
THREE-DIMENISONAL MONOCULAR SCENE
RECONSTRUCTION FOR SERVICE-ROBOTS
An Application
Sascha Jockel
CINACS, MIN Faculty, Dept. of Computer Science, University of Hamburg, Germany
Tim Baier-L
¨
owenstein, Jianwei Zhang
Technical Aspects of Multimodal Systems, MIN Faculty, Dept. of Computer Science, University of Hamburg, Germany
Keywords:
3D reconstruction - stereo vision - robotics - 3D model acquisition.
Abstract:
This paper presents an image based three dimensional reconstruction system for service-robot applications in
case of daily table scenarios. Image driven environment perception is one of the main research topics in the
field of autonomous robot applications and fundamental for further action-plannings like three dimensional
collision detection and prevention for grasping tasks.
Perception will be done at two spatial-temporal varying positions by a micro-head camera mounted on a
six-degree-of-freedom robot-arm of our mobile service-robot TASER. The epipolar geometry and fundamen-
talmatrix will be computed by preliminary extracted corners of both input images detected by a Harris-corner-
detector. The input images will be rectified using the fundamentalmatrix to align corresponding scanlines
together on the same vertical image coordinates. Afterwards a stereo correspondence is accomplished by a
fast Birchfield algorithm that provides a 2.5 dimensional depth map of the scene. Based on the depth map a
three dimensional textured point-cloud is represented as interactive OpenGL scene model for further action-
planning algorithms in three dimensional space.
1 INTRODUCTION
Three dimensional vision nowadays is a well inves-
tigated research field and was made easily accassi-
ble not only due to 3D pioneer Hartley (Hartley and
Zisserman, 2003) or by work of Faugeras (Faugeras,
1993) and Ma et al. (Ma et al., 2004). Beyond car as-
sistance systems, surveying, inspection and manufac-
turing techniques especially robotics can benefit from
3D vision. 3D environment maps can represent much
more information than 2D plan views can do.
A variety of algorithms exists that each of them
dealing with specific tasks of 3D vision. Tsai (Tsai,
1986) gives detailed explanation why camera cali-
bration is fundamental to 3D sensing with robots.
Moravec and Harris (Harris and Stephens, 1988) have
done a lot of research in edge and corner detec-
tion which is fundamental for many correspondance
analysis. To solve the epipolar geometry several
approaches were proposed. Nonlinear methods as
Gauss-Newton and Levenberg-Marquardt optimiza-
tion from mathematics and least-median-of-squares
(Rousseeuw and Leroy, 1987) and RANSAC (Fis-
chler and Bolles, 1981). The 8-point algorithm
(Longuet-Higgins, 1981) is counted among the lin-
ear approaches. Trucco and Verri wrote an excel-
lent overview of 3D vision (Trucco and Verri, 1998).
Together with Fusiello they payed special attention
to rectify image pairs (Fusiello et al., 2000), as also
Pollefeys (Pollefeys et al., 2000), Hartley (Hartley,
1999) and Zhang (Zhang, 1998) did. The problem of
stereo correspondance is approached in different ways
with local windowing functions, graph cuts (Boykov
et al., 1999) and fast dynamic algorithms by Birch-
field and Tomasi with improved occlusion property
(Birchfield and Tomasi, 1998).
This variety of specialized algorithms are well
tested and documented but only several publications
exists yet of cohere such task oriented algorithms to
a single reconstruction system for real-life service-
robot applications. Thus this work focus on the devel-
opment of a three dimensional reconstruction system
based on well-known and fast algorithms. Since the
system is used with our service-robot TASER (Fig. 1)
41
Jockel S., Baier-Löwenstein T. and Zhang J. (2007).
THREE-DIMENISONAL MONOCULAR SCENE RECONSTRUCTION FOR SERVICE-ROBOTS - An Application.
In Proceedings of the Second International Conference on Computer Vision Theory and Applications, pages 41-46
DOI: 10.5220/0002041100410046
Copyright
c
SciTePress

Figure 1: TASER service robot.
we have to pay attention to leave resources available
for other indispensable robotic tasks, e.g. localisation,
navigation, kinematics, sensor processing and motor
control. Hence few subtasks of the reconstruction
system uses algorithms supported by Intels OpenCV
library (Intel, 2005) that fortunately are higly opti-
mized to Intel core architectures. As input device a
single mikro-head camera mounted on a six-degree-
of-freedom robot-arm is used to obtain highest flexi-
bility in the process of image acquisition concerning
positioning and variability of baseline offset.
The remainder of this papers is organized as fol-
lows. In section 2 we briefly describe theoretical
background to determine relative camera orientations
and displacement. In section 3 we present the im-
plementation of our reconstruction system for the
mobile-robot system TASER. Experimental results
are presented in section 4. Finally, we conclude in
section 5 and give some remarks regarding the effi-
cency of our implementation.
2 THEORETICAL BACKGROUND
Bevor describing the proposed three dimensional re-
construction system, we introduce some concepts of
epipolar geometry.
Given a pair of views of a scene and a set of cor-
responding points x
i
, x
0
i
in homogeneous coordinates,
there exists a matrix F ∈ R
3×3
, called the fundamen-
tal matrix (Faugeras, 1993), such that:
x
0T
i
Fx
i
= 0 ∀i (1)
For any Point x
i
(analogical x
0
i
) in on view, the
product F p
i
(F
T
p
0
i
) defines a line, called the epipo-
lar line, in the other view such that the corresponding
point x
0
i
(x
i
) belongs to this line. Moreover the right
null vector of F (F
T
) represents the epipole e (e
0
) on
the image plane. The fundamental matrix has maxi-
mum rank 2.
For image pairs the fundamental matrix F pro-
vides a constraint to identifying mismatches between
image corners since corresponding corners are con-
strained to lie on respective epipolar lines.
An importand advantage to solve the correspon-
dance problem is rectfication. Rectification deter-
mines a transformation of each image plane such that
pairs of conjugate epipolar lines become collinear and
parallel to one of the image axes – usually the hori-
zontal one (Fusiello et al., 2000). Thus computing the
2D stereo correspondance is reduced to a 1D corre-
spondance search along the horizontal epipolar lines.
The resulting computaion of displacement of two
corresponding pixels is called disparity. Together
with the baseline, the distance between optical cen-
ters c and c
0
at both image capture position, the focal
length and above-mentioned disparity via triangula-
tion the 3D position of a pixel can be recovered.
3 IMPLEMENTATION
Fig. 2 illustrates the workflow of the developed three
dimensional reconstruction system for our service-
robot TASER. This robot is build completely upon
of-the-shelf components without any custom prod-
ucts. The mobile plattform is equipped with a
PA10-6C six-degree-of-freedom robot-arm from Mit-
subishi Heavy Industries with an artificial BH-262
BarrettHand
TM
mounted as tool with strain gauge sen-
sor. Additionally a jAi micro-head camera is mounted
at the BarrettHand
TM
with an JK-L7.5M Toshiba lense
as shown in Fig 3 (Baier et al., 2006). The robot
is controled by a Pentium IV 2.4GHz standard com-
puter.
In our system at early processing stages the im-
ages of both capture positions are processed sepa-
rately and first will be merged for the computation of
fundamental matrix. The processes of the flow-chart
will be briefly described in the next paragraphs.
CAMERA CALIBRATION
The mikro-head hand-camera was calibrated a
priori by a robust Tsai calibration algorithm (Tsai,
1986). The reason is as follows. Our mikro-head
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
42
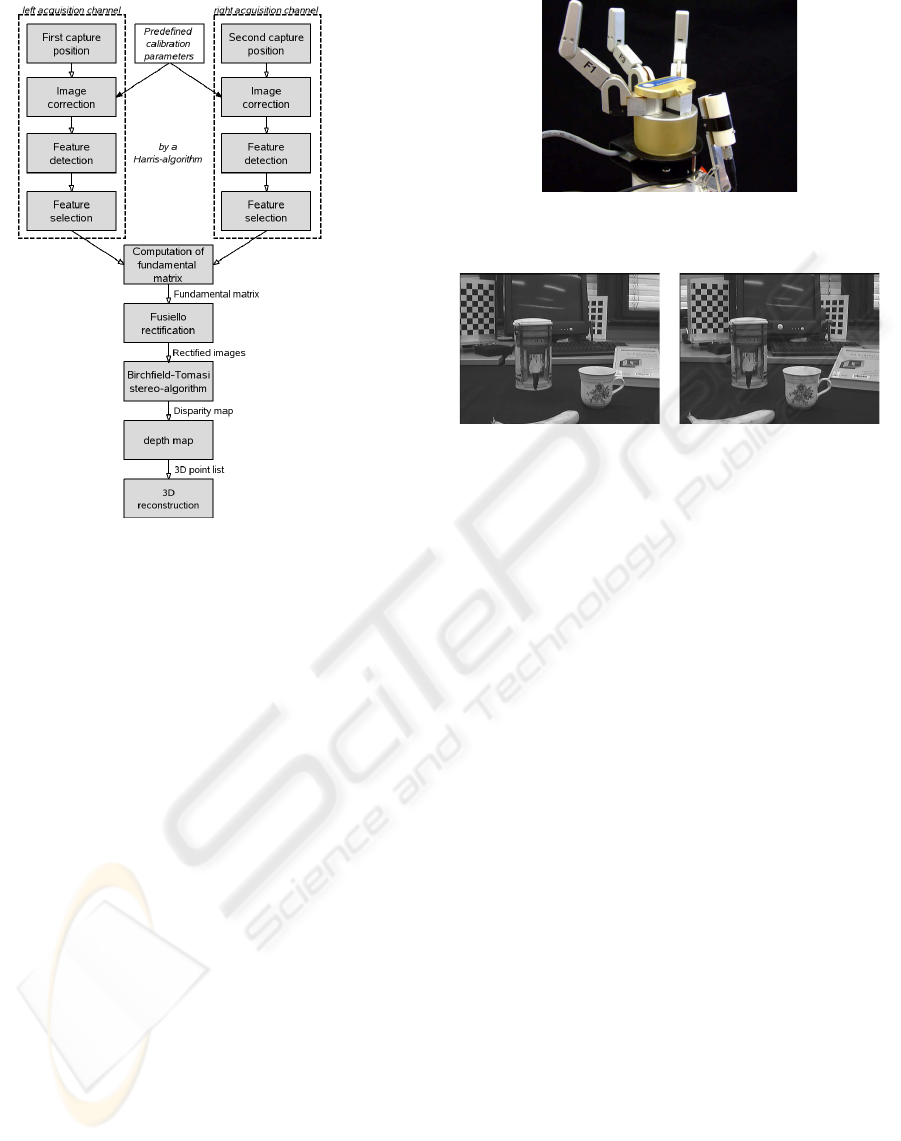
Figure 2: Simplified flow-chart of our 3D reconstruction
system.
hand-camera is mounted on the manipulator in a rigid
fixation tube (the white tube on the right of Fig. 3).
We normally do not need to change the focus since
we set it to infinity. Thus the predetermination of
calibration coefficients is the easiest way to deal the
next steps. For our purpose, it does not requiere to
use structure from motion and online calibration tech-
niques like Pollefeys presented in (Pollefeys, 1999).
This process is shown in the flowchart only by its re-
sulting calibration parameters.
IMAGE ACQUISITION AND CORRECTION
This paragraph describes the first two states of
the reconstruction system together. The images of a
daily table scenario are take by the mikro-head hand-
camera mounted on the robot-arm. This setup en-
ables a higly flexible image acquisition system within
a cruising radius of approximatly 1000mm in all di-
rections. Hence images can be aquired only by arm
movements without moving the whole robot plat-
tform. This is one of the main advantages of using
a hand-camera.
Thereafter the distored input images are corrected
using the predetermined calibration coefficient.
FEATURE EXTRACTION
This task is done with an algorithm by Harris. The
Harris corner detector (Harris and Stephens, 1988) se-
lects a pixel as corner if its responce R (see Eq. 2) is
Figure 3: Micro-head camera (right) fix mounted at manip-
ulator base.
Figure 4: Input images at both camera position A (left) and
B (right) with suitable orientation downwards and towards
each other.
an 8-way maximum.
K = detM − k(traceM)
2
(2)
M =
I
2
u
I
uv
I
uv
I
2
v
(3)
where det(M) = I
2
u
I
2
v
− I
2
uv
and trace(M) = I
2
u
+ I
2
v
.
Matrix M (3) is a covariance matrix with intensity val-
ues I for each pixel. Variable k is a weighting factor
that was chosen to 0.04 by Harris. The image coor-
dinates of extracted corners of both images then are
passed to the next processing stages.
EPIPOLAR GEOMETRY
To compute the fundamental matrix one of three
methods can be used. This options are possible due
to the consequent software technical encapsulation.
All other methods of the reconstruction system are ex-
changeable as well. The user can select wheter to use
RANSAC - RANdom SAmpling Consensus - (Fis-
chler and Bolles, 1981), LMedS - Least Median of
Squares - (Rousseeuw and Leroy, 1987) or 8-point al-
gorithm (Longuet-Higgins, 1981). By doing the latter
the user has to select few corresponding points of the
set of previously proposed corners.
For this variety of methods the Intel Open CV li-
brary is used. However, it figured out that the pro-
vided LMedS and RANSAC method does not work
very reliable yet.
THREE-DIMENISONAL MONOCULAR SCENE RECONSTRUCTION FOR SERVICE-ROBOTS - An Application
43

Figure 5: 2.5 dimensional depth map. The darker a pixel
the farer away from camera.
RECTIFICATION
Fusiello et al. presented a robust, compact and
easily reproducible algorithm that takes both per-
spective projection matrices of the original cameras
to compute a pair of rectifying projection matrices
(Fusiello et al., 2000). This matrices applied to the
corrected input images leads to rectified views of our
desk scene. The positions of the camera centers stays
the same, whereas the orientation (the same for both
cameras) differs from the old ones by suitable rota-
tions. In contrast to Fusiello we are using one and
the same camera at two spatial-temporal varying po-
sitions to acquire images without changing zoom and
focus. Thus we use the same intrinsic camera matrix
for both camera matrices described by Fusiello, only
differ in their orientation.
STEREO ALGORITHM
Birchfield and Tomasi designed a fast and accu-
rate stereo algorithm (Birchfield and Tomasi, 1996).
It matches individual pixels in corresponding scan-
line pairs while allowing occluded pixels to remain
unmatched. Espacially the latter is a main problem
for conventional pixel and feature based algorithms,
e.g. normalized cross-correlation, sum of squared dif-
ferences and sum of absolute differences. Moreover
Birchfields algorithm performs better results for ho-
mogeneous regions while using a measure of pixel
dissimilarity that is insensitiv to image sampling. The
disparity of corresponding pixels in two views is spec-
ified by the brightness of a pixel in a depth map (Fig.
5). The brighter a pixel the nearer to the camera.
Birchfields algorithm uses a cost function
1
(Eq. 4)
that measures how unlikely it is that a sequence S de-
scribes the true correspondence.
γ(S) = N
occ
κ
occ
− N
s
κ
r
+
N
s
∑
i=1
d(u
1
, u
2
) (4)
where κ
r
is a constant match reward of sequence s,
1
The cost function is justified solely by empirical evi-
dence (Birchfield and Tomasi, 1996).
Figure 6: Two virtual views of the reconstructed 3D model
based on precomputed disparity map.
κ
occ
a constant occlusion penalty of s, N
occ
and N
s
are
the number of occlusions and matches and d(u
1
, u
2
)
is the dissimilarity between pixels of both images at
same scanline.
The stereo algorithm is not that time-consuming
and computational expensive as classical methods
that normally compares the similarity of frames of
size N ×N around pixels to determine their correspon-
dance.
Birchfield provides a very fast stereo algorithm
that deals large homogeneous regions very well too.
These kind of regions often occure in environments
of robots.
3D MODEL
Eq. 5 is used to compute the 3D coordinate of a
pixel u, v. Therefore a pixel of the left image with
known focal length through the calibration process is
multiplied by a fraction of baseline b by disparity d.
x
c
y
c
z
c
=
b
d
u
l
v
l
f
(5)
The disparity can be obtained from the depth map
whereas the baseline is computed by the joint angles
of the robot-arm. During acquisition process the arm
pose is controlled via a homogeneous transformation
T = noap
3×4
. The baseline for the second image is
added to T by choosing T
b
= n
b
o
b
a
b
p
b
3×4
. Whereas
n
b
o
b
a
b
is set to identity I
3×3
and p
b
= (0, y, 0)
T
as the
corresponding baseline. The second position is then
defined as T
0
= T T
b
. Since we can translate the ma-
nipulator in camera coordinates (respectivelly to op-
tical center) and the joints has a very well resolution
we acquire good results for the baseline.
Fig. 6 shows the resulting three dimensional
model. For displaying OpenGL is used and the 3D
points are textured its original gray value of the left
image.
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
44
4 EXPERIMANTAL RESULTS
To validate the quality of our computation and to find
a proper baseline we have done experiments. We
placed six almost planar objects orthogonal at known
distances to our camera setup. Then two images were
recorded in a parallel orientation and vertical dis-
placement. One of two input images for a test cy-
cle with its resulting depth images is shown in Fig. 7.
We repeated this experiment seven times with varying
baselines to determine which baseline obtains best re-
sults in final reconstruction process for scenes from
800cm up to 2200cm. The results are shown in Fig.
8.
Figure 7: Left image of the experimental setup (left) and as-
sociated disparity map to determine optimal baseline offset.
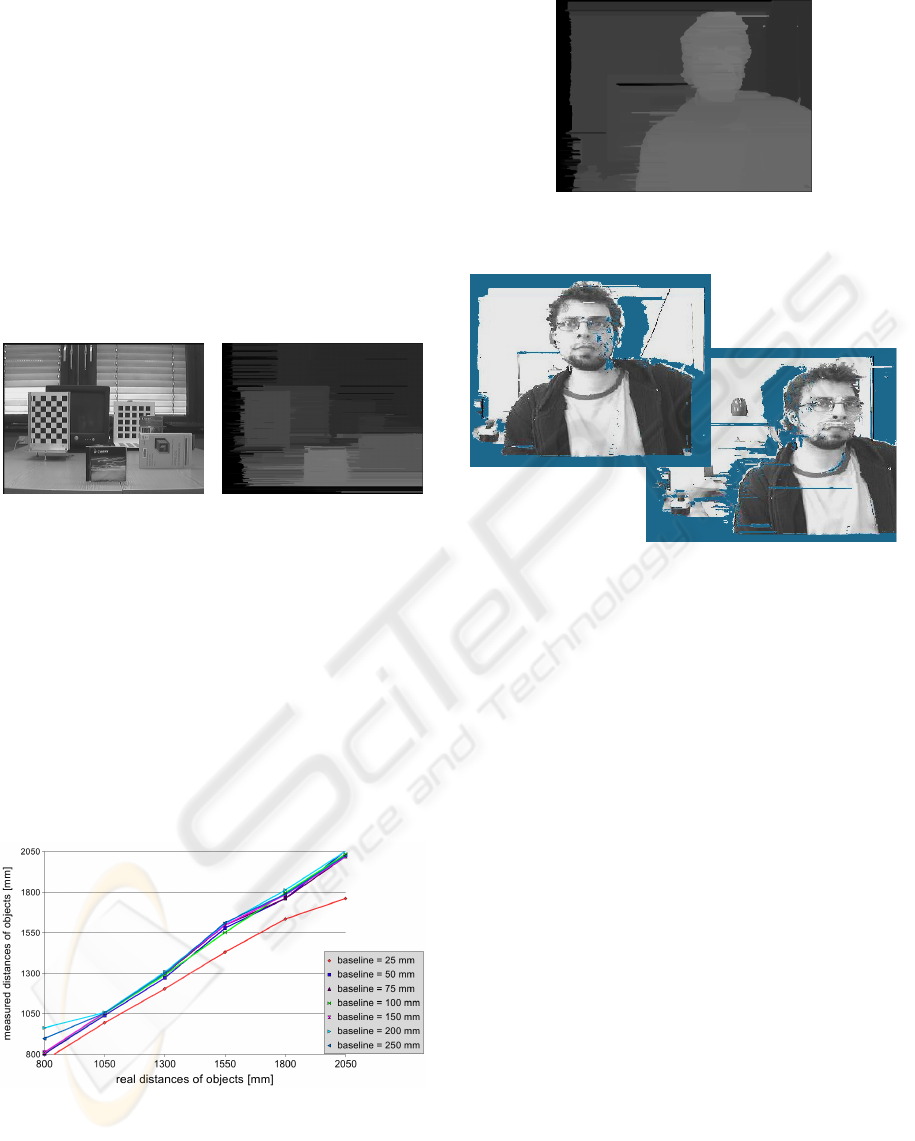
The graph visualizes the relationship between real
measured (abscissa) and computed distances by our
reconstruction system (ordinate). As seen a small
baseline leads to bad results. The reason is that the
disparity resolution is very small and hence offers a
rough depth reconstruction. If the baseline rises be-
yond 200mm the disparity resolution is appropriate
but the depth images are cluttered. This happens due
to problems with birchfields algorithm to find corre-
sponding pixels at large disparities.
Figure 8: Comparison of real measured depth values (ab-
scissa) to the measured results (ordinate) of our reconstruc-
tion system.
Within a baseline of 75mm til 150mm subjectively
the images are bearable concerning cluttering and dis-
parity resolution. Hence we choose a baseline of
Figure 9: 2.5 dimensional depth map of a face. The darker
a pixel the farer away from camera.
Figure 10: Two virtual views of a reconstructed face based
on the disparity map of Fig. 9.
100mm as suitable for the reconstruction task of desk
scenes.
Moreover, tests shown that our reconstruction sys-
tems is able to deal with large laboratory rooms. But
the baseline has to be larger than for desk scenarios.
Unfortunately the results are not as well as for the de-
veloped desk reconstruction tasks. Furthermore it can
be used to do proper 3D face reconstructions. Results
for a tentatively face reconstruction are shown in Fig.
9 & 10.
5 CONCLUSION AND FUTURE
WORK
By the use of a hand-camera we achieved a very flex-
ible system for free image acqusition without moving
the robot plattform. To vary the baseline during ac-
quisition is manageable easily. This is a big advan-
tage in small and tight environments to adapt to pre-
vailing circumstances easily. Furthermore no robot
components will cause occlusions as it will be with
the stereo-rig at the top of TASER.
The usage of Open CV supported and optimized
algorithms yields to good performance and leave
sufficient resources available for other basic robotic
THREE-DIMENISONAL MONOCULAR SCENE RECONSTRUCTION FOR SERVICE-ROBOTS - An Application
45

tasks. Birchfields dynamic stereo correspondance is
an appropriate solution concerning the results to its
performance.
Adding more viewpoints to capture a real world
scenario will lead to improved three dimensional
models and will help reduceing occluded regions.
Determining the next-bext-view described by Chen
(Chen and Li, 2004) will keep the number of images
needed for adequate reconstruction as small as pos-
sible. Based on full three dimensional models we
will proceed with collision detection algorithms for
robotarm interaction, e.g. grasping and manipulation,
in three dimensional space. Furthermore we want to
merge the reconstruction system with a computation
of optimal object grasps presented by Baier (Baier
and Zhang, 2006) .
REFERENCES
Baier, T., Hueser, M., Westhoff, D., and Zhang, J. (2006). A
flexible software architecture for multi-modal service
robots. In Multiconference on Computational Engi-
neering in Systems Applications (CESA).
Baier, T. and Zhang, J. (2006). Reusability-based semantics
for grasp evaluation in context of service robotics. In
IEEE International Conference on Robotics and Bio-
mimetics (ROBIO 2006), Kunming, China.
Birchfield, S. and Tomasi, C. (1996). Depth discontinuities
by pixel-to-pixel stereo. Technical report STAN-CS-
TR-96-1573, Stanford University.
Birchfield, S. and Tomasi, C. (1998). Depth discontinuities
by pixel-to-pixel stereo. In Proceedings of the Sixth
International Conference on Computer Vision, pages
1073–1080, Bombay, India.
Boykov, Y., Veksler, O., and Zabih, R. (1999). Fast ap-
proximate energy minimization via graph cuts. In In-
ternational Conference on Computer Vision (ICCV),
volume 1, pages 377–384.
Chen, S. Y. and Li, Y. F. (2004). Automatic sensor place-
ment for model-based robot vision. In IEEE Transac-
tions on Systems, Man and Cybernetics, Part B: Cy-
bernetics, volume 34, pages 393–408. IEEE Systems,
Man, and Cybernetics Society.
Faugeras, O. (1993). Three-dimensional computer vision:
a geometric viewpoint. MIT Press, Cambridge, MA,
USA.
Fischler, M. A. and Bolles, R. C. (1981). Random sample
consensus: a paradigm for model fitting with appli-
cations to image analysis and automated cartography.
Commun. Assoc. Comp. Mach., 24(6):381–395.
Fusiello, A., Trucco, E., and Verri, A. (2000). A compact
algorithm for rectification of stereo pairs. Machine
Vision and Applications, 12(1):16–22.
Harris, C. and Stephens, M. (1988). A combined corner
and edge detector. In Fourth Alvey Vision Conference,
pages 147–151.
Hartley, R. I. (1999). Theory and practice of projective rec-
tification. volume 35, pages 115–127. Kluwer Acad-
emic Publishers, Hingham, MA, USA.
Hartley, R. I. and Zisserman, A. (2003). Multiple View
Geometry in Computer Vision. Camebridge Univer-
sity Press.
Intel, C. (2005). Open CV 0.9.7.
http://www.intel.com/research/mrl/research/opencv/.
Longuet-Higgins, H.-C. (1981). A computer algorithm for
reconstructing a scene from two projections. Nature,
293:133–135.
Ma, Y., Soatto, S., Kosecka, J., and Sastry, S. S. (2004). An
Invitation to 3-D Vision: From Images to Geometric
Models. Springer, Berlin, Heidelberg.
Pollefeys, M. (1999). Self-Calibration and Metric 3D
Reconstruction from Uncalibrated Image Sequences.
Ph.d. thesis, ESAT-PSI, Katholieke Universiteit Leu-
ven.
Pollefeys, M., Koch, R., Vergauwen, M., and Gool, L. V.
(2000). Automated reconstruction of 3d scenes from
sequences of images. ISPRS Journal Of Photogram-
metry And Remote Sensing, 55:251–267.
Rousseeuw, P. J. and Leroy, A. M. (1987). Robust regres-
sion and outlier detection. Wiley, New York.
Trucco, E. and Verri, A. (1998). Introductory Techniques
for 3–D Computer Vision. Prentice Hall, New York.
Tsai, R. Y. (1986). An efficient and accurate camera calibra-
tion technique for 3d machine vision. In International
Conference on Computer Vision and Pattern Recogni-
tion, pages 364–374, Miami Beach, Fla. IEEE, IEEE
Computer Society Press.
Zhang, Z. (1998). A flexible new technique for camera cal-
ibration. Technical report MSR-TR-98-71, Microsoft
Research.
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
46
