
KAMANBARÉ
1
A Tree-climbing Biomimetic Robotic Platform for Environmental Research
Reinaldo de Bernardi
Genius Institute of Technology, São Paulo, Brazil
Department of Telecommunications and Control, São Pau
lo University, São Paulo, Brazil
José Jaime da Cruz
Department of Telecommunications and Control, São Paulo University, São Paulo, Brazil
Keywords: Climbing robots, legged robots, environmental research.
Abstract: Environmental research is an area where robotics platforms can be applied as solutions for different
problem
s to help or automate certain tasks, with the purpose of being more efficient or also safer for the
researchers involved. This paper presents the Kamanbaré platform. Kamanbaré is a bioinspired robotic
platform, whose main goal is to climb trees for environmental research applications, applied in tasks such as
gathering botanical specimen, insects, climatic and arboreal fauna studies, among others. Kamanbaré is a
platform that provides flexibility both in hardware and software, so that new applications may be developed
and integrated without the need of extensive knowledge in robotics.
1 INTRODUCTION
Robotic platforms can be used in countless
applications and in the most varied branches of
activities. Such results, presented over the last two
decades, can be verified in (Armada et al., 2003) and
(Virk, 2005).
It deals specifically with robots provided with
leg
s and with the capability, or ability, to climb
vertical surfaces, while many other
applications/solutions can be found. As an example,
one can mention: robots to climb lower parts of
bridges (Abderrahim et al., 1999), to crawl inside
pipes for inspection purposes (Galvez, Santos,
Pfeiffer, 2001), implemented to perform solder
inspection works in nuclear plants (White et al.,
1998), to climb metallic structures for inspection
purposes (Armada et al., 1990). More examples can
be found in marine industry applications, such as
walking robots to check internal parts solders in ship
hulls, climbing robots for parts solders (Santos,
Armada, Jiménez, 2000) and (Armada et al., 2005),
climbing robots for paint cleaning, underwater
robots for ballast tank inspection, and underwater
robots for hull cleaning (Santos, Armada, Jiménez,
1997a, 1997b).
Robots were demonstrated to be the ideal option
for m
any such applications due to the fact that the
working environment is difficult to access or even
hazardous or risky for human beings, such as
exposure to hazardous substances or environments
and risk conditions. Productivity increase and
quality issues are also extremely relevant and are
considered.
However, besides the varied applications and
areas m
entioned above, there still remains a little
explored area: environmental research. As in any
other area, different applications or problems can be
addressed or solved with the help of a robotics
platform. As an example, one can mention the
activities:
Gathering of Botanical Specimens: g
athering
flower and plant specimen is fundamental for
biodiversity studies. Several host species are found
in high trees, and their collection is actually risky.
Thus, this is an application where a robotics
platform with tree climbing capability can be used to
minimize risks for the researchers involved in this
type of activity.
1
Kamanbaré means chameleon, on the language of the Brazilian Tupi
indians.
478
de Bernardi R. and Jaime da Cruz J. (2007).
KAMANBARÉ - A Tree-climbing Biomimetic Robotic Platform for Environmental Research.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 478-484
DOI: 10.5220/0001650304780484
Copyright
c
SciTePress

Gathering of vegetable material: collection of
vegetable material is a fundamental activity for
phytochemistry. Every pharmaceutical preparation
that uses as raw material plant parts such as leaves,
stems, roots, flowers, and seeds, with known
pharmacological effect is considered phytotherapic
(extracts, dyes, ointments and capsules). Thus, just
as in botanical collection, this is an activity that can
be accomplished by a robot operating in large-sized
trees, therefore minimizing risk for the humans
involved in the collection.
Gathering of Insect Specimens: usually, for
collecting insects in higher levels, nets spread
around the tree and a source of smoke below it are
used. The great discussion about this technique is
that one not only captures the desired insects, but
one ends up killing most of the insects that inhabit
that tree as well. Thus, one proposes to use a trap,
positioned in the robot, containing a pheromone or
equivalent substance as bait, specific for the insect
species one wants to capture. One can even adapt
cameras and sensors in the trap to gather images of
the moment of capture. With a trap thus
implemented, one reduces the negative
environmental impact of the capture. Another
relevant issue would be the possibility that the robot
moves along the day to capture varied insect
specimens at different heights in different hours, to
check for variations in insect populations according
to the height, and the hour of the day.
Climatic studies: climatic or microclimatic studies
refer to works on microenvironments in native
vegetation and/or reforested areas. It is important to
study the different energy flows:
horizontal and
vertical. The vertical directly reflects the results of
solar radiation, which decisively influences the
horizontal energy flows: air masses, hot and cold
fronts, action centers. Solar radiation determines the
whole system, and may be analized according to its
elements: temperature, pressure, and humidity,
greatly influencing biogeographic characteristics,
geomorphologic and hydrologic phenomena etc.
Thus, the robot can be equipped with sensors for
such measures, to collect data on the desired
elements.
Studies on biosphere/atmosphere interaction:
biosphere environments are the group of biotic or
abiotic factors that interfere in the life conditions on
a certain region of the biosphere. In the case of
forests the aerial environment is studied, and the
most important elements to consider are: light,
oxygen, ice formation, winds, humidity and carbon
gas. In order to register all this information, the
robot can be endowed with specific sensors for each
kind of required measure, to collect data regarding
the elements at hand, and to provide information on
them regarding both height and time variations.
Studies on arboreal fauna: fauna studies are
hampered by the existence of many leaves, or very
dense treetops, as the lack of existing natural light
hinders the observation of the species. Other usually
relevant points are the difficulty to obtain a proper
angle due to the great heights involved, and the very
presence of human beings in that specific
environment, easily detected by their movements,
noise and odors. For this type of task, the robot can
be fitted with cameras to capture both static and
dynamic images. These can then be stored locally in
some type of memory card, or transmitted via
communication interface to a base station.
Sensors Network: robots carrying a group of
sensors and fitted with a communication interface,
for instance Wi-fi or other similar technology can be
dispersed in the forest to capture data regarding the
ecological behavior in the area at hand.
Measurements such as the ones already mentioned in
climatic studies and biosphere/atmosphere
interaction can be shared among robots or even
retransmitted among robots to reach the base station,
without the need for the researcher to “pay visits” to
the reading points.
2 GOAL AND PURPOSE
Thus, considering this poorly explored area, one
proposes the Kamanbaré robotics platform.
Kamanbaré is a biomimetic robot, i.e., inspired in
nature, with the purpose of climbing trees for
environmental research applications. The proposed
work represents a progress in robot applications,
both for the fact of environmental research
applications, and for its tree-climbing ability, with
computer-controlled devices configured to be used
as paws.
The project’s main application is climbing trees
for non-invasive search purposes, reaching points (at
high altitudes) that may offer risk to humans.
The development was driven mainly to seek for
robot stability and efficiency regarding the paws.
The adopted line of research is an implementation
inspired in nature. One must stress here that the
system doesn't mimic nature, by copying an animal
or insect to accomplish the desired work, but rather,
a robot development project that combines the
climbers' best characteristics (insects and lizards)
considering the available technologies and the
associated cost/benefit ratio, in other words, some
parts were inspired in certain solutions found in
nature, while other parts were inspired in different
elements.
KAMANBARÉ - A Tree-climbing Biomimetic Robotic Platform for Environmental Research
479

Ensemble stability, contact stability (paws),
contact position, and contact force (pressure) were
defined and used to implement the strategies and
techniques for dynamic and static control of the
system.
3 BIOLOGICAL INSPIRATION:
THE CHAMELEON
Differently from any other reptile or lizard,
chameleons have paws that were created, or adapted,
to adequately clasp the different types of branches or
shrubs existing in its environment.
The chameleon paws evolved to provide them
with the best possible maneuvering and grip
capabilities on trees. The paws are actually forked,
with three fingers on one side and two on the other.
Frequently they also have powerful and sharp nails
(or claws) that can grip the surface which they hold
on to. This unique arrangement allows them to
position their paws completely around the branches
or shrubs on which they move around, giving them
an amazingly strong clasping capability.
Chameleon paws have five fingers each, divided
in two groups (internal and external), one side
composed of three fingers while the other side has
two, as seen in Figure 1. Front paws have two
fingers pointing to the external side, and three
towards the inner side, while rear paws are
configured in an opposite arrangement, i.e., two
inside fingers and three outside fingers. This
provides the chameleon with the same number of
fingers on each side of the branch, considering all
the paws, allowing a balanced and stable clasping.
Figure 1: Details of the chameleon paw, presenting the
bifurcation and configuration of the fingers.
4 GEOMETRY OF THE
MECHANICAL MODEL
The mechanical structure of the Kamanbaré platform
consists of a central rigid body with four legs,
identical and symmetrically distributed. Each leg
comprises three links connected by two rotating
joints, and is connected to the central body by a third
rotating joint, while each joint has 1 DOF (degrees
of freedom). Identical motor and reduction groups
make the rotary movements. Figure 2 shows the
kinematic configuration of a leg. Each leg also has a
paw, which is forked just as the chameleons,
however with only two fingers, one on each side, for
simplification purposes. The paw connects to the leg
by a rotating joint, and also has another motor and
reduction group that provides for its opening and
closing movements.
Potentiometers and microswitches were inserted
in the joints to supply the signal corresponding to the
opening and closing angle, or position, for the links.
In the paws, more precisely in their plant, a
microswitch was also added to supply the contact
signal with the surface of the object to be climbed
during the movements of the legs.
As each leg has four joints, this means 4 DOF.
Considering the four legs, the platform will have a
total of 16 DOF. Therefore, sixteen motor and
reduction groups were necessary to produce the
global movements.
The prototype of the Kamanbaré platform
presented in this work was developed considering
certain capabilities (abilities), such as: locomotion in
irregular environments (unpredictability of the
branch complexity that compose a tree),
surmounting obstacles (nodes and small twigs), tree
climbing and descent without risking stability, and
keeping low structural weight (mechanics +
electronics + batteries).
Platform development began by considering the
mechanical requirements (structures, materials,
implementation complexity, costs etc.) in parallel
with the electronic requirements (hardware and
software tools, development time, knowledge of the
tools, components availability, costs etc.).
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
480

Figure 2: Kinematic configuration of a leg.
The main dimensions of the platform are: length
of 250 mm, and width varying between 260 and 740
mm, depending on the positioning of the legs. Its
height also depends on the posture and positioning
of the legs, and can vary between 190 and 310 mm.
This configuration, with all the parts
implemented in aluminum, comprises an
approximate total weight of 0.6 kg, not including the
batteries. The geometric model obtained can be seen
in Figure 3. This model was used to generate the
basic locomotion behavior.
Figure 3: Mechanical structure of the Kamanbaré
platform.
5 BASE STATION
ARCHITECTURE
The Base Station provides mission control functions,
sending and receiving data to/from the Kamanbaré
platform via a communication interface such as Wi-
fi.
The station also provides mission start and end
parameters, as well as commands for moving the
robot.
A graphic interface was implemented for a better
display of the data received from the platform,
including a window for image reception, when
appropriate.
Data and command inputs are enabled via
keyboard or, for the robot's control, through a
joystick.
The possibility of using speech recognition
commands was also considered. As the platform has
a motherboard with enough processing capacity and
a Linux operating system, a speech recognition
module can be integrated and commands sent
directly, without the Base Station, via microphone
with a Bluetooth-type serial interface.
6 KAMANBARÉ PLATFORM
ARCHITECTURE
An architecture was implemented for local control of
the Kamanbaré platform. This architecture
corresponds to the robot's functional organization.
Based on the hardware architecture to be
presented in the following section, the development
of the following systems was accomplished
according to Figure 4. This model is based on the
architecture implemented for the MARIUS robot
(PASCOAL et al., 1997).
Figure 4: Kamanbaré Architecture.
KAMANBARÉ - A Tree-climbing Biomimetic Robotic Platform for Environmental Research
481

Support system: this system controls energy
distribution to the platform’s electronic and
electromechanic hardware, and monitors energy
consumption as well. This system is also responsible
for the startup of other subsystems and, during
operation, for detecting hardware failures, and for
starting and controlling the emergency modes.
Actuators control system: this system is
responsible for controlling the motors, and also for
controlling the movements of the legs. Information
on legs positioning is received from the general
control system. Data regarding joint positions, as
well as the values of the electric currents involved,
are sent to the general control system.
General control system: this system receives
trajectory reference information from the mission
control system. It controls all the robot's movements,
sending the necessary commands to the actuators
control system. Problems occurring in the path, such
as obstacles and absence of support points for the
paws, are handled in this system.
Mission control system: this system is the main
module, the highest hierarchical level of the
platform. It is responsible for receiving commands
via the communications system, and for distributing
them to the systems involved. It also stores
information on the general status of the platform
(battery voltage, position of the legs, angles etc.)
keeping them available in case the Base Station
(described in the following topics) requests them.
This system gathers information from the
Environmental inspection system to be subsequently
forwarded to the Base Station.
Communication system: this system is the module
responsible for the communication interfaces
existing in the platform, managing communications
via Wi-fi and Bluetooth, and exchanging data with
the Mission control system.
Environmental inspection system: this system is
responsible for gathering data from the installed
sensors, and for controlling any additional hardware
necessary for that purpose as well. Every data
acquired are sent to the Mission control system.
7 ELECTRONIC
ARCHITECTURE
Considering the implementation of control
algorithms, processing information from sensors, the
necessary calculations for control and locomotion
strategies, interfacing and communication with the
base station, added to the need of real time control
with position and force feedback, the involvement of
high computing complexity was ascertained, thus
requiring a processor of advanced architecture.
Eventually, it was selected then a development
kit containing a processor based on the ARM9 core,
and the deployment of a Linux operating system.
Other motor control boards were also developed
using a Texas Instruments microcontroller of the
MSP430 family and specific integrated circuits to
implement the power actuation section, based on the
so-called H-bridge technique.
To implement the control systems for the
Kamanbaré platform, an electronic architecture was
defined. Initially considering only one joint, it can
be represented in Figure 5, where the main
components are seen: a DC motor, a potentiometer
and a microswitch.
Figure 5: Representation of a joint.
Thus, for control purposes, the need of a PWM
output (motor control), an analog input
(potentiometer reading, indicating the joint angle),
and a digital input (reading the end, or beginning, of
the joint course) was ascertained.
As already mentioned, the platform has 16 DOF,
corresponding to the need of sixteen copies of the
joint control system described above.
As the robot has four legs, one opted for
distributing the control individually to each one of
them. Thus, each leg control module needs four
groups as mentioned, namely, three for the joints,
and one for controlling the opening and closing of
the claw.
One then developed a motor control board for
this specific purpose, Figure 6, based on the
MSP430F149 Texas Instruments microcontroller,
and the L298 integrated circuit (H-bridge). The
board dimensions are: 60 x 50 mm.
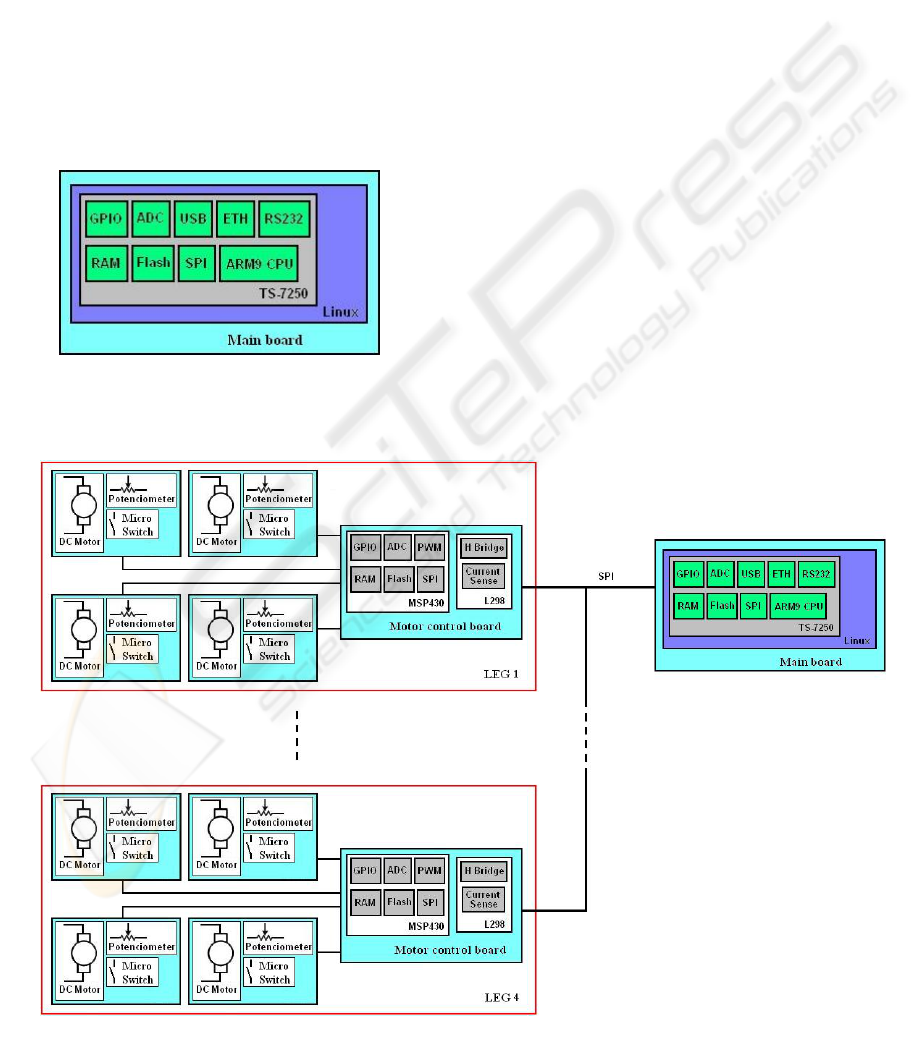
Figure 6: Motor control board diagram.
Due to the control complexity existing in a
robotics platform, it was necessary to adopt a main
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
482
board where the highest hierarchical level control
activities were executed.
As a solution for the main board, the model
selected was the TS-7250 by Technologic Systems.
It was selected because it’s compact, contains
different standard interfaces, and is based on the
EP9302 Cirrus Logic processor, with an ARM9
core, Figure 7. The EP9302 implements an advanced
processor core: 200 MHz ARM920T with support
for a memory management unit (MMU). This
ensemble allows the use of a high-level operating
system, in this case Linux. The ARM920T core has
a 32-bit architecture with a 5-stage pipeline, offering
high performance and low energy consumption
levels. With a 200 MHz clock, the TS-7250 module
offers a performance approximately twice as fast as
other boards based on 586-core processors.
Figure 7: Main board diagram.
Thus, the general electronic architecture for the
Kamanbaré platform was deployed according to the
diagram in Figure 8.
8 IMPLEMENTATION
The control structure described in the previous
section was implemented for the Kamanbaré
platform. The robot has contact and force sensors in
each joint (actually, in the case of the force sensor,
the electric current of the corresponding motor will
be used for this purpose), contact sensors in the
paws, tilt sensor, sensors to measure the distance or
proximity of the body from the surface, and possibly
an accelerometer, intended to measure the
displacement speed, and also to identify a potential
fall.
C language was used for the development of all
software, mainly for reasons of code execution
speed, and easiness of portability in case some other
control board is needed.
A concerning point is the contact detection via
force sensors in the joints. The issue here is that
these virtual sensors only present readings when the
motors are in motion. Thus, whenever a reading is
necessary, a movement must be initiated.
Regarding the movement generation module, it
was initially implemented only the simplest way,
i.e., the robot follows a straight path at the highest
Figure 8: Electronic architecture of the Kamanbaré platform.
KAMANBARÉ - A Tree-climbing Biomimetic Robotic Platform for Environmental Research
483

speed allowed by the surface (no waiting time will
be introduced, besides those produced by the legs
when searching for support points).
Steering and speed commands are provided via
base station and, in the future, via speech commands
over a microphone with Bluetooth technology.
9 CONCLUSION
This work presented the Kamanbaré robot, which is
a four-legged bionspired platform with the main
purpose of climbing trees, for environmental
research applications. The mechanical and
electronics structure, and the software architecture,
were presented.
REFERENCES
Abderrahim, M., Balaguer, C., Giménez, A., Pastor, J. M.,
Padrón, V. M., 1999. ROMA: A Climbing Robot for
Inspection Operations. Proceedings of the IEEE
International Conference on Robotics and Automation,
Volume 3, 10-15, Detroit, USA.
Armada, M., Santos, P. G. de, Nieto, J., Araujo, D. On the
design and control of a self-propelling robot for
hazardous environments. 1990. In Proc. 21st Int.
Symposium on Industrial Robots, IFS, pp. 159–166.
Armada, M., Santos, P. G. de, Jiménez, M. A., Prieto, M.
2003. Application of CLAWAR Machines. The
International Journal of Robotics Research. Vol. 22, nº
3–4, pp. 251-264.
Armada, M., Prieto, M., Akinfiev, T., Fernández, R.,
González, P., Garcia, E., Montes, H., Nabulsi, S.,
Ponticelli, R., Sarria, J., Estremera, J., Ros, S., Grieco,
J., Fernandez, G. 2005. On the Design and
Development of Climbing and Walking Robots for the
Maritime Industries. Journal of Maritime Research,
Vol. II. nº 1, pp. 9-32.
Galvez, J. A., Santos, P. G. de, Pfeiffer, F. 2001. Intrinsic
Tactile Sensing for the Optimization of Force Distribution
in a Pipe Crawling Robot. IEEE/ASME Transactions
on Mechatronics, Vol. 6, nº 1.
Pascoal, A., Oliveira, P., Silvestre, C., Bjerrum, A., Ishloy,
A., Pignon, J. P., Ayela, G., Petzelt, C. 1997. MARIUS: An
Autonomous Underwater Vehicle for Coastal
Oceanography. IEEE Robotics & Automation
Magazine. pp. 46-57.
Santos, P. G. de, Armada, M., Jiménez, M. A. 1997. An
industrial walking machine for naval construction. In
IEEE Int. Conf. on Robotics and Automation,
Albuquerque, NM.
Santos, P. G. de, Armada, M., Jiménez, M. A. 1997.
Walking machines. Initial testbeds, first industrial
applications and new research. Computing and
Control Engineering Journal, pp. 233-237.
Santos, P. G. de, Armada, M., Jiménez, M. A. 2000. Ship
building with ROWER. IEEE Robotics and Automation
Magazine 7(4):35–43.
Virk, G. S. 2005. The CLAWAR Project: Developments in
The Oldest Robotics Thematic Network. IEEE Robotics &
Automation Magazine, pp. 14-20.
White, T. S., Hewer, N., Luk, B. L., Hazel, J. 1998. The
Design and Operational Performance of a Climbing Robot
Used for Weld Inspection in Hazardous Environments.
Proceedings of IEEE International Conference on
Control Applications, Trieste, Italy.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
484
