
TASK PLANNER FOR HUMAN-ROBOT INTERACTION INSIDE
A COOPERATIVE DISASSEMBLY ROBOTIC SYSTEM
Carolina Díaz, Santiago Puente and Fernando Torres
University of Alicante
Crta San Vicente del Raspeig s/n
PO Box 03080, San Vicente del Raspeig- Spain
Keywords: Human-robot interaction, cooperative, disassembly, task planner.
Abstract: This paper develops a task planner that allows including a human operator which works cooperatively with
robots inside an automatic disassembling cell. This method gives the necessary information to the system
and the steps to be followed by the manipulator and the human, in order to obtain an optimal disassembly
and a free-shock task assignation that guarantees the safety of the human operator.
1 INTRODUCTION
Disassembly is defined as the process of separating
pieces that compose an object (Torres and Puente,
2006). In this process it is very useful to consider
the advantages of cooperative tasks, in which two or
more robots take part, or tasks in which the
intervention of a human being is required (Adams
and Skubic, 2005). Some of those advantages are:
making tasks that a single robot can not do; sharing
information and resources; greater tolerance to
failures; and attending between manipulators and
humans for different tasks. Working in a coordinated
way also provides the system a faster and an
effective disassembly, which allows a consequent
saving of money to the industries that apply it.
The value of a group of entities collaborating
among them, working in group as a team has been
proven many times in many domains. For example,
in nature a group of animals working cooperatively
as a team, can manage to hunt a stronger and bigger
animal. Also in the military service a group of men
with limited resources and specific abilities are
united to create groups with an incredible capacity.
These examples illustrate that a group of entities
with similar or different abilities joined to work in a
team, can produces a work unit with abilities and
capacities greater than the sum of its parts (Navarro-
Serment, et al., 2002). Including two or more agents
working in a cooperative way increases the
performance of the disassembly system, because of
the synergy produces a group of units working
together as a team.
Two groups can be distinguished in cooperative
robots work field:
• Two or more robots working cooperatively to
solve different tasks. This group is called robot-
robot application for forward examples (Tinós and
Terra, 2002; Fonseca and Tenreiro, 2003).
• Cooperative tasks in which robots manipulators
and humans interact, named in this paper robot-
human application (Kumar et al., 2000; Hägele et
al., 2002).
The remarkable issue that differences these two
groups is that when humans and robots interact, the
system must consider more external and internal
sensors in order to avoid humans suffering any
physical damage.
It is important to highlight that this work tries to
use the intervention of a human in task in which the
person has more abilities and general comprehension
than a robot. Robot manipulators transform in
intelligent agents that assist humans in all kind of
task and activities, taking advantages of the
resources and characteristic of each agent and
minimizing the negative properties collaborating
between them.
In the present paper it is observed the advantages
that bring to include a person working in a
cooperative way inside a disassembling cell. Until
recently in most of industrial environments the robot
manipulator was isolated through securities fences,
19
Díaz C., Puente S. and Torres F. (2007).
TASK PLANNER FOR HUMAN-ROBOT INTERACTION INSIDE A COOPERATIVE DISASSEMBLY ROBOTIC SYSTEM.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 19-24
DOI: 10.5220/0001645100190024
Copyright
c
SciTePress
avoiding any possible contact or interaction with
human operators. These were the methods for
guaranteeing the safety of operators inside these
environments (Corke, 1999; Kulic and Croft, 2005;
Ikuta and Nokata, 2003). The present paper set up a
task planner that allows human-robot interaction
taking into account safety aspect.
This article is organized as follows: after the
introduction in Section 2 the process’ architecture is
described. Then, in Section 3, the cooperative task
planner is developed. In Section 4 an application
example is explained. And finally conclusions and
future works are presented.
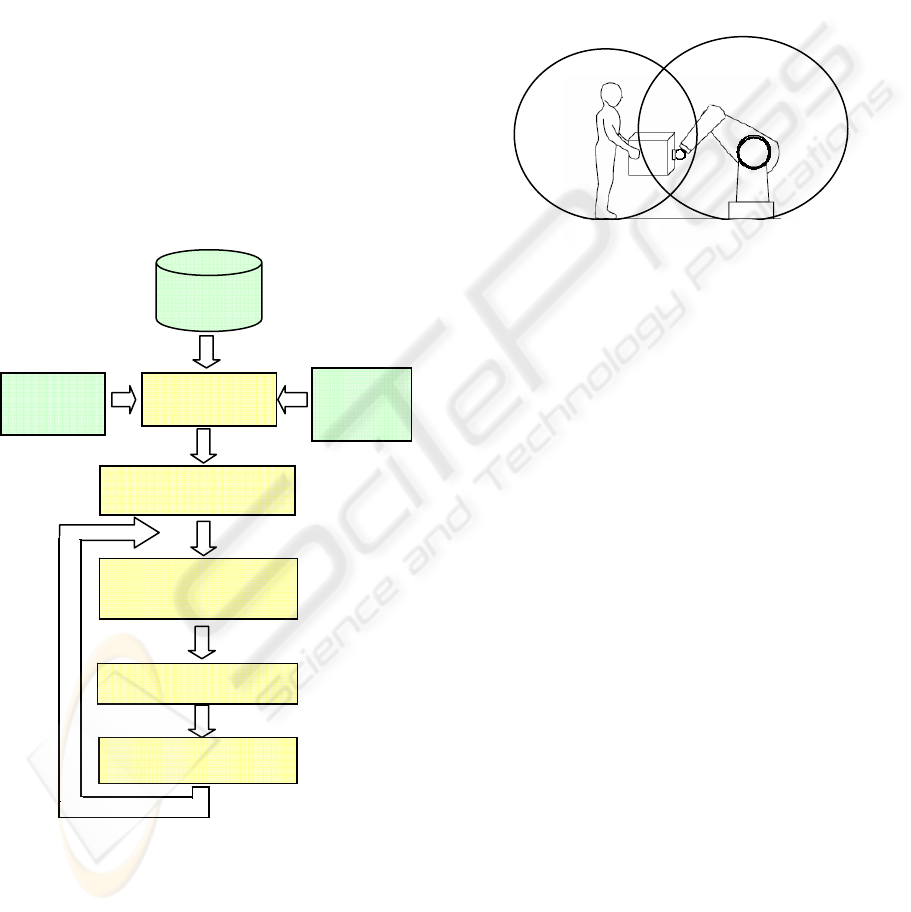
2 PROCESS’ ARCHITECTURE
The process’ architecture used here is the same
developed in a previous work (Díaz et al., 2006); it
is shown in Figure 1.
Figure 1: Process’ Architecture.
In this scheme the Data Base contains a list of
tasks for disassembling products, through a
relational model graph developed in (Torres et al.,
2003). The Task Planner determines which action
corresponds to each agent. Then a position and a
vision control are applied to avoid collisions in real
time between robots and humans, and also collisions
of these with the environment. This grants the
system the possibility of doing on-line corrections.
This control is not developed in this paper.
The Task Planner has all the information of the
layout of the cell, the storage deposits position, and
the location of each agent work area and their
intersection (Fig. 2). This information is very
important in order to avoid collision, between robot
and human and with the environment.
Figure 2: Scheme human robot working areas.
The Task Planner is the one that determines the
sequence to be followed by the manipulator and the
human who take part in the disassembly task;
looking to obtain the maximum advantage of all the
resources, and reducing the total disassembly time.
Is important to highlight the Vision and Position
Control that is the one on charge to detection and
avoid collision, is not develop in this paper. What is
looking for is obtaining an optimal cooperative task
planning that avoids possible collision in the
intersection area, in normal condition. In case, for
example, when accident takes place the Position and
Vision control is the one that have to take the correct
decision. In this project, it is also working with a
special environment (Corrales et al., 2006) that
allow to monitoring the location of the human
operator in real time.
3 TASK PLANNER
The Task Planner developed in this paper for robot
human interaction is based on (Diaz et al., 2006) for
robot cooperative works; it is important to remark
that only a few modifications have been necessary to
adapt this Task Planner for human-robot interaction.
This brings out the flexibility of the proposed
method. The major modifications have to be done in
another block of the system’s architecture, like in the
Vision and Position Control to allow the system
Data Base
Task Planner
Work
Areas
Deposits
Vision and Position
Control
Robot-Human
Environment
Trajectory Planner
1
E
2
E
12
E
Human Robot
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
20
monitoring the human and robot movement inside
the cell.
To reduce risk factors inside an industrial cell in
which robots and humans works Burke et al., 2003
proposed three criteria:
• Redesigning the working cell looking for
the way that the danger is eliminated.
• Control the danger thought sensor or physical
limits.
• Warn and train the human operator which
work in the cell.
In this paper the last two items of these criteria
are considered; controlling the danger through a
vision and position control and educating the person
about the dangers of working cooperatively with
robot manipulators in a disassembly system.
The
dangers are reduced considerably making a suitable
task plan. The planner is the system that determines
to which agent correspond each action execution and
the precise moment to be executed, to obtain a
successful disassembly free of collisions.
Given the relational model graph described on
(Torres et al., 2003), a hierarchical graph that
represent the structure that sets up the product to be
disassembled is obtained. This graph also contains
all the actions to disassemble a product and gives
much useful information, like the precedence and the
parallelism between tasks. Crossing this graph the
rules that specify the sequence to disassemble a
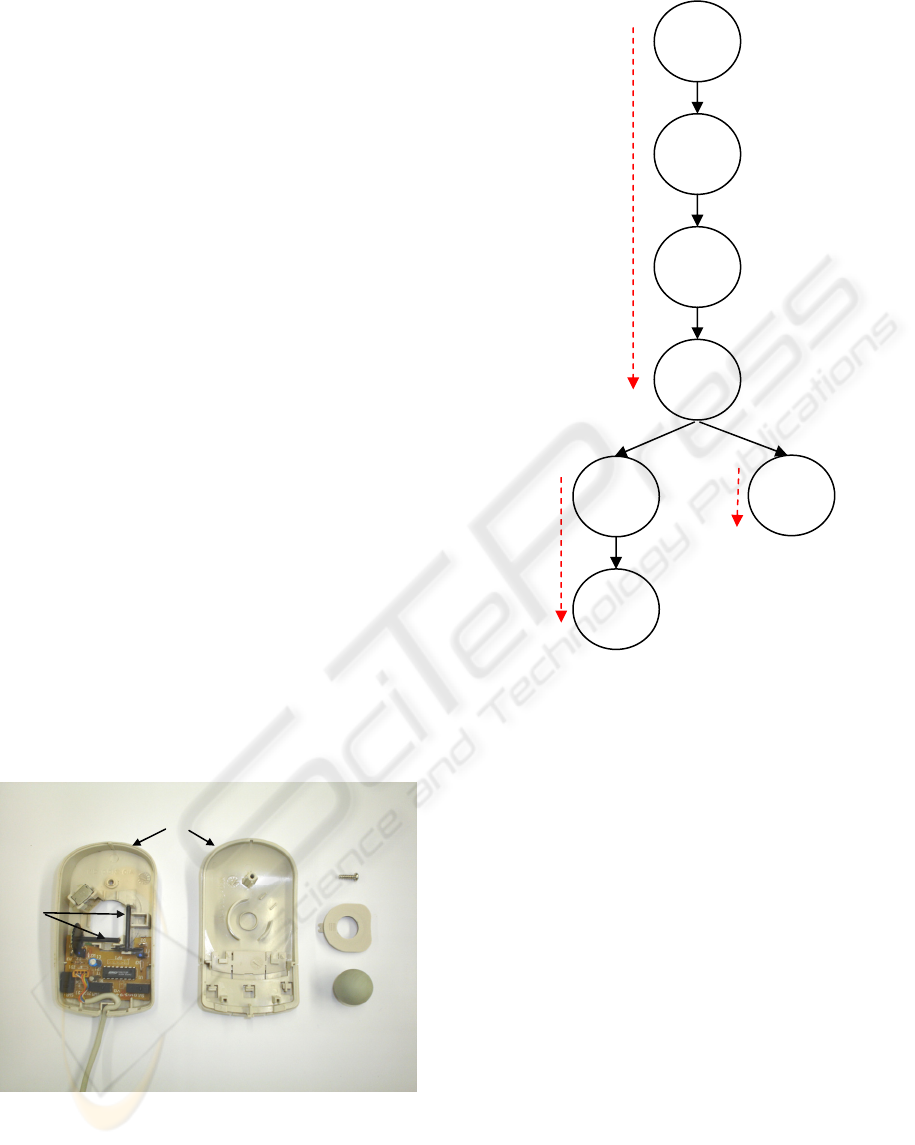
product are obtained. In Figure 3 the component of a
PC’s mouse are shown and in Figure 4 the relational
model graph for disassembly this products is
observed.
Figure 3: Components of a Pc’s mouse.
Figure 4: Hierarchical Graph to disassemble a PC’s mouse.
In Figure 4 the product considered corresponds
with a PC’s mouse. In this case the rules for this
object are:
Rule 1= Remove Top + Separate internal boll +
Remove Screw 1+ Separate external case.
Rule 2 = Cut Cable + Remove CI Board.
Rule 3 = Remove axes.
The Task Planner based on these rules to
constructs the decision trees that allocate the
different tasks between robot and human, to obtain a
cooperative and successful disassembly of a product.
In a working cooperative environment and taking
into account the workspace intersection, two types of
task are defined:
• Common Tasks: are those in which is
required two or more entities working in the
same specific object. For example the
extraction of a CD player.
• Parallel Tasks: those in which each entity
does a specific task. The presence of only one
entity is required. It can be executed in
simultaneous way. For example the extraction
of a Card Slot and simultaneously the extraction of
the Energy Source.
Remove
To
p
Separate
ball
Remove
axes
Cut
Cable
Remove
IC Board
R1
R2
R3
Remove
Screw 1
Separate
Ext. Case
Internal
Ball
Cable
IC Board
Top
Screw
External
Case
Axes
TASK PLANNER FOR HUMAN-ROBOT INTERACTION INSIDE A COOPERATIVE DISASSEMBLY ROBOTIC
SYSTEM
21

11
12
A
Grasp Mouse
A
Deposit Ball
=
=
21
22
A
Extrac Top
A
Deposit Top
=
=
[]
111121
221222
12
, ,...,
, ,...,
, ,...,
p
q
rrr rs
AAA A
A
AA A
AAA A
⎡⎤
=
⎣⎦
⎡⎤
=
⎣⎦
=
[
]
12
, ,...,
n
A
AA
Modelling these rules and according to the type
of task to be executed (Tc o Tp) the decisions trees
are constructed. These determine the assignment of
all the actions to be done; to disassemble the product
in an optimal and cooperative way.
From the relational model graph the different
rules are obtained. These rules are divided into
actions A, for each action corresponds a tool T, and
each action is divided into sub-action if it is possible.
In general, to construct the decision trees and to
model the system, the following sets are defined:
Number of Robots =
12
, ,..., ,...,
ij
RR R R
⎡⎤
⎣⎦
Number of Humans =
12
, ,..., ,...,
ij
H
HHH
⎡⎤
⎣⎦
Task’s Type =
where: Tc: Common Task.
Tp: Parallel Task.
Rules = Task =
each task is divided in actions.
Actions =
and each action is divided into sub-actions
For each action, a respective tool exists. In other
words, it exist the same number of actions as tools:
Tools =
[
]
12
, ,...,
n
TT T
In tasks in where robot and human cooperate.
The actions are assigned to the human due to their
qualities and abilities. It is obvious that the hands are
considered as the tool that the worker used to
execute action.
According to the sets described before and to the
type of task, the trees that determine the optimal
allocations of the actions were constructed like are
developed in (Díaz et al., 2006). In order to
determine the optimal path an information gain is
empirically assigned for each robot or human. In this
work the costs are assigned according to the
characteristics of each action. Time is the most
important characteristic in this application.
There are to highlight that the system does not
handle with synchronizing the task between human
and robot, it only perform the distribution of task
between them. The synchronization between them is
ensured by the vision and position control system.
4 APPLICATION EXAMPLE
Here a disassembled cooperative task is executed
working in a cell compose by only one human
operator and one robot manipulator Mitsubishi® PA-
10. Named
11
and RH respectively
Modeling from Rule 1 obtained from the
relational model graph shown in Fig. 4 it is obtained:
Rule 1= Remove Top + Separate internal boll +
Remove Screw 1+ Separate external case.
It is sub-divide into two tasks:
1
2
= Remove Top + Separate Ball
= Remove Screw 1 + Separate Case.
s
s
T Remove internal ball
T Separate external case
=
=
Executing
s1
T for this application is divided into
two actions according to the corresponding tool used
to execute each action. To execute
s1
T , first one of
the entities has to hold the mouse while the other
removes the top, then:
1
= Grasp mouse + Remove Top + Separate Ball
s
T Remove internal ball =
where:
11112
A
AA
=
+ it is sub-divided in two actions:
where:
22122
A
AA
=
+ it is sub-divide into two actions::
where:
In this application the task is a Common Type
Task Tc. The human and the robot work
simultaneously on the same object, and the work
area must be the intersection
12
E as shown in Figure
2. The decisions trees where the actions are assigned
1
2
(Parrallel Jaw)
(Handing Extraction)
A
Grasp mouse and Separate ball
ARemove top
=
=
[
]
,Tc Tp
[
]
12
, ,...,
m
Ts Ts Ts
⇒
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
22
11
12
the first action is asigned to the robot PA-10.
the second action is asigned to the human.
RA
HA
→
→
result obviously, given the simplicity of the working
cell, then result:
The decision tree shown in Figure 5 is
constructed for planning
s1
T .
Figure 5: Decision Tree
s1
T .
In Figure 5 it is observed that the tool availability
is checked in each moment to make the system more
reliable. There, actions cannot be executed in a
parallel way because of the precedence between
them or to avoid the human may suffer any physical
damage. For example, action
12
A
which corresponds
to deposit the ball, cannot be started until the action
22
A
(human extracting the top) has finished.
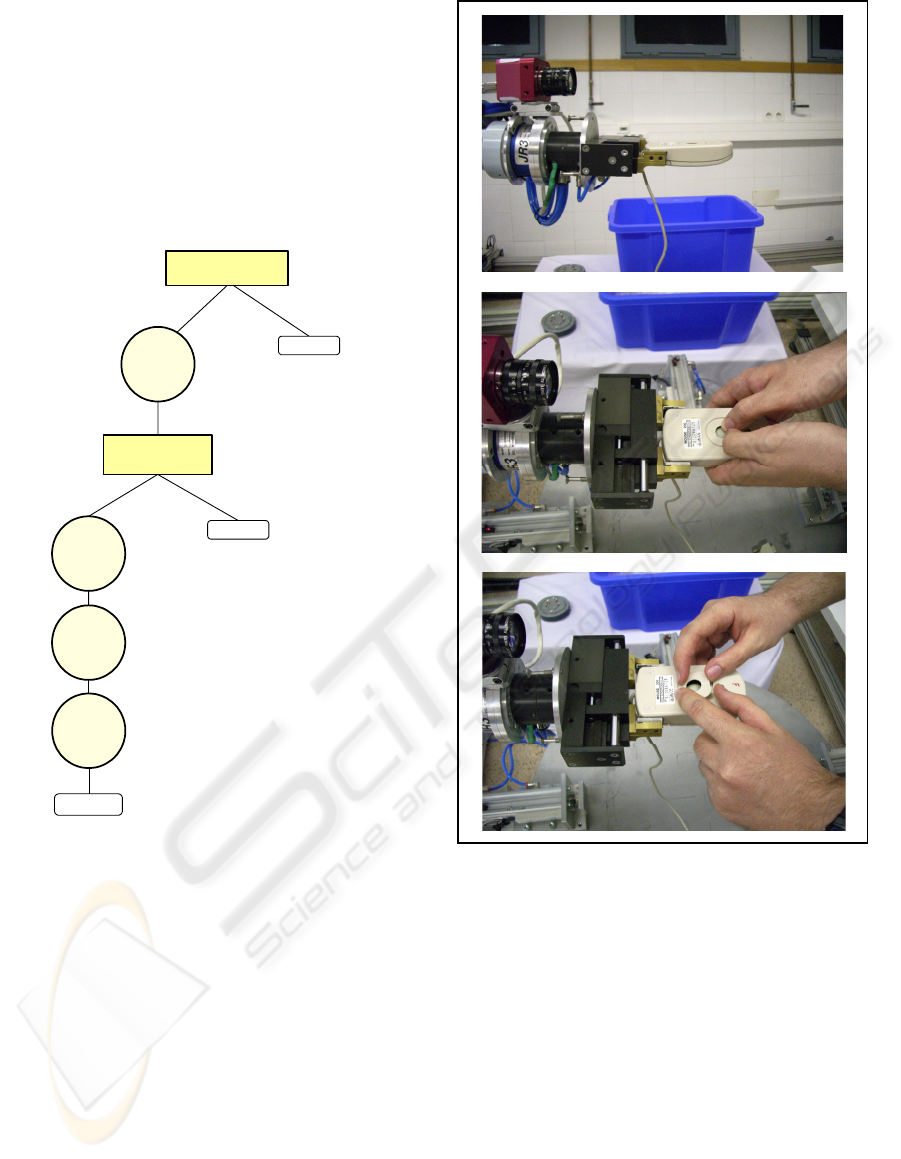
In Figure 6 the real sequence to execute
s1
T is
shown.
Figure 6: Sequence
s1
T .
5 CONCLUSIONS
A cooperative Task Planner is set out. It allows
developing cooperative task between manipulator
and task in which robot and human interaction is
needed inside a disassembly system. The main goal
is to provide a safe and flexible cooperative system.
This system could achieve greater productivity in the
industry.
Robots are use to assist the human operators in
some specific industrial tasks, reduce the fatigue,
and increase the accuracy in areas in which only a
YES
NO
11
?RT⇔
111
RA
NO
ERROR
12
?HT⇔
END
121
HA
122
HA
112
RA
ERROR
YES
TASK PLANNER FOR HUMAN-ROBOT INTERACTION INSIDE A COOPERATIVE DISASSEMBLY ROBOTIC
SYSTEM
23

human can bring global knowledge, experience, and
comprehension in the executing of the task
It is observed, that the modifications made in the
task planning block to adapt it to cooperative tasks
between man-robot, are minimum. Therefore a
future project work might consider extending the use
of the Task Planner to other types of applications
like services robots, where work between robots and
humans has a great potential.
ACKNOWLEDGEMENTS
This work was funded by the Spanish MEC project
“Diseño, implementación y experimentación de
escenarios de manipulación inteligentes para
aplicaciones de ensamblado y desensamblado
automático” (DPI2005-06222), and by the Spanish
G.V. project “Desensamblado automático
cooperativo para el reciclado de productos”
(GV05/003).
REFERENCES
Adams, J., Skubic, M., 2005. Introduction to the Special
issue on Human-Robot Interaction. IEEE Transaction
on System, Man, and Cybernetics. Part A. Vol. 35, No.
4, pp. 433-437
Burke, J., Murphy, R., Rogers E., Scholtz J., Lumelsky V.,
2003. Final Report for the DARPA/NSF
Interdisiplinary study on Human-Robot Interaction.
Transaction IEEE Systems, Man, and Cybernetics.
Part A, Vol. 34, No. 2
Corrales, J.A., Torres, F., Candelas, F., 2006. Tecnologías
en la Inteligencia Ambiental. XXVII Jornadas de
Automática. Almería. Spain.
Corke, P. I. 1999. Safety of advance robots in human
enviroments. Proceeding of the IARP 1999.
Diaz, C., Puente, S.T., Torres, F. 2006. Task Planner for
a Cooperative Disassembly Robotic System.
Proceeding of the 12th IFAC Symposium on
Information Control Problems in
Manufacturing. Lyon. France. Vol. 1, pp. 163-168.
Ikuta, K., Nokata, M., 2003. Safety evaluation method of
desing and control for human care robots. The
International Journal of Robotics Research. Vol. 22,
pp. 281-297.
Kulic, D., Croft, E., 2005. Safe Planning for Human-Robot
Interaction. Journal of Robotics System. pp. 433-436
Navarro-Serment, L., Grabowski, R., Paredis, C., Khosla,
P., 2002. Millibotspag. IEEE Robotics & Automation
Magazine. Vol 9, No. 4, pp 31-40.
Torres, F., Puente, S.T., Aracil ,R. 2003. Disassembly
planning based on precedence relations among
assemblies. The International Journal of Advanced
Manufacturing Technology.Vol. 21. No. 5. pp. 317-
327.
Torres, F., Puente, S.T., 2006. Editorial: Intelligent
disassembly in the demanufacturing process. The
International Journal of Advanced Manufacturing
Technology.Vol. 30. pp. 479-480.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
24
