
AUTONOMOUS TRACKING SYSTEM FOR AIRPORT LIGHTING
QUALITY CONTROL
J. H. Niblock, K. McMenemy, S. Ferguson and J. X. Peng
School of Electronics, Electrical Engineering and Computer Science, Queen’s University Belfast, United Kingdom
Keywords:
Airport approach lighting, autonomous tracking, grey level assessment.
Abstract:
The central aim of this research is to develop an an autonomous measurement system for assessing the perfor-
mance of an airport lighting pattern. The system improves safety with regard to aircraft landing procedures by
ensuring the airport lighting is properly maintained and conforms to current standards and recommendations
laid down by the International Civil Aviation Organisation (ICAO).
A vision system, mounted in the cockpit of an aircraft, is capable of capturing sequences of airport lighting
images during a normal approach to an aerodrome. These images are post-processed
a
to determine the grey
level of the approach lighting pattern (ALP). In this paper, two tracking algorithms are presented which can
detect and track individual luminaires throughout the complete image sequence. The effective tracking of
the luminaires is central to the long term goal of this research, which is to assess the performance of the
luminaires’ from the recorded grey level data extracted for each detected luminaire. The two algorithms
presented are the Niblock-McMenemy (NM) feature tracking algorithm has been optimised for the specific
task of airport lighting and to assess its effectiveness it has been compared to the Kanade-Lucus-Tomasi (KLT)
feature tracking algorithm. In order to validate both algorithms a synthetic 3D model of the ALP is presented.
To further assess the robustness of the algorithms results from an actual approach to a UK aerodrome
b
are
presented.
The results show that although both KLT and NM feature trackers are both effective in tracking airport lighting
the NM algorithm is better suited to the task due to its reliable grey level information. Limitations, such as the
static window size, of the KLT algorithm result in a lossy grey level data and hence lead to inaccurate results.
a
Algorithms are being developed for real-time processing
b
Belfast International Airport
1 INTRODUCTION
A substantial increase in the demand for air trans-
port has resulted in the larger size of aircraft and in-
creased frequency of flights. This requires higher per-
formance and better maintenance of the airport light-
ing pattern (Matsunaga, 1980). One such way of
achieving this is to regularly monitor airport lighting
with the aim of highlighting and repairing any under-
performing luminaires.
Several land based measurement systems such
as the Mobile Airfield Light Monitoring System
(MALMS
1
) and Photometric Airfield Calibration
1
http://www.tmsphotometrics.com/
(PAC
2
) are capable of assessing the performance of
inset runway lighting through the use of light me-
ters and cameras respectively. Typically these sys-
tems work by collecting data as a truck drives over
or past the rows of lighting. However, the major lim-
itation of these systems are that they are incapable of
assessing the performance of the approach lighting
were the luminaires are raised a minimum distance
of 2m above ground level. Thus, this paper proposes
an aerial imaging system that is capable of assessing
the approach lighting during an approach to an aero-
drome.
Milward (Milward, 1976) was the first person in
2
http://www.gsilight.com/ppaclabcombo.htm
317
H. Niblock J., McMenemy K., Ferguson S. and X. Peng J. (2007).
AUTONOMOUS TRACKING SYSTEM FOR AIRPORT LIGHTING QUALITY CONTROL.
In Proceedings of the Second International Conference on Computer Vision Theory and Applications - IU/MTSV, pages 317-324
Copyright
c
SciTePress
1976 to acknowledge the potential of an aerial imag-
ing system in assessing the performance of airport
lighting. With the advance of mobile technology and
external storage devices it is easier and quicker than
ever to process the lighting patterns performance. It
is possible to assess the performance of aerodrome
ground lighting (AGL) using aerial based imaging
techniques (McMenemy and Dodds, 2003). A vision
system is platform mounted, to minimise the effects
of vibration, in the cockpit of an aircraft. During a
normal approach to an aerodrome a video sequence
is captured, approximately 2 minutes in length. The
video is split into its component frames and analysed
off-line. Not all frames are analysed. For the pur-
poses of this paper a subsection of the acquired im-
ages, namely the section including the approach light-
ing pattern (ALP) are used for the performance as-
sessment.
This paper presents two algorithms. The first
termed the Niblock-McMenemy (NM) feature track-
ing algorithm has been optimised for the application
of tracking an airport lighting pattern. To place the
algorithm in context, it is compared and contrasted to
the KLT feature tracking algorithm which is seen as
one of the standard algorithms for tracking applica-
tions. Before the autonomous tracking algorithms are
detailed, in the following section, an overview of the
lighting pattern and the vision system are presented.
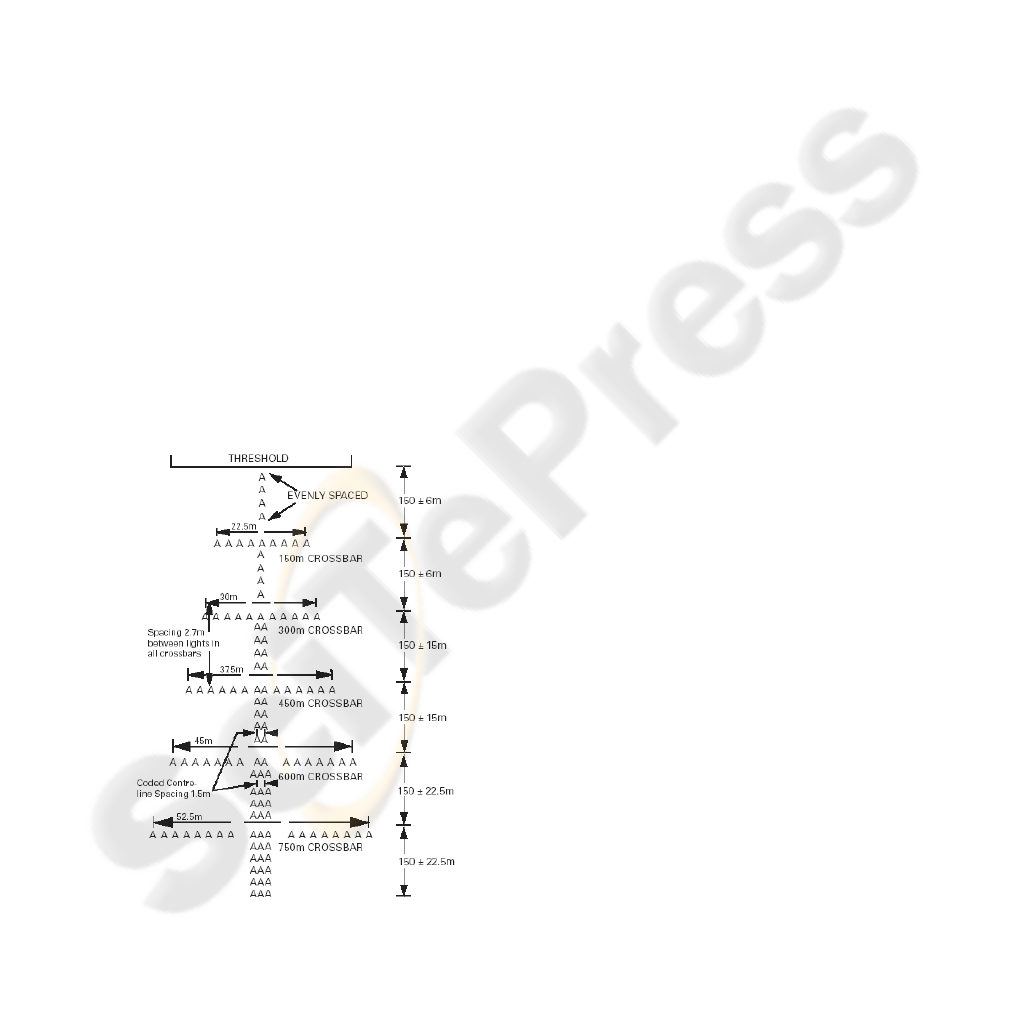
Figure 1: CATI Approach Lighting Pattern.
1.1 Approach Lighting Pattern Layout
Strict guidelines exist for the location and position-
ing of the luminaires. Such standards are docu-
mented in the International Civil Aviation Organisa-
tions (ICAO) Standards and recommended practices
documents (ICAO, 2004).
Milward presents an overview of the standard
Calvert System. This is the standardised lighting sys-
tem used in the UK and Europe. The approach light-
ing system consists of a 900m coded line of white
lights, on the extended centreline of the runway, and
five crossbars at 150m intervals. The bars decrease in
width towards the runway threshold, lines through the
outer lights of the bars convergingto meet the runway
centreline 300m upwind from the threshold (Milward,
1976). This is illustrated in figure 1 (ICAO, 2004).
1.2 Vision System Overview
The vision system consists of a monochrome vision
sensor with manual lens mounted on a vacuum based
platform to minimise the effects of vibration. The
vision sensor is connected to an Intel Pentium IV
processor. Controller software acts as an interface be-
tween the processor and the vision sensor. A USB2.0
medium acts as a communications/power mechanism
between computer and vision sensors.
1.3 Autonomous Luminaire Tracking
Tracking has been extended to a number of applica-
tions from video surveillance; medical research and
image reconstruction (Pollefeys and Gool, 1999) to
name a few. This paper is concerned with tracking
lighting performance. To this end a lot of research ex-
ists for street lighting however this paper is concerned
with monitoring an airport ALP. Two tracking algo-
rithms are presented. The first algorithm termed the
Niblock-McMenemy (NM) algorithm is introduced in
section 2 and is summarised in figure 2. This is a fea-
ture extraction algorithm that tracks a series of single
pixels through an image sequence.
The second technique termed the Kanade-Lucus-
Tomasi (KLT) algorithm (Lucas and T.Kanade, 1981)
is a globally recognised feature tracking algorithm
and is introduced in section 3. The KLT method de-
fines the measure of match between fixed-sized fea-
ture windows in the past and current frame as the sum
of squared intensity differences over the windows.
The displacement is then defined as the one that min-
imises this sum. For small motions, a linearisation of
the image intensities leads to a Newton-Raphson style
minimisation (Tomasi and Kanade, 1991).

Figure 2: NM Tracking Algorithm Overview.
This paper compares and contrasts the NM algo-
rithm with the adapted KLT algorithm. In order to do
this a synthetic model of the approach lighting pattern
(ALP) has been generated (section 4) in order to sim-
ulate a real life approach to an aerodrome. As a means
of measuring the performance of an ALP a measure of
the total grey level of each luminaire is recorded over
the duration of an approach to the aerodrome. This
provides the system with information on each lumi-
naires performance which in turn allows the system to
make a decision on whether or not the lighting pattern
conforms to the relevant standards. Section 5 presents
grey level results obtained from actual images cap-
tured during a real-life approach to a UK aerodrome
3
.
These images are used to assess the robustness of the
tracking algorithms and highlight potential improve-
ments. Future work and conclusions are presented in
sections 6 and 7 respectively.
2 NM TRACKING ALGORITHM
This section presents the NM tracking algorithm com-
posed of three states: locking state, tracking state and
the recovery state. The three states are highlighted in
figure 2.
3
The authors would like to thank Flight Precision
(http://wwwflightprecision.co.uk) for allowing us flight
time whilst performing maintenance work on Belfast Inter-
national Airport’s lighting.
2.1 Locking State
The objective of the locking state is to home in on
the target. The target being the approach lighting pat-
tern. When the target is of acceptable size (McMen-
emy and Dodds, 2003) the imaging system triggers
and starts to acquire data. The video segment is cur-
rently analysed off-line
4
. A check is performed on
the subsequent image sequence to assess if the image
is skewed and in need of realignment. A line approxi-
mating the horizon is drawn on the first image and the
skew angle computed. Using this angle the image is
rotated by the appropriate factor ensuring the rows of
luminaires are in straight lines. The horizon can have
an adverse effect on the extraction process. Stray light
can cause the extraction algorithm to detect too many
luminaires. Therefore, once the horizonhas been used
to de-skew the images the region of interest (ROI) i.e.
the ALP is cropped, making sure to retain the original
positional information.
2.2 Tracking State
Once the target has been identified the next step is to
extract the relevant foreground information and track
it through the image sequence. The following process
is undertaken to extract, identify and track the lu-
minaires. Each image contains a set of foreground,
bright pixels termed blobs. If the extraction process
were ideal, each detected blob would relate to a single
luminaire in the lighting pattern. The objective of the
extraction process is to highlight the useful informa-
tion, foreground information, from a set of dark pix-
els termed background information or noise. Back-
ground differencing and thresholding techniques are
used to minimise the effects of noise in the image.
Connected Component Analysis (CCA) using 8-
way connectivity(Haralick and Shapiro, 1993) is used
to yield a set of binary points used to segment the im-
age into regions. This process yields a set of smooth
blobs corresponding to each of the moving objects.
The objective of the connected component analysis
is to determine the connected set of components in
an image and assign a distinct label to each pixel in
the same connected component. The number of lu-
minaires (blobs) present depends on the category of
lighting pattern. This information is obtained from
the standards (ICAO, 2004). For the purposes of this
paper a CATI ALP is assumed with a total of 120 ap-
proach luminaires.
4
It is the long term aim to have an imaging system that
works in real-time. All algorithms are being developed with
this objective in mind.

A center of mass algorithm shown in equation 1
is used to compute the mean x,y coordinate for each
detected blob in the image.
{ ¯x
i
, ¯y
i
} =
∑
j∈J
i
x
ij
m
i
,
∑
j∈J
i
y
ij
m
i
(1)
where ¯x
i
, ¯y
i
represents the coordinate of the i
th
blob,
i∈I represents the set of detected blobs’ in the image
and J
i
represents the set of m
i
individual pixels that
constitutes the blob.
In a binary image an unlabelled object is assigned
a label based on its (x,y) image location. A scan is
undertaken of the neighbouring objects until all the
blobs have been labelled. The usual notation used to
label the blobs is a set of integers (1...N) where N
corresponds to the number of blobs detected in the
image. The objective of thresholding and image dif-
ferencing is to minimise the probability that noise in
any given image will affect the CCA results. There
are occasions when this is not the case:
1. Inadequate sensor resolution can lead to merging
of luminaires
2. Reflections may cause stray noise and flag up
light sources that should not be present in the
ALP
3. Luminaires leaving and entering the field of view
of the sensor
4. Occlusions, where a luminaire is obstructed by
an obstacle from the field of view of sensor. In
the case of an occlusion the luminaire must be
tracked and only when it has left the screen for
10 consecutive images can it be dropped.
If the expected number of luminaires is not equal to
the actual number of luminaires extracted during the
CCA a recovery state is required, see figure 2. A
count is kept of blobs that fall out of the FOV of
the sensor. This count is deducted from the expected
number of luminaires to keep the system accurate. de-
tected blobs in the first image (120) so that
2.3 Recovery State
This is a correspondence problem, i.e. given a feature
in an image, what is the corresponding feature (i.e.
the projection of the same 3D feature) in the other
image (Pollefeys and Gool, 1999). Let’s assume p
and q to be of the form expressed in equations 2 and
3 respectively.
p = x
fi
,y
fi
(2)
q = x
( f−1)i
,y
( f−1)i
(3)
where p is a blob in the current image (f) and q is a
blob in the previous image (f-1) and i denotes the blob
number/id.
For each blob q
i
in the previous frame, the objec-
tive is to locate the blob p
i
which is closest to it in the
current frame and assign it the same label. A number
of problem scenarios can arise. This happens when
there is a mismatch between the number of luminaires
in the current frame compared to the previous frame.
Two scenarios can occur:
1. Less luminaires are present in the current frame
2. More luminaires are present in the current frame
In the first scenario the 2D Euclidean distance (4)
of each blob in the current frame is computed from
each blob in the previous frame. When a num-
ber of blobs satisfy the Euclidean distance, i.e.
E(p,q) ≤ threshold where threshold is the maximum
displacement a luminaire may shift between consec-
utive images, their grey level and pixel count are
searched to find the closest correlation. The resul-
tant blob is matched and the process repeated for
all N blobs in the image frame. If a blob fails to
be matched, i.e. E(p,q) > threshold, it is assigned
a flag ’0’. To compensate for this the CCA re-
sults (luminaireNo, position, greyLevel, pixelCount)
are incremented to accommodate the missing blob
(Gonzalez and Woods, 2004). Once all the blobs in
the current image have been matched the frame num-
ber f is incremented and the process repeated.
E(p,q) =
s
N
∑
i=1
(p
i
− q
i
)
2
(4)
The second scenario is that of having too many
blobs in the current image frame. This is typically
caused by extreme cases of vibration and luminaires
coming back into the field of view of the imaging sen-
sor from an occlusion. Figure 3 shows an example
luminaire that appears to consist of two bright spots
with an axon of interconnecting darker pixels. De-
pending on the threshold this blob can be represented
by one/two luminaires. There are two ways of ascer-
Figure 3: The Effects of Vibration on a Single Luminaire.

taining when a luminaire has split into two parts or
components due to vibration:
1. There are too many luminaires present in the
current frame
2. The pixel count for each component is less than
the expected value from the last frame
When the recovery algorithm is called it scans the
grey level comparing the current frame with the pre-
vious frame. At the same time, the pixel count (that
is the number of pixels that constitute a luminaire) is
also compared. When a luminaire splits, the value of
the grey level and the pixel count decreases. Once
the luminaires at fault are identified, the problem is
rectified by summing the associated pixel counts and
grey levels together for the problem luminaire. The
problem luminaire still has multiple locations, due to
being split, so a new position is evaluated using equa-
tion 1. The aforementioned CCA results are updated
accordingly, by decrementing the data one element,
so that the effects of vibration are accounted for and
the actual number of luminaires is consistent with that
of the last frame.
This section has introduced the reader to the NM
algorithm and its basic operation. The following sec-
tion introduces the KLT feature tracker algorithm.
3 KLT TRACKING ALGORITHM
This section introduces the theory behind the Kanade-
Lucus-Tomasi (KLT) algorithm before analysing how
it performs on the synthetic airport lighting model
presented in section 4.
As the camera moves, the platform of image in-
tensities change in a complex way. In general, any
function of three variables I(x,y,t), where the space
variables x and y as well as the time variable t are
discrete and suitably bounded, can represent an im-
age sequence. However, images taken at near time
instants are usually strongly related to each other, be-
cause they refer to the same scene taken from only
slightly different viewpoints.
We usually express this correlation by saying that
there are patterns that move in an image stream. For-
mally, this means that the function I(x,y,t) is not ar-
bitrary, but satisfies the property shown in equation
5.
I(x, y, t + τ) = I(x− ξ,y− η,t); (5)
where, a later image taken at time t + τ can be ob-
tained by moving every point in the current image,
taken at time t, by a suitable amount. The amount
of motion d = (ξ,η) is called the displacement of the
point x=(x,y) between the time instants t and t+ τ, and
is in general a function of x,y,t and τ (Shi and Tomasi,
1994).
An important problem in finding the displacement
d of a point from one frame to the next is that a single
pixel cannot be tracked, unless it has very distinctive
brightness with respect to its neighbours. In fact, the
value of the pixel can both change due to noise, and
be confused with adjacent pixels. As a consequence,
it is often hard or impossible to determine where the
pixel went in the subsequent frame, based only on lo-
cal information. Due to these problems the KLT algo-
rithm doesn’t track single pixels but windows of pix-
els and it looks for windows that contain sufficient
texture. Formally, if we redefine J(x) = I(x,y,t+ τ),
and I(x − d) = I(x − ξ,y − η,t), where the time has
been dropped for brevity, our local image model is
represented by equation 6.
J(x) = I(x− d) + n(x), (6)
where n is noise. The displacement vector d is then
chosen so as to minimise the residue error defined by
the double integral over the given window W shown
in equation 7
ε =
W
[I(x− d) − J(x)]
2
wdx (7)
In this expression, w is a weighting function. In the
simplest case w could be set to 1. Alternatively, w
could be a Gaussian like function, to emphasise the
central area of the window. This is user defined.
Several methods have been proposed to minimise the
residue in equation 7. This paper assumes the lin-
earisation method used when the displacement d is
much smaller than the window size and is detailed in
(Tomasi and Kanade, 1991).
3.1 Adapting the KLT Algorithm
By default the KLT algorithm accepts a series of
Portable Gray Map (PGM) image files as the input
file and outputs a Portable Pixel Map (PPM) results
file. A number of alterations, figure 4, were car-
ried out in order to make the airport lighting images,
in either Audio Video Interleave (AVI) or uncom-
pressed bitmap (BMP) format, compatible with the
KLT tracking algorithm. These alterations allow the
KLT algorithm to accept a BMP, AVI or PGM file
as the input and store the results in a structure, an
AVI video with tracked results superimposed or a se-
quence of PPM image files with tracked results su-
perimposed. A number of other alterations were per-
formed and are highlighted in later sections.
The next section introduces a virtual model of the
approach lighting pattern used to compare and con-
trast the two tracking algorithms covered in sections
4.1 and 4.2.
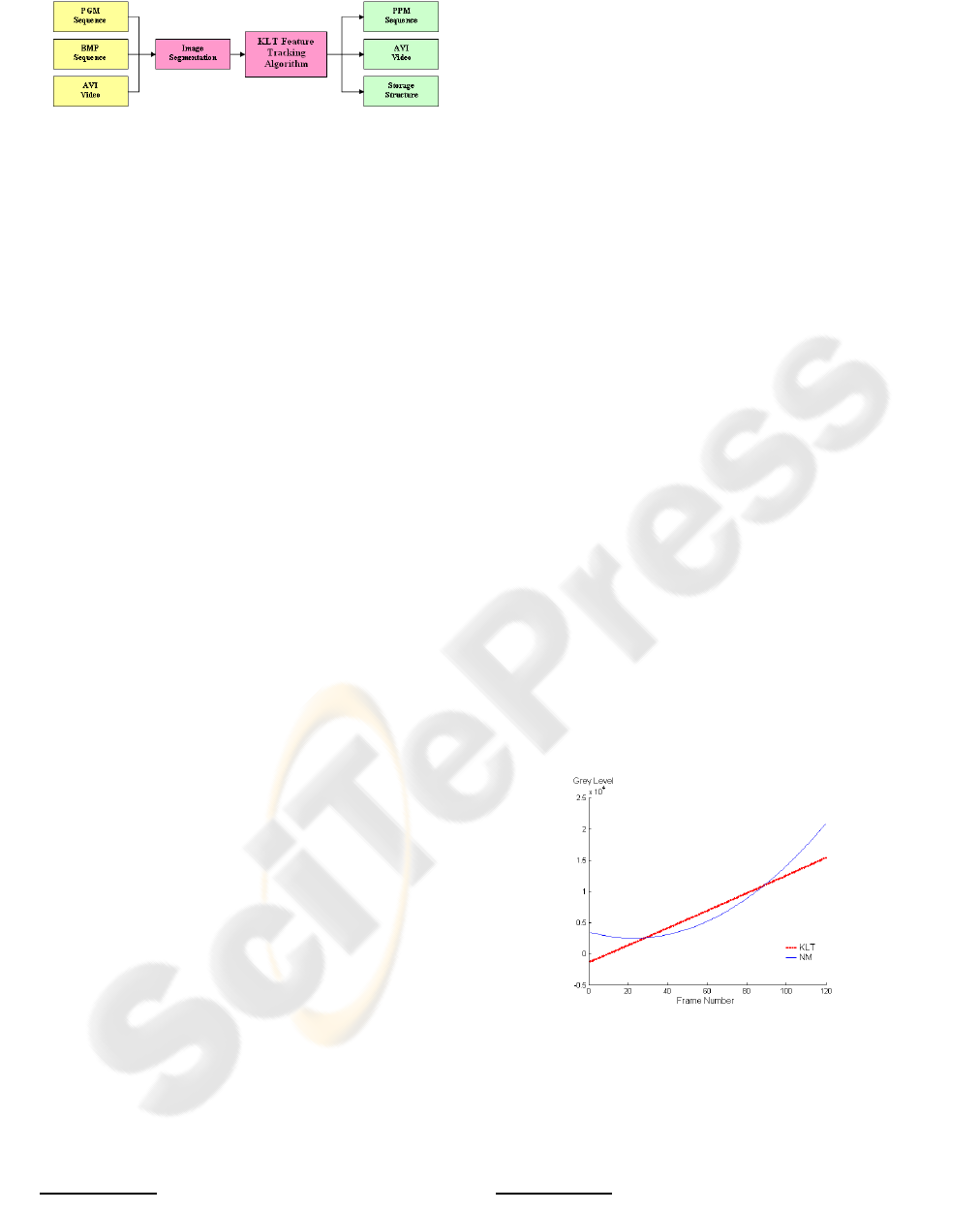
Figure 4: Upgrades to KLT Algorithm.
4 TRACKING VALIDATION
Virtual modelling and scene renderingare particularly
useful in cases where it is not viable to continually
test developed algorithms on a real life model. To aid
testing and comparison of the tracking algorithms a
3D model of the approach airport lighting pattern has
been generated. 2D information taken from Belfast
International Airport is adapted to include luminaire
height information, obtained from the ICAO stan-
dards (ICAO, 2004), and rendered into a 3D model
using OpenFX software
5
. This model offers a low
cost solution to test the tracking algorithms presented
in this paper and highlight any limitations the algo-
rithms may have. As strict guidelines are enforced on
lighting pattern layout a generic ALP model can be
used to represent any CATI lighting pattern. Three
assumptions are made about the ALP:
1. All luminaires are present in the lighting pattern
2. All luminaires have equal performance
3. No noise exists in the image sequence - such as
horizon, ground and runway markings
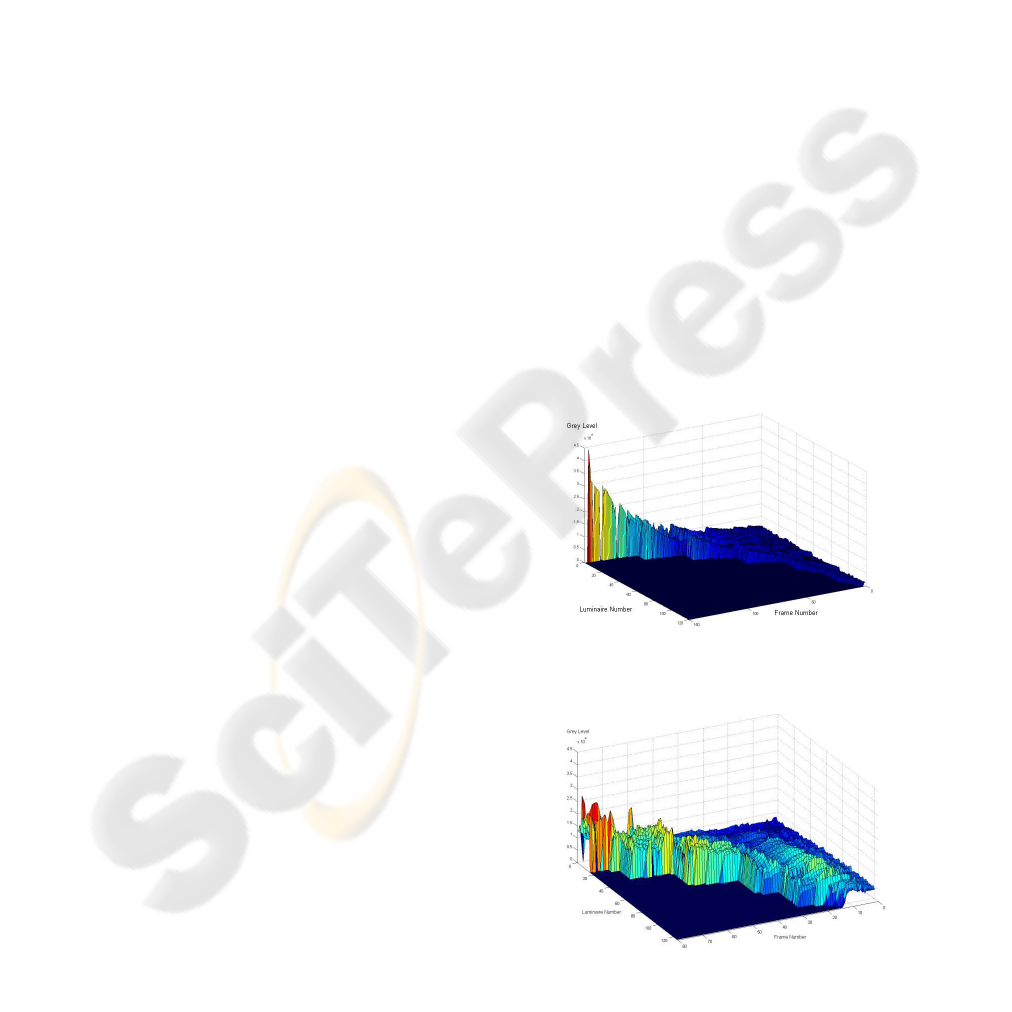
4.1 NM Model Response
The model data was tracked using the NM tracking
algorithm outlined in section 2. A complete approach
to the ALP was simulated over 150 images. All lumi-
naires were correctly identified, labelled and tracked
throughout the image sequence. A relationship exists
between the total grey level and distance. As the air-
craft gets closer to the luminaires, i.e.the frame num-
ber increases, so too does the surface area of each lu-
minaire and hence the total grey level. This is rep-
resented in 5 where a best fit polynomial is used to
represent the grey level data. The grey level informa-
tion for each extracted luminaire will be used, in later
research, to assess the performanceof the luminaires’.
As such it is important that the tracking algorithm is
able to correctly record the grey level information.
The NM algorithm was able to track and record the
grey level of all the luminaires in the lighting pattern
taking a total average time of 355.796 seconds to run,
see table 1.
5
http://www.openfx.org/
4.2 KLT Model Response
In order to adapt the KLT algorithm two variables are
varied, namely the window size and the number of fea-
tures. When all features are present there is a total
of 120 luminaires in the ALP, therefore the number
of features to track is 120. The second constant is
the window size. For the purposes of this research
this was set to 7x7 pixels. As the effects of noise
have been ignored in the synthetic data due to the sur-
roundings being controlled no further alterations to
the generic KLT algorithm are required.
The KLT algorithm took 378.52 seconds to exe-
cute 150 frames, see table 1
6
. The algorithm performs
well on the ALP outputting a similar trend of increas-
ing grey level to that the NM algorithm. The results
for a random luminaire are presented in figure 5. A
problem can arise due to the static window size im-
plemented by the KLT algorithm. If a maximum 8-bit
grey level of 220 is used for each pixel (above this
value saturation occurs which is not desirable) then a
window of 7x7 pixels has a maximum grey level of
17380. This is below the top end of the grey level val-
ues obtained in figures 7 and 8 respectively (as much
as 45000). At the onset of the approach minimal dis-
ruption occurs as the luminaires cover a small num-
ber of pixels. However, as the aircraft gets closer to
the luminaires the luminaires cover a larger number
of pixels (outside the predefined range of the KLT al-
gorithm) and hence the grey level data is termed to be
lossy. In order to avoid this the window size can be
increased. This however has its own problems such as
features being merged as the window size is too large.
For more details see section 6.
Figure 5: Synthetic Grey Level Data Comparison.
6
All results are averaged over 5 program executions.
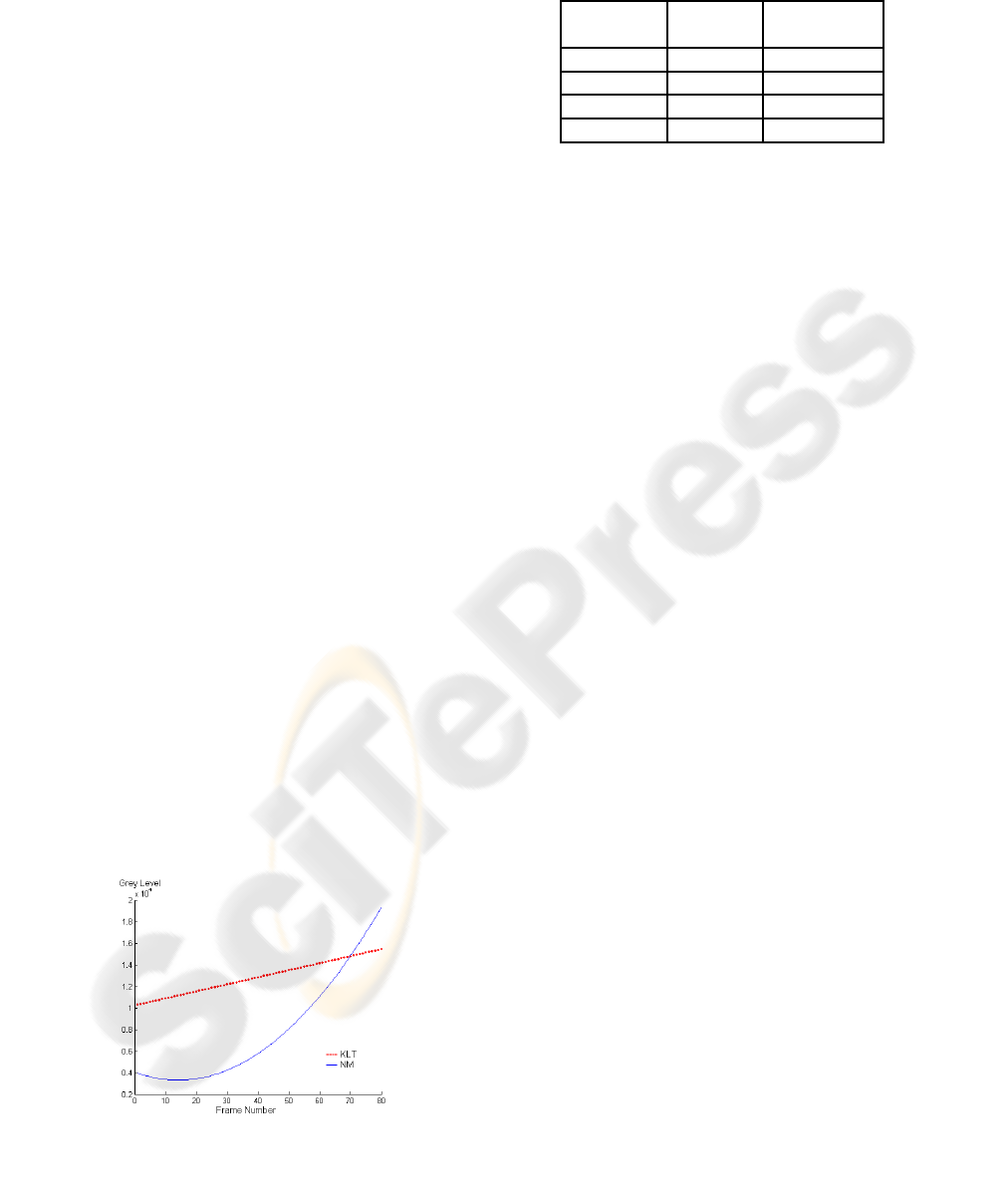
5 ACTUAL APPROACH DATA
This section uses actual approach data to further test
the effectiveness of the NM and KLT feature tracking
algorithms. The section has two main aims: To test
the robustness of the tracking algorithms and to as-
sess whether or not the synthetic model is an accurate
representation of an actual approach.
5.1 Sample Results
The NM grey level data for a complete approach is
shown in figure 8. The first thing to note is the trend
between the simulated results and the actual results.
Like figure 7, figure 8 shows how the luminaires go
from a low grey level (5000) to a high grey level
(30000) as the aircraft gets closer to the luminaires.
For the KLT algorithm a number of alterations
have to be made to the system presented in section
4.2, these additions are detailed in figure 4. As the ef-
fects of noise, especially the horizon, are more com-
mon in the real images a rectangle function is used to
segment the region of interest (ROI) in the actual im-
ages where the ROI is the ALP. If this step is not im-
plemented false features are sent to the KLT algorithm
rendering the grey level data meaningless. The results
are summarised in table 1. Figure 6 shows how as the
NM algorithm accurately captures the grey level data
above the 17000 mark. In comparison the KLT al-
gorithm tails off losing valuable grey level and hence
performance information. The KLT starts off in frame
one with a grey level of approximately 11000 whereas
the NM algorithm starts at 4000. The luminaire cho-
sen at random was one furthest away from the vi-
sion system. As such the NM algorithm merged it
with neighbouring blobs resulting in multiple under-
performing luminaires and one over-performinglumi-
naire.
Figure 6: Actual Grey Level Data Comparison.
Table 1: NM versus KLT Results for Actual(A) and Syn-
thetic(S) Data.
Algorithm Time/ Extracted
Name Frame(s) Features(%)
KLT(A) 1.90 93
KLT(S) 2.52 95
NM(A) 2.04 98
NM(S) 2.4 98
5.2 Discussion
The NM algorithm has an average execution time of
2.04 seconds/frame. This has a strong correlation
with the execution time of the synthetic model in sec-
tion 4.1. However, as the NM is a point tracker on
occasions mismatches can occur. An example of this
can occur when two luminaires have the same Euclid-
ean distance and similar grey levels. This can lead
to luminaire histories being confused. The KLT al-
gorithm performs well on the actual images. It is
able to successfully extract 93% of the luminaires and
track them through an image sequence. However, it
is clear that if this method is to be used to track the
airport lighting more advanced noise removal tech-
niques, like that shown for the NM algorithm in sec-
tion 2.2, are required to minimise the effects of back-
ground noise.
6 FUTURE WORK
One of the major limitations with the KLT algorithm
is the inaccuracy caused by the static window size. If
the window size is too small this will result in inaccu-
rate grey level information. If the window size is too
large, the luminaires will be merged. For this applica-
tion it is essential that the grey level is computed cor-
rectly. To this end a dynamic window is proposed that
will vary according to the aircraft displacement from
the lighting pattern. The NM algorithm uses CCA
for this purpose. Therefore, if the tracking aspect for
the KLT is merged with the performance assessment
form the NM algorithm the optimum tracking algo-
rithm will be realised. A second limitation of the KLT
algorithm is the effects of background noise. A model
of the background noise can be created and using dif-
ferencing techniques subtracted rom the image data in
order to reduce the effects of noise. As a final note,
image tracking is only capable of classifying the lu-
minaires into a pass/fail category. Future work has to
be done into producing performance assessment in-
formation for the ALP.
7 CONCLUSION
Two contributions are presented in this paper. The
first is a tracking algorithm that can successfully track
the luminaires in an airport ALP. The second is a tool
for verifying the tracking algorithms without the need
for actual image data.
To satisfy the first objective, two tracking algo-
rithms are presented that assess the grey level of lu-
minaires in a CATI airport ALP. Both the NM and
the KLT algorithms are capable of tracking the syn-
thetic and actual approach reliably, with over 90% of
the features being successfully tracked. However, a
limitation of the KLT algorithm was found to be the
static nature of the window size and its vulnerabil-
ity to background noise. The NM algorithm, being
a point tracker, is prone to false matches which can
lead to confused luminaire histories. Therefore, it is
proposed that a combination of the two algorithms be
found for optimum tracking.
The second objective was to assess if the synthetic
model proposed is an accurate model for an approach
to the aerodrome. The results are conclusive. The
model data has a strong correlation with that of the
actual data. This is shown in figures 7 and 8 respec-
tively. However, research is still required to make the
model more realistic. Accurate correction for noise
has to be realised. This can be done in OpenFX by
adding rain, fog, ground markings and a horizon.
ACKNOWLEDGEMENTS
The authors would like to thank the European Social
Fund (ESF) and the Royal Academy/Society of Engi-
neers for their financial backing. The authors would
also like to thank Flight Precision for allowing us
flight time.
REFERENCES
Gonzalez, R. and Woods, R. (2004). Digital Image Process-
ing using Matlab. Pearson Prentice Hall.
Haralick, R. and Shapiro, L. (1993). Computer and Robot
Vision vol. 2. Addison-Wesley Publishing Company
Inc.
ICAO (2004). Aerodrome Design and Operations. Annex
14, Volume 1, Fourth Ed.
Lucas, B. and T.Kanade (1981). An iterative image regis-
tration technique with an application to stereo vision.
In Proc. 7th Int Joint Conference on Artificial Intelli-
gence, Vancouver, pp.674-679.
Matsunaga, N. (1980). Automatic monitoring system for
the ccr and aerodrome lighting system on airport sys-
tem. In IECI Annual Conference Proceedings (Indus-
trial Electronics and Control Instrumentation Group
of IEEE, p411-416).
McMenemy, K. and Dodds, G. (2003). Calibration and
use of video cameras in the photometric assessment of
aerodrome ground lighting. In The International So-
ciety for Optical Engineers, Electronic Imaging, Vol.
5017, pp. 104-115.
Milward, R. (1976). New approach to airport lighting in-
spection. In Shell Aviation News, Vol. 437, pp26-31.
Pollefeys, M. and Gool, L. V. (1999). Self-calibrated and
metric 3d recognstruction from uncalibrated image se-
quences. In PhD Thesis.
Shi, J. and Tomasi, C. (1994). Good features to track.
In Proceedings of the IEEE Computer Society Con-
ference on Computer Vision and Pattern Recognition,
p593-600.
Tomasi, C. and Kanade, T. (1991). Detection and traking
of point features. In Shape and Motion from Image
Streams: a Factorization Method-Part 3, Technical
Report CMU-CS-91-132.
APPENDIX
Figures 7 and 8 respectively show the grey level data
for an ALP for a synthetic and actual approach.
Figure 7: Synthetic Grey Level Data for NM Algorithm.
Figure 8: Actual Grey Level Data for NM Algorithm.
