
A REAL-TIME TRACKING SYSTEM COMBINING
TEMPLATE-BASED AND FEATURE-BASED APPROACHES
Alexander Ladikos, Selim Benhimane and Nassir Navab
Department of Computer Science, Technical University of Munich, Boltzmannstr. 3 , 85748 Garching, Germany
Keywords:
Real-Time Vision, Model-Based Object Tracking, Feature-based Tracking, Template-based Tracking.
Abstract:
In this paper we propose a complete real-time model-based tracking system for piecewise-planar objects which
combines template-based and feature-based approaches. Our contributions are an extension to the ESM algo-
rithm (Benhimane and Malis, 2004) used for template-based tracking and the formulation of a feature-based
tracking approach, which is specifically tailored for use in a real-time setting. In order to cope with highly
dynamic scenarios, such as illumination changes, partial occlusions and fast object movement, the system
adaptively switches between the template-based tracking, the feature-based tracking and a global initializa-
tion phase. Our tracking system achieves real-time performance by applying a coarse-to-fine optimization
approach and includes means to detect a loss of track.
1 INTRODUCTION
Tracking lays the foundation for many application
areas, including Augmented Reality, visual servo-
ing and vision-based industrial applications. Conse-
quently, there is a huge amount of related publica-
tions. The methods used for real-time 3D-tracking
can be roughly divided into four categories: Line-
based tracking, template-based tracking, feature-
based tracking and hybrid approaches.
Line-based tracking requires a line model of the
tracked object. The pose is determined by matching
a projection of the line model to the lines extracted
in the image. One of the first publications in this
field was (Bouthemy, 1989). Recently a real-time line
tracking system which uses multiple-hypothesis line
tracking was proposed in (Wuest et al., 2005). The
main disadvantage of line tracking is that it has severe
problems with background clutter and image blurring
so that in practice it cannot be applied in the applica-
tions we are targeting.
Template-based tracking fits better into our scenarios.
It uses a reference template of the object and tracks it
using image differences. This works nicely for well-
textured objects and small interframe displacements.
One of the first publications on template-based track-
ing (Lucas and Kanade, 1981) was using the optical
flow in order to recover the translations in the image
plane of the tracked objects. In order to improve the
efficiency of the tracking and to deal with more com-
plex objects and/or camera motions, other approaches
were proposed (Hager and Belhumeur, 1998; Baker
et al., 2001). In (Baker and Matthews, 2001) the au-
thors compare these approaches and show that they
all have an equivalent convergence rate and frequency
up to a first order approximation with some being
more efficient than others. A more recently sug-
gested approach is the Efficient Second Order Min-
imization (ESM) algorithm (Benhimane and Malis,
2004), whose main contribution consists in finding
a parametrization and an algorithm, which allow to
achieve second-order convergence at the computa-
tional cost and consequently the speed of first-order
methods.
Similarly to template-based tracking feature-based
approaches also require a well-textured object. They
work by extracting salient image regions from a ref-
erence image and matching them to another image.
Each single point in the reference image is compared
with other points belonging in a search region in the
other image. The one that gives the best similarity
measure score is considered as the corresponding one.
325
Ladikos A., Benhimane S. and Navab N. (2007).
A REAL-TIME TRACKING SYSTEM COMBINING TEMPLATE-BASED AND FEATURE-BASED APPROACHES.
In Proceedings of the Second International Conference on Computer Vision Theory and Applications - IU/MTSV, pages 325-332
Copyright
c
SciTePress

A common choice for feature extraction is the Harris
corner detector (Harris and Stephens, 1988). Features
can then be matched using normalized cross correla-
tion (NCC) or some other similarity measure (Zhang
et al., 1994). Two recent feature-matching approaches
are SIFT (Lowe, 2004) and Randomized Trees (Lep-
etit et al., 2005). Both perform equally well in terms
of accuracy. However, despite a recently proposed op-
timization of SIFT called SURF (Bay et al., 2006),
SIFT has a lower runtime performance than the Ran-
domized Trees, which exhibit a fast feature match-
ing thanks to an offline learning step. In comparison
to template-based methods, feature-based approaches
can deal with bigger interframe displacements and
can even be used for wide-baseline matching if we
consider the whole image as the search region. How-
ever, wide-baseline approaches are in general too
slow for real-time applications. Therefore they are
mostly used for initialization rather than tracking. A
full tracking system using only features was proposed
in (Vacchetti et al., 2004). They rely on registered
reference images of the object and perform feature
matching between reference image and current image
as well as between previous image and current im-
age to estimate the pose of the object. However, the
frame rate is not very high because of their complex
cost function. Moreover image blurring poses a prob-
lem for feature extraction.
Hybrid tracking approaches combine two or more
of the aforementioned approaches. Some recent re-
lated publications include (Pressigout and Marchand,
2005), which combines template-based tracking and
line-based tracking. In (Vacchetti et al., 2004) the au-
thors combine line-based tracking and feature-based
tracking. Even though these algorithms perform well,
the line-based tracking only improves the results for a
few cases and might corrupt the result in the case of
background clutter. In (Masson et al., 2004) the au-
thors use a template-based method for tracking small
patches on the object, which are then used for a point-
based pose estimation. Since this approach uses a
template-based method for tracking it cannot deal
with fast object motion.
Our proposed system combines template-based and
feature-based tracking approaches. The template-
based tracking is used as the default tracking since it
handles small interframe displacements, image blur
and linear illumination changes well. In our sys-
tem we adopt an extended version of the ESM al-
gorithm, due to its high convergence rate and ac-
curacy. For larger interframe displacements, which
cannot be handled by the template-based algorithm,
we use a feature-based approach making use of Har-
ris points and NCC. We decided against using both
feature-based and template-based tracking at the same
time in a combined cost function, since features do
not add any precision for small displacements and
for big displacements the gradient direction given by
ESM is usually erroneous. A combined approach
also increases the computational burden, which not
only slows down the tracker but also increases the in-
terframe displacement. For the (re-)initialization we
use Randomized Trees, because of their good runtime
performance.
The rest of the paper is structured as follows: Section
2 introduces the theoretical background used in our
system and section 3 describes our system design. In
section 4 we present some simulations with ground-
truth and some real-world experimental results. We
conclude with section 5.
2 THEORETICAL BACKGROUND
Every (4 × 4) matrix T defining a 3D rigid body
transformation is an element of the special Euclidean
group SE(3). Moreover the Lie-Algebra se(3) is
linked to SE(3) through the exponential map. The
base elements of se(3) can be chosen as follows:
A
1
=
0 b
x
0 0
A
4
=
[b
x
]
×
0
0 0
A
2
=
0 b
y
0 0
A
5
=
[b
y
]
×
0
0 0
A
3
=
0 b
z
0 0
A
6
=
[b
z
]
×
0
0 0
with b
x
= [1 0 0]
>
, b
y
= [0 1 0]
>
and b
z
= [0 0 1]
>
.
The matrices A
1
, A
2
, A
3
generate the translations and
A
4
, A
5
, A
6
generate the rotations. Consequently, we
can parameterize a transformation matrix:
T =
R t
0 1
∈ SE(3)
where R is the rotation and t is the translation, using
the parameter vector that consists of the coefficients
for each base element. Hence given a coefficient vec-
tor x = [x
1
, x
2
, ..., x
6
]
>
the corresponding transforma-
tion matrix T is obtained as:
T(x) = exp(
6
∑
i=1
x
i
A
i
) (1)
In our system we also make heavy use of the relation
between the movement of a plane in 3D and its move-
ment in the image, since we suppose that every object
can be considered as piecewise planar. As shown in
(Hartley and Zisserman, 2004) every plane movement
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
326
induces a homography. Let the plane be π = [n d]
>
with normal n and distance d from the camera. Then
the homography describing the transformation of the
imaged plane is given by:
H(T) = K
R −
tn
>
d
K
−1
(2)
where K are the intrinsic parameters of the camera.
The basic cost function used for template-based track-
ing is defined as follows: Let I
∗
be the reference
image and I the current image. Further let p be the
pixel coordinates of the pixels in the reference image
and
b
T an initial pose estimate for the current image.
Our goal is to estimate an incremental pose update
T(x) with x the parameter vector encoding rotation
and translation. Let w be the warping function. The
cost function is then given as:
f (x) =
∑
p
h
I
w
H
b
TT(x)
(p)
− I
∗
(p)
i
2
(3)
Due to the virtues of the parametrization it is possi-
ble to only evaluate a Jacobian, which depends on
the reference image and the current image, and still
achieve second order convergence (Benhimane and
Malis, 2004).
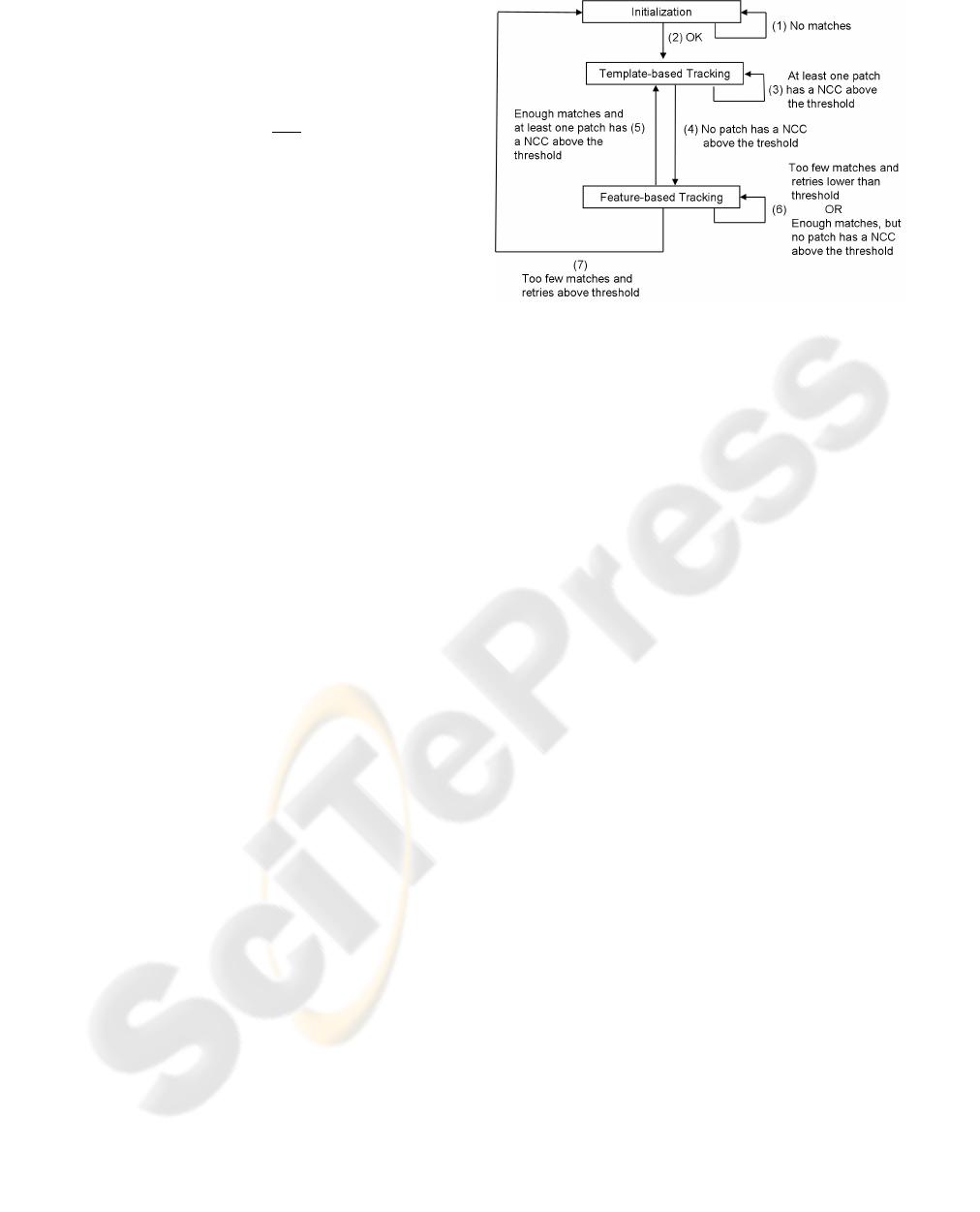
3 PROPOSED SYSTEM
An overview of the proposed system as a finite state
machine (FSM) is given in Figure 1.
The system starts with an initialization phase, which
will be described in section 3.2. It then uses the
template-based tracking algorithm to track the object
as explained in section 3.3. In the event that template-
based tracking fails the feature-based tracking, as de-
scribed in section 3.4, is used. If the feature-based
tracker is unable to recover the pose within a certain
number of attempts the initialization is invoked again.
Section 3.5 describes the transitions of the FSM and
the reasoning behind them.
3.1 Required Information
In our system we use a textured 3D model of the
object. This model can either be created manually
or semi-automatically with commercially available
products. One point to note is that it is advisable
to use the same camera for texturing the model and
for tracking, because this minimizes difficulties due
to different image quality and image formation con-
ditions.
For the initialization registered images of the object,
Figure 1: Overview of the proposed tracking system.
called keyframes, are required. They can be created
directly from the textured model by rendering it from
different views.
If the real-world metric pose is required, the correct
intrinsic camera parameters have to be provided.
3.2 Initialization
Initialization is performed using Randomized Trees.
The Randomized Trees algorithm requires a reference
image of the object in order to learn the appearance of
the feature points. When initializing, features are ex-
tracted from the current image and matched to the fea-
tures extracted in the keyframe. The pose can then be
estimated from the 3D object points and correspond-
ing 2D feature points in the current image.
Since the tracker is using a textured model of the ob-
ject the accuracy of the initial pose estimation is not
very critical. If on the other hand the reference tem-
plates used for tracking were extracted from the cur-
rent image, the precision of the initialization proce-
dure would be a major issue, because the quality of
the tracking result depends directly on the quality of
the templates used for tracking. Hence we decided
to directly use the templates taken from the textured
model in our system.
3.3 Template-based Tracking
We use the ESM algorithm for template-based track-
ing. The object is tracked using this method until a
loss of track is detected, in which case the feature-
based tracker is invoked.
3.3.1 Reference Patch Extraction
The textures of the reference patches, which are re-
quired for tracking, are taken from the textured model.
A REAL-TIME TRACKING SYSTEM COMBINING TEMPLATE-BASED AND FEATURE-BASED APPROACHES
327

For each patch the object is rendered so that the patch
is oriented parallel to the image plane. It is also im-
portant to ensure that the relative sizes of the ob-
ject patches are reflected in the size of the rendered
patches, since the number of pixels in a patch is di-
rectly proportional to its importance during tracking.
Since the pose parameters used to render the patches
are known, the reference patches can be directly ex-
tracted from the rendered image. After this for every
patch k the following information is available: The
reference patch I
∗
k
, the pose
e
T
k
under which it was
extracted, the patch normal n
k
and its distance to the
camera d
k
. These reference patches are then reduced a
few times in size by a factor of two to create a stack of
reference patches at different scales, which are used to
speed up the tracking in a coarse-to-fine approach.
3.3.2 Visibility Test
Attempting to track patches which are not visible
will lead to erroneous results. Hence it is necessary
to ascertain the visibility of every patch. This test
is performed by rendering the model with OpenGL
and using the occlusion query extension to test which
patches are visible and which are occluded. The visi-
bility test is performed for each frame using the pose
estimated in the previous frame. Thanks to the oc-
clusion query extension the visibility test can be per-
formed very fast, so that it does not interfere with the
tracking performance.
3.3.3 The Extended Esm Algorithm
We extended the formulation of the ESM algorithm as
given in section 2. This extension is required since in
the original formulation it is implicitly assumed that
all reference patches come from the same image, i.e.
they were extracted in the same coordinate system.
However, this is not possible when using the rendered
patches, since each patch is seen under a different
pose. For instance the front and back face of a cube
can not be seen at the same time. Hence it would be
impossible to track all the patches in the same coor-
dinate system. This would mean that each patch had
to be tracked independently without considering the
constraints imposed by the object geometry. To over-
come this problem the pose
e
T
k
under which the refer-
ence patch was extracted has to be incorporated into
the algorithm. This leads to the modified cost func-
tion:
f (x) =
∑
k
∑
p
k
h
I
w
H
b
TT(x)
e
T
−1
k
(p
k
)
− I
∗
(p
k
)
i
2
(4)
In order to speed up the optimization, we start at
the highest scale level (lowest resolution) and opti-
mize the cost function on this level until convergence
is achieved or until the maximum number of itera-
tions has been exceeded. If the optimization con-
verges before the maximum number of iterations has
been reached it is restarted on the next scale level with
the pose estimated on the previous level. This is con-
tinued until the lowest scale level (highest resolution)
is reached or the maximum number of iterations is ex-
ceeded.
3.3.4 Loss Of Track
Determining when the tracker lost the object is im-
portant in order to switch to the feature-based track-
ing algorithm. In our system this is accomplished
by computing the normalized cross correlation (NCC)
between the reference patch I
∗
k
and the current patch
I
k
after the end of the optimization for all visible
patches. The NCC between two patches is defined
as:
NCC(I
∗
k
, I
k
) =
∑
p
k
(I
∗
k
(p
k
) −µ
∗
k
)(I
k
(p
k
) −µ
k
)
N
2
k
σ
∗
k
σ
k
(5)
where N
k
is the number of pixels of each patch, µ
∗
k
and
µ
k
are the mean pixels intensities and σ
∗
k
and σ
k
their
standard deviations.
If the NCC of a patch falls below a certain threshold,
it is excluded from the tracking. If all the patches
fall below the threshold the feature-based tracker is
invoked.
3.4 Feature-based Tracking
In the event that the template-based tracker fails, the
feature-based tracker is invoked. For our feature-
based tracking approach we extract Harris cor-
ner points on the same reference patches used for
the template-based tracking and subsequently match
them to the current patch (i.e. the patch as seen in the
current image) using NCC. Because NCC is not scale
and rotation invariant a method had to be devised to
ensure that the two patches will be seen under almost
identical poses.
This is achieved as follows: Since the pose
e
T
k
un-
der which the reference patch k and hence the feature
points were extracted is known, it is possible to de-
termine the homography by which the current image
has to be warped to obtain the reference patch. How-
ever since the object pose in the current image is not
known, the pose
b
T recovered in the previous frame is
used as an approximation. Hence the current image
has to be warped with the homography:
H =
H(
b
T
e
T
−1
k
)
−1
(6)
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
328

Since the warping uses the pose from the previous
frame the warped patch will not look exactly like the
reference patch, but supposing reasonable constraints
on the maximum speed of the object, it is safe to as-
sume that the deformations will only be minor so that
NCC can still be used as a similarity measure. The
feature points are then extracted in the warped patch.
Let the matched points in the reference image and
the current image be p
k,i
and p
0
k,i
respectively. First
outliers are removed using RANSAC (Fischler and
Bolles, 1981). Then the pose is estimated by mini-
mizing the cost function:
f (x) =
∑
k
∑
i
kw
H
b
TT(x)
e
T
−1
k
(p
k,i
) −p
0
k,i
k
2
(7)
The parametrization is identical to that used in the
template-based algorithm. Since RANSAC was al-
ready applied to remove the outliers there is no need
to use a robust cost function, so a simple least-squares
approach suffices.
Using the warped patches for the matching is advan-
tageous for several reasons. First it allows the use
of NCC for matching instead of a more expensive
affine-invariant matching algorithm. Secondly it re-
duces the computational time for feature extraction,
because it is only necessary to extract Harris points on
the warped patch and not on the whole image. A fur-
ther advantage is that this approach removes matching
ambiguities in the case that multiple patches have the
same texture, since by considering the previous pose
only the correct patch will be used for the matching.
3.5 Finite State Machine
To decide which algorithm to use for a given frame
we designed a finite state machine (cf. figure 1).
The system starts out in the initialization phase and
stays in this phase until the the object is found in
the image (transition (1)). Once the object has been
found we switch to the template-based tracking phase
(transition (2)). The reason for starting with template-
based tracking rather than with feature-based tracking
is the higher accuracy and the higher frame rate, since
it is possible to use a coarse-to-fine optimization ap-
proach. As long as there is at least one patch left that
has a NCC higher than the threshold the template-
based tracker will be used (transition (3)).
When the NCC score of all patches falls below a
certain threshold the system switches to the feature-
based tracker (transition (4)), because otherwise the
tracking would diverge. An important issue is choos-
ing a good threshold for the NCC. We found that a
value between 0.5 and 0.7 gives the best results. For
lower values the system looses track, while for higher
values the feature-based approach is used most of the
time, even though the template-based tracker would
be faster.
Even in the feature-based tracking phase the NCC be-
tween the reference patches and the current patches is
computed. If there are enough feature matches to de-
termine the pose, the system goes back to template-
based tracking (transition (5)) unless there are no
patches with a NCC above the threshold. In this case
the system continues to use features (transition (6))
until at least one patch has a NCC above the threshold.
If the pose cannot be recovered in the current frame
the feature-based tracker is given another chance on
the next few frames (transition (6)). The reason for
this is that the object might just have been blurred in
the current frame because of too fast motion, which
makes both template-based tracking and feature ex-
traction difficult. Often, however, the object slows
down after a few frames, so that the feature-based
tracker can find it again. If the object still cannot be
found after a certain number of frames have been seen
the initialization is invoked again (transition (7)).
4 EXPERIMENTS
To evaluate the validity of our approach we performed
several experiments on synthetic data with ground-
truth and real data.
The frame rate of our system is in the range between
25 fps and 40 fps on a 1.66 GHz Intel Core-Duo CPU
with 1 GB of memory. The exact value depends on
a multitude of factors including the size of the refer-
ence patches, the number of scale levels, the number
of feature points and the desired accuracy.
The synthetic experiments consisted of creating an
animation with a textured 3D model and comparing
the recovered pose parameters to the actual ones. Fig-
ure 2 shows the ground-truth motion of one sequence
with 170 and one sequence with 200 frames. There
are big rotations, fast object movement and big scale
changes present in both sequences. The range of the
rotations is 120 degrees and the range of the transla-
tions is around 40 cm. Figure 3 and figure 4 show the
absolute translation and rotation errors for the first se-
quence and second sequence respectively. All meth-
ods have a very small error of normally less than 3
degrees for the rotations and 4 mm for the transla-
tions. In the first sequence the extended ESM al-
gorithm looses track at frame 162 (see figure 3(a))
due to fast object translation along the x-axis (see fig-
ure 2(a)). The feature-based algorithm already looses
track much earlier at frame 31 (see figure 3(b)), be-
cause it cannot find any feature matches when the
A REAL-TIME TRACKING SYSTEM COMBINING TEMPLATE-BASED AND FEATURE-BASED APPROACHES
329



object is seen at an oblique angle. In the second
sequence the feature-based algorithm performs bet-
ter than the extended ESM algorithm (see figure 4).
However neither algorithm can track the whole se-
quence. Our tracking approach on the other hand
successfully tracks both sequences entirely, because it
changes the tracking algorithm used at the right mo-
ment. We obtained similar results on all synthetic
sequences we simulated. Since there are no blur-
ring, illumination changes or noise in the synthetic
sequences it is not possible to show how our system
deals with these conditions. Therefore we also per-
formed many real-world experiments using different
objects.
Figure 5 shows some experiments on real sequences
made with a tea box and a candy box under vary-
ing tracking conditions. The images show how our
system deals with partial occlusions (b,d,f,g,j), illu-
mination changes (c), changes in scale (b,g,i,h) and
severely oblique viewing angles (k,l). This shows that
the proposed algorithm is able to deal with dynamic
scenarios and solve the major limitations of classical
tracking algorithms such as partial occlusions, illu-
mination changes and fast object movement. We can
also see that it is possible to robustly overlay virtual
objects in order to perform Augmented Reality.
5 CONCLUSION
We presented a tracking system which intelligently
combines template-based and feature-based tracking.
The contributions are the extension of the ESM al-
gorithm, the formulation of the feature-based track-
ing and the FSM for deciding which algorithm to use
for the current frame. The system has been tested on
real-world sequences as well as on simulations and
performs at high frame rates on a standard PC.
Compared to other algorithms proposed in the litera-
ture we achieve a higher frame rate and more robust-
ness to fast object motions. Our approach also gives
good results in the face of partial occlusions and illu-
mination changes.
REFERENCES
Baker, S., Dellaert, F., and Matthews, I. (2001). Aligning
images incrementally backwards. Technical report,
Robotics Institute, Carnegie Mellon University.
Baker, S. and Matthews, I. (2001). Equivalence and effi-
ciency of image alignment algorithms. In IEEE Int.
Conf. on Computer Vision and Pattern Recognition,
pages 1090–1097.
Bay, H., Tuytelaars, T., and van Gool, L. (2006). SURF:
Speeded up robust features. European Conference on
Computer Vision.
Benhimane, S. and Malis, E. (2004). Real-time image-
based tracking of planes using efficient second-order
minimization. In IEEE/RSJ Int. Conf. on Intelligent
Robots Systems, pages 943–948.
Bouthemy, P. (1989). A maximum likelihood framework
for determining moving edges. IEEE Trans. Pattern
Anal. Mach. Intell., 11(5):499–511.
Fischler, M. and Bolles, R. (1981). Random sample consen-
sus: A paradigm for model fitting with applications to
image analysis and automated cartography. Commu-
nications of the ACM, 24(6):381–395.
Hager, G. and Belhumeur, P. (1998). Efficient region track-
ing with parametric models of geometry and illumina-
tion. IEEE Trans. on Pattern Analysis and Machine
Intelligence, 20(10):1025–1039.
Harris, C. and Stephens, M. (1988). A combined corner and
edge detector. In Proceedings of the 4th Alvey Vision
Conf., pages 147–151.
Hartley, R. I. and Zisserman, A. (2004). Multiple View Ge-
ometry in Computer Vision. Cambridge University
Press, second edition.
Lepetit, V., Lagger, P., and Fua, P. (2005). Randomized
trees for real-time keypoint recognition. In IEEE Int.
Conf. on Computer Vision and Pattern Recognition,
pages 775–781.
Lowe, D. (2004). Distinctive image features from scale-
invariant keypoints. International Journal of Com-
puter Vision, 60(2):91–110.
Lucas, B. and Kanade, T. (1981). An iterative image regis-
tration technique with application to stereo vision. In
Int. Joint Conf. on Artificial Intelligence, pages 674–
679.
Masson, L., Dhome, M., and Jurie, F. (2004). Robust real
time tracking of 3d objects. In Int. Conf. on Pattern
Recognition, pages 252–255.
Pressigout, M. and Marchand, E. (2005). Real-time planar
structure tracking for visual servoing: a contour and
texture approach. In IEEE/RSJ Int. Conf. on Intelli-
gent Robots and Systems.
Vacchetti, L., Lepetit, V., and Fua, P. (2004). Combin-
ing edge and texture information for real-time accu-
rate 3d camera tracking. In Proceedings of the Third
IEEE and ACM International Symposium on Mixed
and Augmented Reality, pages 48–57.
Wuest, H., Vial, F., and Stricker, D. (2005). Adaptive line
tracking with multiple hypotheses for augmented re-
ality. In Proceedings of the Fourth IEEE and ACM In-
ternational Symposium on Mixed and Augmented Re-
ality, pages 62–69.
Zhang, Z., Deriche, R., Faugeras, O., and Luong, Q.-T.
(1994). A ro bust technique for matching two uncal-
ibrated images through the recovery of the unknown
epipolar geometry. Technical Report 2273, INRIA.
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
332
