
INTERNET-BASED TELEOPERATION: A CASE STUDY
Toward Delay Approximation and Speed Limit Module
Shengtong Zhong, Philippe Le Parc and Jean Vareille
Laboratoire Informatique des Systèmes Complexes (LISyC), Université de Bretagne Occidentale
20, avenue Le Gorgeu, 29285 Brest Cedex, France
Keywords: Remote control, teleoperation, mobile robot, Internet delay, path error, delay approximator, speed limit.
Abstract: This paper presents the internet-based remote control of mobile robot. To face unpredictable Internet delays
and possible connection rupture, a direct teleoperation architecture with “Speed Limit Module” (SLM) and
“Delay Approximator” (DA) is proposed. This direct control architecture guarantees the path error of the
robot motion is restricted within the path error tolerance of the application. Experimental results show the
effectiveness and applicability of this direct internet control architecture in the real internet environment.
1 INTRODUCTION
Internet is not only an information highway, but also
a mean to remotely control mechanical systems, such
as robotic devices. But Internet doesn’t provide a
guaranteed Quality of Service (QoS); it entitles a
number of limitation and difficulties, such as
bandwidth constraint, transmission delays, packet
lost, connection rupture etc. The situation above
influence the performance of Internet based
telerobotics systems, which is a new field in the
recent decade.
The Mercury project (Goldberg et al., 1994) is
o
ne of the earliest telerobotics implementation over
the internet, then coming with the Telerobot in
Australia (Taylor and Dalton, 1997), the painting
PumaPaint Robot (Stein, 1998), and Khepera robot
(Saucy and Mondada, 2000) etc. During the past ten
years, lots of such systems have been introduced by
different researchers all over the world.
Most of these researches use a supervisory
cont
rol scheme which enables operator to issue high
level commands. As the internet time delay is
unpredictable, the design of direct control scheme
which enables user to control the motion of robot
continuously may not be easy. Such control schemes
have been proposed, but are not adequate to alleviate
th
e influence of Internet time delay.
This paper presents direct teleoperation
architecture
of a continuous robot motion control
which meets path error tolerance under the
unpredictable Internet time delay. Here, the path
error is guaranteed only if the path error at every
turning/stop point is restricted within a path error
tolerance which depends on application itself.
Two kinds of control strategy are introduced in
th
e Section 2, followed by the detail of “Speed Limit
Module” (SLM) with the quality level idea of
GEMMA-Q (Ogor, 2001) and how it works together
with the “Delay Approximator” (DA) to meet the
application requirements. During the Section 3, the
software implementation is presented with an
application over Miabot (two-wheeled robot widely
used in soccer competition organized by FIRA).
2 TELEOPERATION
ARCHITECTURE
2.1 Generic Architecture
The teleoperation over Internet lies on a generic
teleoperation architecture (Figure 1), through which
commands are exchanged between remote system
and operator (user). The user, through his Internet
navigator, addresses a request to a Web Server (step
1) and downloads an application, such as a Java
applet (step 2), on his own workstation. A
connection is then established towards the
Application Server in charge of robots and client
management (step 3). In the same time, another
connection with Multimedia Server is also
established in the form of exchanging media signals.
The user is now able to control the remote robot
upon request.
267
Zhong S., Le Parc P. and Vareille J. (2007).
INTERNET-BASED TELEOPERATION: A CASE STUDY - Toward Delay Approximation and Speed Limit Module.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 267-270
DOI: 10.5220/0001648202670270
Copyright
c
SciTePress

The generic architecture is the same in most
applications. The key problem is to alleviate the
influence of Internet time delay and towards a
continuous control within the path error requirement.
Figure 1: Generic architecture.
2.2 Control Strategies
2.2.1 “Move and Wait” Strategy
The “ Move and Wait” strategy (Sheridan, 1992),
which is typical for space robots with long distance
communication has been applied first. In the Miabot
case, five commands: “move forward” (MF), “move
backward” (MB), “turn left” (TL), “turn right” (TR)
and “stop” (ST) have been defined. These commands
are enough to perform any complex task, but the user
has to send lots of commands and change the move
or turn parameters from time to time to meet the
requirement.
2.2.2 “Speed Control” Strategy
To reduce user’s workload and towards a fluent
process during the complex task, a “Speed control”
strategy, similar to real driving, is introduced. “No-
stop move forward” (NSMF), “no-stop move
backward” (NSMB), “turn left” (TL), “turn right”
(TR) and “stop” (ST) commands are defined in this
strategy. When the robot executes a turning
command, it stops running first, perform the entire
turning next, and then runs in previous speed again.
The user may choose different running speed as well
as turning degree.
The user’s operation reduce is significant. The
robot is running with speed
v
during the whole task
even though there is a turning/stop point. When the
user sends a turning/stop command to robot, the
command reaches the robot with a discrete time
delay due to Internet time delay. The robot may
run an extra distance before it performs the
turning/stop.
tΔ
dΔ
tvd Δ×=Δ
Where
v
indicates the current speed of the robot,
t
Δ
is
the current Internet time delay between sending the
command from the user and executing the command
by robot.
As Internet doesn’t provide a guaranteed Quality
of Service (QoS), the time delay is unpredictable.
Figure 2 is an execution result of the task A E
with “Speed control” strategy. The path error is
accumulative, and path deviation is significant which
may result in the failure of the task.
→
Figure 2: A path result with “Speed Control”.
2.3 Speed Limit Module and Delay
Approximator
2.3.1 Speed Limit Module (SLM)
The GEMMA-Q (Ogar, 2001) methodology derived
from GEMMA (ADEPA, 1981) has been proposed.
The basic idea is to define the quality of
communication as a discrete value. Following the
value, the automated system has to follow different
rules to ensure the security (path error). According to
the type of quality, these rules might be different. If
the user has a slightly deteriorated communication
quality, the user might keep the control and the
automated system has to work in deteriorated mode.
The GEMMA-Q has been used in the application
over robot arm and prototype machine (Le Parc et al.,
2001). In this paper, which aims to control a simple
robot, use only the quality level idea of GEMMA-Q
to design SLM.
n
communication quality levels are
introduced which corresponds Internet time delay
zone (Time D.). Each time delay zone has its own
sub path error tolerance
j
ε
Δ
(Sub T.) and Max
Speed as shown in the Table 1.
j
v
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
268
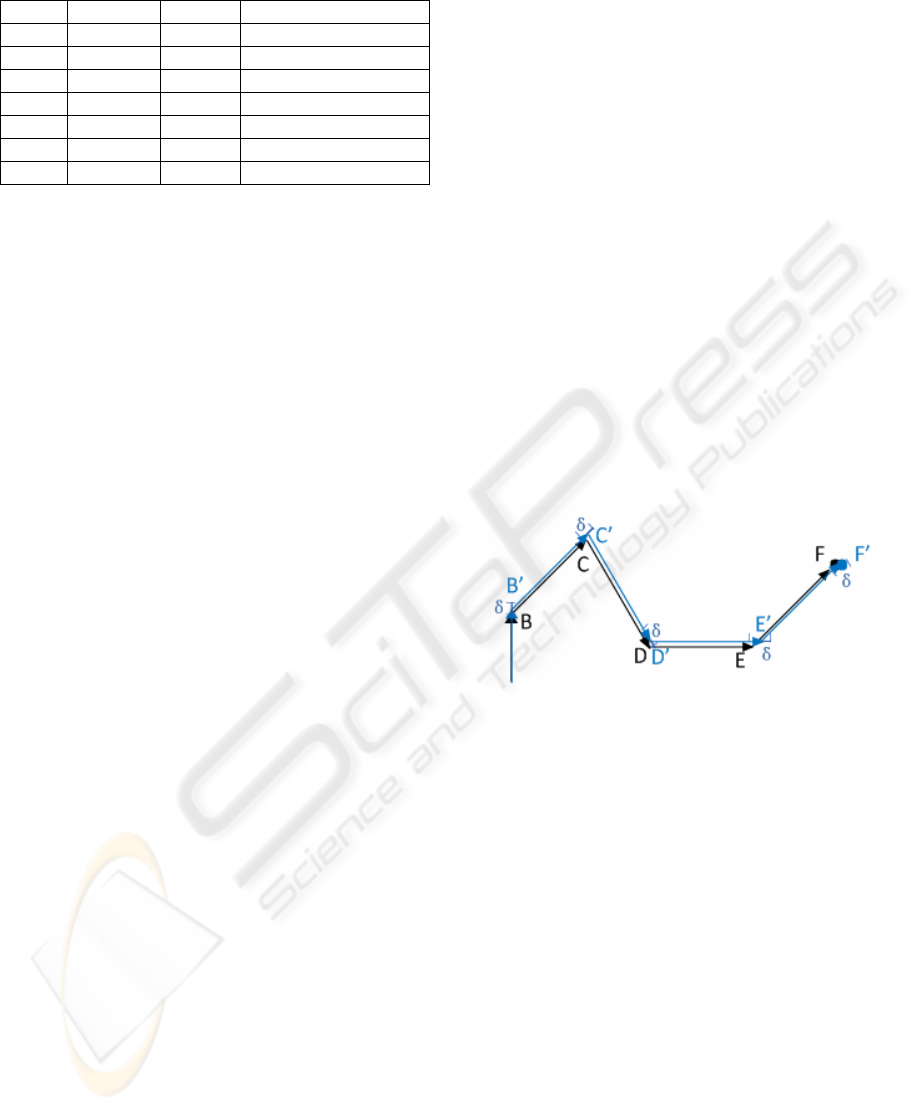
Table 1: Quality levels in SLM.
Qual. Time D. Sub T. Max Speed
0
Q
0
~0 t
0
δ
Δ
000
/tv
δ
Δ=
1
Q
10
~ tt
1
δ
Δ
)/(
0111
ttv
−
Δ=
δ
2
Q
21
~ tt
2
δ
Δ
)/(
1222
ttv
−
Δ=
δ
3
Q
32
~ tt
3
δ
Δ
)/(
2333
ttv
−
Δ=
δ
...
...
...
...
1−n
Q
nn
tt ~
1−
1−
Δ
n
δ
)/(
111 −−−
−
Δ=
nnnn
ttv
δ
n
Q
n
t≥
0
0=
n
v
⎪
⎩
⎪
⎨
⎧
−∈≤
≤Δ
+
=
∑
)1,1,0(
1
0
njvv
jj
n
j
j
"
δδ
When the quality level changes, the Application
Server evaluates the Current Robot Speed (CRS) and
the Max Speed of this quality level (MSoT). If
CRS MSoT, no command is sent to robot; else the
Application Server sends MSoT command to robot
(change CRS to MSoT).
≤
MSoT is calculated by the time delay zone and
sub tolerance which are defined by user according to
application. In order to meet the path error tolerance
δ
at the turning/stop point, the following constraints
are used when designing SLM:
The above constraint guarantees the path error at
the turning/stop point is restricted within
δ
in any
Internet time delay situation.
0
Q
is the best quality
level, its Max Speed
0
v
is the fastest running speed
of the robot.
n
Q
is the disconnection situation, and
the robot stops running immediately . The
proof of how the constraint works are shown below.
)0( =
n
v
There are two kinds of situation when the robot
runs under the speed limit rules.
1. Stable network delay
It means the robot is running in the same time
delay quality level
i
Q
between two continuous
actual Internet time delay (from the real clock
time of receiving previous actual Internet time
delay to the real clock time of receiving next
actual Internet time delay). Then
2. Unstable network delay
The robot is running in the different time
delay quality levels between two continuous
actual Internet time delays. The worst case is
from to :
0
Q
n
Q
δ
δ
δ
δ
δ
≤
Δ=
Δ+
+
Δ
+
Δ
=
Δ
∑
=
n
j
j
n
d
0
10
"
The path error
d
Δ
is within the restriction of
path error tolerance
δ
in both situations. Then the
path error at every turning/stop point in the task is
guaranteed and the successfully continuous control
of the robot is achieved.
With the constraints, the different quality levels
with its respective time delay zone value, sub
tolerance and max speed are defined according to
different application. e.g.: the normal quality level of
Internet time delay is
j
Q
in the application, its sub
tolerance
j
δ
Δ
should take a larger percentage of
δ
. It means the robot is preferred to have larger sub
tolerance in the normal quality level; in the same
time, speed limit rules guarantees
δ
≤Δd
in any
situation.
Figure 3: A path result using “Speed Control” with SLM.
In Figure 3, the path deviation at every turning/stop
point is restricted within
δ
. Then a successful task
is achieved using “Speed control” with SLM. The
above describes the detail SLM with the quality level
idea, next part emphasize on how the gets the quality
level information of current time delay from DA.
2.3.2 Delay Approximator (DA) Principals
δ
δ
δδδ
≤
Δ=
Δ++Δ+Δ=
−++−×+×≤
×=Δ
∑
=
−
i
j
j
i
iii
ii
ttvttvtv
tvd
0
1
0
101100
)()(
"
"
In the generic architecture, Pinger-Ponger is the
mechanism to provide the Internet time delay
information to DA. The next actual Internet time
delay
n
t
Δ
is calculated as follows:
pnn
TTt −
=
Δ
Where
p
is the real clock time of receiving previous
actual Internet time delay from Pinger-Ponger;
n
T
is
the real clock time when Pinger-Ponger sends the
next Internet time delay to DA.With above feature,
T
INTERNET-BASED TELEOPERATION: A CASE STUDY - Toward Delay Approximation and Speed Limit Module
269

the current (up-to-now) time delay from is
formed as:
c
tΔ
p
T
j
t
is the time delay zone in SLM.
c
is the
watchdog and is the automatic counter initialized
with 0.
c
is only activated when there is quality
level change, and this quality level change is used as
tΔ
j
tΔ
current time delay change information.
Pinger-Ponger only provides the Internet time
delay when it gets one. The Internet time delay is
unpredictable, so there is no idea when Pinger-
Ponger gets new information.
There is no idea about the future, but the current
situation is supervised by DA as following principals:
1. DA receives information from Pinger-Ponger.
Pinger-Ponger informs DA of receiving the
next actual Internet time delay, and then DA
forwards the quality level of calculated
n
t
Δ
to
SLM. Meanwhile the previous parameters are set
to be the current ones: the value of
p
T
is set
to
n
, the quality level of previous actual
Internet time is changed to the quality level of
, reset the watchdog .
T
n
2. No information from Pinger-Ponger and
tΔ )(
c
tΔ
c
t
Δ
is activated to a quality level change.
p
is the previous actual Internet time delay.
There are two kinds of situations:
tΔ
•
pc
The quality level of current time delay is
no worse than that of previous actual time
delay; there is no action and DA keeps
supervising.
tt Δ≤Δ
•
pc
The quality level of current time delay
situation is worse than that of previous actual
tt Δ>Δ
Internet time delay. When
c
is activated, it
indicates a change of quality level and “DA”
forwards the new quality level to SLM. DA
keeps supervising.
tΔ
DA keeps supervising the Internet delay situation
all the time. It provides the real Internet time delay
or current time delay to SLM.
3 EXPERIMENT
The remote control system server has been built in
UBO, France. Some users (mainly from France,
Sweden, and China) are invited to test the feasibility
of effectiveness of the system. The average Internet
time delay varies a lot between European users and
Asian users. It’s not easy to find a uniform SLM for
all the users, but certain SLM works fine for some
users. The test is still on-going currently. The
average Internet time delay of the user is able to
observe during the test, so next step consideration is
to build SLM for respective user group
(distinguished by average Internet time delay. e.g.:
Asia, Europe, etc.) and the system can choose
different SLM automatically due to the user group.
⎩
⎨
⎧
∈−=Δ
==Δ
−
),2,1(
0
1
njttt
jtt
jjc
jc
"
4 CONCLUSION
In this paper, the SLM and DA based architecture is
proposed to face the unpredictable Internet delay in
Internet-based robot control. This approach
guarantees the path error of the continuous robot
motion. Here, the path error is guaranteed only if the
path error at every turning/stop point is within a path
error tolerance
δ
which depends on application
itself.
In this architecture, the current time delay is
supervised by DA; and SLM applies different speed
limit rules according to the current time delay
situation. Then the robot is always running in a
proper speed which meets the path error restriction.
Finally, a continuous control of the internet-based
robot is achieved successfully.
REFERENCES
Andreu, D., Fraisse, P., Roqueta, V., Zapata, R., 2003.
Internet enhanced teleoperation toward a remote
supervised delay regulator. ICIT'03, IEEE Int. Conf. on
Industrial Technology, Maribor.
Ogor, P., 2001. Une architecture générique pour la
supervision sure à distance de machines de production
avec Internet. Ph.D. thesis, Université de Bretagne
Occidentale.
ADEPA, 1981. GEMMA: Guide d’études des modes de
marche et d’arrêt.
Meng Wang, and James N.K. Liu, 2005. Interactive
control for Internet-based mobile robot teleoperation.
Robotics and Autonomous Systems, Volume 52, Issues 2-
3, 31 August 2005, Pages 160-179.
K.-H. Han, J.-H. Kim, 2002. Direct Internet Control
Architecture for Personal Robot. Proc. of the 2002 FIRA
Robot World Congress, pp. 264-268, Seoul.
P. Ogor, P. Le Parc, J. Vareille et L. Marcé, 2001. Control
a Robot on Internet. 6th IFAC Symposium on Cost
Oriented Automation, Berlin.
J. Vareille, P. Le Parc et L. Marcé, 2004. Web remote
control of mechanical systems: delay problems and
experimental measurements of Round Trip Time. 2nd
Workshop CNRS-NSF Applications of Time-Delay
systems, Nantes.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
270
