
PRIUS CONTROL WITH A HYBRID METHOD
Danil Prokhorov
Toyota Technical Center
Toyota Motor Engineering and Manufacturing North America (TEMA)
2350 Green Rd., TRD, Ann Arbor, MI 48105, U.S.A.
Keywords:
HEV powertrain, neurocontroller, extended Kalman filter.
Abstract:
We describe an application of a computational intelligence method for superior control of the Toyota Prius
hybrid electric vehicle. We are interested in improvement of fuel efficiency while reducing emissions. We
describe our approach which is based on recurrent neural networks. The proposed approach is quite general
and applicable to other complex real-world systems.
1 INTRODUCTION
Hybrid powertrains have been gaining popularity due
to their potential to improve significantly fuel econ-
omy and reduce undesirable emissions. Control
strategies of the hybrid electric vehicle (HEV) are
more complex than those of the internal combustion
engine-only vehicle because they have to deal with
multiple power sources in sophisticated configura-
tions. The main function of any control strategy is
power management. It typically implements a high-
level control algorithm which determines the appro-
priate power split between the electric motor and the
engine to minimize fuel consumption and emissions,
while staying within specified constraints on drivabil-
ity, reliability, battery charge sustenance, etc.
Computational intelligence techniques have pre-
viously been applied to HEV power management by
various authors. A rule-based control was employed
in (Baumann et al., 2000). Fuel economy improve-
ment with a fuzzy controller was demonstrated in
(Schouten et al., 2002), relative to other strategies
which maximized only the engine efficiency. An in-
telligent controller combining neural networks and
fuzzy logic which could adapt to different drivers and
drive cycles (profiles of the required vehicle speed
over time) was studied in (Baumann et al., 1998).
Recently a neurocontroller was employed in a hybrid
electric propulsion system of a small unmanned aerial
vehicle which resulted in significant energy savings
(Harmon et al., 2005).
The references cited above indicate a significant
potential for improving HEV performance through
more efficient power management based on applica-
tion of computational intelligence (CI) techniques. To
the best of our knowledge, there has been no work on
improving HEV control by CI methods for the Toy-
ota Prius. Though the Prius efficiency is quite high
already, there is a significant potential for further im-
provement, as will hopefully become apparent from
this paper.
Unlike traditional hybrid powertrain schemes, se-
ries or parallel, the Prius hybrid implements what is
called the power split scheme. This scheme is quite
innovative and has not been studied extensively yet.
The Prius powertrain uses a planetary gear mecha-
nism to connect an internal combustion engine, an
electric motor and a generator. A highly efficient en-
gine can simultaneously charge the battery through
the generator and propel the vehicle (Figure 1). It is
important to be able to set the engine operating point
to the highest efficiency possible and at sufficiently
low emission levels of undesirable exhaust gases such
as hydrocarbons, nitrogen oxides and carbon monox-
ide. The motor is physically attached to the ring gear.
It can move the vehicle through the fixed gear ratio
and either assist the engine or propel the vehicle on its
own for low speeds. The motor can also return some
energy to the battery by working as another generator
in the regenerative braking mode.
372
Prokhorov D. (2007).
PRIUS CONTROL WITH A HYBRID METHOD.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 372-375
DOI: 10.5220/0001637703720375
Copyright
c
SciTePress

Figure 1: The Prius car and the main components of the
Toyota hybrid system.
As in our previous work (Prokhorov et al., 2001),
we employ recurrent neural networks (RNN) as con-
trollers and train them for robustness to parametric
and signal uncertainties (known bounded variations of
physical parameters, reference trajectories, measure-
ment noise, etc.). We intend to deploy the trained neu-
rocontroller with fixed weights.
This paper is structured as follows. In the next
section we describe the main elements of our off-line
training. The approach permits us to create an RNN
controller which is ready for deployment with fixed
weights. We then describe our experiments in Sec-
tion 3, followed by our conclusions and directions for
future work.
2 OFF-LINE TRAINING
We adopt the approach of indirect or model based
control development for off-line training. The Prius
simulator is a highly complex, distributed software
which makes training a neurocontroller directly in
the simulator difficult. We implemented a hybrid ap-
proach in which the most essential elements of the
simulator are approximated sufficiently accurately by
a neural network model. The NN model is used to
train a neurocontroller by effectively replacing the
simulator. The trained neurocontroller performance
is then verified in the simulator.
The use of differentiable NN for both model and
controller makes possible application of the industri-
ally proven training method which employs the back-
propagation through time (BPTT) and the extended
Kalman filter (EKF) for training NN. We refer the
reader to other references for its more comprehensive
account (Prokhorov et al., 2001), (Puskorius et al.,
1996).
3 EXPERIMENTS
We first train a NN model to enable off-line train-
ing the neurocontroller as discussed in Section 2. To
do supervised training of the NN model in Figure
2, we gather the input-output pairs from 20 diverse
drive cycles generated in the Prius simulator. We
trained a 25-node structured RNN for 3000 epochs
using the multi-stream EKF (Prokhorov et al., 2001)
and attained the training RMSE of 5·10
−4
(the largest
generalization RMSE was within 20% of the training
RMSE).
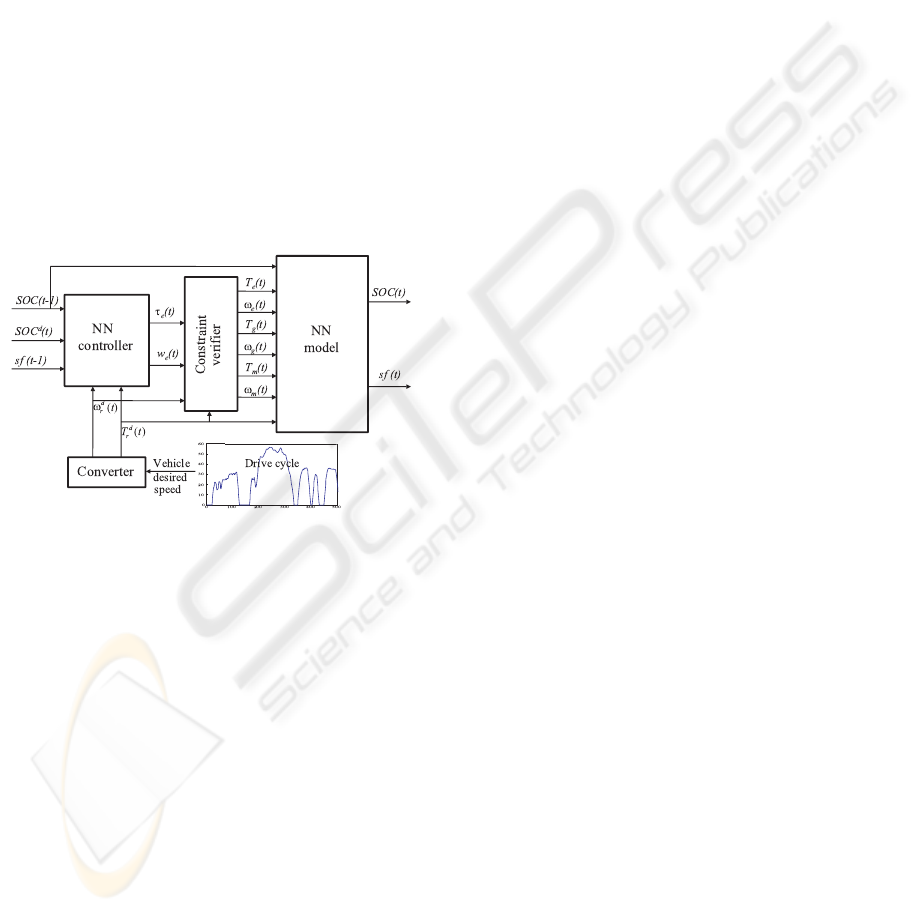
The closed-loop control system for training the
NN controller is shown in Figure 2. The converter
determines the required values of the speed ω
d
r
and
the torque T
d
r
at the ring gear of the planetary mecha-
nism to achieve the desired vehicle speed specified in
the drive cycle. This is done on the basis of the Prius
model of motion. The constraint verifier assures sat-
isfaction of various constraints which must hold for
the engine, the motor and the generator speeds and
torques in the planetary gear mechanism, i.e., ω
e
and
T
e
, ω
m
and T
m
, ω
g
and T
g
, respectively.
Our first control goal is to minimize the average
fuel consumed by the engine. However, fuel mini-
mization only is not feasible. The Prius nickel-metal
hydride battery is the most delicate nonlinear compo-
nent of the system with long-term dynamics due to
discharging, charging and temperature variations. It
is important to avoid rapid and deep discharges of the
battery which can drastically reduce its life, requir-
ing costly repairs or even battery replacement. Thus,
the second goal of the HEV control is to maintain the
battery State Of Charge (SOC) throughout the drive
cycle in the safe zone. The SOC can vary between
0.0 (fully discharged) and 1.0 (fully charged), but the
safe zone is typically above 0.4.
We combine the two control goals to ob-
tain cost(t) = λ
1
sf
2
(t) + λ
2
(t)(SOC
d
(t) − SOC(t))
2
,
where sf(t) stands for specific fuel or fuel rate con-
sumed by the engine at time t, λ
1
= 1, and λ
2
(t) ∈
[10, 50] due to about one order of magnitude differ-
ence between values of s f and those of SOC. The
desired SOC
d
(t) is constant in our experiments for
simplicity. We encourage our controller to pay ap-
proximately the same level of attention to both sf and
SOC, although the optimal balance between λ
1
and
λ
2
is yet to be determined. We also penalize reduc-
tions of the SOC below SOC
d
five times heavier than
its increases to discourage the controller from staying
PRIUS CONTROL WITH A HYBRID METHOD
373
in the low-SOC region for long. Thus, λ
2
(t) = 10 if
SOC(t) ≥ SOC
d
, and λ
2
(t) = 50 if SOC(t) < SOC
d
.
Ultimately, we would also like to minimize emis-
sions of the harmful gases. In this study we attempt to
reduce emissions indirectly through reducing the fuel
consumption because they are often correlated.
Our RNN controller has 5-5R-2 architecture, i.e.,
five inputs, five recurrent nodes in the fully recur-
rent hidden layer, and two bipolar sigmoids as output
nodes. The RNN receives as inputs the required out-
put drive speed ω
d
r
and torque T
d
r
, the current engine
fuel rate s f, the current SOC and the desired SOC
SOC
d
(see Figure 2; the desired fuel rate is implicit,
and it is set to zero). The RNN produces two con-
trol signals in the range of ±1. The first output is the
engine torque τ
e
, and the second output is the engine
speed w
e
which become T
e
and ω
e
, respectively, after
passing through the constraint verifier.
Figure 2: Block diagram of the closed-loop system for train-
ing the NN controller. The converter determines the re-
quired values of speed ω
d
r
and torque T
d
r
at the ring gear
of the planetary mechanism to achieve the desired vehicle
speed profile. The constraint verifier makes sure not only
that the torques and speeds are within their specified physi-
cal limits but also that they are consistent with constraints of
the planetary gear mechanism. The trained NN model takes
care of the remaining complicated dynamics of the plant.
The feedback loop is closed via SOC and the fuel rate sf,
but the required ω
d
r
and T
d
r
are guaranteed to be achieved
through the appropriate design of the constraint verifier.
Our RNN controller is trained off-line using the
multi-stream EKF algorithm described in Section 2.
When training of our NN controller from Figure 2 is
finished, we can deploy it inside the high-fidelity sim-
ulator which approximates well behavior of the real
Prius and all its powertrain components. As expected,
we observed some differences between the neurocon-
troller performance in the closed loop with the NN
model and its performance in the high-fidelity simu-
lator because the NN model and the verifier only ap-
proximate the simulator’s behavior. Our results below
pertain to the simulator, rather than its NN approxi-
mation.
The basic idea of the current Prius HEV control
logic is discussed in (Hermance, 1999). When the
power demand is low and the battery SOC is suffi-
ciently high, the motor powers the vehicle. As the
power demand and vehicle speed increase, or the SOC
reduces below a threshold, the engine is started (the
generator may help the motor start the engine). The
engine power is split between propelling the vehi-
cle and charging the battery through the generator.
As the power demand continues to grow, the engine
might not be able to stay within its efficiency limits.
In those cases the motor can provide power assist by
driving the wheels to keep the engine efficiency rea-
sonably high, as long as the battery can supply the re-
quired power. During decelerations the motor is com-
manded to operate as a generator to recharge the bat-
tery, thereby implementing regenerative braking.
It is hard to make this rule-based strategy opti-
mal for such a complex powertrain. Significant aver-
aging over drive cycles with quite different behavior
compromising the best achievable performance is un-
avoidable. We believe that a strategy based on a data-
driven learning system should be able to beat the rule-
based strategy because of its ability to discern differ-
ences in driving patterns and take advantage of them
for improved performance.
We compare our RNN controller trained for ro-
bustness with the rule-based control strategy of the
Prius on 20 drive cycles including both standard
cycles (required by government agencies) and non-
standard cycles (e.g., random driving patterns). Our
RNN controller is better by 15% on average than the
rule-based controller in terms of fuel efficiency, and it
appears to be slightly better than the rule-based con-
troller in terms of its emissions on long drive cycles.
It also reduces variance of the SOC over the drive cy-
cle by at least 20%.
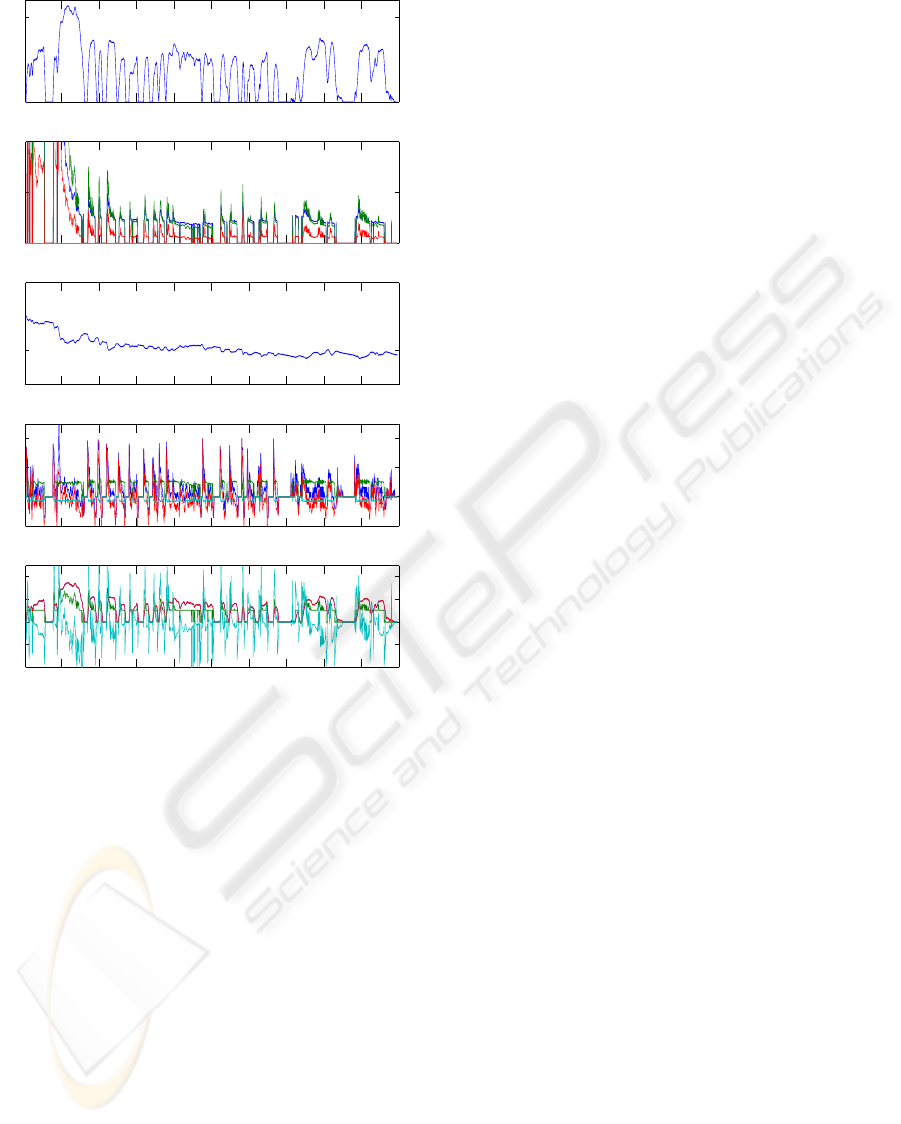
Figure 3 shows an example of our results. It is
a fragment of a long drive cycle (the total length is
12, 700 seconds). Our advantage appears to be in the
more efficient usage of the engine. The engine effi-
ciency is 32% vs. 29% for the rule-based controller.
We also achieved a big improvement in the genera-
tor efficiency: 77% vs. 32%, with other component
efficiencies remaining basically unchanged.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
374
200 400 600 800 1000 1200 1400 1600 1800 2000
0
50
vehicle speed
200 400 600 800 1000 1200 1400 1600 1800 2000
0
0.005
0.01
emissions
200 400 600 800 1000 1200 1400 1600 1800 2000
0.6
0.8
soc
200 400 600 800 1000 1200 1400 1600 1800 2000
−100
0
100
200
torques
200 400 600 800 1000 1200 1400 1600 1800 2000
−400
−200
0
200
400
speeds
Figure 3: A 2000-second fragment of a long city drive cycle
illustrating the typical performance of our RNN controller.
The initial segment (from 0 to ∼ 300 seconds) has signifi-
cant unavoidable emissions due to the engine cold start. The
speed ω
d
r
and the torque T
d
r
are the blue lines, ω
e
and T
e
are
the green lines, the ω
m
and T
m
are the red lines, and ω
g
and
T
g
are the cyan lines. Note that ω
m
= ω
d
r
due to the system
design constraint.
4 CONCLUSION
We illustrate our approach to training neurcontrollers
on the Toyota Prius HEV through a high-fidelity sim-
ulation, which is done for the first time by methods of
computational intelligence and with results improved
over those of the existing controller. Our approach is
applicable to many real-world control problems.
REFERENCES
Baumann, B., Rizzoni, G., and Washington, G. N. (1998).
Intelligent control of hybrid vehicles using neural net-
works and fuzzy logic. In SAE Technical Paper
981061, SAE Int. Cong. and Exposition. SAE Press.
Baumann, B. M., Washington, G. N., Glenn, B. C., and Riz-
zoni, G. (2000). Mechatronic design and control of
hybrid electric vehicles. IEEE/ASME Transactions on
Mechatronics, 5(1):58–72.
Harmon, F., Frank, A., and Joshi, S. (2005). The control of a
parallel hybrid-electric propulsion system for a small
unmanned arial vehicle using a cmac neural network.
Neural Networks, 18(5/6):772–780.
Hermance, D. (1999). Toyota hybrid system. In SAE
TOPTEC Conference Proc., Albany, NY. SAE Press.
Prokhorov, D. V., Puskorius, G. V., and Feldkamp, L. A.
(2001). Dynamical neural networks for control. In A
Field Guide to Dynamical Recurrent Networks, Edited
by J. Kolen and S. Kremer. IEEE Press.
Puskorius, G. V., Feldkamp, L. A., and L. I. Davis, J.
(1996). Dynamic neural network methods applied
to on-vehicle idle speed control. Proceedings of the
IEEE, 84(10):1407–1420.
Schouten, N., Salman, M., and Kheir, N. (2002). Fuzzy
logic control for parallel hybrid vehicles. IEEE Trans-
actions on Control Systems Technology, 10(3):460–
468.
PRIUS CONTROL WITH A HYBRID METHOD
375
