
ROBUST CONTROL OF HYSTERETIC BASE-ISOLATED
STRUCTURES UNDER SEISMIC DISTURBANCES
Francesc Pozo, Jos
´
e Rodellar
CoDAlab, Universitat Polit
`
ecnica de Catalunya, Comte d’Urgell, 187, 08036 Barcelona, Spain
Leonardo Acho, Ricardo Guerra
Centro de Investigaci
´
on y Desarrollo de Tecnolog
´
ıa Digital, Instituto Polit
´
ecnico Nacional
Avenida del Parque, 1310, 22510 Tijuana, Baja California, Mexico
Keywords:
Base-isolated structures, seismic disturbances, active control.
Abstract:
The main objective of applying robust active control to base-isolated structures is to protect them in the event
of an earthquake. Taking advantage of discontinuous control theory, a static discontinuous active control
is developed using as a feedback only the measure of the velocity at the base. Moreover, due to that in
many engineering applications, accelerometers are the only devices that provide information available for
feedback, our velocity feedback controller could be easily extended by using just acceleration information
through a filter. The main contributions of this paper are: (a) a static velocity feedback controller design,
and (b) a dynamic acceleration feedback controller design, for seismic attenuation of structures. Robustness
performance is analyzed by means of numerical experiments using the 1940 El Centro earthquake.
1 INTRODUCTION
Base isolation has been widely considered as an ef-
fective technology to protect flexible structures up
to eight storeys high against earthquakes. The con-
ceptual objective of the isolator is to produce a dy-
namic decoupling of the structure from its founda-
tion so that the structure ideally behaves like a rigid
body with reduced inter-story drifts, as demanded
by safety, and reduced absolute accelerations as re-
lated to comfort requirements. Although the response
quantities of a fixed-base building are reduced sub-
stantially through base isolation, the base displace-
ment may be excessive, particularly during near-field
ground motions (Yang and Agrawal, 2002). Appli-
cations of hybrid control systems consisting of active
or semi-active systems installed in parallel to base-
isolation bearings have the capability to reduce re-
sponse quantities of base-isolated structures more sig-
nificantly than passive dampers (Ramallo et al., 2002;
Yang and Agrawal, 2002).
In this paper, two versions of a decentralized ro-
bust active control are developed and applied to a
base-isolated structure. The first controller uses the
velocity at the base of the structure as feedback in-
formation, and it is analyzed via Lyapunov stability
techniques as proposed in (Luo et al., 2001). Due
to the fact that, in civil engineering applications, ac-
celerometers are the most practically available sen-
sors for feedback control, the second controller is an
extension of the first one where just acceleration in-
formation is used. Performance of the proposed con-
trollers, for seismic attenuation, are evaluated by nu-
merical simulations using the 1940 El Centro earth-
quake (California, United States).
This paper is structured as follows. Section 2 de-
scribes the problem formulation. The solution to the
problem statement using just velocity measurements
is described in Section 3, meanwhile the solution em-
ploying only acceleration information is stated in Sec-
tion 4. Numerical simulations to analyze the perfor-
mance of both proposed controllers are presented in
Section 5. Finally, on Section 6 final comments are
stated.
2 PROBLEM STATEMENT
Consider a basic forced vibration system governed
by:
m ¨x + c ˙x + Φ(x,t) = f (t) + u (t), (1)
277
Pozo F., Rodellar J., Acho L. and Guerra R. (2007).
ROBUST CONTROL OF HYSTERETIC BASE-ISOLATED STRUCTURES UNDER SEISMIC DISTURBANCES.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 277-282
DOI: 10.5220/0001639202770282
Copyright
c
SciTePress

Base
Active Controller
Isolator
Foundation
Earthquake
m
c
f(t) = -ma(t)
u(t)
Φ
Figure 1: Building structure with hybrid control system (up)
and physical model (down).
where m is the mass; c is the damping coefficient; Φ
is the restoring force characterizing the hysteretic be-
havior of the isolator material, which is usually made
with inelastic rubber bearings; f (t) is the unknown
excitation force; and u(t) is the control force supplied
by an appropriate actuator.
In structure systems, f (t) = −m ¨x
g
(t) is the exci-
tation force, where ¨x
g
(t) is the earthquake ground ac-
celeration. The restoring force Φ can be represented
by the Bouc-Wen model (Ikhouane et al., 2005) in the
following form:
Φ(x,t) = αKx (t) + (1 − α) DKz (t) (2)
˙z = D
−1
A ˙x − β| ˙x||˙z|
n−1
z − λ ˙x|z|
n
(3)
where Φ(x,t) can be considered as the superposition
of an elastic component αKx and a hysteretic com-
ponent (1 − α)DKz(t), in which the yield constant
displacement is D > 0 and α ∈ [0, 1] is the post- to
pre-yielding stiffness ratio. n ≥ 1 is a scalar that gov-
erns the smoothness of the transition from elastic to
plastic response and K > 0. The hysteretic part in (2)
involves an internal dynamic (3) which is unmeasur-
able, and thus inaccessible for seismic control design.
A schematic description of the base-isolated system
structure and its physical model are displayed in Fig.
1.
The following assumptions are stated for system (1)-
(3):
Assumption 1 The acceleration disturbance f (t) =
−m ¨x
g
is unknown but bounded; i.e., there exists a
known constant F such that | f (t)| ≤ F, ∀t ≥ 0.
Assumption 2 In the event of an earthquake, it is as-
sumed that z(0) = 0 in equation (1) and that the struc-
ture is at rest; i.e., x(0) = ˙x(0) = 0.
Assumption 3 There exists a known upper bound
on the internal dynamic variable z(t), i.e., |z(t)| ≤
¯
ρ
z
, ∀t ≥ 0.
Assumption 1 is standard in control of hysteretic
systems or base-isolated structures (Ikhouane et al.,
2005). Assumption 2 has a physical meaning be-
cause it is assumed that the structure is at rest when
the earthquake strikes it. The upper bound in z(t)
expressed in Assumption 3 is computable, indepen-
dently on the boundedness of x(t) by invoking Theo-
rem 1 in (Ikhouane et al., 2005).
Control objective: Our objective is to design a ro-
bust controller for system (1) such that, under earth-
quake attack, the trajectories of the closed-loop re-
main bounded.
To this end, the theorems in the following sections
satisfy this control objective.
3 SEISMIC ATTENUATION
USING ONLY VELOCITY
FEEDBACK
Theorem 1 Consider the nonlinear system (1)-(3)
subject to Assumptions 1-3. Then, the following con-
trol law
u = −ρsgn( ˙x
0
) (4)
solves the control objective if
ρ ≥ (1 − α)DK
¯
ρ
z
+ F. (5)
Proof. The closed-loop system (1)-(3) and (4)
yields
m
0
¨x
0
+ c
0
˙x
0
+ k
0
x
0
+ Φ(x
0
,t) = −m
0
¨x
g
− ρsgn( ˙x
0
)
m
0
¨x
0
+ c
0
˙x
0
+ (k
0
+ αK)x
0
= −ρsgn( ˙x
0
) + ∆(z, t)
(6)
where
∆(z,t) = −m
0
¨x
g
− (1 − α)Dkz.
Then
|∆(z,t)| ≤ | f (t)| + |(1 − α)DKz|
≤ F + (1 − α)DK|z|
≤ F + (1 − α)DK
¯
ρ
z
= ρ
1
.
Given the Lyapunov function
V (x
0
, ˙x
0
) =
k
0
+ αK
2
x
2
0
+
m
0
2
˙x
2
0
,
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
278

its time derivative along the trajectories of the closed-
loop system (1)-(3) and (4) yields
˙
V (x
0
, ˙x
0
) = (k
0
+ αK)x
0
˙x
0
+ m
0
˙x
0
¨x
0
= ˙x
0
[(k
0
+ αK)x
0
+ m
0
¨x
0
]
= ˙x
0
[−c
0
˙x
0
− ρsgn( ˙x
0
) + ∆(z, t)]
= −c
0
˙x
2
0
− ρ ˙x
0
sgn( ˙x
0
) + ˙x
0
∆(z,t)
= −c
0
˙x
2
0
− ρ| ˙x
0
| + ˙x
0
∆(z,t)
≤ −c
0
˙x
2
0
− ρ| ˙x
0
| + | ˙x
0
|ρ
1
= −c
0
˙x
2
0
+ (ρ
1
− ρ)| ˙x
0
|.
The choice of ρ ≥ ρ
1
makes
˙
V negative semidefinite,
as we wanted to show.
Remark 1 (on solution of non-smooth systems)
The closed-loop system (6) has a non-smooth right-
hand side, the signum function. Solutions to this
non-smooth class of systems in the sense of Filippov
has been widely studied (Wu et al., 1998). It is worth
noting that non-smooth dynamic systems appear
naturally and frequently in many mechanical systems
(Wu et al., 1998). Due to the fact that classical
solution theories to ordinary differential equations
require vector fields to be at least Lipschitz con-
tinuous, main difficulties with non-smooth systems
are that these systems fail the Lipschitz-continuous
requirement. However, if (a) the vector field is
measurable and essentially bounded; (b) the solution
of the system is absolutely continuous; and (c) the
Lyapunov function V is continuous and positive def-
inite and its time derivative
˙
V along the trajectories
of the closed-loop system is continuous and negative
semi-definite, then the system under consideration
has a solution in the sense of Filippov and it is stable
in the sense of Lyapunov (Wu et al., 1998). This is
exactly our case.
Remark 2 The signum function in the control law in
Theorem 1 –common in sliding mode control theory–
produces chattering (Utkin, 1982; Edwards and Spur-
geon, 1998). One way to avoid chattering is to re-
place the signum function by a smooth sigmoid-like
function such as
ν
δ
(s) =
s
|s| + δ
,
where δ is a sufficiently small positive scalar (Ed-
wards and Spurgeon, 1998).
Consequently, the following Corollary is stated:
Corollary 1 Consider the nonlinear system (1)-(3)
subject to Assumptions 1-3. Then, the following con-
trol law
u = −ρ
˙x
0
| ˙x
0
| + δ
(7)
solves the control objective if
ρ ≥ (1 − α)DK
¯
ρ
z
+ F
and δ is a sufficiently small positive scalar.
Proof. The time derivative of the Lyapunov func-
tion
V (x
0
, ˙x
0
) =
k
0
+ αK
2
x
2
0
+
m
0
2
˙x
2
0
,
along the trajectories of the closed-loop system (1)-
(3) and (7) yields
˙
V = (k
0
+ αK)x
0
˙x
0
+ m
0
˙x
0
¨x
0
= ˙x
0
[(k
0
+ αK)x
0
+ m
0
¨x
0
]
= ˙x
0
−c
0
˙x
0
− ρ
˙x
0
| ˙x
0
| + δ
+ ∆(z,t)
= −c
0
˙x
2
0
− ρ ˙x
0
˙x
0
| ˙x
0
| + δ
+ ˙x
0
∆(z,t)
= −c
0
˙x
2
0
− ρ
˙x
2
0
| ˙x
0
| + δ
+ ˙x
0
∆(z,t)
≤ −c
0
˙x
2
0
+ ρ
1
| ˙x
0
| − ρ
˙x
2
0
| ˙x
0
| + δ
= −c
0
˙x
2
0
− (ρ − ρ
1
)| ˙x
0
| + ρ
| ˙x
0
| −
˙x
2
0
| ˙x
0
| + δ
.
The objective of guaranteeing global boundedness of
solutions is equivalently expressed as rendering
˙
V
negative outside a compact region. The choice of
ρ ≥ ρ
1
and considering that
lim
δ→0
ρ
| ˙x
0
| −
˙x
2
0
| ˙x
0
| + δ
= 0
guarantees the existence of a small compact region
D ⊂ R
2
(depending on δ) such that
˙
V is negative out-
side this set. This implies that all the closed-loop tra-
jectories remain bounded, as we wanted to show.
4 SEISMIC ATTENUATION
USING ONLY ACCELERATION
FEEDBACK
Motivated by the fact that in many civil engineering
applications accelerometers are the only devices that
provide information available for feedback, Theorem
2 (below) presents a control law based on equation (4)
where only acceleration information is required.
Theorem 2 Consider the nonlinear system (1)-(3)
subject to Assumptions 1-3. Then, the following con-
trol law
u = −ρsgn(υ) (8)
˙
υ = ¨x
0
(9)
ROBUST CONTROL OF HYSTERETIC BASE-ISOLATED STRUCTURES UNDER SEISMIC DISTURBANCES
279

solves the control objective if
ρ ≥ (1 − α)DK
¯
ρ
z
+ F.
Proof. This proof is straightforward by consider-
ing direct integration of equation (9).
Remark 3 In the practical implementation of this
control law, ν may drift due to unmodeled dynam-
ics, measure errors and disturbance. To avoid this,
the following σ-modification (Ioannou and Kokotovic,
1983; Koo and Kim, 1994) can be used,
u = −ρsgn(υ), (10)
˙
υ = −σν + ¨x
0
, (11)
where σ is a positive constant.
As in the previous Section, a smooth version of
the control law in equations (10)-(11) is considered in
the following Corollary.
Corollary 2 Consider the nonlinear system (1)-(3)
subject to Assumptions 1-3. Then, the following con-
trol law
u = −ρ
υ
|υ| + δ
(12)
˙
υ = −συ + ¨x
0
(13)
solves the control objective if
ρ ≥ (1 − α)DK
¯
ρ
z
+ F,
where σ > 0 and δ are sufficiently small positive
scalar.
5 NUMERICAL SIMULATIONS
In order to investigate the efficiency of the pro-
posed controllers, we set m = 156 × 10
3
kg, K =
6 × 10
6
N/m, c = 2 × 10
4
Ns/m, α = 0.6, D = 0.6 m,
λ = 0.5, β = 0.1, n = 3, and A = 1 (Ikhouane et al.,
2005). A set of numerical experiments was per-
formed on the system using information recorded dur-
ing the 1940 El Centro earthquake. Figure 2 shows
the ground acceleration for this earthquake. The open
loop base displacement can also be seen in Figure 2.
It can be seen that ρ = 2 · 10
5
is an upper bound for
the expression (1 − α)DK
¯
ρ
z
+ F in equation (5).
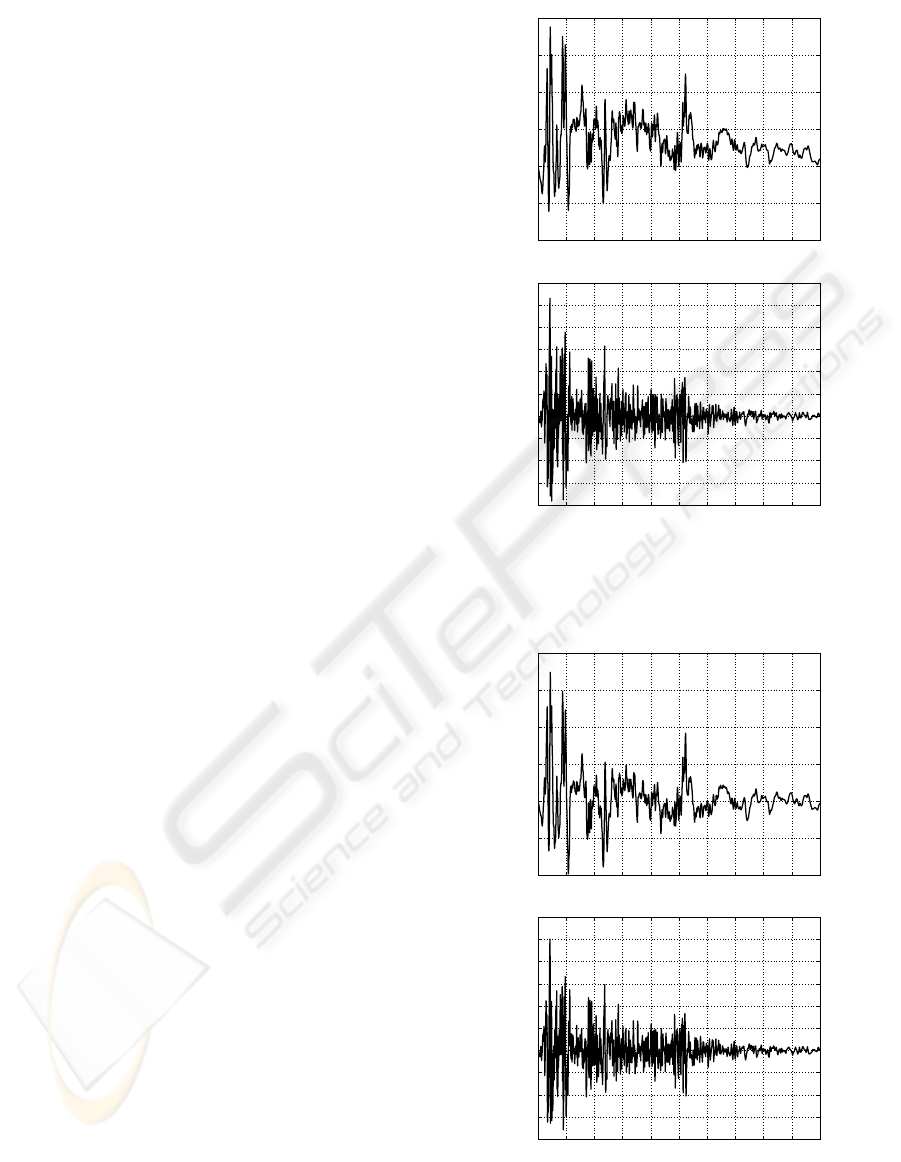
Figures 3, 4 and 5 display the time histories of the
motion of the base and the control signal force for dif-
ferent values of ρ and δ, when the control law in equa-
tion (7) is used. In an equivalent manner, the time his-
tories of the motion of the base and the control signal
force when the control law in equations (12)-(13) is
used are depicted in Figures 6, 7 and 8. In both cases,
the controlled base displacements are significantly re-
duced compared to the uncontrolled case. It is worth
noting that, when σ = 0.1 in Figure 8, the results are
similar to those in Figure 3.
0 5 10 15 20 25 30 35 40 45 50
−3
−2
−1
0
1
2
3
4
Time (s)
Ground acceleration (m/s
2
)
El Centro earthquake
0 5 10 15 20 25 30 35 40 45 50
−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
Time (s)
Displacement (m)
Open−loop base displacement
Figure 2: 1940 El Centro earthquake, ground acceleration
(top); open loop base displacement (bottom).
6 CONCLUSION
A robust control scheme to attenuate the conse-
quences of seismic events on base-isolated structures
has been proposed. It has been shown that a sim-
ple controller can fulfill the control objectives, using
just velocity measurements or just acceleration infor-
mation. Simulation results showed the good perfor-
mance of the controllers. In civil engineering, the
controller that just uses acceleration information is of
a great interest, due to the fact that accelerometers are
easily available. Also, the simplicity of the proposed
controllers makes them attractive for a real implemen-
tation.
REFERENCES
Edwards, C. and Spurgeon, S. K. (1998). Sliding Mode
Control. Theory and Applications. Taylor and Fran-
cis, London.
Ikhouane, F., Ma
˜
nosa, V., and Rodellar, J. (2005). Adaptive
control of a hysteretic structural system. Automatica,
41(2):225–231.
Ioannou, P. and Kokotovic, P. (1983). Adaptive System with
Reduced Models. Springer-Verlag, New York.
Koo, K.-M. and Kim, J.-H. (1994). Robust control of
robot manipulators with parametric uncertainty. IEEE
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
280
Transactions on Automatic Control, 39(6):1230–
1233.
Li, H. and Ou, J. (2006). A design approach for semi-active
and smart base-isolated buildings. Structural Control
and Health Monitoring, 13(2):660–681.
Luo, N., Rodellar, J., Veh
´
ı, J., and De la Sen, M. (2001).
Composite semiactive control of a class of seismically
excited structures. Journal of The Franklin Institute,
338:225–240.
Makris, N. (1997). Rigidity–plasticity–viscosity: can elec-
trorheological dampers protect base-isolated struc-
tures from near-source ground motions? Earthquake
Engineering and Structural Dynamics, 26(5):571–
591.
Pozo, F., Ikhouane, F., Pujol, G., and Rodellar, J. (2006).
Adaptive backstepping control of hysteretic base-
isolated structures. Journal of Vibration and Control,
12(4):373–394.
Ramallo, J., Yoshioka, M., and Spencer, B. (2004). A
two-step identification technique for semiactive con-
trol systems. Structural Control and Health Monitor-
ing, 11(4):273–279.
Ramallo, J. C., Johnson, E. A., and Spencer, B. F. (2002).
Smart base isolation systems. Journal of Engineering
Mechanics, 128(10):1088–1099.
Smyth, A., Masri, S., Kosmatopoulos, E., Chassiakos, A.,
and Caughey, T. (2002). Development of adaptive
modeling techniques for non-linear hysteretic sys-
tems. International Journal of Non-Linear Mechan-
ics, 37(8):1435–1451.
Spencer, B., Dyke, S., Sain, M., and Carlson, J.
(1997). Phenomenological model for magnetorheo-
logical dampers. Journal of Engineering Mechanics -
Proceedings of the ASCE, 123(3):230–238.
Spencer, B. and Sain, M. (1997). Controlling buildings: a
new frontier in feedback. IEEE Control Systems Mag-
azine, 17(6):19–35.
Spooner, J., Ord
´
o
˜
nez, R., Maggiore, M., and Passino, K.
(2001). Stable Adaptive Control and Estimation for
Nonlinear Systems: Neural and Fuzzy Approximation
Techniques. John Wiley & Sons, Inc., New York, NY,
USA.
Utkin, V. (1982). Sliding Modes in Control and Optimiza-
tion. Springer-Verlag, Berlin.
Wu, Q., Onyshko, S., Sepheri, N., and Thornton-Trump,
A. B. (1998). On construction of smooth lyapunov
functions for non-smooth systems. International Jour-
nal of Control, 69(3):443–457.
Yang, J. N. and Agrawal, A. K. (2002). Semi-active hybrid
control systems for nonlinear buildings against near-
field earthquakes. Engineering Structures, 24(3):271–
280.
Yoshioka, H., Ramallo, J., and Spencer, B. (2002). Smart
base isolation strategies employing magnetorheologi-
cal dampers. Journal of Engineering Mechanics - Pro-
ceedings of the ASCE, 128(5):540–551.
0 5 10 15 20 25 30 35 40 45 50
−2
−1
0
1
2
3
4
x 10
−4
Time (s)
Displacement (m)
Closed−loop base displacement
0 5 10 15 20 25 30 35 40 45 50
−4
−3
−2
−1
0
1
2
3
4
5
6
x 10
5
time (s)
Force (N)
Control effort
Figure 3: Closed loop base displacement (top) and control
signal force (bottom) with control law in equation (7) and
parameters ρ = 2 · 10
6
and δ = 0.01.
0 5 10 15 20 25 30 35 40 45 50
−2
−1
0
1
2
3
4
x 10
−3
Time (s)
Displacement (m)
Closed−loop base displacement
0 5 10 15 20 25 30 35 40 45 50
−4
−3
−2
−1
0
1
2
3
4
5
6
x 10
5
time (s)
Force (N)
Control effort
Figure 4: Closed loop base displacement (top) and control
signal force (bottom) with control law in equation (7) and
parameters ρ = 2 · 10
6
and δ = 0.1.
ROBUST CONTROL OF HYSTERETIC BASE-ISOLATED STRUCTURES UNDER SEISMIC DISTURBANCES
281

0 5 10 15 20 25 30 35 40 45 50
−2
−1
0
1
2
3
4
x 10
−3
Time (s)
Displacement (m)
Closed−loop base displacement
0 5 10 15 20 25 30 35 40 45 50
−1.5
−1
−0.5
0
0.5
1
1.5
2
x 10
5
time (s)
Force (N)
Control effort
Figure 5: Closed loop base displacement (top) and control
signal force (bottom) with control law in equation (7) and
parameters ρ = 2 · 10
5
and δ = 0.01.
0 5 10 15 20 25 30 35 40 45 50
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
3
3.5
x 10
−5
Time (s)
Displacement (m)
Closed−loop base displacement
0 5 10 15 20 25 30 35 40 45 50
−4
−3
−2
−1
0
1
2
3
4
5
6
x 10
4
time (s)
Force (N)
Control effort
Figure 6: Closed loop base displacement (top) and control
signal force (bottom) with control law in equations (12)-
(13) and parameters ρ = 2 · 10
6
, δ = 0.01 and σ = 0.1.
0 5 10 15 20 25 30 35 40 45 50
−2
−1
0
1
2
3
4
x 10
−4
Time (s)
Displacement (m)
Closed−loop base displacement
0 5 10 15 20 25 30 35 40 45 50
−4
−3
−2
−1
0
1
2
3
4
5
6
x 10
4
time (s)
Force (N)
Control effort
Figure 7: Closed loop base displacement (top) and control
signal force (bottom) with control law in equations (12)-
(13) and parameters ρ = 2 · 10
6
, δ = 0.1 and σ = 0.1.
0 5 10 15 20 25 30 35 40 45 50
−4
−3
−2
−1
0
1
2
3
4
5
x 10
−5
Time (s)
Displacement (m)
Closed−loop base displacement
0 5 10 15 20 25 30 35 40 45 50
−4
−3
−2
−1
0
1
2
3
4
5
6
x 10
4
time (s)
Force (N)
Control effort
Figure 8: Closed loop base displacement (top) and control
signal force (bottom) with control law in equations (12)-
(13) and parameters ρ = 2 · 10
6
, δ = 0.01 and σ = 1.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
282
