
To Add with Caution — Decreasing a Swarm Robotics’
Efficiency by Imprudently Enhancing the Robots’
Capabilities
⋆
Yaniv Altshuler
1
, Israel A. Wagner
1,2
and Alfred M. Bruckstein
1
1
Computer Science Department, Technion, Haifa 32000 Israel
IBM Haifa Labs, MATAM, Haifa 31905 Israel
Abstract. This work discusses the common opinion among robotics systems’
designer, assuming that for a given assignment and robotics system, enhancing
the robots by increasing their physical capabilities, may only result in an im-
provement in the overall performance of the system (albeit small). Therefore, a
designer may rely on existing designs prepared in the past, and by continuously
adding resources to the robots, finally achieve the overall system’s performance
he is interested in. As it can be shown, this assumption is wrong, as it may not only
lead to a zero increase in the performance, but even to a new system, comprising
far more advance (and expensive) robots, which achieve much worse results than
the original system. The work presents an example concerning the problem of
multi-robots exploration of a graph, in which adding communication features to
the robots causes the entire system’s performance to drop significantly.
1 Introduction
In recent years significant research efforts have been invested in design and simulation
of multi-agent robotics and intelligent swarms systems — see e.g. [1–3] or [4–6] for
biology inspired designs (behavior based control models, flocking and dispersing mod-
els and predator-prey approaches, respectively), [7–10] for economics applications and
[11] for a physics inspired approach).
Tasks that have been of particular interest to researchers in recent years include syn-
ergetic mission planning [12], fault tolerance [13], swarm control [14], human design of
mission plans [15], role assignment [16], multi-robot path planning [17], traffic control
[18], formation generation [19], formation keeping [20], exploration and mapping [21],
cleaning [22] and dynamic cleaning [23] and target tracking [24].
Hitherto, in the design of robotics systems, and specifically, in the design and imple-
mentation of multi-robotics systems, there exists an implicit yet common assumption
concerning the monotonicity of the relation between the strength of the robots’ capa-
bilities (in terms of memory, sensors’ accuracy, communication capabilities, etc’), and
the overall performance this system achieves given a specific goal and an algorithm
⋆
This research supported in part by the Ministry of Science Infrastructural Grant No. 3-942 and
the Devorah fund.
Altshuler Y., A. Wagner I. and M. Bruckstein A. (2007).
To Add with Caution —Decreasing a Swarm Robotics’ Efficiency by Imprudently Enhancing the Robots’ Capabilities.
In Proceedings of the 3rd International Workshop on Multi-Agent Robotic Systems, pages 24-33
Copyright
c
SciTePress

for achieving it. In other words, is it widely assumed that given a multi-robotic sys-
tem comprising robots of certain features, designed for accomplishing a specific goal,
enhancing the robots’ features, or alternatively, supplying those robots with additional
capabilities, may only improve the performance these robots achieve when facing the
same problem.
Although appealing, this approach for performance improvement as a result of
tweaking existing multi-robotic designs by merely enhancing the robots’ capabilities
should be avoided, as such endeavors may result not only in spending expensive re-
sources on futile attempts to increase the system’s performance, but even in dramatic
decrease in the overall performance of the system. Although strange at first, this phe-
nomenon can be examined by systematically increasing some of the features of agents
designed for a given task, for example — the physical exploration of a graph, while
observing the changes in the performance of this group of agents.
One of the most interesting challenges for a robotics swarm system is the design and
analysis of a multi-robotics system for searching and exploration (in either known or
unknown areas). For example, works discussing cooperative searching tasks for static
or dynamic targets can be found in [25–31] whereas examples for cooperative coverage
of given regions are presented in [32–35].
This work presents a multi-agents system designed for exploring an unknown graph,
by physically moving along its vertices. The problem and its model is described in
Section 2. Once a system following the basic exploration algorithm was implemented
and its performance measured, a change in its robots’ features was made, namely —
their technical specification was upgraded. The first upgrade was adding communica-
tion equipment to the robots, allowing them to share the information they acquire by
traveling the graph. The second change was increasing the robots’ sensors’ range, in an
effort to increase the accuracy of the information the robots use in order to plan their
future actions, and as a result, to increase the system’s efficiency. After these changes
in the robots’ specification were implemented, the performance of the new group was
tested and analyzed. Note that the exploration algorithm itself, which was found to be
achieve the best results in the original group of robots, was not changed during this
process.
Surprisingly, the analyzed results of this experiment showed that not only that the
upgraded group of robots did not achieve superior results compared to the original group
of robots, but in fact, the exploration time required by this group was much longer
compared to the exploration time of the original group of robots. This was true both
for the robots with increased communication capabilities, as well as for the robots with
increased sensors’ range. The results and their analysis appears in Section 3.
2 Physical Graph Exploration
2.1 Physical Graphs
A physical graph denotes a graph G(V, E) in which information regarding its vertices
and edges is extracted using I/O heads, or mobile agents, instead of the “random access
extraction” which is usually assumed in graph theory. These agents can physically move

between the vertices of V along the edges of E, according to a predefined, or an on-line
algorithm or algorithm.
Moving along an edge e, however, require a certain travel effort (which might be
a constant time, or alternatively, consumes a constant amount of fuel). Thus, the com-
plexity of algorithms which work on physical graphs is measured by the total travel
efforts required, which equals the number of edges traveled by the agents. We assume
that each edge requires exactly one unit of travel effort.
Physical graphs are conveniently used in order to represent many “real world prob-
lems”, in which the most efficient algorithm is not necessarily the one whose compu-
tational complexity is the minimal, but rather one in which the agents travel along the
minimal number edges. Notice that while an algorithm which assumes a random access
data extraction (from now on be referred to as random access algorithm) may read and
write to the vertices of G at any order, an algorithm which assumes a physical data
extraction (referred to as a physical algorithm) must take into account the distance be-
tween two sequential operations. The reason for this is that the use of a random access
algorithm is performed using a processing unit and random access memory, whereas
the use of a physical algorithm is actually done in the physical environment (or a simu-
lated physical environment, which maintain the information access paradigm). Thus, a
random access algorithm can access any vertex of the graph in O(1), while a physical
algorithm is confined to the distances imposed by the physical metric.
For example, for u, v ∈ V , let us assume that the distance between v and u in G
is 5. Then if after a ‘read’ request from u, the algorithm orders a ‘write’ request to
v, this process will take at least 5 time steps, and will consume at least 5 effort units.
Furthermore, depending on the model assumed for the mobile agents knowledge base,
this operation may take even longer, if, for example, the agents are not familiar with the
shortest path from u to v, but rather know of a much longer path connecting the two.
2.2 Problem Description
For a given graph G, let each vertex v ∈ V contain some small data storage unit v
s
,
capable of storing information saved by agents traveling through v. In time t = 0, let
v
s
= ∅ for every v ∈ V .
Let us assume that whenever a robot a goes through a vertex v, is saves at least its
id number and the time of the visit in v
s
.
While in vertex v, a robot a can detect the number of other robots located in v or
in its immediate surroundings, and the number of edges going out from v. In addition,
every edge has a unique id number, written on it (very similar to a web of roads, while
each road has a unique name or a number, and that for finding out where this road leads,
one must travel along it). In addition, the robot has access to all the data stored in v
s
.
Given a group of k robots (or agents), capable of physically traveling the graph,
according to the model described in Section 2.1, while each robot can move along a
single edge per time-step, we are interested in the goal state G
g oal
in which v
s
6= ∅ for
every v ∈ V , meaning — that every vertex was visited at least once by some robot. We
are interested that the time in which G
g oal
is achieved will be minimal (namely, a short
exploration as possible).

This abstract problem may ne used for simulating many common problems in the
field of multi robotics, for example — a search and rescue mission of unknown number
of survivors in a pre-defined (or alternatively — unknown) area, distributed autonomous
mining, a de-centralized anti-virus mechanism scanning and cleaning a computer net-
work, and so on.
2.3 Exploration Algorithm
Every robot a is equipped with a data structure a
s
, capable of storing lists of vertices,
edges and locations of other robots. At t = 0 all data structures are initialized as empty.
At each time step, a robot located in vertex v follows the exploration algorithm, which
controls the vertex u this robot will move to (notice that v must be a neighbor of u).
Once a robot a reaches a certain vertex v, it integrates the information stored both in
v
s
and in a
s
, so that at the end of this process, both contains the same information.
Whenever an inconsistency is found regarding the status of a certain vertex, edge or
robot, it is solved according to the most recent entry concerning this item.
It can be seen that throughout the movement along the graph generated by the ex-
ploration algorithm, combined with the information proliferation process executed by
using the robots as a tool for transferring the information between the vertices, a more
and more accurate image of G is generated in the vertices storage components, as well
as in the robots’ data structures. This accuracy in turn, is supposed to contribute to the
efficiency of the robots, by accelerating the exploration process.
The exploration algorithm selected for this mission can generally be described as
the following pseudo-code, executed by each robot independently :
1. For every v in V
′
, when V
′
is the list of vertices currently known to the robot,
perform the following :
(a) Let unvisited(v) denote the number of edges of v, currently known to the robot,
whose destination from v is currently unknown.
(b) Let distance(v) denote the length of the shortest path between v and the current
location of the robot, comprising only vertices and edges currently known to
the robot.
(c) Let robots(v) denote the probability that other robots are located at v. This is
calculated based on the knowledge the robot has of the structure of G in the
vicinity of v and of the knowledge the robot has concerning the whereabouts
of the other robots.
(d) Let robots-neighborhood(v ) denote the probability that other robots are located
at the close vicinity of v. This is calculated similarly to robots(v).
(e) Calculate the combined score of v, as a weighted average of unvisited(v),distance(v),
robots(v),robots-neighborhood(v). Note that the selection of the averaging vec-
tor is an extremely important feature of the exploration algorithm.
2. Let v
best
be the vertex whose combined score is the highest.
3. Start walking towards v
best
(at the pace of a single edge per time-step).
4. When reaching v
best
, randomly select one of the edges going out from v
best
with
an unknown destination, and move towards it.

For choosing the best averaging vector, many simulation were executed, testing a
variety of weights values. Finally, several vectors were found, which were both robust
(in terms of a relatively high score for the scenarios in which they function at their
worst) and potent (in terms of the ability to score extremely high in scenarios in which
they were at the best). A detailed discussion concerning the specific vectors and the
process of selecting them will appear in an extended version of this work, currently
under preparation.
2.4 Upgrades
Once the performance of a group of k robots implementing the exploration algorithm
with the chosen averaging vectors were available, the robots’ technical specification
was enhanced by two major aspects.
First, a component simulating a full-range broadcasting equipment was added to
each robots, allowing it to instantly update and receive information from the other robots
of the group. The result of this upgrade if essentially the ability of a robot which calcu-
lates the heuristic score of the vertices of the graph, trying to decide its destination, to
use the most accurate information, as it is known to any of the robots. This upgrade was
expected to boost the performance of the robots, since often, a robot becomes isolated
in the graph, traveling among previously visited vertices, while valuable information
concerning this area of the graph was already gathered by the rest of the robots, and is
unavailable for this robot.
The second upgrade was the addition of a full-range sensor, capable of scanning
the entire graph G. Notice that this component transform each robot to an omniscient
unit, making both communication equipment and data storage components along the
vertices unnecessary (as at any given time, each robot can access any information it
requires, with complete accuracy). This upgrade was expected to increase even further
the robots’ efficiency, and as a result — to decrease their exploration time.
3 Results
A simulation of the three types of robots was built. The exploration algorithm was tested
on Erd
¨
os-Renyi random graphs G ∼ G(n, p) where G has n vertices, and each pair of
vertices form an edge in G with probability p independently of each other.
Surprisingly, once examining the exploration times of the upgraded robots, and
comparing them to those of the original groups of robots, the exploration times of the
original groups were significantly lower than those of the upgraded robots. An example
of this phenomenon appears in Figure 1.
It can easily be seen that although there is almost no difference between the per-
formance of the broadcasting robots and the omniscient robots, both had much longer
exploration times than the the original group of the “simple robots”, which lacked ei-
ther communication or extreme sensing capabilities. It is interesting to mention that this
phenomenon became increasingly more intense as the graphs became more and more
dense, that is — as p, the edge probability, was increased. Furthermore, as the group
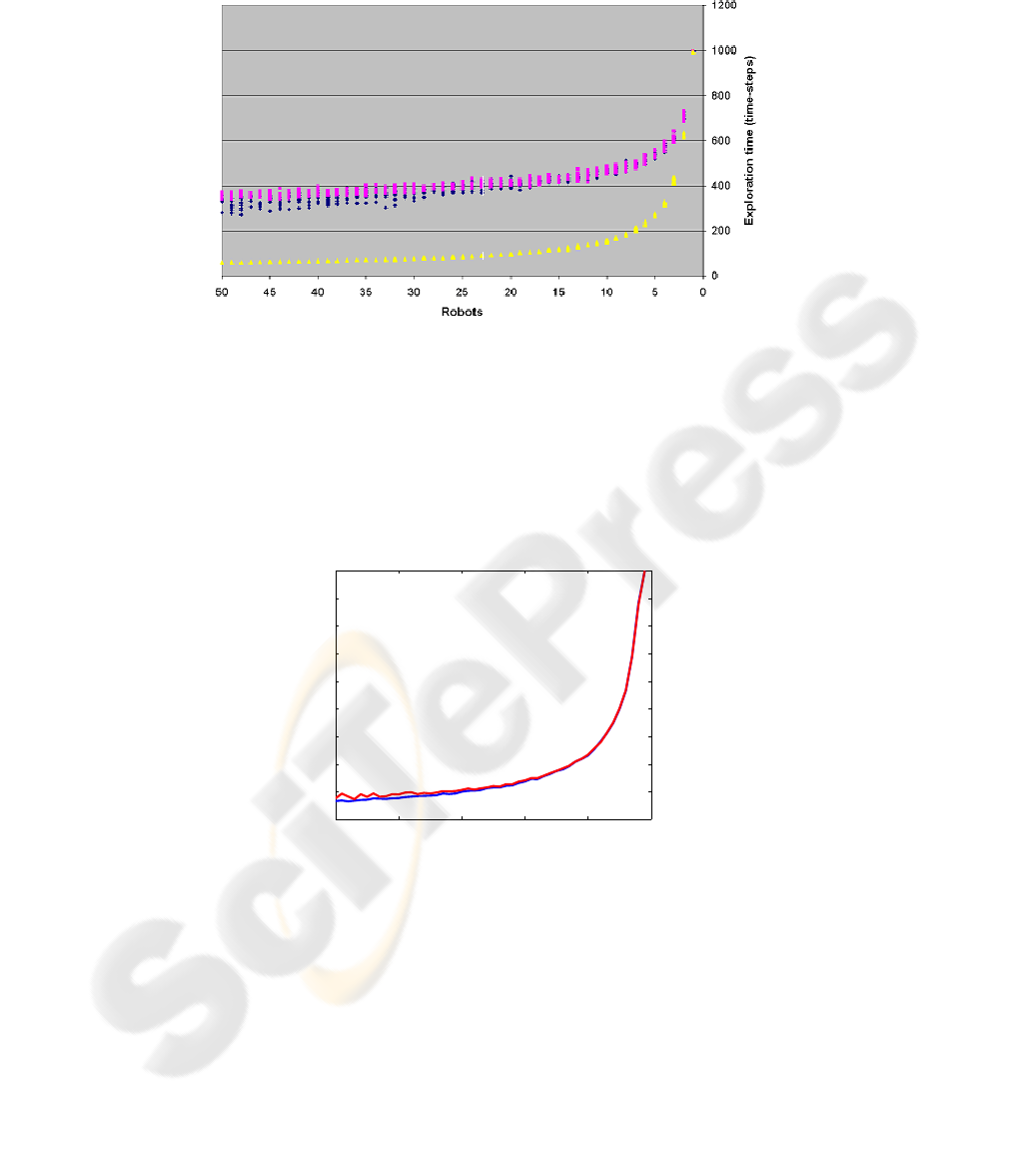
Fig.1. This chart depicts the range of exploration times of three groups of robots, tested in a
variety of random graphs. The lower yellow curve represents the exploration time of the orig-
inal group, comprising “basic robots”, to whom the exploration algorithm used was originally
designed. The blue and purple curves represent the exploration times of the two groups of “up-
graded robots”, whose communication and sensing capabilities were enhanced, respectively.
01020304050
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Fig.2. The graph represents the ratio between exploration times of the “basic robots” and aver-
aged results of the two groups of “upgraded robots” (the red curve represents the robots which
were assigned a full-range broadcasting capability, while the blue curve represents the robots
whose sensors’ range was increased). As the number of robots (represented as the X axes) in-
creases, the ratios discussed decreases. For groups of over 30 robots, the upgraded robots achieve
an efficiency of approximately 20% than this of the simple robots (namely, 5 times larger an
exploration time).

of robots became larger, the inefficiency of the upgraded robots became significantly
clearer, as can be seen in Figure 2
After analyzing the reasons for these unexpected results, by reconstructing the in-
ternal decisions’ considerations made by each robot in the various scenarios, it was
discovered that the improved accuracy of the robots caused an undesired synchronicity
effect, grouping the robots into a small and tightly packed group. As a result, the robots
were not able to efficiently explore many parts of the graphs, as they moved heavily,
delaying each other from exposing unrevealed valuable information (such as shorter
paths between vertices).
As it turned out, the reason for this phenomenon was that the averaging vector,
found to be best for the original group of robots, contained a positive weight for the
robots(v) element. The positive contribution of this element to the overall score of some
vertex v intended to assist the scattered robots to remain loosely tied, in order to sustain
the proliferation of valuable information. As the accuracy of the robots’ knowledge
increased (first by providing them a accurate information concerning the other robots’
whereabouts at any given time, and later by providing them even the shortest ways
of reaching each other), the robots no longer needed such a strong attraction factor
in their decision making process. However, as the robots utilizes the same exploration
algorithm as originally was used by the simple robots, this attractor stopped being an
assisting element, but rather generated the delaying effect described above.
After further investigating this phenomenon, as assumption was made, that by slightly
changing the exploration algorithm, the upgraded robots will easily be able to achieve
superior performance, as originally expected. For example, by simulating noise when
it comes to the locations of the other robots, by deciding randomly whether to take
the mentioned attracting factor into consideration, or by merely changing the averag-
ing vector, decreasing the effect of the robots(v) component on the overall score of a
vertex. However, while the first two methods require the robots to be enhanced once
again (as a random generator was not currently included in the robots’ specification),
the last cannot easily be analytically shown to improve the performance. Nevertheless,
it is very easy to show that there exist some alternative exploration algorithm which
will enable the upgraded robots to produce far faster exploration than the simple robots
(for example, having a complete knowledge of the graph, each robot can calculate lo-
cally the fastest way in which the entire group can scan the graph, and then simply act
its role in this plan). However, as this was already known prior to this experiment, it
does not contradict the experiment’s result, namely — that enhancing the capabilities
of robots which act according to an algorithm who did not take into consideration this
enhancement, may result in an overall decrease of the system’s performance.
4 Conclusions
This work discussed a multi-robotic system designed for the task of physically ex-
ploring an unknown graph. The problem and the solution model were presented, as
well as the initial results of a selected exploration algorithm. Then, two changes in the
robots’ technical specification, intended to increase the robots’ efficiency and perfor-
mance were presented, and the results obtained by a group comprising the new robots

were presented and analyzed. These results hinted that counterintuitively, increasing
the robots’ physical capabilities caused a decrease in the system’s overall performance,
due to the appearance of a strong synchronicity between the robots. An estimation was
made concerning a possible solution to this problem, which in turn would have re-
quired both changing the robots’ exploration algorithm and possibly, enhancing even
more the robots’ specification. An observation concerning the results of this experi-
ment was made, stating that when “improving” existing robots, one should take extra
care to verify that this improvement does not result in such malicious impacts on the
entire robots group. In conclusion, it is important to state that the results of the experi-
ment discussed in this work do not intend to speak against the enhancements of existing
robots’, or multi-robotic systems’ capabilities per-se, but rather — to remind designers
of such systems that although innocent, any change in original designs should be done
with care and systematic examination (both theoretical and empirical) of the possible
results of such a change.
References
1. S. Hettiarachchi, W. Spears: “Moving swarm formations through obstacle fields”, in Interna-
tional Conference on Artificial Intelligence, (2005).
2. I.A. Wagner, A.M. Bruckstein: “From Ants to A(ge)nts: A Special Issue on Ant—Robotics”,
Annals of Mathematics and Artificial Intelligence, Special Issue on Ant Robotics, Kluer
Academic Publishers, vol. 31, Nos. 1–4, pp. 1–6, (2001)
3. L.Steels: “Cooperation Between Distributed Agents Through Self-Organization”, Decentral-
ized A.I - Proc. first European Workshop on Modeling Autonomous Agents in Multi-Agents
world, Y.DeMazeau, J.P.Muller (Eds.), pp. 175–196, Elsevier, (1990)
4. R.C.Arkin: “Integrating Behavioral, Perceptual, and World Knowledge in Reactive Naviga-
tion”, Robotics and Autonomous Systems, 6:pp.105-122, (1990).
5. M.J.Mataric: “Designing Emergent Behaviors: From Local Interactions to Collective Intel-
ligence”, In J.Meyer, H.Roitblat, and S.Wilson, editors, Proceedings of the Second Interna-
tional Conference on Simulation of Adaptive Behavior, pp.432-441, Honolulu, Hawaii, MIT
Press, (1992).
6. T.Haynes, S.Sen: “Evolving Behavioral Strategies in Predators and Prey”, In Gerard Weiss
and Sandip Sen, editors, Adaptation and Learning in Multi-Agent Systems, pp.113-126.
Springer, (1986).
7. B.P.Gerkey, M.J.Mataric: “Sold! Market Methods for Multi-Robot Control”, IEEE Transac-
tions on Robotics and Automation, Special Issue on Multi-robot Systems, (2002).
8. G.Rabideau, T.Estlin, T.Chien, A.Barrett: “A Comparison of Coordinated Planning Methods
for Cooperating Rovers”, Proceedings of the American Institute of Aeronautics and Astro-
nautics (AIAA) Space Technology Conference, (1999).
9. S.M.Thayer, M.B.Dias, B.L.Digney, A.Stentz, B.Nabbe, M.Hebert: “Distributed Robotic
Mapping of Extreme Environments”, Proceedings of SPIE, Vol. 4195, Mobile Robots XV
and Telemanipulator and Telepresence Technologies VII, (2000).
10. M.P.Wellman, P.R.Wurman: “Market-Aware Agents for a Multiagent World”, Robotics and
Autonomous Systems, Vol. 24, pp.115–125, (1998).
11. D.Chevallier, S.Payandeh: “On Kinematic Geometry of Multi-Agent Manipulating System
Based on the Contact Force Information”, The 6
th
International Conference on Intelligent
Autonomous Systems (IAS-6), pp.188–195, (2000).

12. R.Alami, S.Fleury, M.Herrb, F.Ingrand, F.Robert: “Multi-Robot Cooperation in the Martha
Project”, IEEE Robotics and Automation Magazine, (1997).
13. L.E.Parker: “ALLIANCE: An Architecture for Fault-Tolerant Multi-Robot Cooperation”,
IEEE Transactions on Robotics and Automation, 14(2), pp. 220-240, (1998).
14. M.J.Mataric: “Interaction and Intelligent Behavior”, PhD Thesis, Massachusetts Institute of
Technology, (1994).
15. D.MacKenzie, R.Arkin, J.Cameron: “Multiagent Mission Specification and Execution”, Au-
tonomous Robots, 4(1), pp. 29-52, (1997).
16. C.Candea, H.Hu, L.Iocchi, D.Nardi, M.Piaggio: “Coordinating in Multi-Agent RoboCup
Teams”, Robotics and Autonomous Systems, 36(2- 3):67-86, August (2001).
17. A.Yamashita, M.Fukuchi, J.Ota, T.Arai, H.Asama: “Motion Planning for Cooperative Trans-
portation of a Large Object by Multiple Mobile Robots in a 3D Environment”, In Proceedings
of IEEE International Conference on Robotics and Automation, pp. 3144-3151, (2000).
18. S.Premvuti, S.Yuta: “Consideration on the Cooperation of Multiple Autonomous Mobile
Robots”, In Proceedings of the IEEE International Workshop of Intelligent Robots and Sys-
tems, pp. 59-63, Tsuchiura, Japan, (1990).
19. N.Gordon, I.A.Wagner, A.M.Bruckstein: “Discrete Bee Dance Algorithms for Pattern For-
mation on a Grid”, In the proceedings of IEEE International Conference on Intelligent Agent
Technology (IAT03), pp. 545–549, October, (2003).
20. T.Balch, R.Arkin: “Behavior-Based Formation Control for Multi-Robot Teams”, IEEE
Transactions on Robotics and Automation, December (1998).
21. I.M. Rekleitis, G. Dudek, E. Milios: “Experiments in Free-Space Triangulation Using Co-
operative Localization”, IEEE/RSJ/GI International Conference on Intelligent Robots and
Systems (IROS), (2003).
22. I.A. Wagner, A.M. Bruckstein: “Cooperative Cleaners: A Case of Distributed Ant-Robotics”,
“Communications, Computation, Control, and Signal Processing: A Tribute to Thomas
Kailath”, pp. 289–308, Kluwer Academic Publishers, The Netherlands, (1997)
23. Altshuler, Y., Bruckstein, A.M., Wagner, I.A.: “Swarm Robotics for a Dynamic Cleaning
Problem”, in “IEEE Swarm Intelligence Symposium 2005”, pp. 209–216, (2005).
24. Shucker, B., Bennett, J.K.: “Target tracking with distributed robotic macrosensors”, Military
Communications Conference 2005 (MILCOM 2005), vol. 4, pp. 2617–2623, (2005).
25. Y.Altshuler, V. Yanovsky, I.A.Wagner, A.M. Bruckstein: “The Cooperative Hunters - Ef-
ficient Cooperative Search For Smart Targets Using UAV Swarms”, Second International
Conference on Informatics in Control, Automation and Robotics (ICINCO), the First In-
ternational Workshop on Multi-Agent Robotic Systems (MARS), pp. 165–170, Barcelona,
Spain, (2005).
26. Kerr, W., Spears, D.: “Robotic simulation of gases for a surveillance task”, Intelligent Robots
and Systems 2005 (IROS 2005), pp. 2905–2910, (2005).
27. Passino, K., Polycarpou, M., Jacques, D., Pachter, M., Liu, Y., Yang, Y., Flint, M. and Baum,
M.: “Cooperative Control for Autonomous Air Vehicles”, In Cooperative Control and Opti-
mization, R. Murphey and P. Pardalos, editors. Kluwer Academic Publishers, Boston, (2002).
28. Polycarpou, M., Yang, Y. and Passino, K.: “A Cooperative Search Framework for Distributed
Agents”, In Proceedings of the 2001 IEEE International Symposium on Intelligent Control
(Mexico City, Mexico, September 5–7). IEEE, New Jersey, pp. 1–6, (2001).
29. Stone, L.D: “Theory of Optimal Search”, Academic Press, New York, (1975).
30. Koopman, B.O: “The Theory of Search II, Target Detection”, Operations Research 4, 5,
503–531, October, (1956).
31. Vincent, P., Rubin, I.: “A Framework and Analysis for Cooperative Search Using UAV
Swarms”, ACM Simposium on applied computing, (2004).

32. Rekleitisy, I., Lee-Shuey, V., Peng Newz, A., Chosety, H.: “Limited Communication, Multi-
Robot Team Based Coverage”, Proceedings of the 2004 IEEE International Conference on
Robotics and Automation, New Orleans, LA, April, (2004).
33. Koenig, S., Liu, Y.: “Terrain Coverage with Ant Robots: A Simulation Study”, AGENTS’01,
May 28–June 1, Montreal, Quebec, Canada, (2001).
34. I.Rekleitis, A.P New, H.Choset: “Distributed coverage of unknown/unstructured environ-
ments by mobile sensor networks”, the Third MRS workshop, (2005).
35. C.S.Kong, N.A.Peng, I.Rekleitis: “Distributed Coverage with Multi-Robot System”, Pro-
ceedings of the 2006 IEEE International Conference on Robotics and Automation Orlando,
Florida - May (2006).
