
A HYBRID INTELLIGENT MULTI-AGENT METHOD FOR
MONITORING AND FAULTS DIAGNOSIS
Gang Yao and Tianhao Tang
Department of Electrical & Control Engineering, Shanghai Maritime University
1550 Pudong Road, Shanghai, 200135, P. R. China
Keywords: Multi-agent system, Monitoring and diagnosis system, Data mining, Fuzzy neural networks.
Abstract: This paper presents a hybrid intelligent multi-agent method for monitoring and faults diagnosis. A new
diagnosis process, combined with data mining and neural networks, are discussed as well as the functions
and structure of agent which implements these algorithms. At last, some simulation results are shown to
demonstrate the efficiency of the proposed system.
1 INTRODUCTION
The rapid development of modern industry calls for
safer and more efficient control processes.
Monitoring and faults diagnosis systems,
specifically combined with artificial intelligent
technologies, are implemented for state monitoring,
trend predicting and fault diagnosis. Thereby, it is
possible to improve the system efficiency and to
guarantee the operation safety in the control process
(Edgar 2000).
A general overview about distributed artificial
intelligence in industry was given in (Parunak 1994).
This paper reviewed the industrial needs for
distributed artificial intelligence, and gave special
attention to the needs arising from systems for
manufacturing, scheduling and control. Since then
more and more researches and contributions have
been done in this field.
However, the complexity of the monitoring and
diagnosis system is growing with the increasing
complexity of industrial plants. To keep the
monitoring and diagnosis system effective, it is
essential to encapsulate different tasks and to define
strict interfaces between plant components and
between components of the monitoring and
diagnosis system, although it is quite difficult. To
guarantee flexibility -- changing needs in case of an
industrial application, the monitoring and diagnosis
system has to be configurable and expandable
without the need of modifying any line of code
(Luder 2001). The diagnostic knowledge about an
industrial process is available on different parties
(process specialists, component manufacturers, etc.).
A modern monitoring and diagnostic system should
be able to integrate the diagnostic knowledge from
all available sources, even if different diagnostic
mechanisms are applied. To achieve an overall
diagnosis of a control process, several diagnostic
tasks have to be performed in parallel. This requires
new strategies to handle diagnostic conflicts that
might occur between different diagnostic results.
Multi-agent system (MAS), about which rapid
progress has been made, is an important research
branch in distributed artificial intelligence (DAI)
parallelized with distributed problem solving (DPS).
Possessing modularity, adaptability and other
attractive characteristics, MAS drew much attention
in recent years and is adopted by many researches in
monitoring and diagnosis system.
This paper presents a hybrid intelligent mutli-
agent method for monitoring and faults diagnosis,
which separates fault diagnosis process into several
steps excuted by different types of agents. The
macroscopical architecture of the MAS system and
microcosmic structure of an agent are designed in
section 2. Then, the intelligent monitoring and fault
diagnosis process is presented in section 3. At last,
the simulation experiment, applying the proposed
method in marine engine room, is carried out in
section 4.
155
Yao G. and Tang T. (2007).
A HYBRID INTELLIGENT MULTI-AGENT METHOD FOR MONITORING AND FAULTS DIAGNOSIS.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 155-160
DOI: 10.5220/0001647501550160
Copyright
c
SciTePress
2 SYSTEM ARCHITECTURE
2.1 Architecture of Proposed System
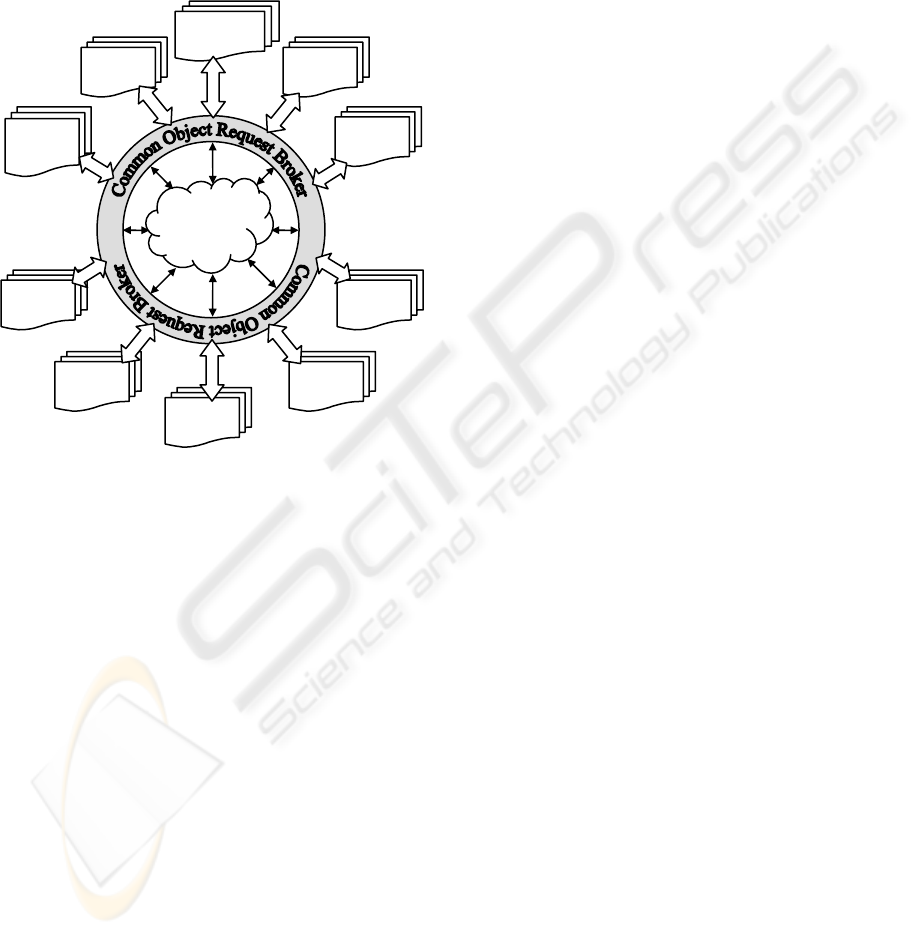
The framework of hybrid intelligent multi-agent
method, with hierarchical and federal organized
software agents that are responsible for different
tasks, is presented in figure 1.
Figure 1: Architecture of MAS-based monitoring and
diagnosis system.
As shown in figure 1, many agents with different
capabilities are connected together by accessing
common object request broker (CORBA)
functionalities and through communication networks
to form a multi-agent society. In this society, each
individual has a special ‘survival skill’ that can work
autonomously and independently. For example,
when this MAS is connected to a control system, the
data access agent, who has the skill of accessing
database, it can get signals periodically and
automatically from given sensors and store them into
a record set with the intelligence of maintenance the
integrity of database.
On the other hand, like human beings, agents in
the figure trend to seek cooperation to fulfil more
difficult task if they believe that better rewards will
gain by cooperation or the job assigned to the
agents is impossible to achieve with their own
capability. A cooperation coalition will form
successfully if following precondition is met
v(A
1
)+ v(A
2
) ≤ v(A
1
+A
2
), (A
1
∩A
2
=φ)
(1)
Where v(A
1
) is the benefit gained by coalition A
1
after A
1
accomplished a job.
Management agent is the one who take charge of
negotiation within the formation of a cooperation
coalition. When a task is received, management
agent decomposes the task into sub-jobs or steps if
necessary, and then adopts contract net protocol to
distribute them to appropriate agents to form a
cooperation coalition. Other agents decide whether
to respond to the bidding or not according to the job
been doing, priority and rewards. After the mission
is accomplished, the cooperation coalition will
dismiss automatically.
This MAS approach will bring us following
advantages: Modularity and scalability, instead of
adding new capabilities to a system, agents can be
added and deleted without breaking or interrupting
the process; Adaptability, agents have the ability to
reconfigure themselves to accommodate new
changes and faults; Concurrency, agents are capable
of reasoning and performing tasks in parallel, which
in turn provides more flexibility and speeds up
computation; Dynamics, agents can dynamically
collaborate to share their resources and solve
problems and finally, Reliability, MAS are more
fault-tolerant and robust than traditional AI systems.
2.2 Architecture of an Intelligent Agent
At agent level, all the agents in proposed method
have the same hybrid behaviour architecture, where
the agents are capable of reactive and deliberative
behaviours. In general, the agents should be neither
totally deliberative nor totally reactive. If they are
only reactive, they cannot reason about their actions
and will not be able to achieve any sophisticated
behaviour; if they are just deliberative they may
never be able to act in time. The proposed
architecture is based on horizontal layering where all
layers are connected to the perception and actuation
of the agents with the environment. Figure 2 shows
the proposed agent architecture in monitoring and
diagnosis system.
In figure 2, an agent can collect information from
two channels: the perception module, which
apperceives from the ambient and to check the
influence of last action, and the communication
module, which receives message from other agents.
All the perception information is distinguished as
‘urgent’ or ‘not urgent’ based on the signal type,
priority, security policy and experience in order to
trigger corresponding response mechanism.
Clustering
Agent
FNN
Agent
RPCA
Agent
PDRNN
Agent
Local GUI
Agent
Remote GUI
Agent
Conflict
Resolution
A
g
ent
Managemen
t
Agent
DF
Agent
Data access
Agent
Communication
Networks
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
156
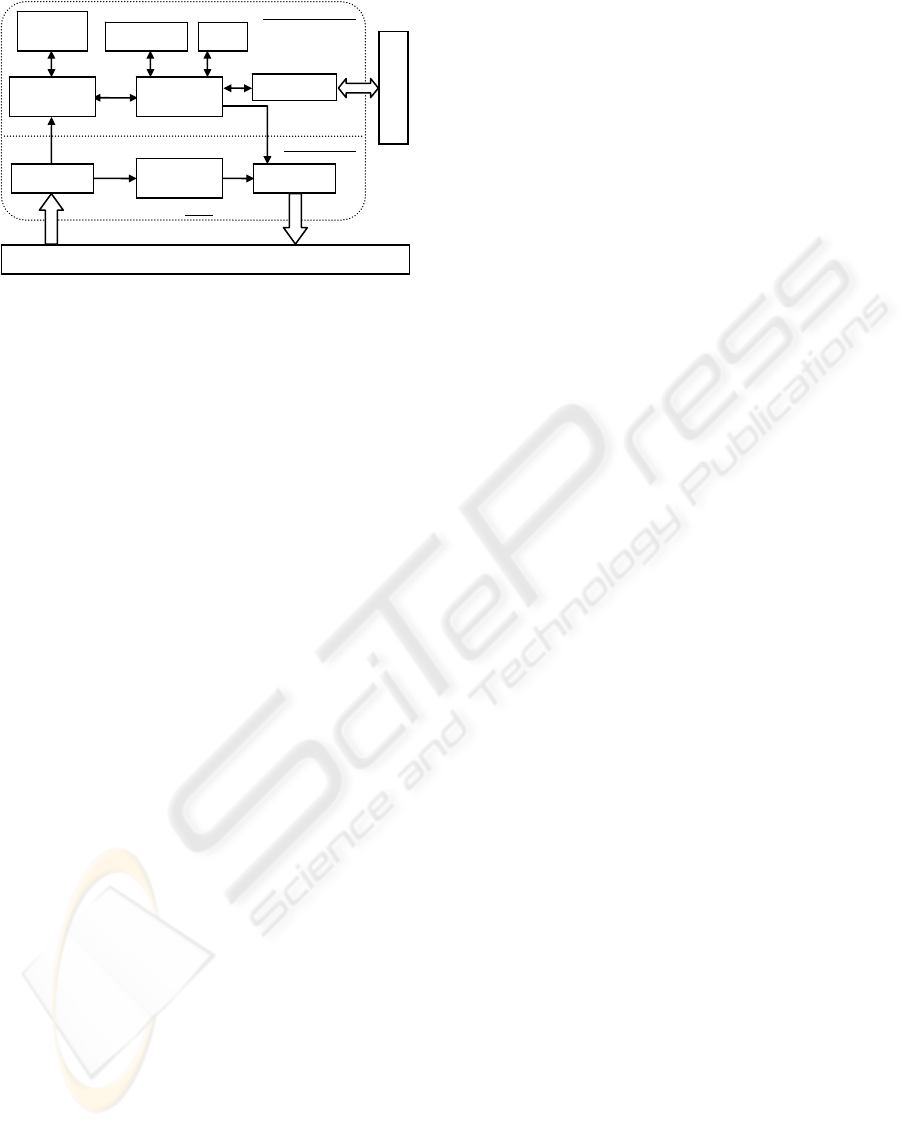
Figure 2: Architecture of an agent.
If an urgent message is received, the reactive
layer will be triggered, and the agent will execute
according to the most similar rule in rules library
without thinking. The reactive rules library could be
modified in accordance with the experience
automatically.
If the message is not urgent, the agent will
‘think’ for a while about how to respond. In this
period, agent uses its special ability to process this
information and then make decision with the
consideration of mental state, knowledge and its
goal. After the agent’s action is executed, if the
action really works, the agent will record this action
as a paradigm into reactive rules library and update
the mental state, knowledge base if necessary.
When the agent finds the job got from the
message is too difficult to accomplish, three options
are available: (1) if the agent know who can help it,
it will ask for help directly to that agent; (2) if the
agent has no idea who is the right agent, it will
contact the management agent to try to organize a
cooperation coalition; (3) if no one responds its
request, abandoning the goal is its last choice.
The special capability mentioned above is the
agent’s ‘survival skill’ encapsulated in information
processing module (IPM). Different method in IPM
determines different type of agent. As shown in
figure 1, ten kinds of agent are designed in this
system:
(1) Local and remote GUI agent: local and
remote graphical user interfaces (GUI) are used by
the operator users to display monitoring and
diagnosis results, initiate diagnostic processes, give
a phonic or flaring alarm, and receive user’s
instructions locally and extendedly.
(2) Management agent: management agent is
used to decompose task and start organizing
cooperation as mentioned in section 2.1.
(3) Conflict resolution agent: a conflict
resolution mechanism is required to investigate
whether the diagnostic results, as reported by
different diagnostic agents, are contradicting or
completing each other. The diagnostic agents do not
communicate with each other to merge their
knowledge, but do report their diagnosis to a conflict
resolution agent. For this purpose, the history credit
evaluation of a diagnosis agent is important. Beyond
this, knowledge of relations among the components
and among the possible failures which may be
related within the components, need to be well
known (H.Worn 2002).
(4) Directory facilitator agent: the directory
facilitator (DF) agent is responsible for
communication and agent management. It can
provide the naming service, represent the authority
in the platform and also provide Yellow Pages
service by means of which an agent can find other
agents providing the services he requires in order to
achieve his goals. All the capabilities of the
registered monitoring and diagnostic agents and the
available CORBA functionalities are managed by
the facilitator agents.
(5) Data access agent: what data access agent can
do has discussed as an example in section 1.
(6) Clustering agent, Relative Principal Com-
ponent Analysis (RPCA) agent, Parallel Diagonal
Recurrent Neuron Network (PDRNN) agent and
Fuzzy Neural Network (FNN) agent: these agents
are dealing with monitoring and diagnosis process
which will be discussed in next section.
3 INTELLIGENT MONITORING
AND DIAGNOSIS PROCESS
Faults diagnosis for complex control system is the
process of mining valuable omen variables from
mass data collected by sensors and mapping omen
variables to faults modes. Thereby data mining plays
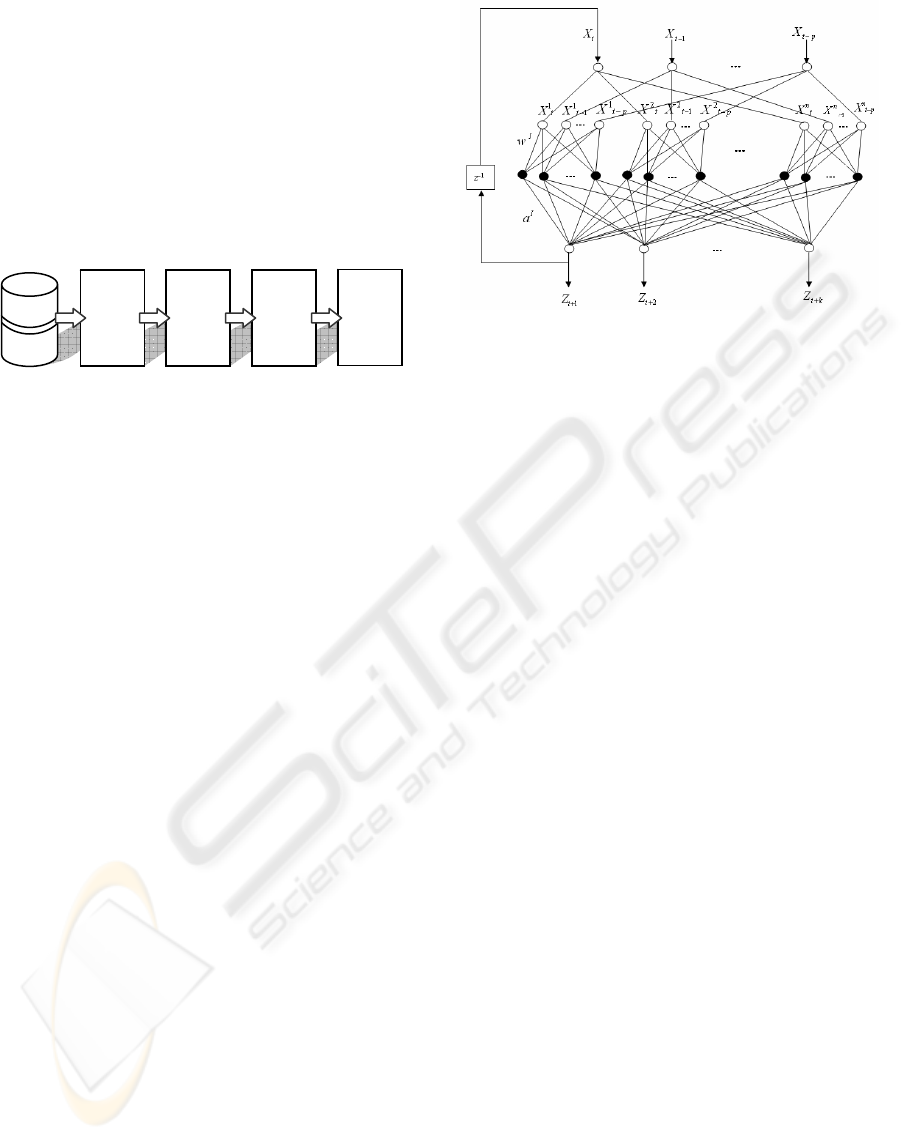
an important role in diagnosis. In this paper, a new
hybrid intelligent monitoring and diagnosis method
is proposed in figure 3. This method divided the
process of data mining and fault mode mapping into
several independently data fusion modules, which
are implemented by agents:
(1) Database: database is made up with two main
storage areas, which correspond to history and
online data access respectively. History data are
used for intelligent data mining, executed by
collaborated agents, and real time data are collected
by the data access agent from sensors.
Other Agent
Reactive
Rules
Information
Processing
Mental
State
Knowledge Goal
Urgent
Ambient
Not urgent
Decision
Making
Perception
Agent
Deliberation Layer
Reactive Layer
Communication
Action
A HYBRID INTELLIGENT MULTI-AGENT METHOD FOR MONITORING AND FAULTS DIAGNOSIS
157
(2) Pre-processing module based on clustering
methods: This module is executed by clustering
agent. Data selection and data mining usually do not
need all the data, some data object and propriety has
no contribution to the modelling, on the contrast
they will greatly reduce the efficiency of data
mining, even will lead to the variation of data
mining result. In this case, it is very necessary to
select data effectively. Pre-processing module based
on clustering methods can select the preventative
points as feature data and filter some fake data.
Figure 3: Data mining based intelligent information fusion
method.
(3) Data reduction module based on RPCA:
Data reduction will figure out the essential data set
to shrink the scope, which is the further step of
reduction based on data selection. Data reduction
also is called as data enriching, the process of which
is transferring the original data set to the more
compact data set without losing any semantics.
Herein Relative Principal Component Analysis
Algorithm (RPCA) is adopted and encapsulated in
the IPM of RPCA agent, which can avoid the
parameters having bigger absolute values or
variation values to play the great role when getting
main element, which is the shortage of PCA method.
For RPCA, more representative main element can be
got from the data array made up with evenly
distributed system variables series. This module is
majorly used to reduce data dimension and extract
system feature (Tianhao Tang 2005).
(4) Trend prediction module based on neural
network: Prediction mode can predict some
phenomena or data value. Parallel Diagonal
Recurrent Neuron Network (PDRNN), which is
implemented in PDRNN agent, can realize multiple
dimension and parallel time frequency prediction,
and it has the high prediction precision to make its
result good for the fault trend analysis. The
architecture of this neural network is shown in figure
4. The transfer function of neuron adopts Sigmoid,
and training method is back propagation algorithm.
Details about this neural network refer to (Tianzhen
Wang 2004).
Figure 4: Architecture of PDRNN.
(5) The last step is to do system fault detection
based on omen variable and parameters prediction.
The core issue of fault diagnosis is to abstract signal
feature and to establish the relationship between the
features and different functional states. More
complex modern industry system has more complex
faults. One fault often demonstrates many omens,
while one omen maybe includes information about
many kinds of faults. The relationship between
omen and fault is hard to be expressed by precise
mathematic expression, so fuzzy logic diagnosis
method can be used. The basic principle of fuzzy
logic diagnosis is to establish the fuzzy relation
matrix
R
~
between fault mode (cause) and omen
variable according to the known information, then to
select omen membership vector X. The fault mode
membership matrix Y can be calculated from fuzzy
relation equation Y=X*
R
~
, thus fault causes can be
diagnosed.
The uncertain relationship between fault and
omen can be well expressed in fuzzy diagnosis, but
the relation matrix
R
~
is hard to be established. On
the other hand, fault diagnosis can be regarded as a
kind of pattern recognition which maps the fault
omen to fault causes. The relation matrix
R
~
reflects
the mapping. For the complex system, the mapping
is non-linear. A fuzzy neural network (FNN) is used
to establish the matrix
R
~
, as shown in figure 5
This FNN is realized in FNN agent, and two new
fuzzy operators, the generalized probability sum
operator and the generalized probability product
operator, are used as transfer function to express the
concepts of the generalized union and the
generalized intersection calculating. Details about
the FNN refer to (Tang, etc., 1998).
History
Online
Database
Pre-treat
module
based on
clustering
methods
Data
reduction
module
based on
RPCA
Trend
prediction
module
based on
PDRNN
Faults
diagnosis
module
based on
FNN
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
158
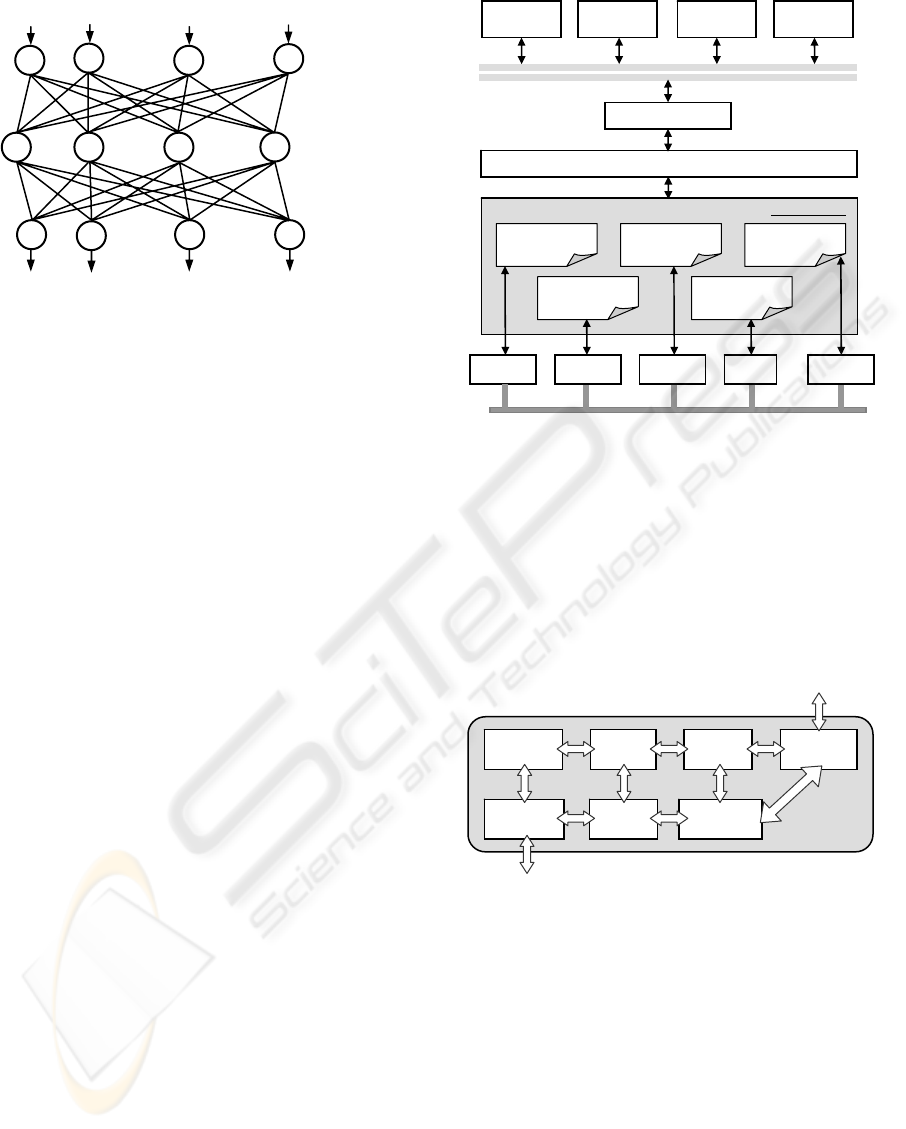
Figure 5: Architecture of fault diagnosis neural network.
4 SIMULATION EXPERIMENT
The hybrid intelligent multi-agent monitoring and
diagnosis system mentioned above has been used in
marine engine room, which is a typical complex and
distributed system.
Marine engine room is made up principally with
main engine remote control & protection system
(MECS), auxiliary engine control system (AECS),
ship power station automatic control system (PSCS),
boiler automatic control system (BCS), cabin
monitoring and alarm system (CMAS), and pump
control system (PCS), etc. For every sub systems, a
cooperative coalition is formed to implement
monitor and diagnosis.
The overall
state monitoring and fault diagnosis
system for marine engine room is shown in figure 6. The
architecture of a
cooperative coalition is shown in
figure 7.
As mentioned before, there are several different
types of agents sharing the same architecture but
having different capability in the proposed system,
which means that the connotation of IPM is different
according to the functionality of the agent. Thereby,
in figure 6, the architecture of all kinds of agents is
implemented in Jade, but the inner methods of IFM
are coded in different programming language with
consideration of coding convenience.
The monitor and alarm client interface, running
on local and extended GUI agent, and the fuzzy
neural network in FNN agent are coded in Visual
Basic 6.0 (VB6). Other algorithms involving in the
process of intelligent data mining are coded in
Matlab 6.5.
Figure 6: Architecture of marine engine room state
monitoring and fault diagnosis system.
JMatLink, a small toolkit to connect Java with
Matlab, is used to call for the data mining function
in an m-file for Java monitoring agent.
To implement calling VB methods and forms
from Java, Java Native Interface (JNI) mechanism is
utilized.
Figure 7: Architecture of a cooperative coalition.
In this experiment, several faults of main engine
were adopted to test the faults diagnosis system. Ten
parameters of main engine, such as engine cylinder
exhaust gas temperature, maximum cylinder
pressure, etc, are chosen as omen variables.
Table 1 shows the comparison between samples
of normal state and three faults state and diagnosis
results. The acronyms of omen variables are
interpreted in Table 2.
Data access
Agent
RPCA
Agent
Clustering
Agent
PDRNN
Agent
Conflic
t
Resolution
Facilitato
r
Agent
FNN
Agent
CORBA
Plant
Gateway
CORBA
Ethernet network
Extended
GUI Agent
C
ooperat
i
ve
alliance
C
ooperat
i
ve
alliance
C
ooperat
i
ve
alliance
C
ooperat
i
ve
alliance
C
ooperat
i
ve
alliance
Fieldbus
MECS AECS PSCS BCS CMAS
…
M
ulti-agen
t
Extended
GUI Agent
Local
GUI Agent
Local
GUI Agent
1
x
jk
w
ij
w
2
x
i
x
n
x
1
B
2
B
k
B
m
B
1
A
2
A
j
A
h
A
Omen Layer
Rule Layer
Fault Layer
A HYBRID INTELLIGENT MULTI-AGENT METHOD FOR MONITORING AND FAULTS DIAGNOSIS
159
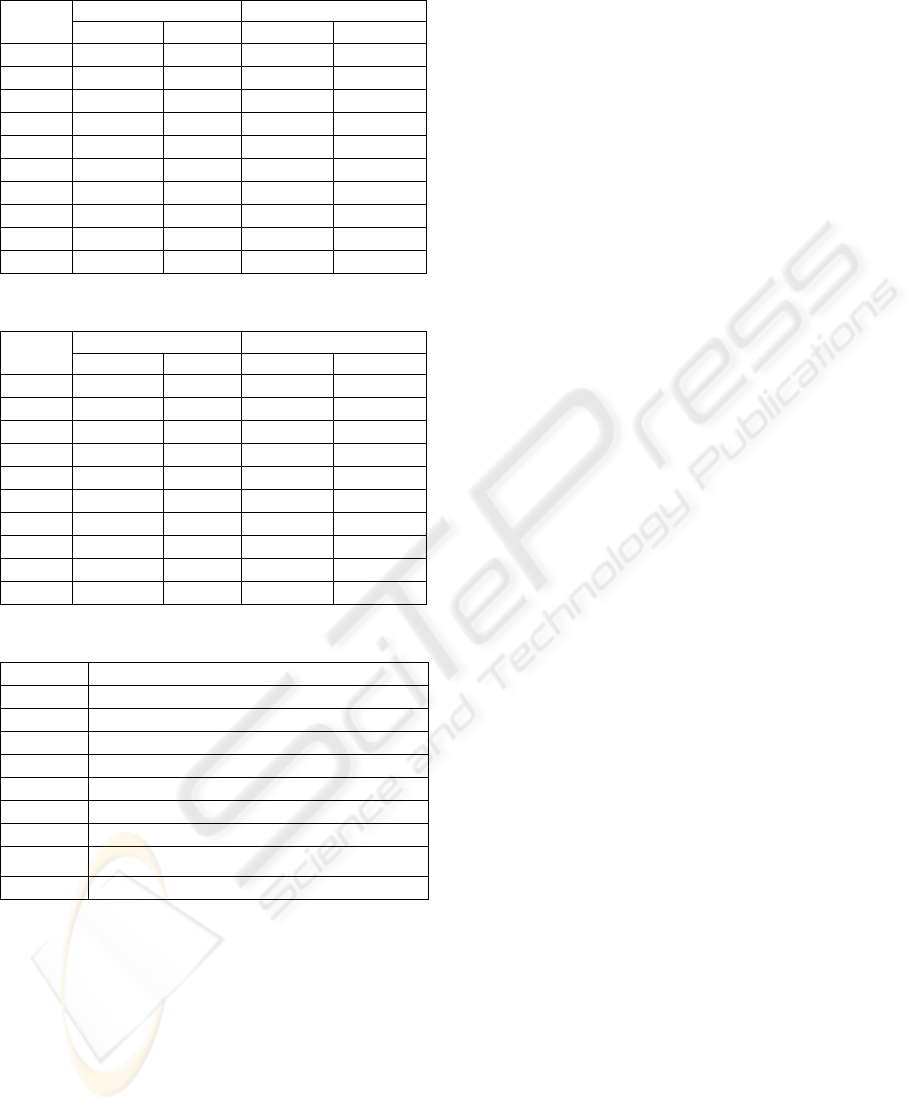
Table 1: Fault diagnosis results.
Normal state Main oil pump abrasion
Sample Result Sample Result
Pmax 0.50 0.485 0.05 0.052
Pcs 0.50 0.488 0.35 0.405
Tcs 0.50 0.499 0.35 0.381
Tex 0.50 0.446 0.20 0.228
Ntk1 0.50 0.486 0.35 0.408
Ntk2 0.50 0.496 0.35 0.408
Pti 0.50 0.495 0.35 0.416
Tto 0.50 0.513 0.35 0.404
Tko1 0.50 0.497 0.35 0.386
Tko2 0.50 0.497 0.35 0.396
Table 1: Fault diagnosis results (Cont.).
Fuel injection late Fuel injection pipe leak
Sample Result Sample Result
Pmax 0.05 0.063 0.05 0.051
Pcs 0.80 0.715 0.20 0.232
Tcs 0.65 0.534 0.35 0.378
Tex 0.95 0.931 0.05 0.141
Ntk1 0.65 0.613 0.35 0.379
Ntk2 0.65 0.612 0.35 0.378
Pti 0.65 0.604 0.35 0.411
Tto 0.65 0.591 0.50 0.512
Tko1 0.65 0.596 0.35 0.407
Tko2 0.65 0.595 0.35 0.402
Table 2: Interpretation of omen variables.
Pmax
maximum cylinder pressure
Pcs
scavenging air pressure
Tcs
scavenging air temperature
Tex
cylinder exhaust temperature
Ntk1
rpm of No.1 turbocharger
Ntk2
rpm of No.2 turbocharger
Pti
inlet pressure of turbocharger
Tto
outlet temperature of turbocharger
Tko1
No.1 air cooler outlet temperature
Tko2
No.2 air cooler outlet temperature
From the table, we can see that diagnosis agent
can get close results compared with the samples, and
it means that fault could be detected exactly. Besides
these faults in Table 1, dealing with other faults,
diagnostic agent can get similar results.
5 CONCLUSIONS
This paper describes a concept of building a hybrid
intelligent monitoring and diagnosing system for
complex control process based on the application of
MAS, and also proposed a new fault diagnosis
process integrates several algorithms implemented
within the MAS method, which allows the flexibility,
the extendibility, and a cost-effective development
of the system. Details about the overall architecture,
algorithm encapsulated in IPM, and coding tools are
discussed. And at last, some simulation experiment
results are given to demonstrate the efficiency of the
presented system.
ACKNOWLEDGEMENTS
This work was supported by National Natural
Science Foundation of China (60572051) and the
project from Shanghai Education Foundation
(05FZ04).
REFERENCES
Edgar, T. F., Dixon, D. A., and REKLAITIS, G. V., 2000,
Vision 2020: Computational Needs of the Chemical
Industry, (University of Texas Press).
Parunak, V., 1994, Applications of distributed artificial
intelligence in industry. In O’Hare and Jennings, (eds)
Foundations of Distributed Artificial Intelligence
(Chichester: Wiley Inter-Science).
Luder, A., et al., 2001, Industrial requirement and overall
specification. Prepared within the PABADIS IST
research project no. IST-1999-60016. Available at
www.pabadis.org.
H.Worn,et al, 2002, A distributed multi-agent architecture
for monitoring and diagnosis
Tianhao Tang, Tianzhen Wang. 2005, ANN-based
multiple dimension predictor for ship route prediction.
Proceedings of ICINCO 2005, Barcelona, Spain
Tianzhen Wang, Tianhao Tang. 2004 A Mult-dimension
Predictor based on PDRNN.ICARCV, P1359-1364
Tang, T. et al 1998. A fuzzy and neural network integrated
intelligence approach for fault diagnosing and
monitoring. Proceedings of the 1998 UKACC
International Conference on Control, vol.2, pp.975-
980. Swansea, UK.
Tianhao Tang, Yao Gang. June 27-29, 2005, A Fault-
tolerant Control Method Based on Adaptive Fuzzy
Neural Networks for Ship Control System, 2005
International Conference on Control and Automation,
Budapest, Hungary
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
160
