
AN INTELLIGENT MARSHALING PLAN BASED ON
MULTI-POSITIONAL DESIRED LAYOUT IN CONTAINER YARD
TERMINALS
Yoichi Hirashima
Dept. Media Science, Fac. Information Science and Technology, Osaka Institute of Technology
1-79-1 Kitayama, Hirakata-City, Osaka, 573-0196 Japan
Keywords:
Container marshaling, Block stacking problem, Q-learning, Reinforcement learning, Binary tree.
Abstract:
This paper proposes a new scheduling method for a marshaling in the container yard terminal. The proposed
method is derived based on Q-Learning algorithm considering the desired position of containers that are to
be loaded into a ship. In the method, 3 processes can be optimized simultaneously: rearrangement order of
containers, layout of containers assuring explicit transfer of container to the desired position, and removal plan
for preparing the rearrange operation. Moreover, the proposed method generates several desired positions for
each container, so that the learning performance of the method can be improved as compared to the conven-
tional methods. In general, at container yard terminals, containers are stacked in the arrival order. Containers
have to be loaded into the ship in a certain order, since each container has its own shipping destination and it
cannot be rearranged after loading. Therefore, containers have to be rearranged from the initial arrangement
into the desired arrangement before shipping. In the problem, the number of container-arrangements increases
by the exponential rate with increase of total count of containers, and the rearrangement process occupies large
part of total run time of material handling operation at the terminal. For this problem, conventional methods
require enormous time and cost to derive an admissible result. In order to show effectiveness of the proposed
method, computer simulations for several examples are conducted.
1 INTRODUCTION
In recent years, the number of shipping con-
tainers grows rapidly, and operations for layout-
rearrangement of container stacks occupy a large part
of the total run time of shipping at container termi-
nals. Since containers are moved by a transfer crane
driven by human operator, and thus, the container
operation is important to reduce cost, run time, and
environmental burden of material handling systems
(Siberholz et al., 1991). Commonly, materials are
packed into containers and each container has its own
shipping destination. Containers have to be loaded
into a ship in a certain desired order because they can-
not be rearranged in the ship. Thus, containers must
be rearranged before loading if the initial layout is dif-
ferent from the desired layout. Containers carried in
the terminal are stacked randomly in a certain area
called bay and a set of bays are called yard. When the
number of containers for shipping is large, the rear-
rangement operation is complex and takes long time
to achieve the desired layout of containers. Therefore
the rearrangement process occupies a large part of the
total run time of shipping. The rearrangement process
conducted within a bay is called marshaling.
In the problem, the number of stacks in each bay
is predetermined and the maximum number of con-
tainers in a stack is limited. Containers are moved by
a transfer crane and the destination stack for the con-
tainer in a bay is selected from the stacks being in the
same bay. In this case, a long series of movements of
containers is often required to achieve a desired lay-
out, and results (the number of container-movements)
that are derived from similar layouts can be quite dif-
ferent. Problems of this type have been solved by us-
ing techniques of optimization, such as genetic algo-
rithm (GA) and multi agent method (Koza, 1992; Mi-
nagawa and Kakazu, 1997). These methods can suc-
cessfuly yield some solutions for block stacking prob-
lems. However, they adopt the environmental model
different from the marshaling process, and do not as-
sure to obtain the desired layout of containers.
The Q-learning (Watkins and Dayan, 1992) is
known to be effective for learning under unknown
environment. In the Q-learning for generating mar-
shaling plan, all the estimates of evaluation-values for
pairs of the layout and movement of containers are
calculated. These values are called “Q-value” and Q-
234
Hirashima Y. (2007).
AN INTELLIGENT MARSHALING PLAN BASED ON MULTI-POSITIONAL DESIRED LAYOUT IN CONTAINER YARD TERMINALS.
In Proceedings of the Fourth Inter national Conference on Informatics in Control, Automation and Robotics, pages 234-239
DOI: 10.5220/0001643902340239
Copyright
c
SciTePress

table is a look-up table that stores Q-values. The input
of the Q-table is the plant state and the output is a Q-
value corresponding to the input. A movement is se-
lected with a certain probability that is calculated by
using the magnitude of Q-values. Then, the Q-value
corresponding to the selected movement is updated
based on the result of the movement. The optimal
pattern of container movements can be obtained by
selecting the movement that has the largest Q-value
at each state-movement pair, when Q-values reflect
the number of container movements to achieve the
desired layout. However, conventional Q-table has
to store evaluation-values for all the state-movement
pairs. Therefore, the conventional reinforcement
learning method, Q-learning, has great difficulties for
solving the marshaling problem, due to its huge num-
ber of learning iterations and states required to obtain
admissible operation of containers (Baum, 1999). Re-
cently, a Q-learning method that can generate mar-
shaling plan has been proposed (Hirashima et al.,
1999). Although these methods were effective several
cases, the desired layout was not achievable for every
trial so that the early-phase performances of learning
process can be degraded.
In this paper, a new reinforcement learning system
to generate a marshaling plan is proposed. The learn-
ing process in the proposed method is consisted of
two stages:
1
determination of rearrangement order,
2
selection of destination for removal containers.
Learning algorithms in these stages are independent
to each other and Q-values in one stage are referred
from the other stage. That is, Q-values are discounted
according to the number of container movement and
Q-table for rearrangement is constructed by using Q-
values for movements of container, so that Q-values
reflect the total number of container movements re-
quired to obtain a desired layout. Moreover, in the
end of stage
1
, selected container is rearranged into
the desired position so that every trial can achieve the
desired layout. In addition, in the proposed method,
each container has several desired positions in the fi-
nal layout, and the feature is considered in the learn-
ing algorithm. Thus, the early-phase performances of
the learning process can be improved. Finally, effec-
tiveness of the proposed method is shown by com-
puter simulations for several cases.
2 PROBLEM DESCRIPTION
Fig.1 shows an example of container yard terminal.
The terminal consists of containers, yard areas, yard
transfer cranes, auto-guided vehicles, and port crane.
Containers are carried by trucks and each container is
Container terminal
Port crane
Yard transfer crane
Ship
Container
Yard area
Figure 1: Container terminal.
stacked in a corresponding area called bay and a set of
bays constitutes a yard area. Each bay has n
y
stacks
that m
y
containers can be laden, the number of con-
tainers in a bay is k, and the number of bays depends
on the number of containers. Each container is recog-
nized by an unique name c
i
(i = 1, ··· , k). A position
of each container is discriminated by using discrete
position numbers, 1, ··· , n
y
· m
y
. Then, the position
of the container c
i
is described by x
i
(1 ≤ i ≤ k, 1 ≤
x
i
≤ m
y
· n
y
), and the state of a bay is determined by
the vector, x = [x
1
, · ·· , x
k
].
2.1 Grouping
The desired layout in a bay is generated based on the
loading order of containers that are moved from the
bay to a ship. In this case, the container to be loaded
into the ship can be anywhere in the bay if it is on top
of a stack. This feature yields several desired layouts
for the bay. In the addressed problem, when contain-
ers on different stacks are placed at the same height in
the bay, it is assumed that the positions of such con-
tainers can be exchanged. Fig.2 shows an example
of desired layouts, where m
y
= n
y
= 3, k = 9. In the
figure, containers are loaded in the ship in the descen-
dent order. Then, containers c
7
, c
8
, c
9
are in the same
group (Group1), and their positions are exchanged be-
cause the loading order can be kept unchanged after
the exchange of positions. In the same way, c
4
, c
5
, c
6
are in the Group2, and c
1
, c
2
, c
3
are in the Group3
where positions of containers can be exchanged. Con-
sequently several candidates for desired layout of the
bay are generated from the original desired-layout.
In addition to the grouping explained above, a
“heap shaped group” for n
y
containers at the top of
stacks in original the desired-layout (group 1) is gen-
erated as follows:
1. n
y
containers in group 1 can be placed at any
AN INTELLIGENT MARSHALING PLAN BASED ON MULTI-POSITIONAL DESIRED LAYOUT IN CONTAINER
YARD TERMINALS
235

A desired layout (original)
Bay
stack1
stack2
stack3
n
y
= 3
m
y
= 3
Layout candidates for bay
···
···
Grouping
Group1
Group2
Group3
c
7
c
7
c
7
c
7
c
7
c
7
c
8
c
8
c
8
c
8
c
8
c
8
c
9
c
9
c
9
c
9
c
9
c
9
c
4
c
4
c
4
c
4
c
4
c
4
c
5
c
5
c
5
c
5
c
5
c
5
c
6
c
6
c
6
c
6
c
6
c
6
c
1
c
1
c
1
c
1
c
1
c
1
c
2
c
2
c
2
c
2
c
2
c
2
c
3
c
3
c
3
c
3
c
3
c
3
Figure 2: Layouts for bay.
stacks if their height is same as the original one.
2. Each of them can be stacked on other n
y
− 1 con-
tainers when both of followings are satisfied:
(a) They are placed at the top of each stack in the
original disired-layout,
(b) The container to be stacked is loaded into the
ship before other containers being under the
container.
Other groups are the same as ones in the original
grouping, so that the grouping with heap contains all
the desired layout in the original grouping.
2.2 Marshaling Process
The marshaling process consists of 2 stages:
1
se-
lection of a container to be rearranged, and
2
re-
moval of the containers on the selected container in
1
. After these stages, rearrangement of the selected
container is conducted. In the stage
2
, the removed
container is placed on the destination stack selected
from stacks being in the same bay. When a container
is rearranged, n
y
positions that are at the same height
in a bay can be candidates for the destination. In ad-
dition, n
y
containers can be placed for each candi-
date of the destination. Then, defining t as the time
step, c
a
(t) denotes the container to be rearranged at
t in the stage
1
. c
a
(t) is selected from candidates
c
y
i
1
(i
1
= 1, · ·· , n
2
y
) that are at the same height in a
desired layout. A candidate of destination exists at a
bottom position that has undesired container in each
corresponding stack. The maximum number of such
stacks is n
y
, and they can have n
y
containers as can-
didates, since the proposed method considers groups
in the desired position. The number of candidates of
c
a
(t) is thus n
y
× n
y
. In the stage
2
, the container to
be removed at t is c
b
(t) and is selected from two con-
tainers c
y
i
2
(i
2
= 1, 2) on the top of stacks. c
y
1
is on the
c
a
(t) and c
y
2
is on the destination of c
a
(t). Then, in the
stage
2
, c
b
(t) is removed to one of the other stacks in
the same bay, and the destination stack u(t) at time t
is selected from the candidates u
j
( j = 1, ·· · , n
y
− 2).
c
a
(t) is rearranged to its desired position after all the
c
y
i
2
s are removed. Thus, a state transition of the bay
is described as follows:
x
t+1
=
f(x
t
, c
a
(t)) (stage
1
)
f(x
t
, c
b
(t), u(t)) (stage
2
)
(1)
where f(·) denotes that removal is processed and x
t+1
is the state determined only by c
a
(t), c
b
(t) and u(t) at
the previous state x
t
. Therefore, the marshaling plan
can be treated as the Markov Decision Process.
Additional assumptions are listed below:
1. The bay is 2-dimensional.
2. Each container has the same size.
3. The goal position of the target container must be
located where all containers under the target con-
tainer are placed at their own goal positions.
4. k ≤ m
y
n
y
− 2m
y
+ 1
The maximum number of containers that must re-
moved before rearrangement of c
a
(t) is 2m
y
− 1 be-
cause the height of each stack is limited to m
y
. Thus,
assumption (4) assures the existence of space for re-
moving all the c
b
(t), and c
a
(t) can be placed at the
desired position from any state x
t
.
Initial layout of bay
case (a) case (b) case (c)
Marshaling
Step 1Step 1Step 1
Step 2Step 2Step 2
Step 3Step 3Step 3
Step 4Step 4Step 4
Step 5Step 5Step 5
desired layout for bay
positions in a bay
c
1
c
1
c
1
c
1
c
1
c
1
c
1
c
1
c
1
c
1
c
1
c
1
c
1
c
1
c
1
c
1
c
1
c
2
c
2
c
2
c
2
c
2
c
2
c
2
c
2
c
2
c
2
c
2
c
2
c
2
c
2
c
2
c
2
c
2
c
3
c
3
c
3
c
3
c
3
c
3
c
3
c
3
c
3
c
3
c
3
c
3
c
3
c
3
c
3
c
3
c
3
c
4
c
4
c
4
c
4
c
4
c
4
c
4
c
4
c
4
c
4
c
4
c
4
c
4
c
4
c
4
c
4
c
4
c
5
c
5
c
5
c
5
c
5
c
5
c
5
c
5
c
5
c
5
c
5
c
5
c
5
c
5
c
5
c
5
c
5
c
6
c
6
c
6
c
6
c
6
c
6
c
6
c
6
c
6
c
6
c
6
c
6
c
6
c
6
c
6
c
6
c
6
c
7
c
7
c
7
c
7
c
7
c
7
c
7
c
7
c
7
c
7
c
7
c
7
c
7
c
7
c
7
c
7
c
7
c
8
c
8
c
8
c
8
c
8
c
8
c
8
c
8
c
8
c
8
c
8
c
8
c
8
c
8
c
8
c
8
c
8
1
2
3
4
5
6
7
8
9
10
1112
13
14
15
Figure 3: Marshaling process.
Figure 3 shows 3 examples of marshaling process,
where m
y
= 3, n
y
= 5, k = 8. Positions of containers
are discriminated by integers 1, · ·· , 15. The first con-
tainer to be loaded is c
8
and containers must be loaded
by descendent order until c
1
is loaded. In the figure,
a container marked with a 2 denotes c
1
, a container
marked with a is removed one, and an arrowed
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
236

line links source and destination positions of removed
container. Cases (a),(b) have the same order of re-
arrangement, c
2
, c
7
, c
6
, and the removal destinations
are different. Whereas, case (c) has the different or-
der of rearrangement, c
8
, c
2
, c
7
. When no groups are
considered in desired arrangement, case (b) requires
5 steps to complete the marshaling process, and other
cases require one more step. Thus, the total number
of movements of container can be changed by the des-
tination of the container to be removed as well as the
rearrangement order of containers.
If groups are considered in desired arrangement,
case (b) achieves a goal layout at step2, case (a)
achieves at step3, case (c) achives at step4. If ex-
tended groups are considered, cases (a),(b) achive
goal layouts at step2 and case (c) achives at step4.
Since extended goal layouts include the non-extended
goal layouts, and since non-extended goal layouts in-
clude a non-grouping goal layout, equivalent or bet-
ter marshaling plan can be generated by using the ex-
tended goal notion as compared to plans generated by
other goal notions.
The objective of the problem is to find the best
series of movements which transfers every container
from an initial position to the goal position. The goal
state is generated from the shipping order that is pre-
determined according to destinations of containers. A
series of movements that leads a initial state into the
goal state is defined as an episode. The best episode is
the series of movements having the smallest number
of movements of containers to achieve the goal state.
3 REINFORCEMENT LEARNING
FOR MARSHALING PLAN
3.1 Update Rule of Q-values
In the selection of c
a
, the container to be rear-
ranged, an evaluation value is used for each candidate
c
y
i
1
(i
1
= 1, · ·· , n
2
y
). In the same way, evaluation val-
ues are used in the selection of the container to be
removed c
b
and its destination u
j
( j = 1, ··· , n
y
− 2).
Candidates of c
b
is c
y
i
2
(i
2
= 1, · ·· , n
y
). The evalua-
tion value for the selection of c
y
i
1
, c
y
i
2
and u
j
at the
state x are called Q-values, and a set of Q-values is
called Q-table. At the lth episode, the Q-value for
selecting c
y
i
1
is defined as Q
1
(l, x, c
y
i
1
), the Q-value
for selecting c
y
i
2
is defined as Q
2
(l, x, c
y
i
1
, c
y
i
2
) and
the Q-value for selecting u
j
is defined as Q
3
(l, x, c
y
i
1
,
c
y
i
2
, u
j
). The initial value for both Q
1
, Q
2
, Q
3
is as-
sumed to be 0.
In this method, a large amount of memory space
is required to store all the Q-values referred in every
episode. In order to reduce the required memory size,
the length of episode that corresponding Q-values are
stored should be limited, since long episode often in-
cludes ineffective movements of container. In the fol-
lowing, update rule of Q
3
is described. When a series
of n movements of container achieves the goal state x
n
from an initial state x
0
, all the referred Q-values from
x
0
to x
n
are updated. Then, defining L as the total
counts of container-movements for the corresponding
episode, L
min
as the smallest value of L found in the
past episodes, and s as the parameter determining the
threshold, Q
3
is updated when L < L
min
+ s(s > 0) is
satisfied by the following equation:
Q
3
(l, x
t
, c
a
(t), c
b
(t), u(t)) =
(1− α)Q
3
(l − 1, x
t
, c
a
(t), c
b
(t), u(t))
+α[R+V
t+1
]
V
t
=
γmax
y
i
1
Q
1
(l, x
t
, c
y
i
1
) (stage
1
)
γmax
y
i
2
Q
2
(l, x
t
, c
a
(t), c
y
i
2
) (stage
2
)
(2)
where γ denotes the discount factor and α is the learn-
ing rate. Reward R is given only when the desired
layout has been achieved. L
min
is assumed to be infin-
ity at the initial state, and updated when L < L
min
by
the following equation: L = L
min
.
In the selection of c
b
(t), the evaluation value
Q
3
(l, x, c
a
(t), c
b
(t), u
j
) can be referred for all the
u
j
( j = 1·· ·n
y
− 2), and the state x does not change.
Thus, the maximum value of Q
3
(l, x, c
a
(t), c
b
(t), u
j
)
is copied to Q
1
(l, x, c(t)), that is,
Q
2
(l, x, c
a
(t), c
b
(t)) =
max
j
Q
3
(l, x, c
a
(t), c
b
(t), u
j
).
(3)
In the selection of c
a
(t), the evaluation value
Q
1
(l, x, c
a
(t)) is updated by the following equations:
Q
1
(l, x
t
, c
a
(t)) =
max
y
i
1
Q
1
(l, x
t
, c
y
i
1
) + R (stage
1
)
max
y
i
2
Q
2
(l, x
t
, c
a
(t), c
y
i
2
) (stage
2
)
(4)
In order to select actions, the ”ε-greedy” method
is used. In the ”ε-greedy” method, c
a
(t), c
b
(t) and a
movement that have the largest Q
1
(l, x, c
a
(t)), Q
2
(l,
x, c
a
(t), c
b
(t)) and Q
3
(l, x, c
a
(t), c
b
(t), u
j
) are selected
with probability 1−ε(0 < ε < 1), and with probability
ε, a container and a movement are selected randomly.
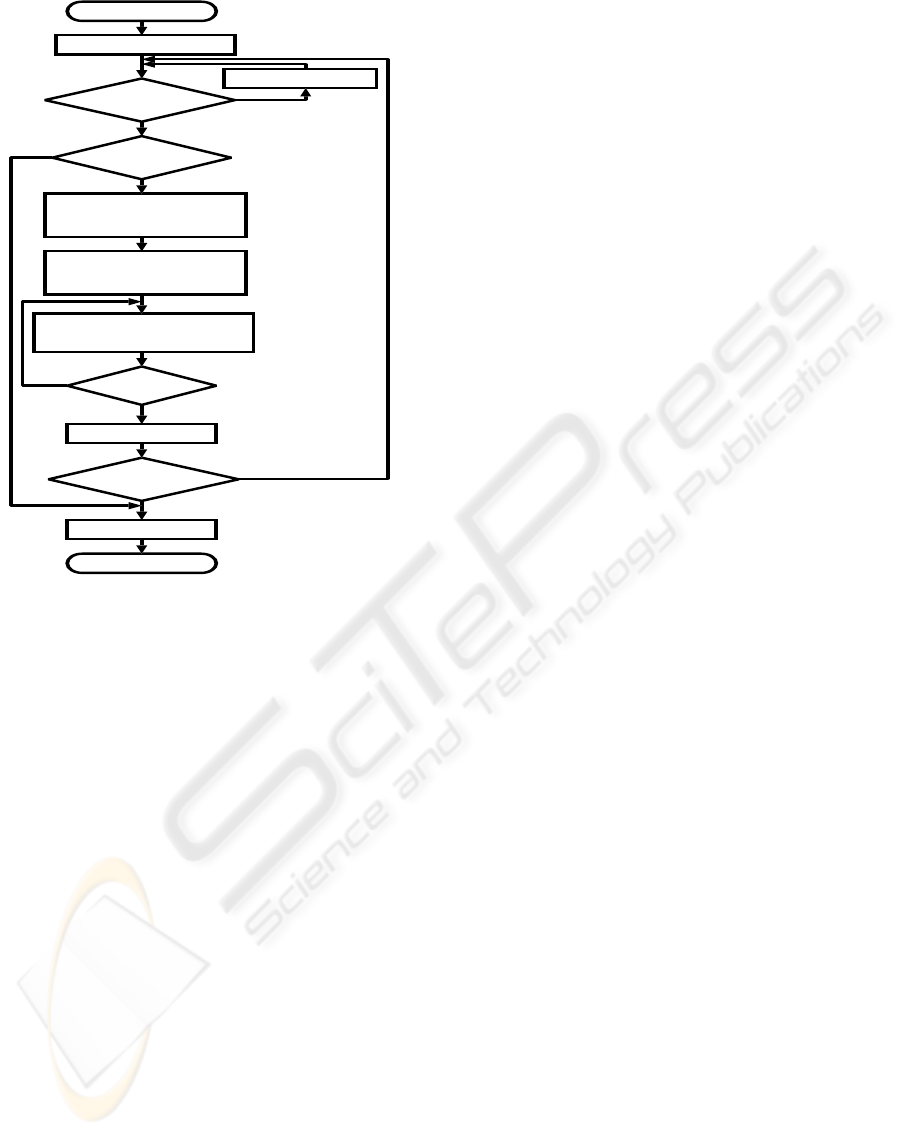
3.2 Learning Algorithm
By using the update rule, restricted movements and
goal states explained above, the learning process is
described as follows:
[1]. Count the number of containers being in the
goal positions and store it as n
AN INTELLIGENT MARSHALING PLAN BASED ON MULTI-POSITIONAL DESIRED LAYOUT IN CONTAINER
YARD TERMINALS
237
START
Initialize Q-values
Rearrange c
a
(t)
Rearrange c
a
(t)
Exist free c
a
(t)?
Select c
a
(t)
Select c
b
(t)
Save (x, c
a
(t), u
j
)
Save (x, c
a
(t), u
j
)
(Update Q
3
by eq.(3))
(Update Q
1
by eq.(4))
Exist c
b
(t)?
Move c
b
(t)
(Update Q
2
by eq.(2))
Save (x, c
a
(t), c
b
(t), u
j
)
Receive reward
Desired layout?
Desired layout?
END
yes
yes
yes
yes
no
no
no
no
Figure 4: Flowchart of the learning algorithm.
[2]. If n = k, go to [10]
[3]. Select c
a
(t) to be rearranged
[4]. Store (x, c
a
(t))
[5]. Select c
b
(t) to be removed
[6]. Store (x, c
a
(t), c
b
(t))
[7]. Select destination position u
j
for c
b
(t)
[8]. Store (x, c
a
(t), c
b
(t), u
j
)
[9]. Remove c
b
(t) and go to [5] if another c
b
(t) ex-
ists, otherwise go to [1]
[10]. Update all the Q-values referred from the initial
state to the goal state according to eqs. (2), (3)
A flow chart of the learning algorithm is depicted
in Figure 4.
4 SIMULATIONS
Computer simulations are conducted for 2 cases, and
learning performances are compared for following
two methods:
(A) proposed method considering grouping with
heap,
(B) proposed method considering original grouping,
(C) a learning method using eqs. (2)-(4) as the
update rule without grouping (Hirashima et al.,
2005),
(D) method (E) considering original grouping.
(E) a learning method using, eqs. (2),(3) as the up-
date rule, which has no selection of the desired
position of c
a
(t) (Motoyama et al., 2001).
In methods (D),(E), although the stage
2
has the
same process as in the method (A), the container to be
rearranged, c
a
(t), is simply selected from containers
being on top of stacks. The learning process used in
methods (D),(E) is as follows:
[1]. The number of containers being on the desired
positions is defined as k
B
and count k
B
[2]. If k
B
= k, go to [6] else go to [3],
[3]. Select c
a
(t) by using ε-greedy method,
[4]. Select a destination of c
a
(t) from the top of
stacks by using ε-greedy method,
[5]. Store the state and go to [1],
[6]. Update all the Q-values referred in the episode
by eqs. (2),(3).
Since methods (D),(E) do not search explicitly the
desired position for each container, each episode is
not assured to achieve the desired layout in the early-
phase of learning.
In methods (A)-(E), parameters in the yard are set
as k = 18, m
y
= n
y
= 6 that are typical values of mar-
shaling environment in real container terminals. Con-
tainers are assumed to be loaded in a ship in descen-
dant order from c
18
to c
1
. Figure 5 shows a desired
layout for the two cases, and figure 6 shows corre-
sponding initial layout for each case. Other parame-
ters are put as α = 0.8, γ = 0.8, R = 1.0, ε = 0.8, s =
15.
The container-movement counts of the best solu-
tion and its averaged value for each method are de-
scribed in Table1. Averaged values are calculated
over 20 independent simulations. Among the meth-
ods, method (A) derives the best solution with the
smallest container-movements. Therefore method (A)
can improve the solution for marshaling as well as
learning performance to solve the problem.
Results for case 2 are shown in Fig. 7. In the fig-
ure, horizontal axis shows the number of trials, and
vertical axis shows the minimum number of move-
ments of containers found in the past trials. Each
result is averaged over 20 independent simulations.
In both cases, solutions that is obtained by meth-
ods (A),(B) and (C) is much better as compared to
methods (D),(E) in the early-phase of learning, be-
cause methods (A),(B),(C) can achieve the desired
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
238
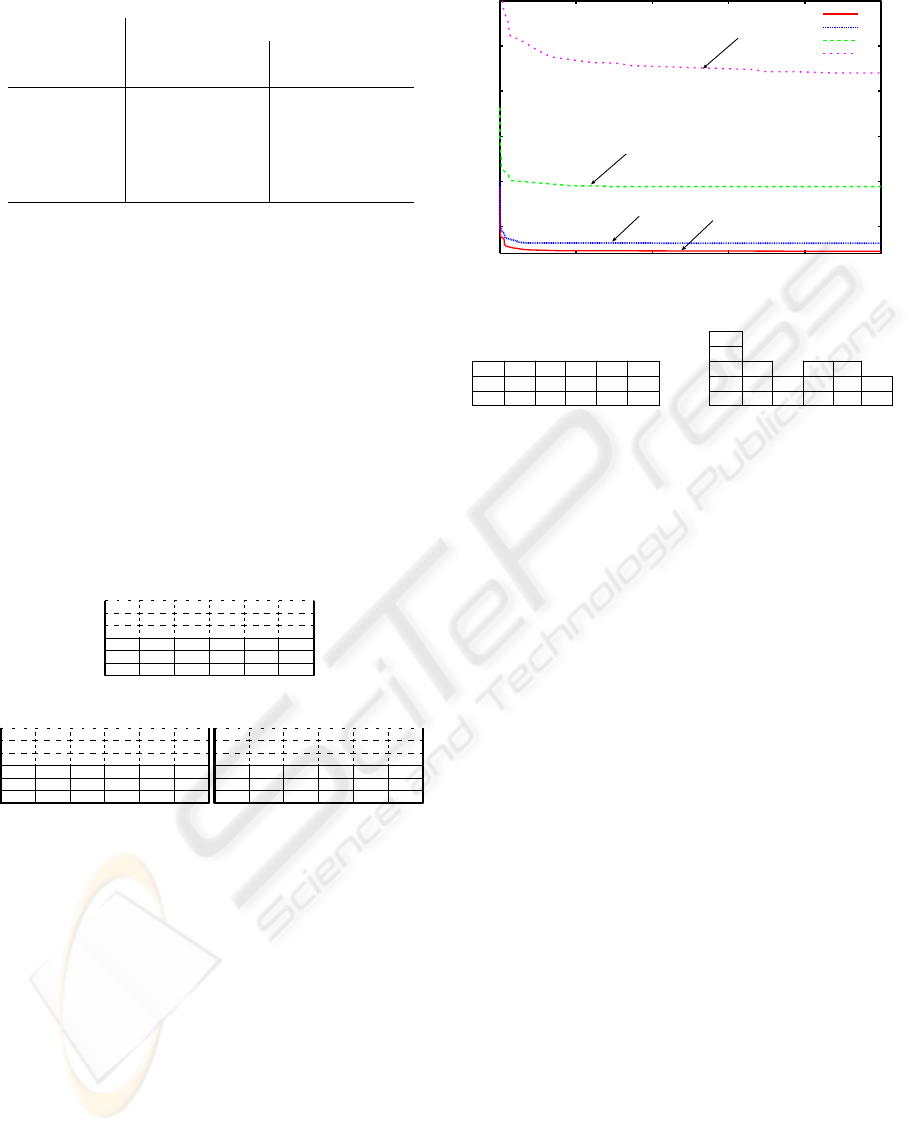
Table 1: The best solution of each method for cases 1, 2.
Case 1 Case 2
min. ave. min. ave.
counts value counts value
(A) 18 19.10 23 24.40
(B)
20 20.40 25 26.20
Method (C)
34 35.05 35 38.85
(D)
38 46.90 50 64.00
(E)
148 206.4 203 254.0
layout in every trial, whereas methods (D),(E) can-
not. Also, methods (A),(B) successfully reduces the
number of trials in order to achieve the specific count
of container-movements as compared to method (C),
since methods (A),(B) considers grouping and finds
desirable layouts than can easily diminish the number
of movements of container in the early-phase learn-
ing. Moreover, at 10000th trail the number of move-
ments of containers in method (A) is smaller as com-
pared to that in method (B) because, among the ex-
tended layouts, method (A) obtained better desired
layouts for improving the marshaling process as com-
pared to the layout generated by method (B). Desired
layouts generated by methods (A),(B) are depicted in
the Fig.8 for case 2.
c
1
c
2
c
3
c
4
c
5
c
6
c
7
c
8
c
9
c
10
c
11
c
12
c
13
c
14
c
15
c
16
c
17
c
18
Figure 5: A desired layout for cases 1,2.
c
1
c
1
c
2
c
2
c
3
c
3
c
4
c
4
c
5
c
5
c
6
c
6
c
7
c
7
c
8
c
8
c
9
c
9
c
10
c
10
c
11
c
11
c
12
c
12
c
13
c
13
c
14
c
14
c
15
c
15
c
16
c
16
c
17
c
17
c
18
c
18
Case 1 Case 2
Figure 6: Initial layouts for cases 1,2.
5 CONCLUSIONS
A new reinforcement learning system for marshaling
plan at container terminals has been proposed. Each
container has several desired positions that are in the
same group, and the learning algorithm is designed to
considering the feature.
In simulations, the proposed method could find
solutions that had smaller number of movements
of containers as compared to conventional methods.
Moreover, since the proposed method achieves the de-
sired layout in each trial as well as learns the desir-
able layout, the method can generate solutions with
the smaller number of trials as compared to the con-
ventional method.
0 2000 4000
40
6000
60
8000 10000
80
30
50
70
Minimum step counts found in the past trials
Trials
(A)
(A)
(B)
(B)
(C)
(C)
(D)
(D)
Figure 7: Performance comparison for case 2.
C
1
C
1
C
2
C
2
C
3
C
3
C
4
C
4
C
5
C
5
C
6
C
6
C
7
C
7
C
8
C
8
C
9
C
9
C
10
C
10
C
11
C
11
C
12
C
12
C
13
C
13
C
14
C
14
C
15
C
15
C
16
C
16
C
17
C
17
C
18
C
18
Goal obtained by (B) Goal obtained by (A)
Figure 8: Final layouts of the best solutions for case 2.
REFERENCES
Baum, E. B. (1999). Toward a model of intelligence as an
economy of agents. Machine Learning, 35:155–185.
Hirashima, Y., Iiguni, Y., Inoue, A., and Masuda, S. (1999).
Q-learning algorithm using an adaptive-sized q-table.
Proc. IEEE Conf. Decision and Control, pages 1599–
1604.
Hirashima, Y., takeda, K., Furuya, O., Inoue, A., and Deng,
M. (2005). A new method for marshaling plan using a
reinforcement learning considering desired layout of
containers in terminals. Preprint of 16th IFAC World
Congress, pages We–E16–TO/2.
Koza, J. R. (1992). Genetic Programming : On Program-
ming Computers by means of Natural Selection and
Genetics. MIT Press.
Minagawa, M. and Kakazu, Y. (1997). An approach to
the block stacking problem by multi agent coopera-
tion. Trans. Jpn. Soc. Mech. Eng. (in Japanese), C-
63(608):231–240.
Motoyama, S., Hirashima, Y., Takeda, K., and Inoue, A.
(2001). A marshalling plan for container terminals
based on reinforce-ment learning. Proc. of Inter.
Sympo. on Advanced Control of Industrial Processes,
pages 631–636.
Siberholz, M. B., Golden, B. L., and Baker, K. (1991). Us-
ing simulation to study the impact of work rules on
productivity at marine container terminals. Comput-
ers Oper. Res., 18(5):433–452.
Watkins, C. J. C. H. and Dayan, P. (1992). Q-learning. Ma-
chine Learning, 8:279–292.
AN INTELLIGENT MARSHALING PLAN BASED ON MULTI-POSITIONAL DESIRED LAYOUT IN CONTAINER
YARD TERMINALS
239
