sults in order to test and validate our approach and
the proposed observer. In simulation, the state and
forces are generated by use of a car simulator called
VeDyna (VEDYNA). In this simulator the model in-
volved is more complex than the one of 16 DoF pre-
sented in the first part of the paper. Comparind the
simplified model to the 16 DoF one, let us evaluate
the robustness of estimation The VeDyna simulated
brake torque is shown in figure 3.
Figure 3: Braking torque.
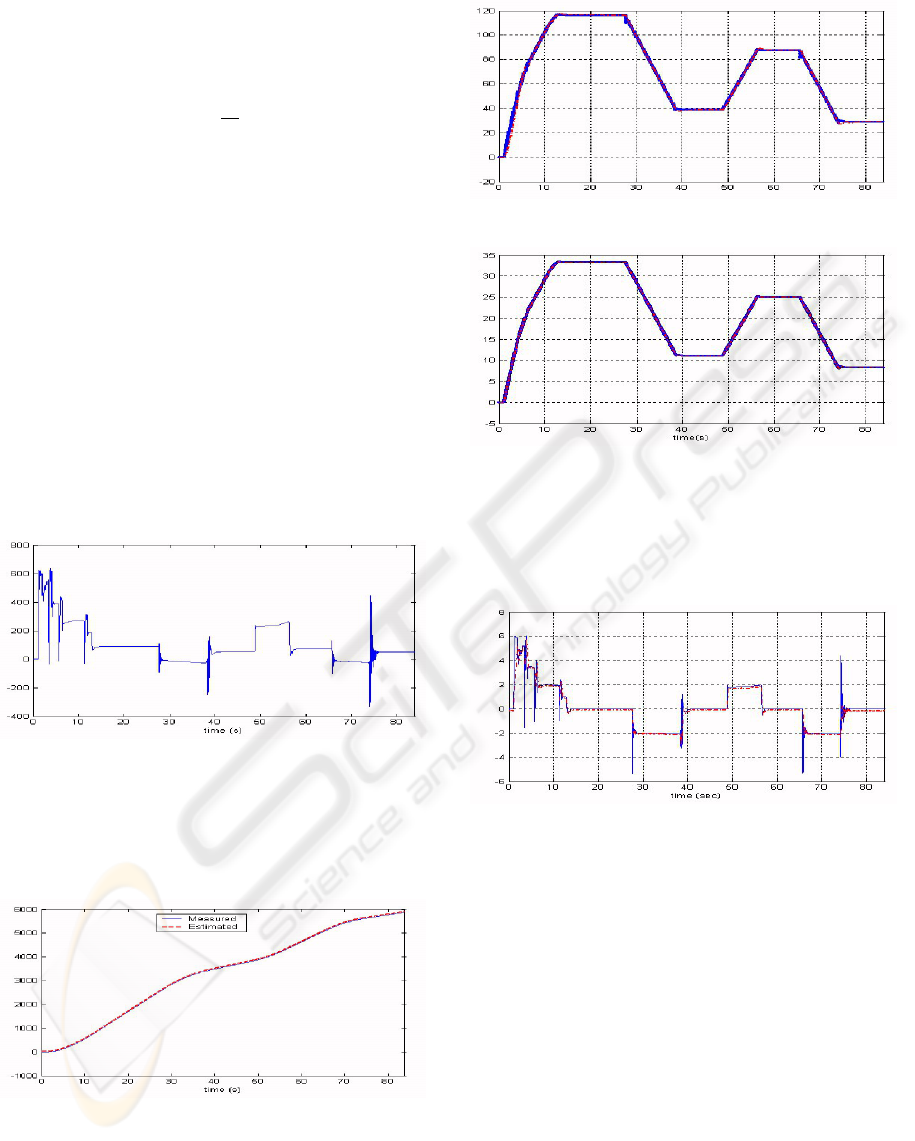
Figure 4 shows the measured and estimated wheel
angular position. This signal is used to estimate ve-
locities and accelerations. Figure 4 shows the esti-
Figure 4: Angular displacements.
mated wheel angles. In the figure 6, we represent
the estimation of vehicle velocity. The figure shows
the good convergence to the actual vehicle velocity.
Figure 7 shows the obtained vehicle acceleration. The
Figure 5: Angular Velocity.
Figure 6: Vehicle velocity.
observer allows a good estimation of angular velocity
and acceleration. The last step gives us the estimated
Figure 7: Estimated and measured acceleration.
longitudinal forces F
x
and normal forces F
z
which are
presented in figure 8 and 9. Finally road friction
coefficient is deduced and presented in figure (10).
5 CONCLUSION
In this work we have tried to highlight all approxima-
tions made in general when using simplified models
and this paper gives some details allowing to evaluate
what is really neglected. In second part od this paper,
we have proposed an efficient and robust estimator
baser on the second order sliding mode differentiator.
This is used to build an estimation scheme allowing to
identify the tire road frictions and input forces which
are non observable when using the complete model
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
356

Figure 8: Longitudinal force.
Figure 9: Normal force F
z
.
and standard sensors. The estimations produced fi-
nite time converging measurements of model inputs,
in three steps by cascaded observers and estimators.
This method shows very good performances in simu-
lations conducted using a more complex model (than
the 16 DoF one) involved in VeDyna car simulator.
Tire forces (vertical and longitudinal ones) are also
estimated correctly. Simulation results are presented
to illustrate the ability of this approach to give es-
timation of both vehicle states and tire forces. The
robustness versus uncertainties on model parameters
and neglected dynamics has also been emphasized in
simulations. Application of this approach with inclu-
sion of torque estimation using a simplified model for
the engine behavior, is in progress.
ACKNOWLEDGEMENTS
This work has been done in a collaboration managed
by members of the LSIS inside the GTAA (research
group supported by the CNRS).
Thanks are addressed to the LCPC of Nantes for
experimental data and the trials with their vehicle
Peugeot 406.
Figure 10: Road friction.
REFERENCES
F. Gustafsson, ”Slip-based tire-road friction estimation”,
Automatica, vol 33, no. 6, pp. 1087-1097, 1997.
J. Ackermann ”Robust control prevents car skidding. IEEE
Control systems magazine, V17, N3, pp23-31, 1997
N. K. M’sirdi, A. Rabhi, N. Zbiri and Y. Delanne. VRIM:
Vehicle Road Interaction Modelling for Estimation of
Contact Forces. Accepted for TMVDA 04. 3rd Int.
Tyre Colloquium Tyre Models For Vehicle Dynamics
Analysis August 30-31, 2004 University of Technol-
ogy Vienna, Austria
C. Canudas de Wit, P.Tsiotras, E.Velenis, M.Basset,
G.Gissinger. Dynamic Friction Models for Road/Tire
Longitudinal Interaction. Vehicle Syst. Dynamics
2003. V39, N3, pp 189-226.
Laura Ray. Nonlinear state and tire force estimation for ad-
vanced vehicle control. IEEE T on control systems
technology, V3, N1, pp117-124, march 1995.
Nacer K. M’Sirdi. Observateurs robustes et estimateurs
pour l’estimation de la dynamique des v
´
ehicules et du
contact pneu - route. JAA. Bordeaux, 5-6 Nov 2003
S. Drakunov, U. Ozguner, P. Dix and B. Ashrafi. ABS con-
trol using optimum search via sliding modes. IEEE
Trans. Control Systems Technology, V 3, pp 79-85,
March 1995.
A. Rabhi, H. Imine, N. M’ Sirdi and Y. Delanne. Observers
With Unknown Inputs to Estimate Contact Forces and
Road Profile AVCS’04 International Conference on
Advances in Vehicle Control and Safety Genova -
Italy, October 28-31 2004
Christopher R. Carlson. Estimation With Applications for
Automobile Dead Reckoning and Control. PhD the-
sis, University of STANDFOR 2003.
U. Kiencken, L. Nielsen. Automotive Control Systems.
Springer, Berlin, 2000.
Mendoza, Sur la mod
`
elisation et la commande des
v
´
ehicules automobiles, Th
`
ese, Juillet 1997.
H. Imine, N. M’Sirdi, L. Laval, Y. Delanne - Sliding Mode
Observers for Systems with Unknown Inputs: Appli-
cation to estimate the Road Profile. A para
ˆ
ıtre dans
ASME, Journal of Dynamic Systems, Measurement
and Control en mars 2003.
VEHICLE MODELS AND ESTIMATION OF CONTACT FORCES AND TIRE ROAD FRICTION
357

R. Ramirez-Mendoza. Sur la mod
´
elisation et la commande
des v
´
ehicules automobiles. PHD thesis Institut Na-
tional Polytechnique de Grenoble, Laboratoire d Au-
tomatique de Grenoble 1997.
G. Beurier. Mod
´
elisation et la commande de syst
`
eme. PHD
thesis LRP. UPMC Paris 6, 1998.
J. Davila and L. Fridman. “Observation and Identifica-
tion of Mechanical Systems via Second Order Slid-
ing Modes”, 8th. International Workshop on Variable
Structure Systems,September 2004, Espana
A. Levant, ”Robust exact differentiation via sliding mode
technique”, Automatica, vol. 34(3), 1998, pp 379-384.
A. F. Filippov, Differential Equations with Discontin-
uous Right-hand Sides, Dordrecht, The Nether-
lands:Kluwer Academic Publishers; 1988.
V. Utkin, J. Guldner, J. Shi, Sliding Mode Control in Elec-
tromechanical Systems, London, UK:Taylor & Fran-
cis; 1999.
J. Alvarez, Y. Orlov, and L. Acho, ”An invariance principle
for discontinuous dynamic systems with application
to a coulomb friction oscillator”, Journal of Dynamic
Systems, Measurement, and Control, vol. 122, 2000,
pp 687-690.
Levant, A. Higher-order sliding modes, differentiation and
output-feedback control, International Journal of Con-
trol, 2003, Vol.76, pp.924-941
Simulator VE-DYNA. www.tesis.de/index.php.
APPENDIX
Definition of the matrices involved.in the model.
¯
M
11
=
M
1,1
0 0
0 M
2,2
0
0 0 M
3,3
¯
M
12
=
¯
M
T
21
=
M
1,4
M
1,5
M
1,6
M
2,4
M
3,5
M
2,6
0 M
3,5
M
3,6
;
¯
M
13
=
¯
M
T
31
=
M
1,7
M
1,8
M
1,9
M
1,10
M
2,7
M
2,8
M
2,9
M
2,10
M
3,7
M
3,8
M
3,9
M
3,10
;
¯
M
23
=
¯
M
t
32
=
M
4,7
M
4,8
M
4,9
M
4,10
M
5,7
M
5,8
M
5,9
M
5,10
M
6,7
M
6,8
M
6,9
M
6,10
¯
M
24
=
¯
M
T
42
=
M
4,11
M
4,12
M
4,13
M
5,11
M
5,12
M
5,13
0 0 0
¯
M
2,5
=
¯
M
T
52
M
4,14
M
4,15
M
4,16
M
5,14
M
5,15
M
5,16
0 M
6,15
M
6,16
¯
M
2,2
=
M
4,4
M
4,5
M
4,6
M
5,4
M
5,5
M
5,6
M
6,4
M
6,5
M
6,6
;
¯
M
3,3
=
M
7,7
0 0 0
0 M
8,8
0 0
0 0 M
9,9
0
0 0 0 M
10,10
;
¯
M
4,4
=
M
11,11
0 0
0 M
12,12
0
0 0 M
13,13
¯
M
5,5
=
M
14,14
0 0
0 M
15,15
0
0 0 M
16,16
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
358
