
NEW APPROACH TO GET AUTONOMOUS AND FAST ROBOT
LEARNING PROCESSES
R. Iglesias
1
, M. Rodr
´
ıguez
1
, C.V. Regueiro
2
, J. Correa
1
, Pablo Quint
´
ıa
2
and S. Barro
1
1
Electronics and Computer Science, University of Santiago de Compostela, Spain
2
Dept. of Electronic and Systems, University of Coru ˜na, Spain
Keywords:
Reinforcement learning, mobile robotics, robot control, autonomous agents, genetic algorithms.
Abstract:
Research on robot techniques that are fast, user-friendly, and require little application-specific knowledge
by the user, is more and more encouraged in a society where the demand of home-care or domestic-service
robots is increasing continuously. In this context we propose a methodology which is able to achieve fast
convergences towards good robot-control policies, and reduce the random explorations the robot needs to
carry out in order to find the solutions. The performance of our approach is due to the mutual influence
that three different elements exert on each other: reinforcement learning, genetic algorithms, and a dynamic
representation of the environment around the robot.
The performance of our proposal is shown through its application to solve two common tasks in mobile
robotics.
1 INTRODUCTION
Reinforcement learning seems to be a very interest-
ing strategy, since all the robot needs for learning a
behaviour is a reinforcement function which tells the
robot how good or bad it has performed but nothing
about the desired set of actions it should have carried
out.
The maximization of the reinforcement allows the
robot to learn a utility function of states and actions
called Q-function, which reflects the consequences of
executing every possible action in each state – we will
assume that the robot interacts with the environment
at discrete time steps and it is able to translate the dif-
ferent situations that it may detect through its sensors
into a finite number of states, S –. Table 1 shows
one of the many reinforcement learning algorithms
that can be applied to teach a robot: the truncated
temporal differences algorithm, TT D(λ, m) (Cichosz,
1997). Basically the robot begins with an initial set
of random negative Q-values: Q(s, a) ≤ 0, ∀s, a, and
then it performs a stochastical exploration of its envi-
ronment. While the robot is moving around, it keeps
track of the m last executed actions so that their corre-
sponding Q-values will be decreased or increased de-
Table 1: Truncated temporal differences algorithm.
1. Observe the current state, s(t): s[0]=s(t)
2. Select an action a(t) for s(t): a[0]=a(t)
3. Perform action a(t)
4. Observe new state s(t+1) and reinforcement value
r(t)
5. r[0]=r(t), u[0]=max
a
Q
t
(s(t + 1), a)
6. For k=0,1,...,m-1 do:
if k=0 then z = r[k] + γu[k]
else z = r[k] + γ(λz + (1 − λ)u[k ]), 0 < γ, λ ≥ 1
7. Update the Q-values:
δ = (z − Q
t
(s[m − 1], a[m − 1])])
∆Q
t
(s[m − 1], a[m − 1]) = βδ
pending on whether the robot receives or not negative
reinforcements. The parameters γ, λ, and β (that ap-
pear in table 1), determine how much the Q-values are
changed for every positive or negative reinforcement
the robot receives. As the learning process progresses,
the robot should tend to execute those actions which
seem to be the best ones according to the Q-values,
this is called greedy policy.
Despite the benefits of the RL paradigm in au-
tonomous robot-learning, there are important prob-
292
Iglesias R., Rodríguez M., V. Regueiro C., Correa J., Quintía P. and Barro S. (2007).
NEW APPROACH TO GET AUTONOMOUS AND FAST ROBOT LEARNING PROCESSES.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 292-295
DOI: 10.5220/0001649802920295
Copyright
c
SciTePress

Figure 1: Schematic representation of our approach. Initially the robot moves using the greedy control policy until it finds a
situation it doesn’t know how to solve (a), a genetic algorithm is applied to find a solution (b), once the problem is solved the
greedy policy is applied again (c).
lems to consider when it is applied. First, the time
required to learn a good greedy policy increases expo-
nentially with the number of states and the number of
actions that are possible to execute in each state. On
the other hand, the robot wastes an enormous amount
of time trying actions that are clearly inappropriate
for the task but that are selected randomly during the
learning process.
2 OUR APPROACH
To solve part of the drawbacks just mentioned, we
propose a learning strategy which combines three el-
ements: reinforcement learning (RL), a genetic algo-
rithm (GA), and a dynamic representation of the en-
vironment around the robot (states). Basically, when
our approach is applied the robot goes through three
cyclical and clearly differentiated stages –figure 2–:
a) looking for a new starting position or convergence.
b) exploration, and c) generation of a new population
of solutions (chromosomes) for the next exploration
stage.
2.1 Looking for a New Starting Position
During this first stage the greedy policy is applied to
control the robot. If the robot encounters a situation
where it doesn’t know how to move – local problem,
(figure 1.a) –, it receives a sequence of consecutive
negative reinforcements, and its position several steps
before the failure is established as a new starting po-
sition for the next exploration stage.
2.2 Exploration Stage
Our strategy applies a GA (Davidor, 1991; Cobb and
Grefenstette, 1993) in order to solve each local prob-
Figure 2: Flow diagram which describes the combination of
RL and GA.
lem the robot finds. The GA starts with a population
of solutions called chromosomes. Each chromosome
–represented as π– determines the action the robot has
NEW APPROACH TO GET AUTONOMOUS AND FAST ROBOT LEARNING PROCESSES
293
to carry out at each state, s: π(s). The population
of chromosomes is evaluated according to an objec-
tive function called fitness function, which reflects for
how long a chromosome is able to properly control
the movement of the robot – figure 1.b –. Once a
population of chromosomes has been evaluated, the
sequence of states, actions, and rewards the robot re-
ceived under the control of the best chromosome, is
replicated off-line several times to speed up the con-
vergence of the Q-values.
2.3 Generation of a New Population of
Solutions (Chromosomes)
The population of chromosomes has to be evolved
according to the fitness values. In order to do this,
certain genetic operators like mutation –which carries
out random changes in the chromosomes–, or chro-
mosome crossover –which combines chromosomes to
raise new solutions– have to be applied. We use the
Q-values to bias the genetic operators and thus reduce
the number of chromosomes which are required to
find a solution. Given a particular chromosome π, the
probability that mutation changes the action that this
chromosome suggests for a particular state s: π(s),
depends on how many actions look better or worse
than π(s) according to the Q-values.
On the other hand, one of the chromosomes
should always be the greedy policy because it brings
together all that has been already learnt by the robot,
and it represents the best chance to have a fast conver-
gence towards the desired solution.
Finally, when the robot is looking for a new start-
ing position and the greedy policy is being used to
control it, if the robot moves properly during M steps
before it receives negative reinforcements, only the
states involved in the last K robot’s movements are
susceptible of being changed through the GA, while
the states involved in the initial M-K actions are la-
belled as learnt, so that neither chromosome selection
nor chromosome crossover can alter them.
The population of chromosomes is resized after
its evaluation according to how close the GA is to the
desired solution.
2.4 Dynamic Representation of States
We use the properties of the regular Markov chains
(Bertsekas and Tsitsiklis, 1996) to reduce the num-
ber of states which are considered during the learn-
ing process. The transition matrix and what is called
steady vector are estimated, so that only those states
with a non-cero entry in the steady vector are con-
sidered in the learning procedure. The steady vector
contains the probability of finding the robot in each
possible state in the long-term.
3 EXPERIMENTAL RESULTS
We applied our approach to teach a mobile robot two
common tasks: “wall following” and “door traver-
sal”. We have used a Nomad200 robot equipped with
16 ultrasound sensors encircling its upper part and
bumpers. In all the experiments the linear velocity
of the robot was kept constant (15.24 cm/s), and the
robot received the commands it had to execute every
300ms.
We used a set of two layered Kohonen networks to
translate the large number of different situations that
the ultrasound sensors located on the front and right
side of the robot may detect, into a finite set of 220
neurones – states – (R. Iglesias and Barro, 1998).
3.1 Wall Following
To teach the robot how to follow a wall located on
its right at a certain distance interval, we used a rein-
forcement signal that is negative whenever the robot
goes too far or too close from the wall being followed.
The robot was taught how to perform the task in a sim-
ulated training environment, but its performance was
tested in a different one. Convergence was detected
when the greedy policy was able to properly control
the movement of the robot for an interval of 10 min-
utes.
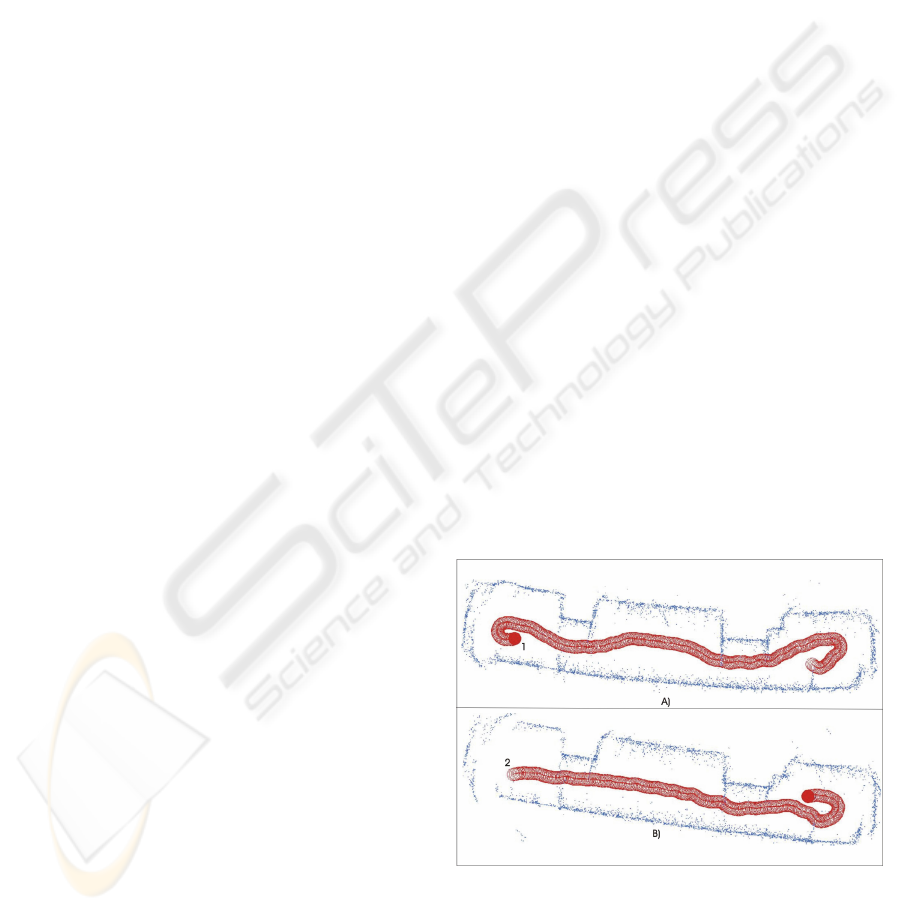
Figure 3: Real robot’s trajectory along a corridor when a
control policy learnt through our approach was used. For
a clear view of the trajectory, figure a) shows the robot’s
movement in one direction and b) shows the movement
along the opposite direction. Points 1 and 2 in both graphs
correspond to the same robot position. The small dots rep-
resent the ultrasound readings.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
294
When we applied our approach the average re-
quired learning time after 19 experiments was only
25 minutes and 9 seconds –the number of chromo-
somes varied dynamically within the interval [3,20].
When the T T D(λ, m) was applied with the best com-
bination of parameters we found – β = 0.35, λ = 0.8,
γ = 0.95 and m = 30–, the average learning time after
6 experiments was 97 minutes and 30 seconds.
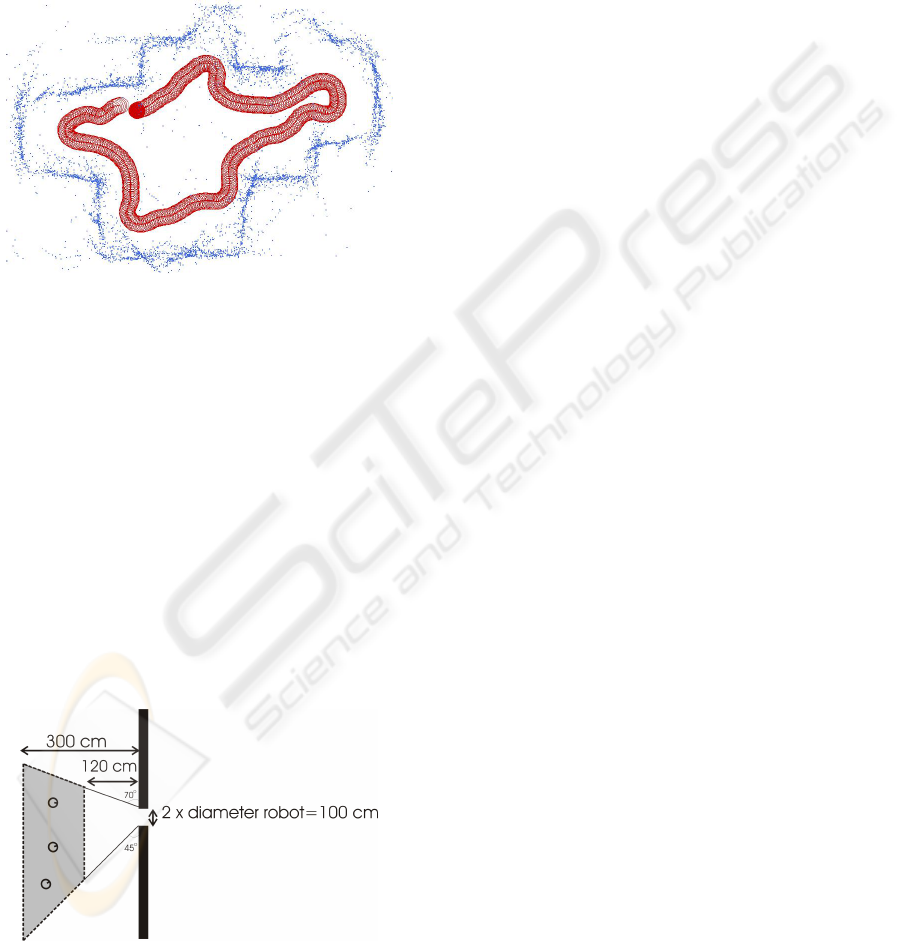
Figure 4: Real robot’s trajectory when the same control pol-
icy as in figure 3 was used.
To prove that the behaviours learnt through our ap-
proach are useful, figures 3 and 4 show the movement
of the robot in two real and noisy environments.
3.2 Door Traversal
We also applied our approach to teach a robot how
to cross a door in the experimental scenario shown
in figure 5. To learn this task the reinforcement is
negative whenever the robot collides with the door-
frame, the robot goes too far from the door, or the
movement direction is so wrong that the robot is not
facing the door any more. After 21 experiments, the
average learning time was 86 minutes and 42 seconds.
Figure 5: Experimental scenario for the door traversal be-
haviour. The initial positions of the robot were within the
shaded area.
4 CONCLUSION
In this article we suggest the use of a new approach
based on the combination of a genetic algorithm and
the reinforcement learning paradigm to teach a robot
how to accomplish different tasks. Our approach is
mainly characterized by three aspects: 1) There are
clearly differentiated exploration stages where the use
of a GA which keeps less information than the RL,
and through which the attention is only focused on
those actions which seem to be profitable, allows the
robot to carry out a fast search of solutions to those
situations where the robot doesn’t know how to move.
2) The information learnt through the reinforcements
– Q-values – is used to bias the genetic operators –
mutation, crossover, selection– and thus improve the
performance of the GA. 3) Finally, the properties of
the regular Markov chains represent a powerful tool
to focus the attention on those states relevant in the
robot’s long term behaviour, avoiding the use of a big
and unnecessary number of states which would delay
the achievement of a good robot-control policy.
ACKNOWLEDGEMENTS
The authors thank the support from grants TIN2005-
03844, PGIDIT04TIC206011PR, TIC2003-09400-
C04-03.
REFERENCES
Bertsekas, D. P. and Tsitsiklis, J. N. (1996). Neuro-Dynamic
Programming. Athena Scientific.
Cichosz, P. (1997). Reinforcement Learning by Truncating
Temporal Differences. PhD thesis, Dpt. of Electron-
ics and Information Technology, Warsaw University
of Technology.
Cobb, H. G. and Grefenstette, J. J. (1993). Genetic al-
gorithms for tracking changing environments. In
Proc. Fifth International Conference on Genetic Al-
gorithms.
Davidor, Y. (1991). Genetic algorithms and robotics. A
heuristic strategy for optimization. World Scientific.
R. Iglesias, C. V. Regueiro, J. C. and Barro, S. (1998). Im-
proving wall following behaviour in a mobile robot
using reinforcement learning. In ICSC International
Symposium on Engineering of Intelligent Systems,
EIS’98.
NEW APPROACH TO GET AUTONOMOUS AND FAST ROBOT LEARNING PROCESSES
295
