
COMPARING COMBINATIONS OF FEATURE REGIONS FOR
PANORAMIC VSLAM
Arnau Ramisa, Ram
´
on L
´
opez de M
´
antaras
Artificial Intelligence Research Institute, UAB Campus, 08193, Bellaterra, Spain
David Aldavert, Ricardo Toledo
Computer Vision Center, UAB Campus, 08193, Bellaterra, Spain
Keywords:
Affine covariant regions, local descriptors, interest points, matching, robot navigation, panoramic images.
Abstract:
Invariant (or covariant) image feature region detectors and descriptors are useful in visual robot navigation
because they provide a fast and reliable way to extract relevant and discriminative information from an image
and, at the same time, avoid the problems of changes in illumination or in point of view. Furthermore, com-
plementary types of image features can be used simultaneously to extract even more information. However,
this advantage always entails the cost of more processing time and sometimes, if not used wisely, the perfor-
mance can be even worse. In this paper we present the results of a comparison between various combinations
of region detectors and descriptors. The test performed consists in computing the essential matrix between
panoramic images using correspondences established with these methods. Different combinations of region
detectors and descriptors are evaluated and validated using ground truth data. The results will help us to find
the best combination to use it in an autonomous robot navigation system.
1 INTRODUCTION
Autonomous robot navigation is one of the most chal-
lenging problems of mobile robotics and, although it
has been widely studied, it is far from being solved
completely. To date, the most successful approaches
are a set of techniques known as SLAM (Simul-
taneous Localization And Mapping) (Thrun, 2002).
These methods consist in iteratively searching for an
optimal solution to both problems: self localization
and map building. SLAM methods can be classified
amongst three main categories: metric SLAM, for
methods that give an accurate localization and map-
ping (Thrun, 2002; Castellanos and Tardos, 2000);
topologic SLAM, where the environment is usually
represented as a graph of “places” and the connectiv-
ity information amongst them (Tapus and Siegwart,
2006); and finally hybrid approaches, which try to
combine the advantages of both techniques and re-
duce their drawbacks (Tomatis et al., 2002).
To correct the accumulative errors of odometry,
SLAM techniques use additional information from
the environment acquired with sensors like sonars,
laser range-scanners, etc. When a camera is used
to obtain such data, the method is known as Visual
SLAM. Recently, this approach has gained strength
thanks to the development of new computer vision
algorithms that extract discriminative and meaningful
information from the images. One promising line of
research consists in using invariant visual features
extracted from images to construct a map of the
environment and locate the robot in it (Se et al., 2001;
Booij et al., 2006; Ramisa et al., 2006). The core
of these methods consist in finding corresponding
features between two or more images acquired by the
robot and set up relations between the places where
this images were taken. One particularly interesting
subset of invariant features are the affine covariant
regions, which can be correctly detected in a wide
range of acquisition conditions (Mikolajczyk et al.,
2005). Equally important are the local descriptors
such as SIFT (Lowe, 2004), which make the match-
ing of local regions acquired in different conditions
possible.
In (Ramisa et al., 2006), the authors developed a
topological localization method which uses constel-
lations of affine covariant regions from a panoramic
292
Ramisa A., López de Mántaras R., Aldavert D. and Toledo R. (2007).
COMPARING COMBINATIONS OF FEATURE REGIONS FOR PANORAMIC VSLAM.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 292-297
DOI: 10.5220/0001642602920297
Copyright
c
SciTePress

image to describe a place (for example a room).
When a new panorama of features is acquired, it is
compared to all the stored panoramas of the map, and
the most similar one is selected as the location of the
robot. Using different types of feature detectors and
descriptors simultaneously increases the probability
of finding good correspondences, but at the same time
can cause other problems, such as more processing
time and more false correspondences. As means
to improve the results of their approach, in this
article various of these covariant region detectors
and descriptors are compared. Our objective is to
evaluate the performance of different combinations of
these methods in order to find the best one for visual
navigation of an autonomous robot. The results of
this comparison will reflect the performance of these
detectors and descriptors under severe changes in
the point of view in a real office environment. With
the results of the comparison, we intend to find the
combination of detectors and descriptors that gives
better results with widely separated views.
The remainder of the paper is organized as fol-
lows. Section 2 provides some background informa-
tion in affine covariant region detectors and descrip-
tors. Section 3 explains the experimental setup used
in the comparison and section 4 presents the results
obtained. Finally, in section 5 we close the paper with
the conclusions.
2 DETECTORS AND
DESCRIPTORS
Affine covariant regions can be defined as sets of pix-
els with high information content, which usually cor-
respond to local extrema of a function over the im-
age. A requirement for these type of regions is that
they should be covariant with transformations intro-
duced by changes in the point of view, which makes
them well suited for tasks where corresponding points
between different views of a scene have to be found.
In addition, its local nature makes them resistant to
partial occlusion and background clutter.
Various affine covariant region detectors have
been developed recently. Furthermore, different
methods detect different types of features, for ex-
ample Harris-Affine detects corners while Hessian-
Affine detects blobs. In consequence, multiple re-
gion detectors can be used simultaneously to increase
the number of detected features and thus of potential
matches.
However, using various region detectors can also
introduce new problems. In applications such as VS-
LAM, storing an arbitrary number of different affine
covariant region types can increase considerably the
size of the map and the computational time needed
to manage it. Another problem may arise if one of
the region detectors or descriptors gives rise to a high
amount of false matches, as the mismatches can con-
fuse the model fitting method and a worse estimation
could be obtained.
Recently Mikolajczyk et al. (Mikolajczyk et al.,
2005) reviewed the state of the art of affine covari-
ant region detectors individually. Based on Mikola-
jczyk et al. work, we have chosen three types of affine
covariant region detectors for our evaluation of com-
binations: Harris-Affine, Hessian-Affine and MSER
(Maximally Stable Extremal Regions). These three
region detectors have a good repeatability rate and a
reasonable computational cost.
Harris-Affine first detects Harris corners in the
scale-space using the approach proposed by Linde-
berg (Lindeberg, 1998). Then the parameters of an
elliptical region are estimated minimizing the differ-
ence between the eigenvalues of the second order mo-
ment matrix of the selected region. This iterative pro-
cedure finds an isotropic region, which is covariant
under affine transformations.
The Hessian-Affine is similar to the Harris-Affine,
but the detected regions are blobs instead of corners.
Local maximums of the determinant of the Hessian
matrix are used as base points, and the remainder of
the procedure is the same as the Harris-Affine.
The Maximally Stable Extremal region detector
proposed by Matas et al. (Matas et al., 2002) detects
connected components where the intensity of the pix-
els is several levels higher or lower than all the neigh-
boring pixels of the region.
Matching local features between different views
implicitly involves the use of local descriptors. Many
descriptors with wide-ranging degrees of complexity
exist in the literature. The most simplest descriptor
is the region pixels alone, but it is very sensitive to
noise and illumination changes. More sophisticated
descriptors make use of image derivatives, gradient
histograms, or information from the frequency do-
main to increase the robustness.
Recently, Mikolajczyk and Schmid published a
performance evaluation of various local descriptors
(Mikolajczyk and Schmid, 2005). In this review more
than ten different descriptors are compared for affine
transformations, rotation, scale changes, jpeg com-
pression, illumination changes, and blur. The conclu-
sions of their analysis showed an advantage in per-
formance of the Scale Invariant Feature Transform
(SIFT) introduced by Lowe (Lowe, 2004) and one of
its variants: Gradient Location Orientation Histogram
COMPARING COMBINATIONS OF FEATURE REGIONS FOR PANORAMIC VSLAM
293

(GLOH) (Mikolajczyk and Schmid, 2005). Based on
these results, we use these two local descriptors in our
experiments. Both SIFT and GLOH descriptors di-
vide the affine covariant region in several subregions
and construct a histogram with the orientations of the
gradient for each subregion. The output of both meth-
ods is a 128-dimension descriptor vector computed
from the histograms.
3 EXPERIMENTAL SETUP
In this section, we describe our experimental setup.
The data set of images is composed of six sequences
of panoramas from different rooms of our research
center. Each sequence consists of 11 to 25 panoramas
taken every 20 cm. moving along a straight line prede-
fined path. The panoramas have been constructed by
stitching together multiple views taken from a fixed
optical center with a Directed Perception PTU-46-70
pan-tilt unit and a Sony DFW-VL500 camera.
Apart from the changes in point of view, the
images exhibit different problems such as illumina-
tion changes, repetitive textures, wide areas with no
texture and reflecting surfaces. These nuisances are
common in uncontrolled environments.
From each panorama, a constellation of affine co-
variant regions is extracted and the SIFT and the
GLOH descriptors are computed for each region. In
Figure 1 a fragment of a panorama with several de-
tected Hessian-Affine regions can be seen.
To find matches between the feature constellations
of two panoramas, the matching method proposed by
Lowe in (Lowe, 2004) is used. According to this strat-
egy, one descriptor is compared using euclidean dis-
tance with all the descriptors of another constellation,
and the nearest-neighbor wins. Bad matches need to
be rejected, but a global threshold on the distance
is impossible to be found for all situations. Instead,
Lowe proposes to compare the nearest-neighbor and
the second nearest-neighbor distances and reject the
point if the ratio is greater than a certain value, which
typically is 0.8. Lowe determined, using a database
of 40,000 descriptors, that rejecting all matches with
a distance ratio higher than this value, 90% of the
false matches were eliminated while only 5% of cor-
rect matches were discarded.
Finally, the matches found comparing the de-
scriptors of two constellations are used to estimate
the essential matrix between the two views with the
RANSAC algorithm. As in the case of conventional
cameras, the essential matrix in cylindrical panoramic
cameras verifies,
p
⊤
0
Ep
1
= 0, (1)
where p
0
and p
1
are projections of a scene point P
in the two cylindrical images related by the essential
matrix E. However, the epipolar constraint defines a
sinusoid instead of a line. This sinusoid can be pa-
rameterized with the following equation,
z
1
(φ) = −
n
x
cos(φ) + n
y
sin(φ)
n
z
, (2)
where z
1
(φ) is the height corresponding to the an-
gle φ in the panorama, n
1
= [n
x
, n
y
, n
z
] is the epipolar
plane normal, obtained with the following expression,
n
1
= p
⊤
0
E. (3)
The test performed consists in estimating the es-
sential matrix between the first panorama of the se-
quence and all the remaining panoramas using dif-
ferent combinations of detectors and descriptors. As
random false matches will rarely define a widely sup-
ported epipolar geometry, finding a high number of
inliers reflects a good performance. To validate the
results, ground truth essential matrices between the
reference image and all the other images of each
sequence have been computed using manually se-
lected corresponding points. These essential matrices
are then used to compute the error of the inliers of
each combination of detectors and descriptors to the
ground truth epipolar sinusoid.
Figure 1: Some Hessian-Affine regions in a fragment of a
panorama.
4 RESULTS
To evaluate the performance of each combination
of methods, we measured the maximum distance at
which each combination of methods passed the three
different tests that are explained in the following para-
graph. The results of the tests are presented in the Ta-
ble 1. It is important to notice that these distances are
the mean across all the panorama sequences.
Since a minimum of 7 inliers are required in or-
der to find the essential matrix, the first test shows
at which distance each method achieves less than 7
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
294
inliers. For the second test, the inliers that do not fol-
low equation 1 for the ground truth essential matri-
ces are rejected as false matches. Again, the distance
at which the number of correct inliers drops below 7
is checked. Finally, the third test evaluates at which
distance the percentage of correct inliers drops below
50%, which is the theoretic breakdown point for the
RANSAC algorithm. This third test is the hardest and
the more realistic one.
Table 1: Results of the comparison. For convenience
we have labeled M:MSER, HA:Harris-Affine, HE:Hessian-
Affine, S:SIFT, G:GLOH.
Test 1 Test 2 Test 3
M+G 180cm 140cm 83cm
HA+G 320cm 200cm 106cm
HE+G 380cm 220cm 108cm
M+S 180cm 120cm 84cm
HA+S 400cm 220cm 101cm
HE+S 480cm 200cm 107cm
M+HE+G 480cm 200cm 106cm
HA+HE+G 480cm 220cm 100cm
M+HA+G 480cm 220cm 99cm
M+HE+S 480cm 180cm 99cm
HA+HE+S 480cm 260cm 111cm
M+HE+S 480cm 220cm 109cm
M+HA+HE+G 480cm 240cm 87cm
M+HA+HE+S 480cm 260cm 82cm
The results of the first test show that, except for
the Hessian-Affine and SIFT, the combination of
various detectors performs better than one detector
alone. In the second test we can see that the per-
formance of all the methods is greately reduced,
and the combination of two methods (except for the
Harris-Affine, Hessian-Affine and SIFT) drops to a
similar level to that of one method alone. Finally,
regarding the third test, the performance drops again,
putting all combinations at a similar level (around
100 cm). For the third test an exponential function
has been fitted to the data sets to aproximate the
behaviour of the noisy data and find the estimated
point where the ratio falls below 0.5.
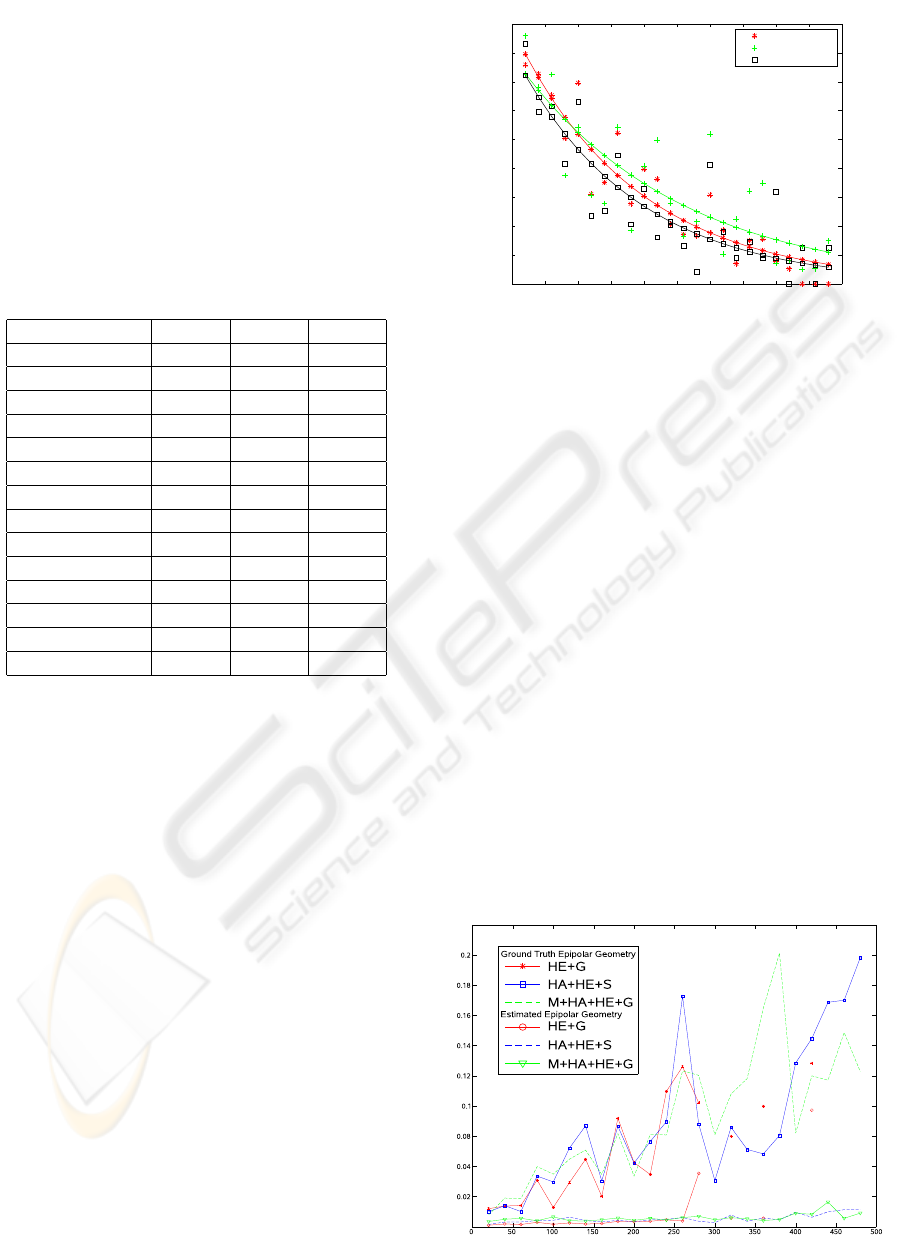
In Figure 2 the ratio of inliers for the best
combinations of each category is shown (namely,
Harris-Affine and GLOH, Hessian-Affine and Harris-
Affine and SIFT, and all the detectors and GLOH)
as well as the fitted exponential of each of the three
combinations. As can be observed in the point’s
cloud, the method using two regions in general
achieved better results than the other two methods,
and several times achieved a performance above 0.5
after the estimated point.
0 50 100 150 200 250 300 350 400 450 500
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
cm.
One Region
Two Regions
Three Regions
Figure 2: Ratio of inliers for the best combinations of one
region (Hessian-Affine and GLOH), two regions (Harris-
Affine and Hessian-Affine and SIFT) and three regions
(MSER, Harris-Affine, Hessian-Affine and GLOH). Addi-
tionally, the exponential fitting of the different data sets is
shown.
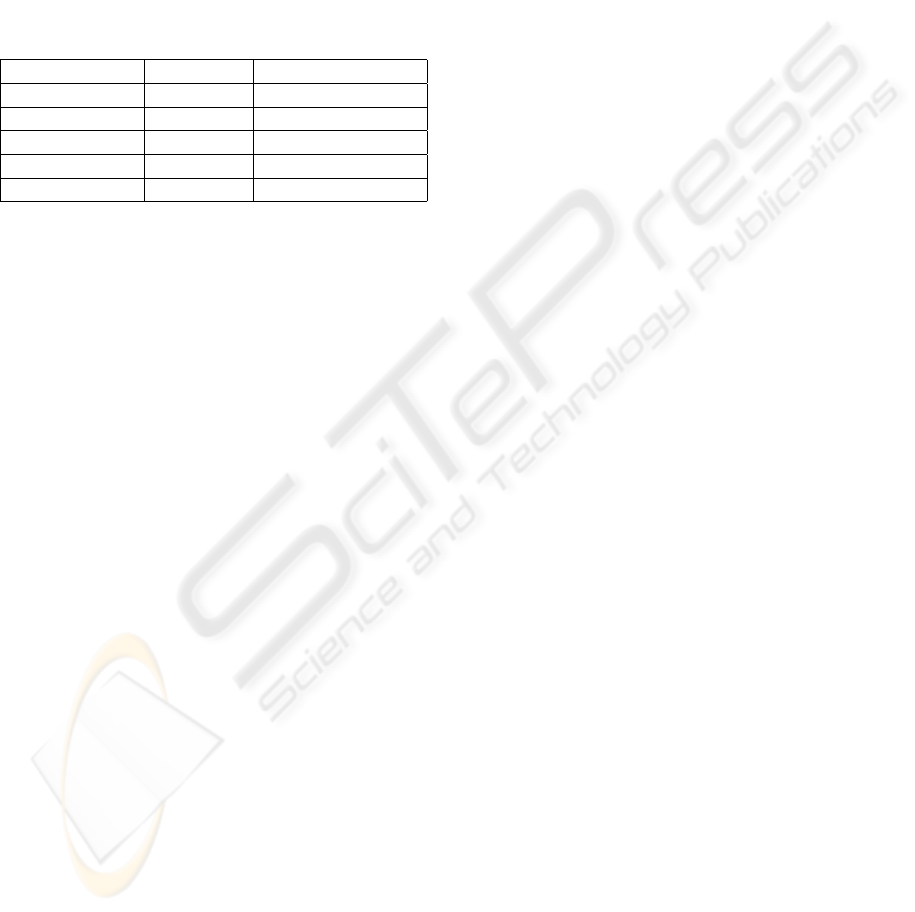
To obtain an estimation of the precision, the
mean distance error of the inliers to the estimated
epipolar sinusoid and the corresponding ground truth
epipolar sinusoid has been computed for the three
selected combinations (Hessian-Affine and GLOH,
Hessian-Affine and Harris-Affine and SIFT, and
all the detectors and GLOH). The results of this
comparison are presented in figure 3. It can be seen
that for the first 250 cm. all the methods have a
similar error, both for the estimated epipolar sinusoid
and for the ground truth one. Discontinuities are due
to failures of the combinations to compute a valid
essential matrix at a given distance.
Finally, a performance test has been done to com-
pare the processing speed of the different region de-
tectors and descriptors. This results, shown in Table
Figure 3: Mean distance error of a match to the estimated
epipolar sinusoid and to the ground truth epipolar sinusoid.
COMPARING COMBINATIONS OF FEATURE REGIONS FOR PANORAMIC VSLAM
295
2, are the mean of 50 runs of a 4946x483 panoramic
image. The implementation used to perform the tests
is the one given in
http://www.robots.ox.ac.uk/
˜
vgg/research/affine/
by the authors of the dif-
ferent region detectors (Mikolajczyk et al., 2005). It
is important to note that this implementations are not
optimal, and a constant disk reading and writting time
is entailed. The tests where done in a AMD Athlon
3000MHz computer.
Table 2: Time Comparision of the different region detectors
and descriptors.
Time (sec) Regions Processed
MSER 0.95 828
Harris-Affine 8.47 3379
Hessian-Affine 3.34 1769
SIFT 14.87 3379
GLOH 16.64 3379
5 CONCLUSIONS
In this paper, we have evaluated different combina-
tions of affine covariant region detectors and descrip-
tors to correclty estimate the essential matrix between
pairs of panoramic images. It has been shown that the
direct combination of region detectors finds a higher
number of corresponding points but this, in general,
does not translate in a direct improvement of the final
result, because also a higher number of new outliers
are introduced.
No significant differences in performance have
been found between the detectors individually, except
that MSER is notably faster than the other methods
thanks to its very simple algorithm; nevertheless the
detected regions are very robust. However MSER
finds a low number of regions and, as the robot moves
away from the original point, the matches become to
few to have a reliable estimation of the essential ma-
trix. Regarding combinations of two region detectors,
they find estimations of the essential matrix at longer
distances. However, as shown in the results, the dis-
tance at which the estimations are reliable is similar to
that of one detector alone. Finally, the combinations
of three descriptors have shown to perform worse than
the combinations of two. The reason is probably the
number of false matches, that confuse the RANSAC
method.
Regarding the descriptors, no significant differ-
ences have been found between the SIFT and the
GLOH. The GLOH gives a slightly better perfor-
mance than the SIFT, but also requires a bit more pro-
cessing time.
Additionally we have found the practical limits in
distance between the panoramic images in order to
have a reliable estimation using these methods. This
value can be used as the distance that a robot using
this method to navigate in an office environment is
allowed to travel before storing a new node in the
map.
Future work includes experimentig with a larger
data set and with different kinds of environments to
verify and extend the presented results. Another in-
teresting line of continuation would be investigating
better matching and model fitting methods to reduce
the proportion of false matches, and also researching
ways to combine the different types of regions taking
into account the scene content or estimated reliability
of each region detector.
ACKNOWLEDGEMENTS
The authors want to thank Adriana Tapus for her valu-
able comments and help. This work has been par-
tially supported by the FI grant from the Generali-
tat de Catalunya, the European Social Fund and the
MID-CBR project grant TIN2006-15140-C03-01 and
FEDER funds.
REFERENCES
Booij, O., Zivkovic, Z., and Kr
¨
ose, B. (2006). From sensors
to rooms. In Proc. IROS Workshop From Sensors to
Human Spatial Concepts, pages 53–58. IEEE.
Castellanos, J. A. and Tardos, J. D. (2000). Mobile Robot
Localization and Map Building: A Multisensor Fu-
sion Approach. Kluwer Academic Publishers, Nor-
well, MA, USA.
Lindeberg, T. (1998). Feature detection with automatic
scale selection. Int. J. Comput. Vision, 30(2):79–116.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. Interantional Journal of Com-
puter Vision, 60(2):91–110.
Matas, J., Chum, O., Urban, M., and Pajdla, T. (2002). Ro-
bust wide baseline stereo from maximally stable ex-
tremal regions. In Proceedings of the British Machine
Vision Conference 2002, BMVC 2002, Cardiff, UK,
2-5 September 2002. British Machine Vision Associ-
ation.
Mikolajczyk, K. and Schmid, C. (2005). A perfor-
mance evaluation of local descriptors. IEEE Trans-
actions on Pattern Analysis & Machine Intelligence,
27(10):1615–1630.
Mikolajczyk, K., Tuytelaars, T., Schmid, C., Zisserman, A.,
Matas, J., Schaffalitzky, F., Kadir, T., and Gool, L. V.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
296

(2005). A comparison of affine region detectors. Inter-
national Journal of Computer Vision, 65(1/2):43–72.
Ramisa, A., Aldavert, D., and Toledo, R. (2006). A
panorama based localization system. In 1st CVC Re-
search and Development Workshop, 2006, pages 36–
41. Computer Vision Center.
Se, S., Lowe, D., and Little, J. (2001). Vision-based
mobile robot localization and mapping using scale-
invariant features. In Proceedings of the IEEE In-
ternational Conference on Robotics and Automation
(ICRA), pages 2051–2058, Seoul, Korea.
Tapus, A. and Siegwart, R. (2006). A cognitive modeling
of space using fingerprints of places for mobile robot
navigation. In Proceedings the IEEE International
Conference on Robotics and Automation (ICRA), Or-
lando, U.S.A., May 2006.
Thrun, S. (2002). Robotic mapping: A survey. In Lake-
meyer, G. and Nebel, B., editors, Exploring Artifi-
cial Intelligence in the New Millenium. Morgan Kauf-
mann.
Tomatis, N., Nourbakhsh, I., and Siegwart, R. (2002).
Hybrid simultaneous localization and map building:
Closing the loop with multi-hypotheses tracking. In
Proceedings of the IEEE International Conference on
Robotics and Automation (ICRA), Washington DC,
USA, May 2002.
COMPARING COMBINATIONS OF FEATURE REGIONS FOR PANORAMIC VSLAM
297
