
BEHAVIOR ANALYSIS OF PASSENGER’S POSTURE AND
EVALUATION OF COMFORT CONCERNING
OMNI-DIRECTIONAL DRIVING OF WHEELCHAIR
Yuta Sato, Yoshiyuki Noda, Takanori Miyoshi and Kazuhiko Terashima
Department of Production Systems Engineering, Toyohashi University of Technology
Hibarigaoka 1-1, Tempaku, Toyohashi, 441-8580, Japan
Keywords:
Wheelchair, Omni-directional drive, Passenger’s posture behavior, Comfort sensation, Acceleration sensor.
Abstract:
The purpose of this study is to analyze the relationship between passenger’s posture behavior and comfort
while riding omni-directional wheelchair. First, an algorithm to transform the obtained data in the sensor
coordinates using acceleration sensor into the vehicle coordinates by means of proposed correction algorithm.
Its effectiveness is demonstrated by experiments. Second, analysis on the relationship between acceleration
of wheelchair movement, passenger’s posture behavior and comfort sensation in the riding motion to forward,
backward and lateral direction is studied. Posture behavior of passenger’s head and chest is measured by
acceleration sensors, and comfort sensation of passenger is evaluated by applying the Semantic Differential
(SD) method and a Paired Comparison Test. Finally, through a lot of experiment, influence factors concerning
comfort while riding to wheelchair are discussed.
1 INTRODUCTION
In today’s aged society, a wheelchair is the most com-
mon vehicle to assist elderly and handicapped people.
Wheelchairs can provide many profits to users, such
as extending mobility, broadening community and so-
cial activities, and enhancing quality of life (QOL)
of the users. Therefore, the user of electric powered
wheelchair generally increases, and the development
of wheelchair which is able to drive comfortably is
highly required.
Various factors are largely related to the riding
comfort of electric powered wheelchairs, such as seat
comfort, ambient noise, and stability. The passenger’s
posture swing of body and the driving acceleration
and deceleration are generally the main factors which
influence on comfort.
In the international standard of ISO-2631-1, the
riding comfort of a transportation vehicle is evaluated
by the magnitude of the acceleration weighted by os-
cillation frequency (ISO-2631-1, 1997). Train’s driv-
ing was often evaluated by this standard method and
improved by suppressing the acceleration of uncom-
fortable frequency (C.H.Lee et al., 2005).
Passenger’s comfort while riding wheelchair is
also improved by suppressing the vibration with dis-
comfort frequencies. Maeda described a wheelchair
with passenger has three resonant frequencies; the
first resonant frequency is 5∼7[Hz], the second is
8[Hz], and third is 13∼15[Hz]. And he addressed
that the main point for improving a wheelchair pas-
senger’s comfort was to reduce the seat vibration of
wheelchair at around 8[Hz] (S.Maeda et al., 2003).
The result described above is concerned with the
vibration while driving over long time. On the other
hand, a wheelchair is not the only steady-state op-
eration, but also the transient state such as starting
and stopping. Additionally, the high drive acceler-
ation or deceleration causes passenger’s discomfort.
Yamagishi improved comfort while riding a car by
reduction of acceleration and jerk (derivative of ac-
celeration) (Y.Yamagishi and H.Inooka, 2005). How-
ever, up to the present, passenger’s posture behavior
of body which causes discomfort during riding has
not been studied to own knowledge.
In the author’s laboratory, comfort driving for
wheelchair has been one of the main research sub-
jects. Omni-directional Wheelchair (OMW) which
can drive towards omni-direction is developed, and
has a power assist system for helping fragile or el-
derly attendants (K.Terashima et al., 2006).
Passenger’s comfort has been improved by sup-
243
Sato Y., Noda Y., Miyoshi T. and Terashima K. (2007).
BEHAVIOR ANALYSIS OF PASSENGER’S POSTURE AND EVALUATION OF COMFORT CONCERNING OMNI-DIRECTIONAL DRIVING OF
WHEELCHAIR.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 243-251
DOI: 10.5220/0001651202430251
Copyright
c
SciTePress

pressing the both of OMW and organ’s vibration of
passengers. Passenger’s vibration can be estimated
by the proposed two-dimensional passenger model.
To suppress its vibration, the control system with two
notch filters has been given. According to the simu-
lation results, passenger’s vibration is suppressed al-
most completely by the proposed controller in the
case of forward and backward (H.Kitagawa et al.,
2002), (J.Urbano et al., 2005). However, in the case
of omni-direction such as lateral movements, it is only
verified by simulation, not experiments. Therefore, it
must be verified by experiments with measuring pas-
senger’s vibration. If lateral motion gives large dis-
comfort, OMW is not appropriate as wheelchair for
human being. It is necessary to investigate the pos-
ture behavior and comfort for the movements to any
direction, whether or not OMW can be applied as a
vehicle to carry people.
In most study about comfort driving, passenger’s
body posture is moved. However, passenger’s posture
behaviors while riding the wheelchair are not mea-
sured explicitly in actual experiments. The authors
predict that passenger’s behavior while riding is fairly
related with the passenger’s discomfort sensation.
The purpose of this study is therefore to analyze
the relationship between passenger’s posture behav-
ior and comfort while driving to the omni-direction.
First, an algorithm to transform the obtained data
in the sensor coordinates using acceleration sensor
into the vehicle coordinates by the correction algo-
rithm. Its effectiveness is demonstrated by exper-
iments. Second, analysis on the relationship be-
tween acceleration of wheelchair movement, passen-
ger’s posture behavior and comfort sensation in the
riding motion to the forward, backward and lateral
direction is studied. Passenger’s posture behavior is
measured by acceleration sensors fixed at head and
chest. Comfort sensation of passenger is evaluated
by applying the Semantic Differential (SD) method.
Thirdly, experimental analysis on the chest movement
with comfort is done. Passenger’s sensation is evalu-
ated by a Paired Comparison Test.
Finally, through a lot of experiment, influence fac-
tors concerning comfort while riding to wheelchair
are discussed.
2 EXPERIMENTAL SETUP
2.1 Experimental Wheelchair
To clearly analyze the relation between passenger’s
body behavior and comfort sensation while riding the
wheelchair, high performance wheelchair ”Emu-S”
(Wakogiken Co., Ltd.) which can drive with high ve-
locity and acceleration as shown in Figure 1 is used in
experiments.
Figure 1: Wheelchair used in experiments.
This wheelchair was introduced for another’s
study, and also used for observing passenger’s move-
ment (S.Shimada et al., 2002). To observe the passen-
ger’s body behavior for omni-directional movement,
wheelchair seat is set with 90 [deg] rotations as shown
in Figure 2.
Figure 2: Seat allocation of a wheelchair in the case of ob-
serving a lateral motion.
Table 1 is a specification of this wheelchair. It
has been made for a wheelchair football needed to
move fast, and therefore it can drive with high ve-
locity and high acceleration. The max velocity and
acceleration are respectively 2.7[m/s] and 3.5[m/s
2
].
This wheelchair’s specification is enough from the
viewpoint of practical wheelchair’s use. However,
it can largely induce passenger’s posture movements
and discomfort sensation while riding the wheelchair,
and thus it is used to analyze in this experiments.
This wheelchair is driven by the reference signal
of analog voltage -5 to +5[V]. And DSP is loaded for
motor servo control and digital signal processing of
brushless resolver signal.
2.2 Measurement of Passenger’s
Behavior
Acceleration sensor of ACA302 (Star Micronics Co.,
Ltd.) is used for measuring the passenger’s behavior.
This sensor can detect three-axes acceleration of X, Y
and Z-axis, and the range of detection is ±19.6[m/s
2
].
Acceleration sensors are put at the passenger’s head,
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
244

Table 1: Specification of wheelchair.
Size 800×630×900 [mm]
Weight 88 [kg]
Motor AC Servo motor 232 [W] ×2
Rated torque 1.18 [N·m]
Max torque 4.5 [N·m]
Rated rotation 1880 [rpm]
Max rotation 3000 [rpm]
Location detect Brushless resolver
chest and the wheelchair as shown in Figure 3 and
Figure 4. Sensor signals can be amplified by circuit,
because the signal voltage is very small ([mV] order).
Acceleration data is obtained from AD board at the
sampling times of 10[ms]. Reference of analog volt-
age for driving the wheelchair is provided from DA
board.
Passenger
Wheelchair
Acceleration
sensor
AD Board
Amplifier
circuit
PC
Drive
reference
Sensor
signal
DA Board
Figure 3: System for measuring passenger’s behavior.
Head
sensor
Chest
sensor
Figure 4: Acceleration sensor for measuring the motion of
head and chest’s point.
3 DATA CORRECTION OF
ACCELERATION SENSOR
3.1 Correction Algorithm
It seems extremely difficult in the usual experiments
that acceleration sensors must be horizontally placed
at the exact accuracy. Therefore, the acceleration data
obtained in the sensor coordinates by experiments
should be converted in the drive coordinates by a cor-
rection algorithm. Acceleration sensor coordinates
are x, y and z, and drive coordinates are u, v and w as
shown in Figure 5. This study deals the drive toward
one direction of forward, backward, rightward or left-
ward at once, and then the corrected acceleration must
be appeared only in the drive direction acceleration of
u-axis by the proposed algorithm.
With the proposed correction algorithm, accelera-
tion sensor can be placed at any point of passenger’s
body part without considering sensor mount angle.
First, sensor coordinates are rotated through an
angle φ around x-axis. Next, its coordinates are ro-
tated through an angle θ around y-axis. With these
rotation, z-axis is matched with w-axis. The coordi-
nates after rotation are x
′
, y
′
and z
′
as shown in Figure
6. Accelerations after the rotation represented as a
x
′
,
a
y
′
and a
z
′
, are calculated by Eq.(1), where a
x
, a
y
and
a
z
are the accelerations before the rotation. Notation
of S and C denotes sinusoidal and cosine function re-
spectively.
u
w
v
(Drive direction)
x
z
y
xyz
Σ
Σ
uvw
: Sensor coordinates
: Drive coordinates
Acceleration sensor
Figure 5: Sensor and drive coordinates.
a
x
′
a
y
′
a
z
′
=
Cθ SθSφ −SθCφ
0 Cφ Sφ
Sθ −CθSφ CθCφ
a
x
a
y
a
z
(1)
u
v
x'
z'
,w
y'
Acceleration sensor
Figure 6: Coordinates after rotation through angles φ and θ.
The values of a
x
′
, a
y
′
and a
z
′
at initial state are
described by Eq.(2). Acceleration is appeared only in
z
′
axis, and gravity acceleration is g =9.8[m/s
2
].
a
x
′
a
y
′
a
z
′
=
0
0
g
(2)
BEHAVIOR ANALYSIS OF PASSENGER’S POSTURE AND EVALUATION OF COMFORT CONCERNING
OMNI-DIRECTIONAL DRIVING OF WHEELCHAIR
245
By using the second row equation on Eq.(1), φ is
calculated as Eq.(3), where ¯a
y
and ¯a
z
are the average
of a
y
and a
z
at initial state, respectively.
φ = tan
−1
−
¯a
y
¯a
z
(3)
Then, θ is given in Eq.(4). φ is obtained by previ-
ous calculation, and ¯a
x
, ¯a
y
and ¯a
z
are the average of
acceleration at initial state.
¯a
x
cosθ+ ¯a
y
sinθsinφ− ¯a
z
sinθcosφ = 0 (4)
At the last, sensor coordinates are rotated through
an angle ψ around z
′
axis. With this rotation, x
′
axis is
matched with a drive direction of u axis. The relation
between(a
u
,a
v
,a
w
) and (a
x
′
,a
y
′
,a
z
′
) is expressed by the
following equation.
a
u
a
v
a
w
=
Cψ Sψ 0
−Sψ Cψ 0
0 0 1
a
x
′
a
y
′
a
z
′
(5)
The rotation angle ψ can be defined as Eq.(6).
The passenger and wheelchair are transferred towards
one direction of forward, backward or lateral at once.
Then, the acceleration a
v
of v axis expressed by
Eq.(7) which is the direction perpendicular to u-axis,
is small. Therefore, ψ is chosen so as to minimize the
following cost function J.
J = min
ψ
T
0
a
v
(ψ, t)
2
dt (6)
a
v
(ψ, t) = −a
x
′
(t)sinψ+ a
y
′
(t)cosψ (7)
In off-line process, three rotation angles of φ, θ
and ψ can be estimated automatically, and made the
sensor coordinates transformed in order to correct the
installation error.
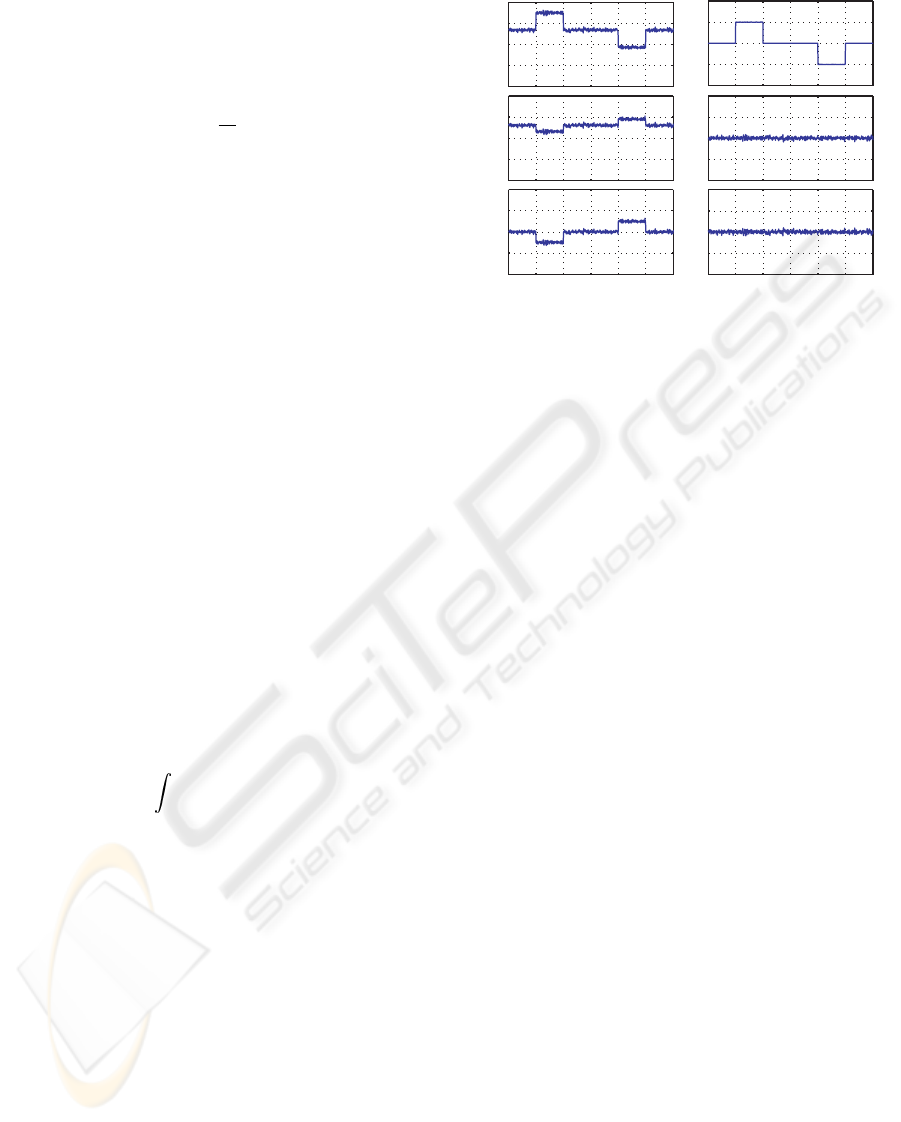
3.2 Verification of Proposed Algorithm
Figure 7 indicates that acceleration sensor signals of
a
x
, a
y
and a
z
are converted to the data signal of a
u
, a
v
and a
w
, and the corrected data has only in the drive di-
rection of u-axis by the proposed algorithm described
in the previous section. Through these results, the
proposed algorithm can provide the exact value of ac-
celeration using acceleration sensor.
-2
0
2
4
6
x
2
4
6
8
10
12
-4
-2
0
2
4
-4
-2
0
2
4
-4
-2
0
2
4
0 1 2 3 4 5 6
-4
-2
0
2
4
Time [s]
0 1 2 3 4 5 6
Time [s]
Sensor data
Corrected value of sensor data
Acceleration [m/s ]
a
y
a
z
a
u
a
v
a
w
a
Figure 7: Result of the corrected values of sensor data by
the proposed algorithm.
4 RELATIONSHIP BETWEEN
PASSENGER’S POSTURE
BEHAVIOR AND COMFORT
4.1 Passenger’s Posture Behavior and
Comfort in Omni-directional Drive
In order to discuss the relationship between passen-
ger’s posture behavior of body and comfort feeling, a
lot of experiments are executed as follows.
4.1.1 Experimental Description
At experiments, the wheelchair is driven by three
patterns with various acceleration of 0.5, 1.0 and
2.0[m/s
2
]. These patterns are the trapezoidal velocity
one with maximum velocity of 1[m/s] and movement
distance of 2[m]. And it is respectively driven to-
wards four-direction of forward, backward, rightward
and leftward. The group of healthy and standard pro-
portions comprised of 6 people (average: 170[cm],
60[kg]) is tested. All of them have never ridden on
this wheelchair before.
Furthermore, the wheelchair is driven particularly
in patterns with various acceleration of 1.0, 1.3, 1.7,
2.0 [m/s
2
] with the same maximum velocity of 1[m/s]
and distance of 2[m]. Drive directions are forward
direction where 3 passengers are tested.
The passengers were given the information about
the movement distance and the direction in experi-
ments before start, and given a start sign when the
wheelchair’s movement starts. SD method is used for
the investigation of passenger’s comfort.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
246

4.1.2 Experiment in Forward-backward
Direction Drive
Passenger’s posture acceleration of u-axis for the for-
ward drive experiment with acceleration of 2[m/s
2
] is
shown in Figure 8. Numbers in the above side of Fig-
ure 8 corresponds to the passenger’s posture shown in
the bottom side.
0 1 2 3 4 5 6
-6
0
6
Chest
Time [s]
Wheelchair
Chest
-6
0
6
Head
Wheelchair
Head
1 2 3
4
5
1
2
3
4
5
Acceleration of head and chest [m/s ]
2
Figure 8: Acceleration of head and chest in the case of for-
ward transfer with acceleration of 2.0 [m/s
2
].
The head and chest acceleration can be obtained
by subtracting the acceleration of the wheelchair from
the measured acceleration of the head and chest.
When the forward transfer is started, a head moves
in the opposite direction and a chest doesn’t move due
to the backrest as shown at the number 2 of Figure 8.
During constant velocity drive, the head movement
is suppressed by passenger’s adjustment in number
3. The deceleration triggered a head swing. Then, a
chest swing also appears, because there is not barrier
of preventing a chest movement like the backrest in
number 4. When a deceleration time is ended, the pas-
senger intentionally suppresses the body movement,
and there is no residual vibration at the end of driving
in number 5.
The passenger’s behavior in forward transfer of
0.5 and 1.0 [m/s
2
] is shown in Figure 9. The head
acceleration becomes bigger with increasing the drive
acceleration. The average values of 6 passenger’s
maximum head acceleration in the driving accelera-
tion of 0.5, 1.0 and 2.0 [m/s
2
] are respectively 1.95
(standard variation σ=0.57), 2.84 (σ=0.96) and 6.64
(σ=1.41) [m/s
2
]. The distinguished movement of
chest doesn’t appear at starting and stopping time in
driving of 0.5 and 1.0 [m/s
2
]. It seems that the chest
movements appear between the drive acceleration of
1.0 and 2.0 [m/s
2
].
During the backward drive, the passenger behaves
in the same way as shown in Figure 10. The ampli-
tude of head swing is similar to that of forward drive.
0 1 2 3
4
5 6
Time [s]
0
1
2 3
4
5
6
Time [s]
6
-6
0
6
-6
0
Wheelchair
Chest
Wheelchair
Head
2
0.5 [m/s ]
2
1.0 [m/s ]
Acceleration of head and chest [m/s ]
2
Figure 9: Acceleration of head and chest in the forward
transfer of 0.5 and 1.0 [m/s
2
].
The average of 6 passenger’s maximum head accel-
erations in driving with 0.5, 1.0 and 2.0 [m/s
2
] are
respectively 2.29 (σ=0.59), 3.35 (σ=0.05) and 6.11
(σ=1.39) [m/s
2
]. However, the chest swing is not ap-
peared in the deceleration interval, and the swing is
appeared in the acceleration interval, because of the
backrest. The wheelchair’s acceleration is opposite to
that of forward, because the wheelchair is driven to-
ward the reverse direction.
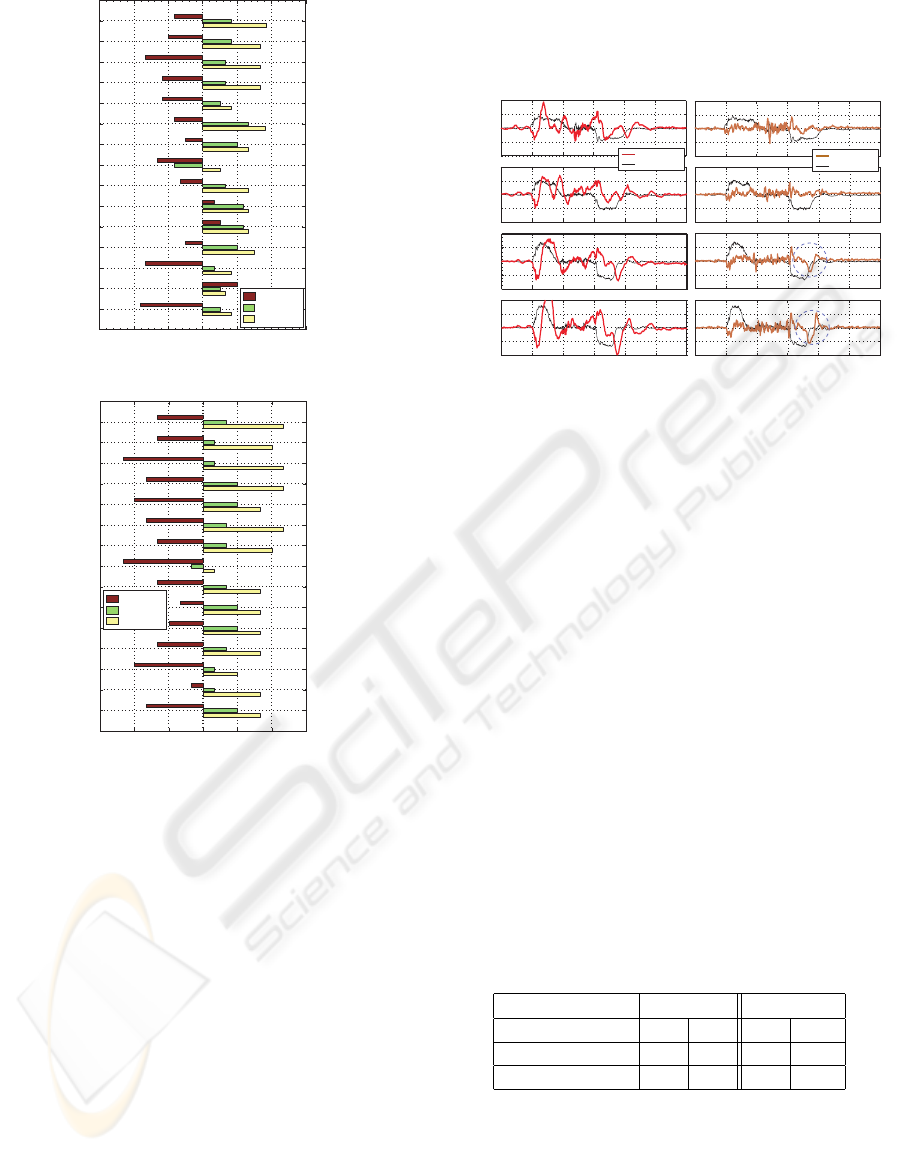
Questionnaires using SD method with forward
and backward driving is shown in Figure 11 and 12
respectively. The right side in figure is a positive
side, and left side is a negative side for all items
of assessment. These results are total assessments
about 6 passengers. Assessment of all items such as
”Good Ride or Bad Ride”, ”Comfortable or Uncom-
fortable”, ”No-Swing or Swing”, ”Defensive or Ag-
gressive” and ”Bland or Pungent” are the significant
difference with changing the drive acceleration by the
analysis of variance was detected. Through this re-
sult, it is determined that the passenger’s assessment
becomes worse while increasing the drive accelera-
tion during forward-backward direction drive.
-6
0
6
Time [s]
0 1 2 3 4 5 6
0
6
Wheelchair
Chest
Wheelchair
Head
-6
Chest
Head
Acceleration of head and chest [m/s ]
2
Figure 10: Acceleration of head and chest in the backward
transfer of 2.0 [m/s
2
].
4.1.3 Experiment in Lateral Direction Drive
Passenger’s behavior in the rightward drive is shown
in Figure 13 and Figure 14. When the wheelchair
drives toward the right direction, the passenger’s be-
havior is almost the same as that of forward or back-
BEHAVIOR ANALYSIS OF PASSENGER’S POSTURE AND EVALUATION OF COMFORT CONCERNING
OMNI-DIRECTIONAL DRIVING OF WHEELCHAIR
247

-18 -12 -6 0 6 12 18
Bad Ride
Uncomfortable
Swing
Unreliable
Agressive
Changeable
Bad Feeling
Fast
Exciting
Painful
Terrified
Weak
Complex
Pungent
Good Ride
Comfortable
No-Swing
Reliable
Defensive
Stable
Good Feeling
Slow
Calm
Pleasurable
Interesting
Tireless
Strong
Simple
Bland
2.0[m/s ]
2
1.0[m/s ]
2
0.5[m/s ]
2
Tired
Figure 11: SD questionnaire result in the forward transfer.
-18 -12 -6 0 6 12 18
Bad Ride
Uncomfortable
Swing
Unreliable
Agressive
Changeable
Bad Feeling
Fast
Exciting
Painful
Terrified
Weak
Complex
Pungent
Good Ride
Comfortable
No-Swing
Reliable
Defensive
Stable
Good Feeling
Slow
Calm
Pleasurable
Interesting
Tireless
Strong
Simple
Bland
Tired
2.0[m/s ]
2
1.0[m/s ]
2
0.5[m/s ]
2
Figure 12: SD questionnaire result in the backward transfer.
ward drive. However, the head swing amplitude is
bigger than that of forward drive. The average of
maximum acceleration in 0.5, 1.0 and 2.0 [m/s
2
]
are respectively 4.4 (σ=1.18), 4.52 (σ=0.87) and 6.8
(σ=1.02) [m/s
2
]. The distinguished chest swing only
appears in driving of 2.0 [m/s
2
] at the stopping and
starting, and its amplitude is as the same level as the
forward drive.
In the driving toward the left direction, the pas-
senger behaves is similar to that of rightward drive as
shown in Figure 15. The average of maximum accel-
eration in 0.5, 1.0 and 2.0 [m/s
2
] are respectively 2.59
(σ=0.56), 3.59 (σ=0.37) and 7.85 (σ=1.46) [m/s
2
].
The chest movements only appears in the driving of
2.0 [m/s
2
].
Questionnaires using SD method in rightward and
leftward driving is shown in Figure 16 and 17 re-
spectively. The results show that the passenger’s as-
sessment becomes worse with increasing the drive
acceleration during lateral direction drive. Further-
-6
0
6
Time [s]
0 1 2 3 4 5 6
-6
0
6
Wheelchair
Chest
Wheelchair
Head
1 2 3
4
5
1
2
3
4
5
Chest
Head
Acceleration of head and chest [m/s ]
2
Figure 13: Acceleration of head and chest in the rightward
transfer of 2.0 [m/s
2
].
0 1 2 3 4 5 6
Time [s]
0 1 2 3 4 5
6
Time [s]
2
0.5 [m/s ]
2
1.0 [m/s ]
6
-6
0
6
-6
0
Acceleration of head and chest [m/s ]
2
Wheelchair
Chest
Wheelchair
Head
Figure 14: Acceleration of head and chest in the rightward
transfer of 0.5 and 1.0 [m/s
2
].
more, the lateral direction movements making the
head swing bigger are more comfortable than the
backward of the forward-backward direction move-
ments. The backward driving is the most uncomfort-
able direction in four one. The leftward and rightward
direction driving which often thought to be uncom-
fortable, are as comfortable as the case of the forward
movements.
-6
0
6
Time [s]
0 1 2 3 4 5 6
0
6
Wheelchair
Chest
Wheelchair
Head
-6
Chest
Head
Acceleration of head and chest [m/s ]
2
Figure 15: Acceleration of head and chest in leftward trans-
fer of 2.0 [m/s
2
].
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
248
-18 -12 -6 0 6 12 18
Bad Ride
Uncomfortable
Swing
Unreliable
Agressive
Changeable
Bad Feeling
Fast
Exciting
Painful
Terrified
Weak
Complex
Pungent
Good Ride
Comfortable
No-Swing
Reliable
Defensive
Stable
Good Feeling
Slow
Calm
Pleasurable
Interesting
Tireless
Strong
Simple
Bland
Tired
2.0[m/s ]
2
1.0[m/s ]
2
0.5[m/s ]
2
Figure 16: SD questionnaire result in the rightward transfer.
-18 -12 -6 0 6 12 18
Bad Ride
Uncomfortable
Swing
Unreliable
Agressive
Changeable
Bad Feeling
Fast
Exciting
Painful
Terrified
Weak
Complex
Pungent
Good Ride
Comfortable
No-Swing
Reliable
Defensive
Stable
Good Feeling
Slow
Calm
Pleasurable
Interesting
Tireless
Strong
Simple
Bland
Tired
2.0[m/s ]
2
1.0[m/s ]
2
0.5[m/s ]
2
Figure 17: SD questionnaire result in the leftward transfer.
4.1.4 Experiment for Detecting Threshold
Acceleration of the Chest Movements
The passenger’s posture behavior at 1.0, 1.3, 1.7 and
2.0 [m/s
2
] in the case of the forward drive are shown
in Figure 18. Head and chest behavior at 1.0 and 1.3
[m/s
2
] is alike as shown in Figure 18. The head move-
ment becomes bigger while increasing the drive ac-
celeration, and that is as the same as the previous ex-
perimental results. The distinguished chest movement
appears in the case of 1.7 and 2.0 [m/s
2
]. Threshold
of the chest movement is estimated to be the value
between 1.3 and 1.7 [m/s
2
]. By the results using SD
method, the passenger’s comfort sensation becomes
worse while increasing the drive acceleration. Then,
the passenger says that they feel discomfort sensation
when the chest is moved. The similar results were
obtained in other passenger’s experiments.
Through these results, it seems that the chest
movements induce the passenger’s uncomfortable,
and uncomfortable feelings can be reduced by con-
trolling of chest movements.
0 1 2 3 4 5 6
Time [s]
0 1 2 3 4 5 6
Time [s]
-4
0
4
-4
0
4
-4
0
4
-4
0
4
Wheelchair
Chest
Wheelchair
Head
2
1.0 [m/s ]
2
1.3 [m/s ]
2
1.7 [m/s ]
2
2.0 [m/s ]
Acceleration of head and chest [m/s ]
2
Figure 18: Acceleration of head and chest in case of forward
transfer using various driving acceleration.
4.2 Comfort Sensation Focused on the
Swing of Chest Part
Through the previous experiments, the passenger’s
comfort may be influenced by the chest movement.
Therefore, the effect of chest movement on the com-
fort is investigated in details.
4.2.1 Experimental Description
In this section by using various patterns of the
wheelchair is moved that acceleration and decelera-
tion as shown in Table 2. The maximum velocity, dis-
tance and other condition are the same with the previ-
ous experiments.
Pattern I has a big deceleration such that induces
the chest movement, because there is no backrest in
the front part as shown in Figure 19. Pattern IV has a
big acceleration such that induces the chest movement
by the same reason. Drives by these two patterns are
thought to be uncomfortable.
Table 2: Driving patterns.
[m/s
2
] Forward Backward
Driving pattern I II III IV
Acceleration 1.0 2.0 1.0 2.0
Deceleration 2.0 1.0 2.0 1.0
In the present experiments, to evaluate discomfort
sensation more clearly, a Paired Comparison Test is
used. After forward drive (or backward drive) two
pattern of I and II (or III and IV), it was asked which
pattern induces you discomfort feeling. 10 people
with healthy and standard proportion were selected as
subjects.
BEHAVIOR ANALYSIS OF PASSENGER’S POSTURE AND EVALUATION OF COMFORT CONCERNING
OMNI-DIRECTIONAL DRIVING OF WHEELCHAIR
249

(a) Driving pattern I
(b) Driving pattern IV
Figure 19: Drive patterns cause the chest swing.
4.2.2 Experimental Result and Discussion
Experimental results are shown in Figure 20. With
respect to the pattern I and IV, the chest movement is
observed at the anticipated point, because there is not
backrest for the direction such that acceleration value
is big. On the other hand, in the case of pattern II and
III, the chest is not largely moved, because backrest
exists for the direction in which the acceleration is
big.
0
1 2 3 4 5 6
Time [s]
0 1 2 3 4 5 6
Time [s]
-4
0
4
-4
0
4
-4
0
4
-4
0
4
Wheelchair
Chest
Wheelchair
Head
Pattern I
Pattern I
Pattern IPattern I
I
IIV
Acceleration of head and chest [m/s ]
2
Figure 20: Acceleration of head and chest in the drive pat-
tern I, II, III and IV.
According to the result of a paired comparison test
as shown in Table 3, the discomfort sensations were
almost same. The swing amplitude of I and IV is al-
most same. Here, that of II and III is almost same,
where, the swing amplitude of I and IV is bigger than
that of II and III. Therefore, the remarkable relation-
ship between passenger’s chest movement and dis-
comfort could not be detected through this experiment
conditions as seen from Table 2. However, comfort
is almost same in each pattern. This may be the in-
fluence of the pressure from the backrest as a main
factor.
Through these experiments, it becomes clearly
that the passenger’s body behavior is one of the factor
Table 3: Number of passenger with discomfort feeling.
(Total number ; N=10)
Forward Backward
Driving pattern I II III IV
Discomfort passenger 4 6 6 4
that affects passenger’s behavior. However, passen-
ger’s comfort is not depending on only passenger’s
behavior, and it is possible that there is another fac-
tor. For example, velocity or distance of wheelchair
driving, and the chest pressure with backrest. These
analyses are the near future problems to be solved.
5 CONCLUSION
The results obtained in this paper were as follows.
1. The transformed value of acceleration into the
movements coordinates of wheelchair at the vari-
ous body parts from the sensor data of sensor co-
ordinates could be calculated by the proposed al-
gorithm, and its effectiveness was verified.
2. Amplitude of passenger’s head swing became big-
ger while increasing the drive acceleration.
3. The chest movement was largely appeared from
the certain value of the drive acceleration between
1.3 and 1.7 [m/s
2
]
4. From SD questionnaires, high acceleration drive
caused passenger’s discomfort.
5. Ride comfort for the movements to vehicles,
backward direction is the most uncomfortable in
four kinds of movements, and forward, leftward
and rightward directions are almost same level
with respect to comfort. Further, we showed the
possibility that OMW will be able to apply as the
transfer wheelchair without particular discomfort
in the same level with conventional wheelchair
with the ability of only forward and backward
movements.
In the future, to find another factor, experimental
condition such as the driving pattern, the ambient en-
vironment, and the evaluating method for passenger’s
comfort should be studied. Further, motion of slant
and rotation should be studied for investigating the
comfort driving.
ACKNOWLEDGEMENTS
This study was partially supported by The 21st Cen-
tury COE (Center of Excellence) Program ”Intelligent
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
250

Human Sensing”, and also The Hori Information Sci-
ence Promotion Foundation. Authors should give the
sincere thanks to both organizations.
REFERENCES
C.H.Lee, C.W.Kim, and M.Kawatani (2005). Dynamic
response analysis of monorail bridges under moving
trains and riding comfort of trains. In Engineering
Structures Vol.27 pp.1999-2013.
H.Kitagawa, T.Beppu, T.Kobayashi, and K.Terashima
(2002). Motion control of omni-directional
wheelchairs considering patient comfort. In
Proceedings of the IFAC’02 World Congress pp.
T-Tu-E20.
ISO-2631-1 (1997). International organization for standard-
ization. mechanical vibration and shock - evaluation
of human exposure to whole-body vibration - part1 :
General requirements.
J.Urbano, K.Terashima, and T.Miyoshi (2005). Velocity
control of an omni-directional wheelchair considering
user’s comfort by suppresing vibration. In Proceed-
ings of the IEEE IROS 2005 pp.2385-2390.
K.Terashima, J.Urbano, and H.Kitagawa (2006). Enhance-
ment of maneuverability of a power assist omni-
directional wheelchair by application of neuro-fuzzy
control. In Proceedings of the ICINCO 2006 pp.67-
75.
S.Maeda, M.Futatsuka, and J.Yonesaki (2003). Relation-
ship between questionnaire survey results of vibration
complaints of wheelchair users and vibration trans-
missibility of manual wheelchair. In Health and Pre-
ventive Medicine Vol.8 pp.82-89.
S.Shimada, K.Ishimura, and M.Wada (2002). Dynamic
posture measurement and evaluation of electric-power
wheelchair with human. In Proceedings of the
ROBOMEC ’02 1P1-G02 (in Japanese).
Y.Yamagishi and H.Inooka (2005). Driver assistant system
for improvement of ride quality. In Collected papers
of Society of Automotive Engineers of Japan Vol.36
No.1 pp.241-246 (in Japanese).
BEHAVIOR ANALYSIS OF PASSENGER’S POSTURE AND EVALUATION OF COMFORT CONCERNING
OMNI-DIRECTIONAL DRIVING OF WHEELCHAIR
251
