
MOTION CONTROL OF AN OMNIDIRECTIONAL MOBILE ROBOT
Xiang Li and Andreas Zell
Wilhelm-Schickard-Institute, Departmant of Computer Architecture, University of T
¨
ubingen
Sand 1, 72076 T
¨
ubingen, Germany
Keywords:
Mobile robots and autonomous systems, system identification, actuator saturation, path following control.
Abstract:
This paper focuses on the motion control problem of an omnidirectional mobile robot. A new control method
based on the inverse input-output linearized kinematic model is proposed. As the actuator saturation and
actuator dynamics have important impacts on the robot performance, this control law takes into account these
two aspects and guarantees the stability of the closed-loop control system. Real-world experiments with an
omnidirectional middle-size RoboCup robot verifies the performance of this proposed control algorithm.
1 INTRODUCTION
Recently, omnidirectional wheeled robots have re-
ceived more attention in the mobile robots applica-
tions, because the omnidirecitional robots “have full
mobility in the plane, which means that they can move
at each instant in any direction without any reorien-
tation ”(Campion et al., 1996). Unlike the nonholo-
nomic robots, such as car-like robots, having to rotate
before implementing any desired translation velocity,
omnidirecitonal robots have higher maneuverability
and are widely used in dynamic environment appli-
cations, for example, in the middle-size league of the
annual RoboCup competition.
Most motion control methods of mobile robots are
based on robots dynamic models (Watanabe, 1998;
Liu et al., 2003; Purwin and Andrea, 2006; Tsai et al.,
2006) or robots kinematic models (Muir and Neu-
man, 1990; Terashima et al., 2004; Rojas and F
¨
orster,
2006). A dynamic model directly describes the rela-
tionship between the forces exerted by the wheels and
the robot movement, with the applied voltage of each
wheel the input and the robot movement in terms of
linear and angular accelerations as output. But the dy-
namic variations caused by the changes in the robot’s
inertia moment and perturbations from the mechanic
components (Scolari Conceic¸
˜
ao et al., 2005) make the
controller design more complex. With the assump-
tion that no slippage of wheels occurs, sensors have
high accuracy and ground is planar enough, kinematic
models are widely used in designing robots behav-
iors because of the simpler structures. As the inputs
of kinematic models are robot wheels velocities, and
outputs are the robot linear and angular velocities,
the actuator dynamics of the robot are assumed fast
enough to be ignored, which means the desired wheel
velocities can be achieved immediately. However, the
actuator dynamics limit and even degrade the robot’s
performance in real situations.
Another important aspect of robot control in prac-
tice is actuator saturation. Because the commanding
motor speeds of the robot’s wheels are bounded by
the saturation limits, the actuator saturation can af-
fect the robot’s performance, even make robots mo-
tion become unstable (Indiveri et al., 2006; Scolari
Conceic¸
˜
ao et al., 2006).
This paper presents a motion control method for
an omnidirectional robot, based on the inverse input-
output linearization of the kinematic model. It takes
into account not only the identified actuator dynamics
but also the actuator saturation in designing a con-
troller, and guarantees the stability of the closed-loop
control system.
The remainder of this paper introduces the
kinematic model of an omnidirectional middle-size
Robocup robot in section 2; Path following and ori-
entation tracking problems are solved based on the
inverse input-output linearized kinematic model in
125
Li X. and Zell A. (2007).
MOTION CONTROL OF AN OMNIDIRECTIONAL MOBILE ROBOT.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 125-132
DOI: 10.5220/0001644801250132
Copyright
c
SciTePress
section 3, where the actuator saturation is also ana-
lyzed; section 4 presents the identification of actua-
tor dynamics and their influence on the control per-
formance; Finally the experiment results and conclu-
sions are discussed in sections 5 and 6, respectively.
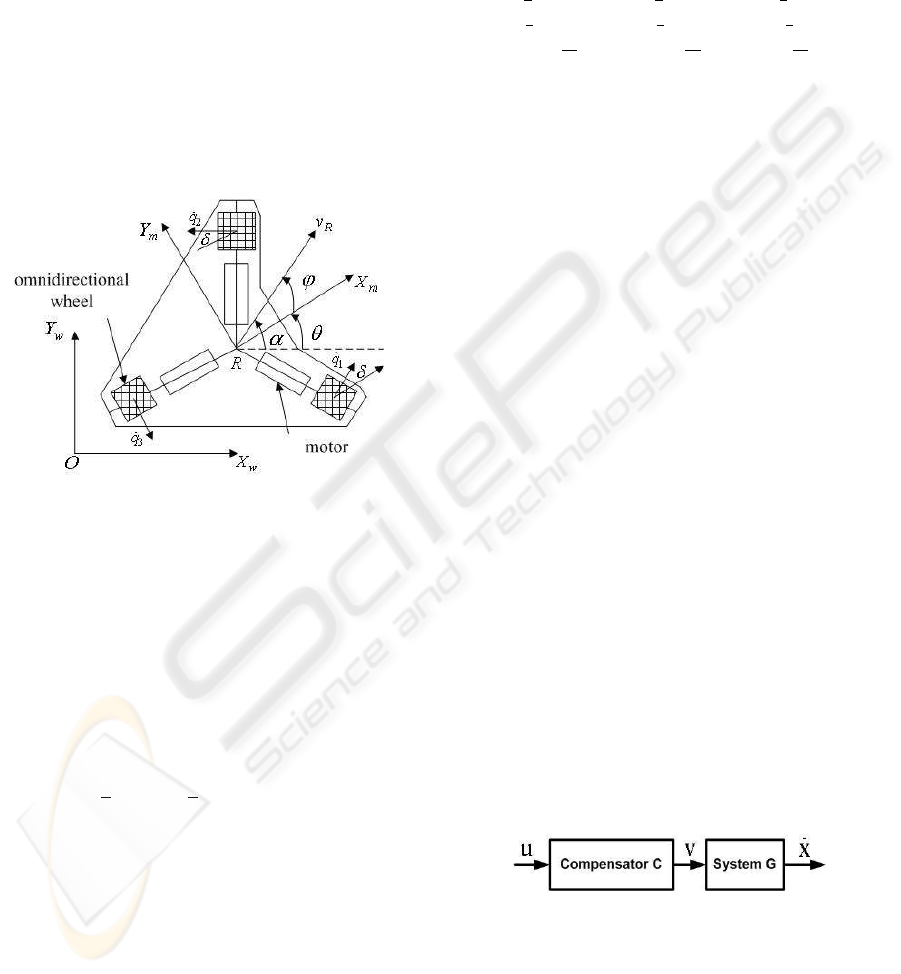
2 ROBOT KINEMATIC MODEL
The mobile robot used in our case is an omnidirec-
tional robot, whose base is shown in figure 1. It has
three Swedish wheels mounted symmetrically with
120 degrees from each other. Each wheel is driven
by a DC motor and has a same distance L from its
center to the robot’s center of mass R.
Figure 1: Kinematics diagram of the base of an omnidirec-
tional robot.
Besides the fixed world coordinate system
[X
w
,Y
w
], a mobile robot fixed frame [X
m
,Y
m
] is de-
fined, which is parallel to the floor and whose origin
locates at R. θ denotes the robot orientation, which is
the direction angle of the axis X
m
in the world coor-
dinate system. α and ϕ denote the direction of the
robot translation velocity v
R
observed in the world
and robot coordinate system, respectively. The kine-
matic model with respect to the robot coordinate sys-
tem is given by :
v =
√
3/3 −
√
3/3 0
1/3 1/3 −2/3
1/(3L) 1/(3L) 1/(3L)
˙
q, (1)
where v = [ ˙x
m
R
˙y
m
R
ω]
T
is the vector of robot veloc-
ities observed in the robot coordinate system; ˙x
m
R
and
˙y
m
R
are the robot translation velocities; ω is the robot
rotation velocity.
˙
q is the vector of wheel velocities
[ ˙q
1
˙q
2
˙q
3
]
T
, and ˙q
i
(i = 1,2,3) is the i-th wheel’s ve-
locity, which is equal to the wheel’s radius multiplied
by the wheel’s angular velocity.
Introducing the transformation matrix from the
robot coordinate system to the world coordinate sys-
tem as
w
R
m
=
cosθ −sinθ
sinθ cosθ
, (2)
the kinematic model with respect to the world co-
ordinate system is deduced as:
˙
x =
2
3
cos(θ+ δ) −
2
3
cos(θ−δ)
2
3
sinθ
2
3
sin(θ+ δ) −
2
3
sin(θ−δ) −
2
3
cosθ
1
3L
1
3L
1
3L
˙
q,
(3)
where
˙
x = [ ˙x
R
˙y
R
˙
θ]
T
is the robot’s velocity vector
with respect to the world coordinate system; ˙x
R
and ˙y
R
are the robot translation velocities;
˙
θ is the robot ro-
tation velocity; δ refers to the wheel orientation in the
robot coordinate system and is equal to 30 degrees.
It is important to notice that the transformation
matrix in model 1 is full rank, which denotes that
the translation and rotation of the robot are decou-
pled, and guarantees the separate control of these two
movements.
For the high level control laws without consider-
ing the wheel velocities, the kinematic model
˙
x = Gv (4)
is used in our control method, where the transforma-
tion matrix G is equal to [
w
R
m
0 ; 0 1]. Because G is
full rank, the characteristics of decoupled movement
is also kept.
3 INVERSE INPUT-OUTPUT
LINEARIZATION BASED
CONTROL
The trigonometric functions of angle θ in the transfor-
mation matrix G determine the nonlinearities of the
kinematic model 4. Since the matrix G is full rank,
this nonlinear model can be exactly linearized by in-
troducing a simple compensator C = G
−1
. The lin-
earized system becomes
˙
x = u with a new input vector
u = [u
1
u
2
u
3
]
T
.
Figure 2: Linearized system by the component C.
This linear system shown in figure 2 is completely
decoupled and allows the controlling of the robot’s
translation and rotation in a separate way. When a
controller K is designed based on this simple linear
system, the controller of the original system is gener-
ated as CK. The overall control loop, which consists
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
126
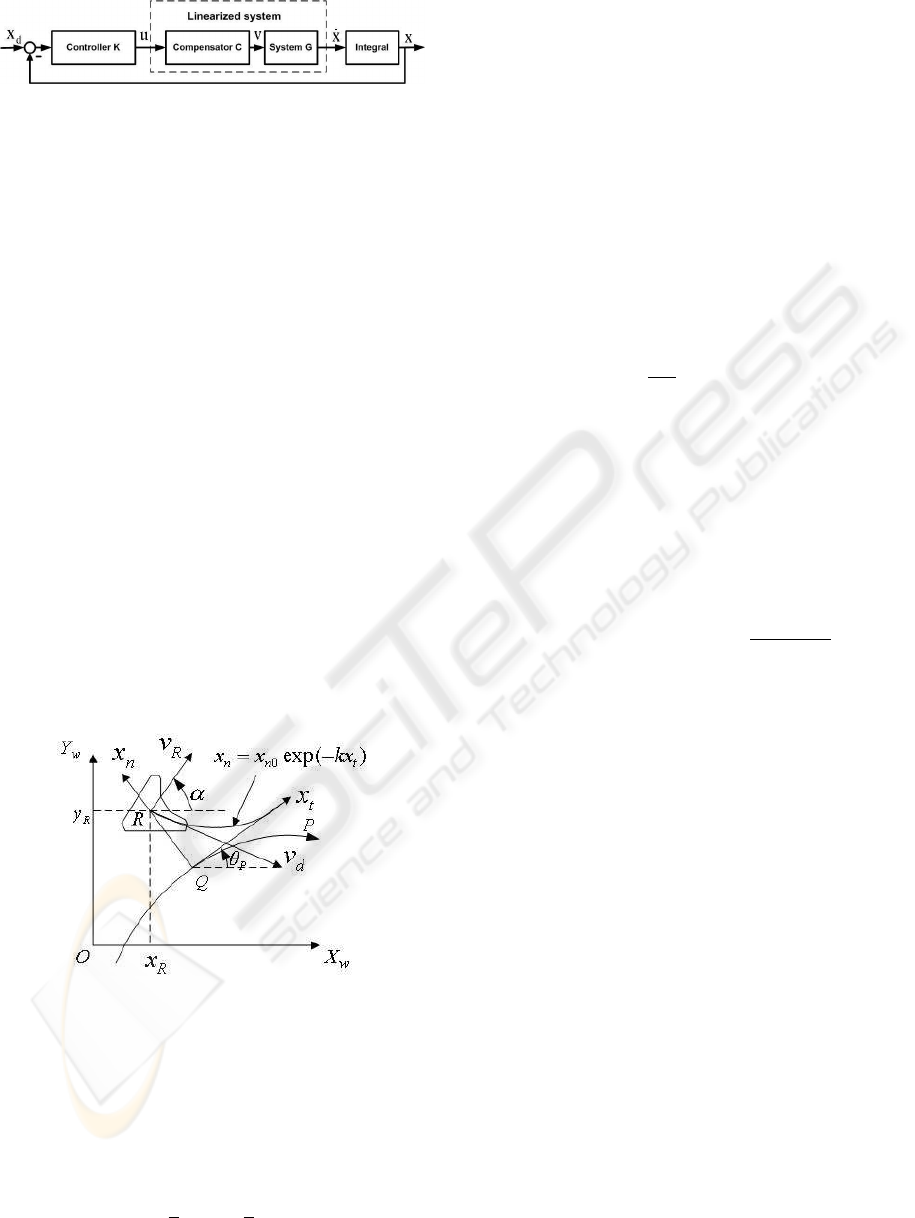
Figure 3: Closed-loop control system.
of the nonlinear system, the compensator and the con-
troller, is shown in figure 3,
where x denotes the robot state vector [x
R
y
R
θ]
T
and x
d
is the desired state vector; x
R
and y
R
are robot
position observed in the world coordinate system.
Based on this input-output linearized system, path
following and orientation tracking problems are ana-
lyzed with respect to the robot translation and rotation
control in the following subsections. The influence of
actuator saturation is also accounted to keep the de-
coupling between the translation and rotation move-
ments.
3.1 Path Following Control
As one high-level control problem, path following is
chosen in our case to deal with the robot translation
control. The path following problem is illustrated in
figure 4. P denotes the given path. Point Q is the
orthogonal project of R on the path P. The path coor-
dinate system x
t
Qx
n
moves along the path P and the
coordinate axes x
t
and x
n
direct the tangent and nor-
mal directions at point Q, respectively. θ
P
is the path
tangent direction at point Q.
Figure 4: Illustration of the path following problem.
Based on the above definitions, the path follow-
ing problem is to find proper control values of the
robot translation velocity v
R
and angular velocity
˙
α
such that the deviation distance x
n
and angular error
˜
θ
R
= α−θ
P
tend to zero.
To solve this problem, a Lyapunov candidate func-
tion
V =
1
2
K
d
x
2
n
+
1
2
K
θ
˜
θ
2
R
(5)
can be considered, where K
d
and K
θ
are positive con-
stants. The time derivation of V results in
˙
V = K
d
x
n
˙x
n
+ K
θ
˜
θ
R
˙
˜
θ
R
. (6)
Mojaev (Mojaev and Zell, 2004) presents a sim-
ple control law based on the deviation x
n
, where R
is controlled to move along an exponential curve and
to converge to the axis X
t
. The exponential curve is
expressed as
x
n
= x
n
0
exp(−kx
t
), (7)
where x
n
0
is the initial deviation and the positive con-
stant k determines the convergence speed of the devi-
ation. Differentiating (7) with respect to x
t
, we get the
tangent direction of the exponential curve as
˜
θ
R
= arctan(
dx
n
dx
t
) = arctan(−kx
n
). (8)
Therefore, for a non-zero constant desired velocity v
d
,
the translation velocity of robot in the coordinate sys-
tem x
t
Ox
n
results in
˙x
n
= v
d
sin
˜
θ
R
, (9)
˙x
t
= v
d
cos
˜
θ
R
. (10)
Substituting the time derivative of
˜
θ
R
into (6), we
get
˙
V = K
d
x
n
˙x
n
+ kK
θ
arctan(−kx
n
)
−˙x
n
1+ (kx
n
)
2
< 0,
(11)
because x
n
˙x
n
= x
n
v
d
sin(arctan(−kx
n
)) < 0 and
˙x
n
arctan(kx
n
) < 0. This solution of
˙
V guarantees the
global stability of the equilibrium at x
n
= 0,
˜
θ
R
= 0,
which means this control law solves the path follow-
ing problem.
Transforming the robot velocity into the world co-
ordinate system, we get the control values of the lin-
earized system as
u
1
= v
d
cosα, (12)
u
2
= v
d
sinα, (13)
where α =
˜
θ
R
+ θ
P
.
The input of controller 12 and 13 is the devia-
tion distance between point R and the given path,
which normally can be directly obtained by the sen-
sors on the robot. Moreover, the deviation converges
smoothly to zero with the speed controlled by param-
eter k, which can be chosen according to the perfor-
mance requirement.
3.2 Orientation Tracking
Unlike a car-like wheeled robot, the orientation of an
omnidirectional robot can be different from the di-
rection of the robot translation velocity by any angle
MOTION CONTROL OF AN OMNIDIRECTIONAL MOBILE ROBOT
127
ϕ. This relationship is denoted as α = θ + ϕ. That
means the robot orientation can track any angle when
the robot is following a given path. Based on the lin-
earized model, the orientation tracking task is to find
a suitable u
3
, which is equal to the robot rotation ve-
locity ω, such that
lim
t→∞
(θ
d
(t) −θ(t)) = 0, (14)
where θ
d
(t) is the desired orientation.
As the system between input variable u
3
and out-
put variable θ is an integrator, a commonly used PD
controller can be designed to fulfill the orientation
tracking task.
3.3 Actuator Saturation
Based on the inverse input-output linearization, the
translation and rotation of an omnidirectional robot
can be easily achieved in a separate way. This lin-
earization is with respect to the input-output relation-
ship, which requires the internal parts having suffi-
cient capability to achieve the desired inputs. How-
ever, the power of the robot’s motors is bounded and
the actuators will saturate when the commanding ve-
locities are too large. The presence of actuator satura-
tion can influence the decoupling between robot trans-
lation velocity and rotation velocity, such that the sys-
tem performance and stability is severely impacted.
Therefore, it is necessary to deal with the actuator sat-
uration in the controller design.
For our omnidirectional robot, the maximal veloc-
ity of each wheel is limited by ˙q
m
, namely
|
˙q
i
|
≤ ˙q
m
.
Substituting the above control values from equations
(12) (13) and u
3
into the inverse kinematic models (2)
and (1), the wheel velocities are computed as:
˙q
1
˙q
2
˙q
3
=
v
d
cos(α−θ−δ)+ Lu
3
−v
d
cos(α−θ+ δ)+ Lu
3
v
d
sin(θ−α) + Lu
3
, (15)
To achieve orientation tracking based on the above
path following control, the desired translation veloc-
ity’ magnitude V
d
is assumed to be less than ˙q
m
. Sub-
stituting ˙q
m
into (15), the lower and upper boundary
of each wheel’s velocity (L
b
i
and U
b
i
) can be calcu-
lated from the following three inequalities,
|
v
d
cos(α−θ−δ)+ Lu
3
|
< ˙q
m
|
−v
d
cos(α−θ+ δ)+ Lu
3
|
< ˙q
m
|
v
d
sin(θ−α) + Lu
3
|
< ˙q
m
,
(16)
Then the dynamic boundary values of u
3
are com-
puted as
l
b
= max(l
b
1
,l
b
2
,l
b
3
)
u
b
= min(u
b
1
,u
b
2
,u
b
3
),
(17)
where l
b
and u
b
are the low and up boundary.
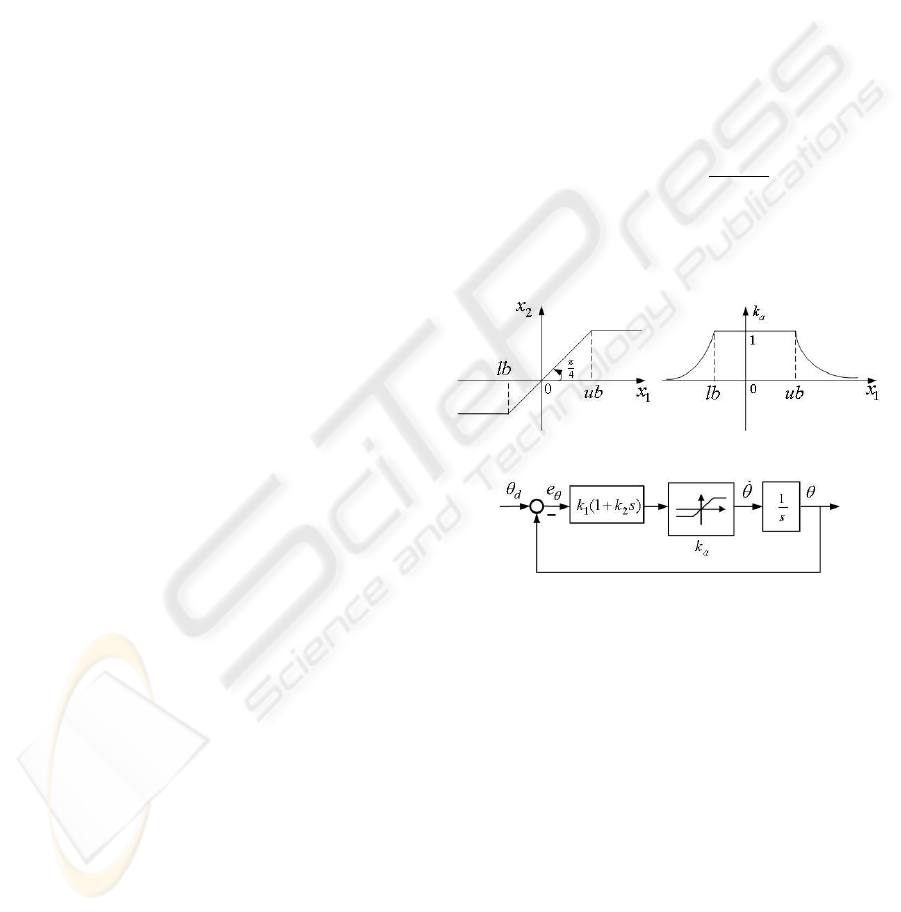
Considering the saturation function
x
2
=
u
b
, if x
1
> u
b
x
1
, if l
b
≤ x
1
≤ u
b
l
b
, if x
1
< l
b
,
(18)
and its gain characteristics illustrated in figure 5, we
can take the saturation function as a dynamic gain
block k
a
, which has maximum value one and con-
verges to zero when the input saturates. Then the
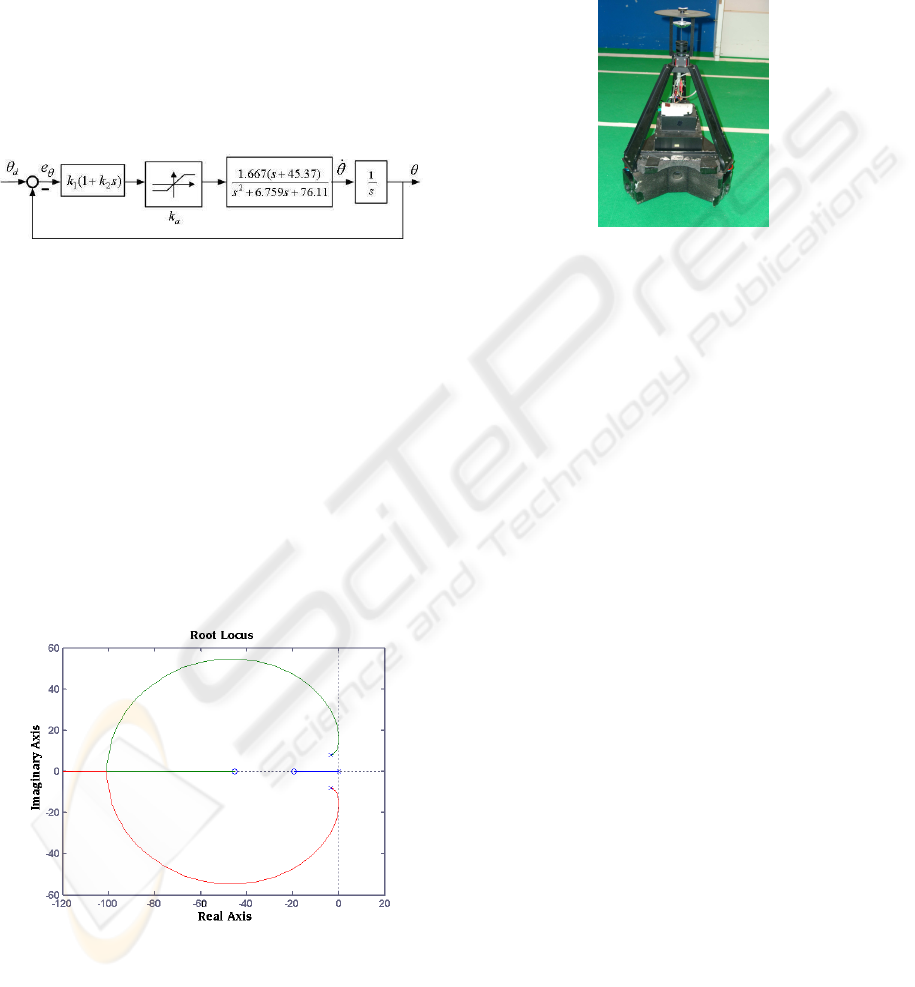
closed-loop system of controlling the robot orienta-
tion is as shown in figure 6, in which a PD controller
is used to control the robot orientation converging to
the ideal θ
d
,
ω = k
1
(e
θ
+ k
2
˙e
θ
), (19)
where k
1
and k
2
are the proportional and deriva-
tive gains, respectively. It can be obtained that the
closed-loop has only one pole
−k
a
k
1
1+k
a
k
1
k
2
and one zero
−1/k
2
. Therefore, when k
2
is negative and k
1
is cho-
sen such that the pole is negative too, the stability of
the closed-loop system can be guaranteed whenever
k
a
decreases.
Figure 5: Saturation function and its gain characteristics.
Figure 6: Closed-loop of robot orientation control.
4 ACTUATOR DYNAMICS
The results in the last section are only practical when
we assume that the low level actuator dynamics is
faster than the kinematics, or the delay of actuator dy-
namics can be ignored. It is necessary to analyze the
actuator dynamics and take it into account when de-
signing a controller. In the following subsections, the
actuator dynamics is identified based on the observed
input-output data, and its influence on the robot mo-
tion control is presented.
4.1 Actuator Dynamics Identification
The system identification problem is to estimate a
model based on the observed input-output data such
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
128
that a performance criterion is minimized. Because
the full rank transformation matrix in the low level
dynamics model (1) denotes the outputs ˙x
m
R
, ˙y
m
R
and ω
are not relevant, we identify the actuator models for
these three values. The inputs of the actuator models
are required velocity values(˙x
m
R
c
, ˙y
m
R
c
and ω
c
), and the
outputs are corresponding measured values. As one
commonly used parametric model, ARMAX is cho-
sen as the identified model, which has the following
structure
A(z)y(t) = B(z)u(t −n
k
) +C(z)e(t), (20)
A(z) = 1+ a
1
z
−1
+ ... + a
n
a
z
−n
a
, (21)
B(z) = 1+ b
1
z
−1
+ ... + b
n
b
z
−n
b
+1
, (22)
C(z) = 1+ c
1
z
−1
+ ... + c
n
c
z
−n
c
. (23)
n
k
denotes the delay from input u(t) to output y(t).
e(t) is white noise. z is the shift operator resulting
in q
−1
u(t) = u(t −1). n
a
, n
b
and n
c
are the orders
of polynomials A(z), B(z) and C(z), respectively. To
choose the optimal parameters of this model, we use
the prediction error method, which is to find the op-
timal n
k
and parameters of A(z), B(z) and C(z) such
that the prediction error E is minimized, namely
[A(z),B(z),C(z),nk]
opt
= argmin
N
∑
t=1
E
2
(24)
E = y
o
(t) −A
−1
(z)(B(z)u(t −nk) +C(z)e(t)), (25)
where y
o
(t) denotes the measured output data.
The system identification toolbox of Matlab has
been used to identify the actuator dynamics model.
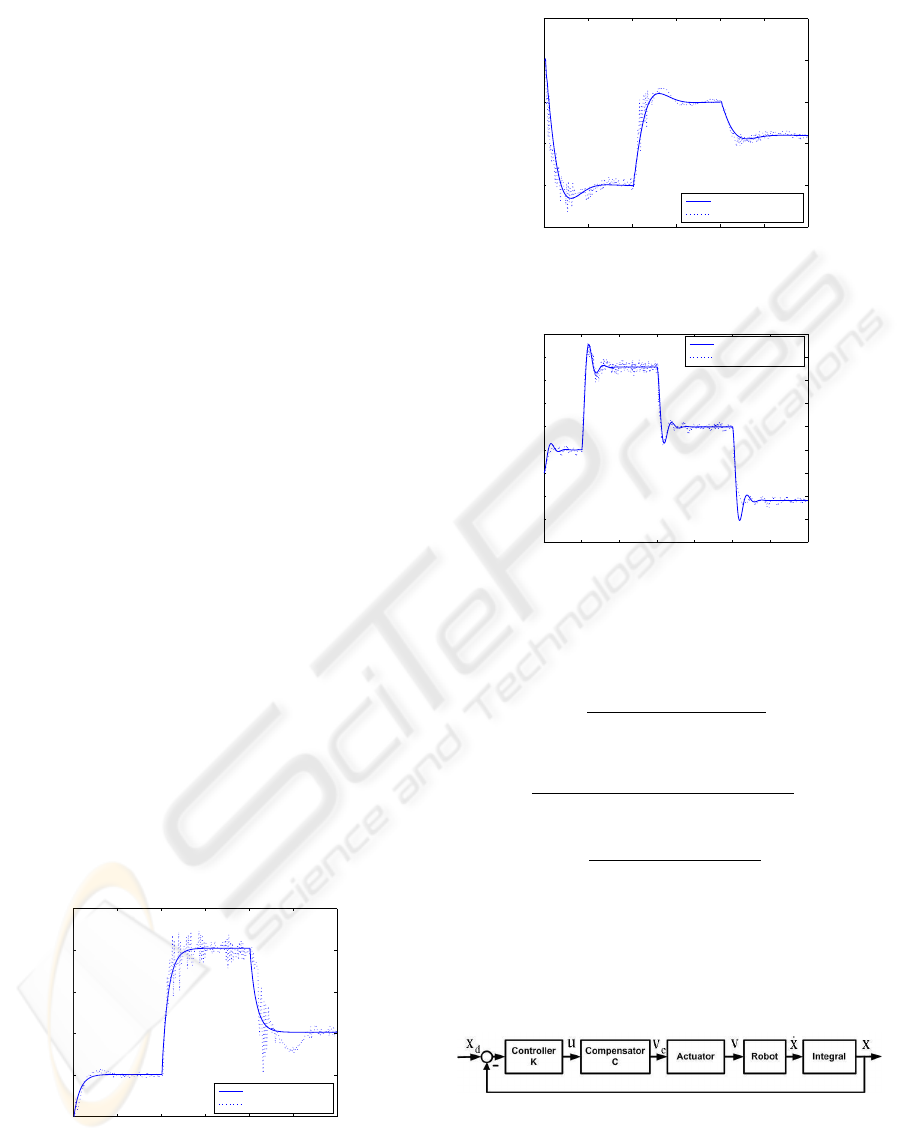
Figures 7 8 and 9 show the optimal parameters and
comparison between models outputs and measured
outputs with respect to the actual inputs.
0 50 100 150 200 250 300
0
0.5
1
1.5
2
2.5
Data number
X−component velocity (m/s)
Identified ARMAX model (na =2, nb =1, nc = 1, nk = 1)
model outputs
measured outputs
Figure 7: Identified model for ˙x
m
R
.
To coincide with the robot’s continuous model, the
identified models are transformed from discrete ones
0 50 100 150 200 250 300
−2
−1.5
−1
−0.5
0
0.5
Data number
Y−component velocity (m/s)
Identified ARMAX model (na =3, nb =3, nc = 2, nk = 1)
model outputs
measured outputs
Figure 8: Identified model for ˙y
m
R
.
0 100 200 300 400 500 600 700
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
3
Data number
Rotation velocity (rad/s)
Identified ARMAX model (na =2, nb =2, nc = 2, nk = 1)
model outputs
measured outputs
Figure 9: Identified model for ω.
into continuous ones using ’zoh’(zero-order hold)
method,
˙x
m
R
=
8.7948(s+ 58.47)
(s+ 73.66)(s+ 6.897)
˙y
m
R
c
, (26)
˙y
m
R
=
2.4525(s+ 48.83)(s+ 6.185)
(s+ 28.45)(s
2
+ 6.837s+ 25.97)
˙y
m
R
c
(27)
ω =
1.667(s+ 45.37)
(s
2
+ 6.759s+ 76.11)
ω
c
. (28)
4.2 Actuator Influence
With consideration of the actuator, thewhole structure
of the control system is shown in figure 10,
Figure 10: Closed-loop control system including actuator
dynamics.
where V
c
= [
˙
X
m
Rc
˙y
m
Rc
ω
c
] is the commanding robot
velocity vector with respect to the robot coordinate
system. Because the poles of the actuators dynam-
ics (26) and (27) have negative real parts, these two
MOTION CONTROL OF AN OMNIDIRECTIONAL MOBILE ROBOT
129
systems are stable. That means there exits a finite
short time t
∗
, after which the real velocities
˙
X
m
R
and
˙
Y
m
R
can converge to the desired ones
˙
X
m
Rc
and
˙
Y
m
Rc
, and
the inputs u
1
and u
2
begin to take effect. Therefore,
the above path following law can also guarantee the
robot approach to the reference path, although during
t
∗
the deviation distance x
n
and angular error
˜
θ
R
may
increase.
In the orientation tracking control, as the dynamic
system (28) adds another two poles to the closed-loop
system, shown in figure 11, the controller parameters
decided in the above section may result the system
losing the stability.
Figure 11: Closed-loop of robot orientation control includ-
ing actuator dynamics.
By setting the positions of poles and zeros of the
closed-loop system with the locus technique, we ob-
tain that the conditions k
1
> 0 and k
2
> 0.0515 can
guarantee the system stability, even when the actua-
tors saturate. Figure 12 shows the root locus of an
open-loop system in the critical situation with k
2
=
0.0515, where all the poles of closed-loop system
locate in the left-half plane whatever positive value
K
a
K
1
is. Otherwise, when k
2
is less than 0.0515,
the root locus may cross the imaginary axis, and the
poles of closes-loop system may move to the right-
half plane when k
a
goes to zero.
Figure 12: Root locus of open-loop model.
5 EXPERIMENT
The control algorithm discussed above has been
tested in our robot laboratory having a half-field of the
RoboCup middle size league. The omnidirectional
robot used is shown in figure 13.
Figure 13: The real omnidirectional robot.
a AVT Marlin F-046C color camera with a reso-
lution of 780×580 is assembled pointing up towards
a hyperbolic mirror, which is mounted on the top of
the omnidirectional robot, such that a complete sur-
rounding map of the robot can be captured. A self-
localization algorithm described in (Heinemann et al.,
2004) based on the 50 Hz output signal of the cam-
era gets the robot’s position in the play field in real
time. The wheels are driven by three 60W Maxon DC
motors and the maximum wheel velocity is 1.9m/s.
Three wheel encoders measure the real wheel veloci-
ties, which are steered by three PID controllers.
An eight-shaped path is adopted as the reference
path, whose geometrical symmetry and sharp changes
in curvature make the test challenging. With a scale
variable s, the chosen eight-shaped path is as
x
r
= 1.8sin(2s)
y
r
= 1.2sin(s),
(29)
The robot was controlled to follow the eight-
shaped path with a constant translation velocity v
d
=
1m/s, and the parameters of our control algorithm
were chosen as k = 2.5, k
1
= 4.15, k
2
= 3. The first
experiment selected the path tangent direction θ
p
as
the desired robot orientation. Figures 14, 15, 16 and
17 show us that the proposed control method steers
the robot center R converging to the given path and
the robot orientation tracking the desired ones with
acceptable errors, where the actuator saturation did
not appear. In order to check the influence of the ac-
tuator saturation, the second experiment selected the
desired robot orientation as
θ
d
= θ
P
+ 0.9c
P
v
2
d
, (30)
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
130
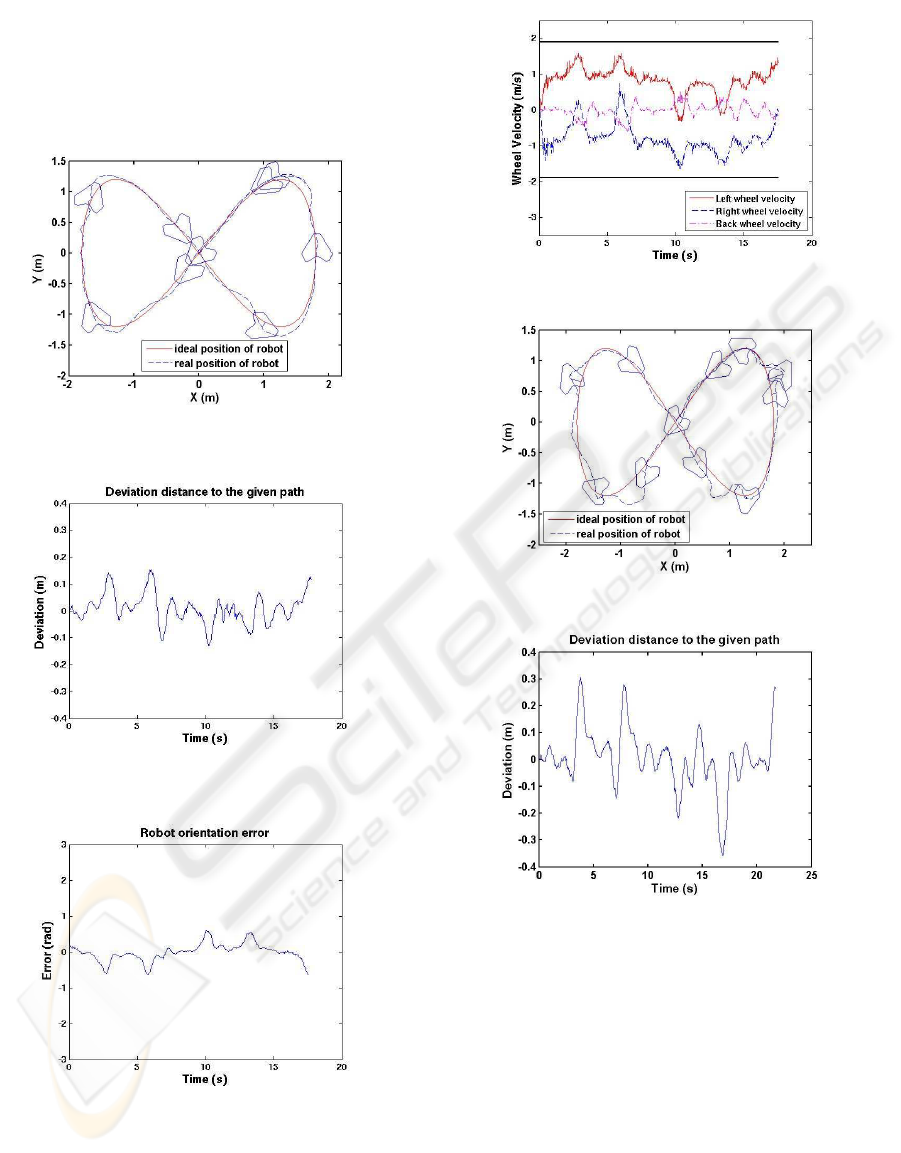
where c
P
is the path curvature at point P. The results
illustrated in figures 18, 19, 20 and 21 show us that
the robot center R converges to the given path, even
though the wheels velocities come in the saturation
when the path turns sharply.
Figure 14: Reference path and robot path.
Figure 15: Distance error.
Figure 16: Orientation error.
6 CONCLUSION
In this paper a new motion control method for an
omnidirectional robot is presented. This approach
Figure 17: Real wheel velocities.
Figure 18: Reference path and robot path.
Figure 19: Distance error.
is based on the inverse input-output linearized robot
kinematic model, which completely decoupled the
robot translation and rotation. The robot translation
is steered to follow a reference path, and the robot
rotation is controlled to track the desired orientation.
Because the actuator dynamics and saturation can
greatly affect the robot performance, they are taken
into account when designing the controller. With the
Lyapunov stability theory, the global stability of the
path following control law has been proven. The lo-
cus technique is used to analyze and choose the suit-
able parameters of the PD controller, such that the
robot orientation can converge to the desired one even
MOTION CONTROL OF AN OMNIDIRECTIONAL MOBILE ROBOT
131
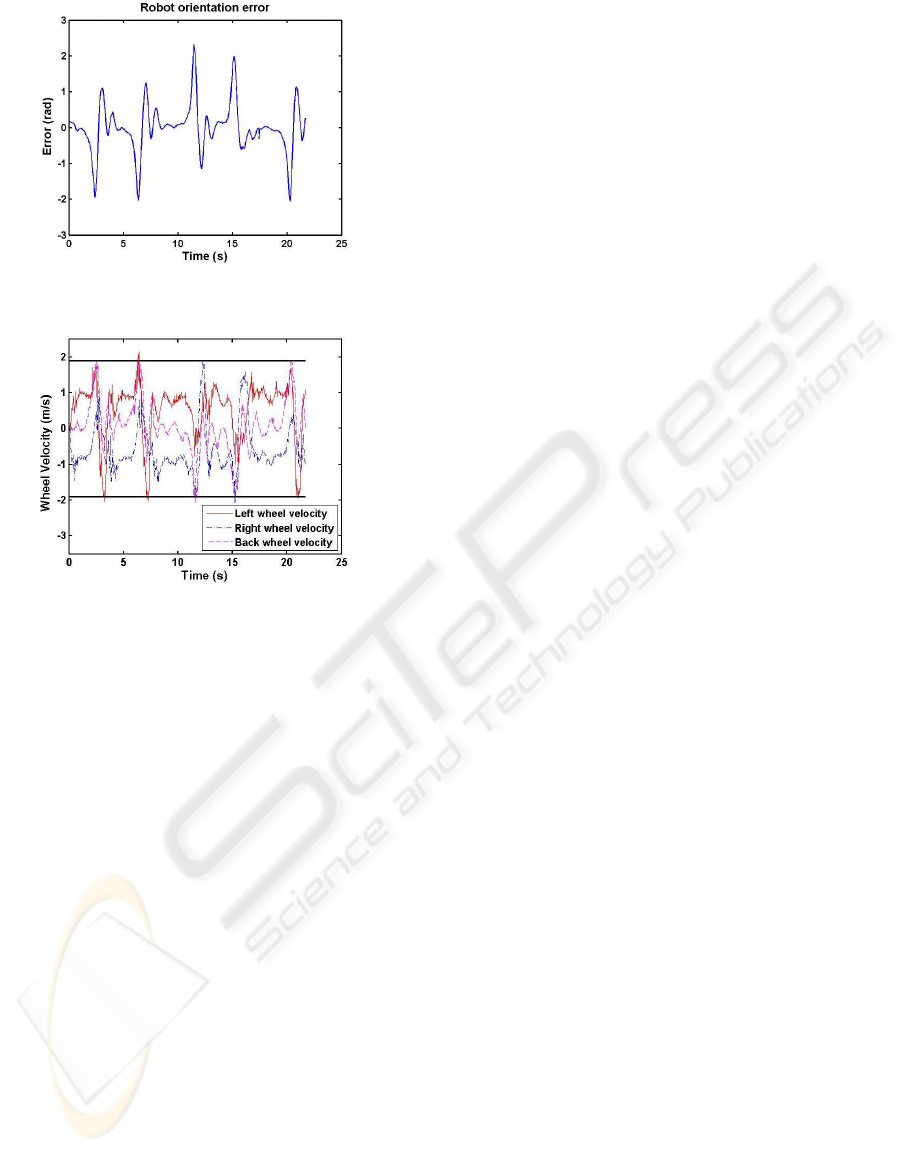
Figure 20: Orientation error.
Figure 21: Real wheel velocities.
when the wheels velocities saturate.
In real-world experiments, the robot was con-
trolled to follow an eight-shaped curve with a con-
stant translation velocity of 1m/s, and to track sharp
changing orientations. The result shows the effective-
ness of the proposed control method in the case of
both actuator saturation and non-saturation.
REFERENCES
Campion, G., Bastin, G., and D’Andr
´
ea-Novel, B. (1996).
Structural properties and classification of kinematic
and dynamic models of wheeled mobile robots. In
IEEE Transactions on Robotics and Automation, vol-
ume 12, pages 47–62.
Heinemann, P., Rueckstiess, T., and Zell, A. (2004). Fast
and accurate environment moddelling using omnidi-
rectional vision. In Dynamic Perception. Infix.
Indiveri, G., Paulus, J., and Pl
¨
oger, P. G. (2006). Motion
control of swedish wheeled mobile robots in the pres-
ence of actuator saturation. In 10th annual RoboCup
International Symposium.
Liu, Y., Wu, X., Zhu, J. J., and Lew, J. (2003). Omni-
directional mobile robot controller design by trajec-
tory linearization. In ACC’03, Proceeding of the 2003
American Control Conference.
Mojaev, A. and Zell, A. (2004). Tracking control and adap-
tive local navigation for nonholonomic mobile robot.
In Proceedings of the IAS-8 conference.
Muir, P. F. and Neuman, C. P. (1990). Kinematic mod-
eling for feedback control of an omnidirectional
wheeled mobile robot. In Autonomous Robot Vehicles.
Springer-Verlag.
Purwin, O. and Andrea, R. D. (2006). Trajectory generation
and control for four wheeled omnidirectional vehicles.
volume 54(1), pages 13–22.
Rojas, R. and F
¨
orster, A. G. (2006). Holonomic Control of
a Robot with an Omni-directional Drive. B
¨
ottcherIT
Verlag, Bremen.
Scolari Conceic¸
˜
ao, A., j. Costa, P., and Moreira, A. (2005).
Control and model identification of a mobile robot’s
motors based in least squares and instrumental vari-
able methods. In MMAR’05, 11st International Con-
ference on Metgids abd Models in Automation and
Robotics.
Scolari Conceic¸
˜
ao, A., Moreira, A., and j. Costa, P. (2006).
Trajectory tracking for omni-directional mobile robots
based on restrictions of the motor’s velocities. In
SYROCO’06, 8th International IFAC Symposium on
Robot Control.
Terashima, K., Miyoshi, T., Urbano, J., and Kitagawa, H.
(2004). Frequency shape control of omni-directional
wheelchair to increase user’s comfort. In ICRA’04,
Proceedings of the 2004 IEEE International Confer-
ence on Robotics and Automation.
Tsai, C.-C., Huang, H.-C., Wang, T.-S., and Chen, C.-M.
(2006). System design, trajectory planning and con-
trol of an omnidirectional mobile robot. In 2006 CACS
Automatic Control Conference.
Watanabe, K. (1998). Control of an omnidirectional mobile
robot. In KES’98, 2th International Conference on
Knowledge-Based Intelligent Electronic Systems.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
132
