
ENERGY MINIMIZATION APPROACH FOR ONLINE DATA
ASSOCIATION WITH MISSING DATA
Abir El Abed, S
´
everine Dubuisson and Dominique B
´
er
´
eziat
Laboratoire d’Informatique de Paris 6, Universit
´
e Pierre et Marie Curie
104 avenue du Pr
´
esident Kennedy, 75016 Paris, France
Keywords:
Online data association, energy minimization, prior informationless and non-rigid motion.
Abstract:
Data association problem is of crucial importance to improve online target tracking performance in many
difficult visual environments. Usually, association effectiveness is based on prior information and observation
category. However, some problems can arise when targets are quite similar. Therefore, neither the color
nor the shape could be helpful informations to achieve the task of data association. Likewise, problems can
also arise when tracking deformable targets, under the constraint of missing data, with complex motions. Such
restriction, i.e. the lack in prior information, limit the association performance. To remedy, we propose a novel
method for data association, inspired from the evolution of the target dynamic model, and based on a global
minimization of an energy vector. The main idea is to measure the absolute geometric accuracy between
features. Its parameterless constitutes the main advantage of our energy minimization approach. Only one
information, the position, is used as input to our algorithm. We have tested our approach on several sequences
to show its effectiveness.
1 INTRODUCTION
Traditionally, multiple object tracking deals with the
state estimation of moving targets. A track is a state
trajectory estimated from the available measurements
that have been associated with the same target (Ver-
maak et al., 2005). The main difficulty comes from
the assignment of a given measurement to a target
model. These assignments are generally unknown, as
are the true target models. The idea of data associa-
tion remains to find a partition of observations such
that each element is generated by a target, or clut-
ter, whose statistical properties differ from one tar-
get to another. The literature contains some classical
approaches: we can distinguish the deterministic ap-
proaches from the probabilistic ones.
Deterministic approaches select the best of several
candidate associations, without taking into account its
context correctness, by using a score function (Ver-
maak et al., 2005). The simplest deterministic method
for data association is the Nearest-Neighbor Standard
Filter (NNSF) (Rong and Bar-Shalom, 1996) that se-
lects the closest validate measurement to a predicted
target and uses it for its state estimation. Usually,
the distance measure used is the Mahalanobis one.
Since the filter does not take into account the pos-
sibility of incorrect associations, the performance of
this filter might be poor in some cases, resulting in an
incorrect association between measurements and tar-
gets. In some tracking applications, the color is also
exploited for the problem of data association. One
can measure the color histogram difference between
a measurement and the objects of the previous frame
using the histogram intersection technique. Unfortu-
nately, the color metric is not sufficient for a correct
data association in many cases: for deformable ob-
jects, which color distribution may differ from one
frame to another, or in case of several quite identi-
cal objects.
Probabilistic approaches are based on posterior prob-
ability and make an association decision using the
probability error (Rasmussen and Hager, 2001).
Among probabilistic approaches, we can cite the most
general one, called Multiple Hypothesis Tracking
(MHT) (Vermaak et al., 2005). In MHT, the multiple
hypotheses are formed and propagated, implying the
371
El Abed A., Dubuisson S. and Béréziat D. (2007).
ENERGY MINIMIZATION APPROACH FOR ONLINE DATA ASSOCIATION WITH MISSING DATA.
In Proceedings of the Second International Conference on Computer Vision Theory and Applications - IU/MTSV, pages 371-378
Copyright
c
SciTePress

calculation of every possible hypothesis. Due to the
exploring of a high-dimensional joint state space, this
method is computational intensive. Another strategy
for multiple target tracking association is the Prob-
ability Data Association Filter (PDAF) (Rasmussen
and Hager, 2001), that assigns an association proba-
bility to each measurement and uses these probabili-
ties to weight the measurements for track update. The
original PDAF formulation has some limitations: it
assumes that all measurements come from the track
being updated, that is not true in case of dense tar-
get conditions. The Joint Probability Data Associa-
tion (JPDA) (Fortmann et al., 1983) uses a weighted
sum of all measurements near the predicted state, each
weight corresponding to the posterior probability for
a measurement to come from a target. JPDAF pro-
vides an optimal data solution in the Bayesian frame-
work. However, the number of possible hypothesis
increases rapidly with the number of targets, requir-
ing prohibitive amount of time calculating.
Generally, an effective data association method is
based on prior information and observation category.
If we have a lack of prior information, that can hap-
pen when the observer has no information concern-
ing the system, the association task becomes difficult.
Such cases can occur when the observed system is de-
formable, moreover, when we observe, with minor in-
formation about the movement, multiple objects that
are quite similar even non distinguishable. It can be
more complicated if we have a considerable interval
of time between observations and if the observer has
no prior information about object’s motion. Likewise,
if we only observe target positions, we can face a mea-
surement that is equidistant from several targets: all
target association probabilities are relatively the same
and it is difficult to associate the good measurement
with the good target. As far as, no association method
can handle all the cases illustrated previously.
In this paper, we propose a novel method for data
association based on the minimization of an energy
magnitude k
~
Ek and adapted to the circumstances de-
scribed previously. This energy, inspired from tar-
get motion, measures the geometric accuracy between
features and associates the measurement y (given by
sensor) with the target k if k(
~
E
k
)
y
k is minimized. The
main advantages of this energy are followed. It does
not require parameters or prior knowledge and is not
a time-consumer. Exclusively one information about
targets is used: positions. Besides, it can handle
the problem of association when a measurement falls
within the validation region for several targets and is
equidistant from them.
The outline of this paper is as follows. In Section 2,
we expose our energy minimization approach, de-
rive its geometrical representation and its mathemat-
ical model. The proposed method is then evaluated
and tested on several sequences in Section 3. Finally,
concluding remarks and perspective are given in Sec-
tion 4.
2 ENERGY MINIMIZATION
APPROACH FOR DATA
ASSOCIATION
We first need to define some terms that will be often
used in this paper. We dispose a video sequence de-
scribing a dynamical scene. It is observed by a set
of sensors. Each observation contains at least one
measurement: a position. The number of available
measurements can differ from one observation to an-
other. Each measurement can be associated with a
specific object in the scene (i.e. target), or can be
a false alarm. At a specific time t, observations are
assumed to be available from N
obs
sensors. The set
of observations coming from all sensors is given by
y = (y
1
,...,y
N
obs
), where y
i
= (y
i
1
,...,y
i
M
i
) is the vector
containing the M
i
measurements coming from the i
th
sensor, also called observation. We suppose that each
sensor can generate at most one observation, contain-
ing at least one measurement at a particular time step
and that the number of measurements delivered by
the sensors varies with time. When an observation
is available, our goal is to associate a maximum one
measurement per target. The total number of targets
is K.
2.1 Energy Minimization Modelling
Generally, an effective data association method is
based on measurement category. When the measure-
ment is limited to a position, and falls inside the vali-
dation region of several targets and is equidistant from
them (see Figure 1.a), it will be associated with all
these targets if we use the NNSF or Monte Carlo
JPDAF approaches. As well as, in multiple target
tracking, feature targets can be quite similar. Accord-
ingly, even if information about their color distribu-
tion or shape is available, the association task is diffi-
cult under such assumptions or impossible in case of
complex dynamics.
In this paper, we propose an algorithm for data as-
sociation restricted to one category of measurement:
the position. Furthermore, we affirm the total lack of
prior information concerning targets: exclusively the
two anterior predicted positions are used. We will first
give the concept of our approach before starting its
mathematical modeling. Our intention is to formalize
a method able to associate a measurement according
to the restrictions displayed in Section 1. We define
a novel energy vector
~
E in the direct affine euclidean
space (O,
~
i,
~
j,
~
k). This energy is inspired from the tar-
get’s dynamic evolution. The dynamic model is de-
scribed in terms of displacements in the target space
(x,y). If we only consider the linear translation in one
direction, the problem of data association is limited to
the computation of the Mahalanobis distance energy
~
E
1
(see after for details). Thus, in case of complex dy-
namics such as non linear displacements, oscillatory
motions and non-constant velocities, we are vis-a-vis
a problem because
~
E
1
will be an insufficient infor-
mative source. To remedy, we incorporate a second
energy term
~
E
2
which measures the absolute accu-
racy between the dynamic features and indicates how
much their parameters are close. Moreover, we dis-
tinguish some dynamic cases, that will be clarified by
geometric descriptions afterward, for whose we need
to compensate
~
E
2
by the proximity energy evolution
~
E
3
for a better association of te available data.
The energy vector
~
E is only computed when the mea-
surement falls within several validation regions. We
consider a measurement as a clutter if it is not in-
cluded in any validation region. In our case, the val-
idation region is an ellipsoid that contains a given
probability mass under the Gaussian assumption. The
minor and major axes of this ellipsoid are respec-
tively given by the largest and smallest eigenvalues
of the covariance matrix, their directions are given by
the corresponding eigenvectors, and the center is the
mean of the target.
We define the energy vector between the k
th
target
(k = 1, . . . , K) and the measurement y
i
j
, i.e. j
th
mea-
surement of the i
th
sensor, by:
(
~
E
k
)
y
i
j
=
1
√
3
3
∑
l=1
α
l
(
~
E
l
k
)
y
i
j
(1)
where α
l
=
1
∑
K
k=1
||(
~
E
l
k
)
y
i
j
||
is a weighted factor intro-
duced to sensibly emphasize the relative importance
attached to the energy quantities
~
E
l
.
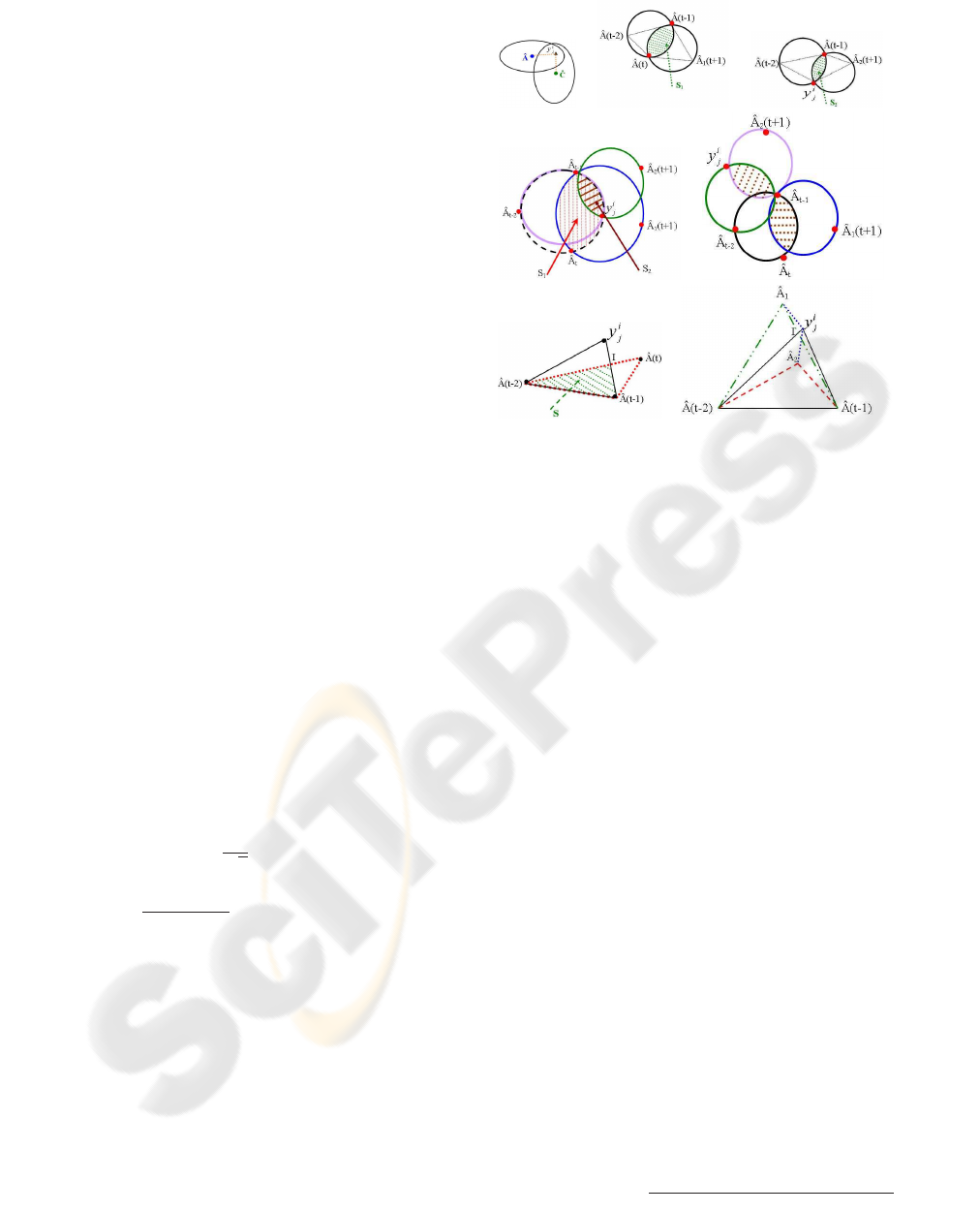
Before interpreting each energy, we consider a target
A and a measurement y
i
j
. Besides, we call (see Fig-
ure 1 for illustration):
•
ˆ
A(t −2),
ˆ
A(t −1),
ˆ
A(t) and
ˆ
A
1
(t + 1): prediction of A
at t −2, t −1, t and t + 1 by using the initial dynamic
model;
•
ˆ
A
2
(t + 1): prediction of A at t + 1 by using the updated
dynamic model. In this case, the measurement y
i
j
is as-
sociated with the target A at instant t and the parameters
of the dynamic model are updated according to y
i
j
.
(a) (b) (c)
(d) (e)
(f) (g)
Figure 1: (a) Measurement y
i
j
falls inside the two val-
idation regions of A and C; (b-c-f) Intersection surfaces
{S
1
,S
2
,S}; (d-e) Difference between the sufaces S
1
and
S
2
extracted from two dynamical models; (g) Intersection
surfaces where two predictions at instant t,
ˆ
A
1
and
ˆ
A
2
, are
equidistant from y
i
j
.
Prediction is based on the use of a dynamic model
which parameters are generally fixed by learning from
a training sequence to represent plausible motions
such as constant velocities or critically damped os-
cillations (North et al., 2000; Blake and Isard, 1998).
For complex dynamics, such as non-constant veloc-
ities or non-periodic oscillations, the choice of the
parameters for an estimation algorithm is difficult.
Furthermore, the learning step becomes particularly
more difficult in the case of missing data, because the
dynamic between two successive observations is un-
known. For these reasons, the parameters of our dy-
namic model are set in an adaptive and automated way
once a measurement is available (Abed et al., 2006).
The energy vector (
~
E
k
)
y
i
j
contains three components,
{
~
E
1
,
~
E
2
,
~
E
3
}, as defined below:
1. The Mahalanobis distance energy, (
~
E
1
k
)
y
i
j
, mea-
sures the distance between a measurement y
i
j
oc-
curred at instant t and the prediction of the target
A at t −1. This energy is sufficient to associate
the available measurement if the target’s motion
is limited to translations in one direction (case of
linear displacements). It is given by:
(
~
E
1
k
)
y
i
j
= k(
~
E
1
k
)
y
i
j
k
~
i (2)
=
q
(y
i
j
−
ˆ
A(t −1))
T
ˆ
Σ
−1
k
(y
i
j
−
ˆ
A(t −1))
~
i

where Σ
k
is the covariance matrix of the k
th
target
(we designe the k
th
target by A in the equation).
2. To consider the case of complex dynamics, such
as oscillatory motions or non-constant velocities,
we have added the absolute accuracy evolution
energy (
~
E
2
k
)
y
i
j
. It introduces the notion of the
geometric accuracy between two sets of features
whose dynamic evolution is different. The de-
scription of both models are followed:
• The updated dynamic model set considers that the
available measurement y
i
j
at t is generated by the
k
th
target and updates the parameters of its dynamic
model to predict the new state of the target k at t + 1;
• The not updated dynamic model set predicts the new
state at t + 1 without considering the presence of the
measurement, i.e. without updating the parameters
of the dynamic model.
(
~
E
2
k
)
y
i
j
extends a numerical estimation of the
closeness between two dynamic models. Our
idea aims to evaluate the parameters of the dy-
namic model in two cases if the measurement
y
i
j
arises from this target or no. We first pre-
dict the states
ˆ
A
1
(t + 1) and
ˆ
A
2
(t + 1) of the tar-
get at t + 1. We then determine S
1
, the intersec-
tion surface between the two circumscribed cir-
cles of the triangles (
ˆ
A(t −2),
ˆ
A(t −1),
ˆ
A(t)) and
(
ˆ
A(t −1),
ˆ
A(t),
ˆ
A
1
(t + 1)), and S
2
, the intersection
surface between the two circumscribed circles of
the triangles (
ˆ
A(t − 2),
ˆ
A(t − 1), y
i
j
) and (
ˆ
A(t −
1),y
i
j
,
ˆ
A
2
(t + 1)), (see Figures( 1.b-c)). (
~
E
2
k
)
y
i
j
is
minimized when the similarity between both dy-
namic models is maximized and is given by:
(
~
E
2
k
)
y
i
j
= k(
~
E
2
k
)
y
i
j
k
~
j = |S
1
−S
2
|
~
j (3)
We compare these two sets to measure the ratio of
similarity, defined by R
s
= 1−k(
~
E
2
k
)
y
i
j
k, between
the predictions at t + 1 given by two different dy-
namic models for target k. Increasing this ratio
maximizes the probability that the measurement
y
i
j
is generated by target k and the resemblance
between two dynamic models.
A question might be asked: is the component
~
E
2
able to handle all type of motions ?
Indeed,
~
E
2
evaluates a numerical measure of sim-
ilarity between dynamic models. This measure-
ment depends on the difference between two sur-
faces. It is considered as reliable if both positions,
ˆ
A(t) and y
i
j
, are on the same side comparing to
axis (
ˆ
A
t−2
ˆ
A
t−1
), see Figure 1.d. In Figure 1.e, we
show the case where both surfaces, S
1
and S
2
, are
quite similar, which imply
~
E
2
to be null. This case
can occur when the positions of
ˆ
A(t) and y
i
j
are
diametrically opposite or when their positions are
in different side comparing to axis (
ˆ
A
t−2
ˆ
A
t−1
). In
such cases, the energy
~
E
2
is not a sufficient infor-
mative source to achieve the task of association.
To compensate this energy, we then incorporate
the third energy
~
E
3
.
3. The proximity energy evolution, (
~
E
3
k
)
y
i
j
, is the in-
verse of the surface S defined by the common area
between the two triangles (
ˆ
A(t −2),
ˆ
A(t −1),y
i
j
)
and (
ˆ
A(t −2),
ˆ
A(t −1),
ˆ
A(t)) (see the dotted area
of Figure 1.f). This energy evaluates the abso-
lute accuracy between the prediction
ˆ
A(t) and the
measurement y
i
j
at instant t. Increasing S means
that the prediction and measurement at instant t
are close. This energy is given by:
(
~
E
3
k
)
y
i
j
= k(
~
E
3
k
)
y
i
j
k
~
k =
1
S
~
k (4)
Another question could be asked: why do we have
to use the intersection surface instead of only cal-
culating the distance between the measurement y
i
j
and the prediction of target’s position at instant t?
In Figure 1.g, we have two predictions at instant
t,
ˆ
A
1
and
ˆ
A
2
. They are both equidistant from the
measurement y
i
j
. If we only compute the distance
to measure the proximity energy, we will get that
both models have the same degree of similarity
with the initiation model defined by the dynamic
model of points (
ˆ
A(t −2),
ˆ
A(t −1),y
i
j
). This re-
sult leads to a contradiction with the reality. This
problem can be explained by the fact that if they
have both the same degree of similarity with the
third dynamic model, we can conclude that their
corresponding targets have the same dynamic. For
this reason, we have chosen to evaluate the sim-
ilarity by extracting the intersection surface be-
tween triangles. We can remark in Figure 1.g
that these intersection surfaces are very different,
which leads to a different measure in the degree
of similarity.
Finally, the measurement y
i
j
is associated with the tar-
get k if its energy magnitude is minimized:
Y
y
i
j
→k
=
min
k=1,...,K
(k(
~
E
k
)
y
i
j
k)
(5)
=
min
k=1,...,K
1
√
3
v
u
u
t
3
∑
l=1
α
2
l
k(
~
E
l
k
)
y
i
j
k
2
)
with 0 ≤ α
l
≤ 1 and 0 ≤ k(
~
E
k
)
y
i
j
k ≤ 1.
We have described a novel approach for data associ-
ation based on the minimization of an energy magni-
tude whose components are extracted from geomet-
rical representations (area and distance) constructed
with measurements, previous states and predictions.
The purpose of choosing a geometrical definition for
these energies refers to:
• show the geometrical continuity of the system between
predictions and previous states using two different dy-
namic models;
• measure the similarity between predictions, at a partic-
ular time for the same object, using two different dy-
namic models, that logically must be quite similar be-
cause they represent the same system.
3 EXPERIMENTAL RESULTS
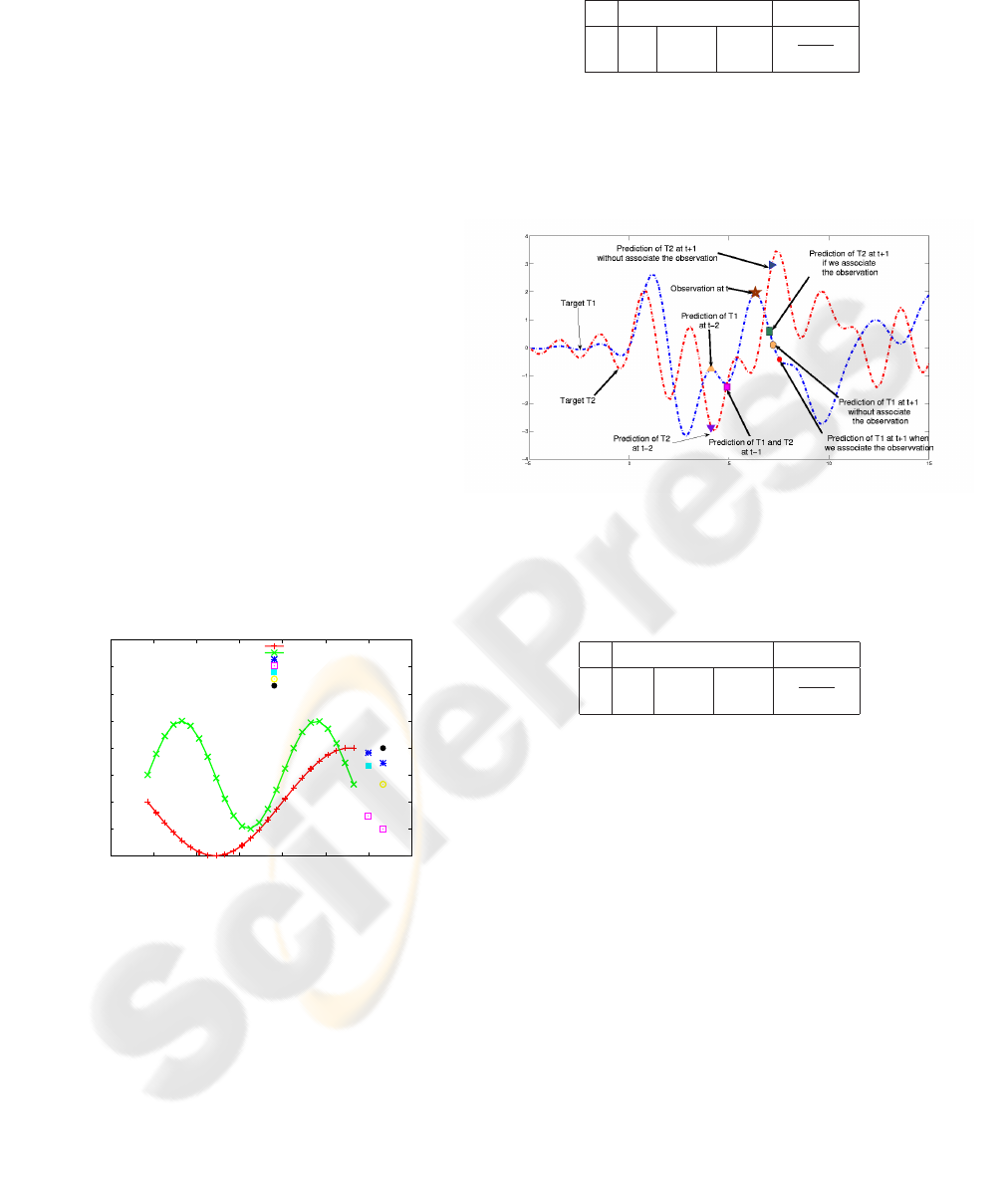
3.1 Synthetic Test
To expose the performance of our energy minimiza-
tion approach, we suggest the synthetic example of
Figure 2, which explores the case of an oscillatory
motion with a constant phase. It shows two targets T
1
and T
2
whose dynamic models are defined by two dif-
ferent sinusoids, sin(x) and sin(2x) + 0.5. The mea-
surement y (full square in Figure 2), is equidistant
from both targets and falls in their validation regions.
In such case, both targets are candidates to be associ-
ated with this measurement. We compute the energy
magnitude for each target (see Table 1) and obtain that
k(
~
E
1
)
y
k< k(
~
E
2
)
y
kand the measurement is associated
with T
1
.
-1
-0.5
0
0.5
1
1.5
2
2.5
3
-4 -3 -2 -1 0 1 2 3
T1
T2
Prediction without observation for T1
Prediction without observation for T2
Observation at instant t
Prediction with observation for T1
Prediction with observation for T2
Figure 2: Sinusoids with a constant phase: the dotted lines
represent the trajectories of targets T
1
and T
2
. The full
square is the measurement y. The dotted squares and blue
stars are the predictions of T
2
and T
1
at instants {t +1,t+2}
without taking into account the presence of the observation.
The dotted and full circles are the predictions of T
1
and T
2
if we consider that the observation is associated with both
targets.
We give another example where the motion of both
targets is given by a sinusoid with a non periodic
phase, see Figure 3. At instant t −1, both targets
have the same position as shown in Figure 3. If we
use the NNSF method, the measurement will be as-
sociated with both targets since it is equidistant from
Table 1: Energy magnitude computation for targets T
1
and
T
2
.
k α
i
k(
~
E
i
k
)
y
k k(
~
E
k
)
y
k
1 0.5 0.0001 0.4821 0.5278
2 0.5 0.9999 0.5179 0.9362
them. To improve the association result, we compute
the energy magnitude for each target and the results
are given in Table 2. We obtain k(
~
E
1
)
y
k < k(
~
E
2
)
y
k
and the measurement is associated with T
1
.
Figure 3: Sinusoids with non-constant phases: the dot-
ted lines represent the trajectories of targets; the shapes
(squares, circles, triangles) are their predictions at different
instants.
Table 2: Energy magnitude computation for T
1
and T
2
.
k α
i
k(
~
E
i
k
)
y
k k(
~
E
k
)
y
k
1 0.5 0.0970 0.3094 0.3441
2 0.5 0.9030 0.6906 0.7170
3.2 Van-Plane Test
In the following experiment, the available observa-
tion at instant t contains two measurements M
1
and
M
2
, each one represents a position in the target space
(x,y). The first row in Figure 4 contains the frames
at {t −2,t −1,t} where two targets {T
1
,T
2
}, the van
and the plane, are present. If we look at the position
of these measurements on the real frame at t (right
image in Figure 4), we observe that M
1
is closed to T
1
and M
2
to T
2
. In the second and third rows, we show
the predictions of both targets by evaluating two dif-
ferent dynamic models in the target space (x, y). We
point out that the horizontal and the vertical axis of the
frame are represented by the y-axis and x-axis in the
target space. We can remark that the distance from
T
1
to M
1
is larger than the one from T
1
to M
2
, see
the Mahalanobis distance energy α
1
k(
~
E
1
1
)
{M
1
,M
2
}
k in
Table 3. Hence, if we use the Nearest Neighbor as-
sociation method, the target T
1
will be associated to
M
2
which causes a contradiction with the reality. To
remedy, we compute the energies
~
E
2
and
~
E
3
which
compensate the insufficiency of
~
E
1
. Using the energy
minimization approach, we obtain that the energies
magnitudes are minimized when M
1
and M
2
are re-
spectively associated with targets T
1
and T
2
(see Ta-
ble 3).
Figure 4: Van Plane test. In the first row: left and middle
images represent the frames at {t −2,t −1} where two tar-
gets {T
1
,T
2
} are present; right image is the real frame at t.
The available observation at t contains two measurements
{M
1
,M
2
}. In the second and third rows, we show the posi-
tion of both targets at different instants.
Table 3: Energy magnitude computation for both tar-
gets when the measurements {M
1
,M
2
} are associated with
them.
k α
i
k(
~
E
i
k
)
M
1
k k(
~
E
k
)
M
1
k
1 0.3141 0.02 0.3429 0.2687
2 0.6858 0.98 0.6571 0.7879
k α
i
k(
~
E
i
k
)
M
2
k
k(
~
E
k
)
M
2
k
1 0.3179 0.7236 0.8636 0.6759
2 0.6821 0.2764 0.1364 0.4322
3.3 Walking Men Test
The ”Walking men” sequence shows: Figure 5.a three
men walking close at intant (t −2), Figure 5.b, at t −
1, two men (T
2
and T
3
) continue walking in the same
direction, while the third one (T
1
) takes the opposite
direction.
The available observation at t contains three measure-
ments corresponding to positions in the target space
a b
c d
Figure 5: Walking men test. (a) Frame at (t −2): three
walking men close one to the other; (b) Frame at t − 1:
two men continue walking in the same direction and the
third one takes the opposite direction; (c) The observation
at t: two men cross and we have a partial occlusion between
them; (d) Frame at t + 1: the cross men change their direc-
tions.
Table 4: Energy magnitude computation for targets k when
measurements M
i
are associated with them.
k α
i
k(
~
E
i
k
)
M
1
k k(
~
E
k
)
M
1
k
1 0.144 0.03 0 0.085
2 0.411 0.82 0 0.53
3 0.444 0.16 0 0.47
k α
i
k(
~
E
i
k
)
M
2
k
k(
~
E
k
)
M
2
k
1 0.70 0.16 0.5 0.51
2 0.15 0.22 0.5 0.32
3 0.15 0.62 0 0.37
k α
i
k(
~
E
i
k
)
M
3
k k(
~
E
k
)
M
3
k
1 0.63 0.0037 0 0.363
2 0.21 0.76 0 0.455
3 0.16 0.235 0 0.16
(x,y). In Figure 5.c, we show the corresponding
frame at instant t where we observe a partial occlu-
sion between two walking men. We have put the mea-
surements in Table 4 in a way that the measurement
M
i
is generated by the target T
i
. We notice that the
observed positions of the cross men are very close.
Figure 5.d represents the real frame at instant t + 1
where we remark that the cross men change their
directions. We remark from Table 4 that the mea-
surement M
2
is equidistant from targets T
2
and T
3
(α
2
k(
~
E
2
2
)
M
2
k= α
2
k(
~
E
2
3
)
M
2
k= 0.15). We also remark
from Table 4 that most of time the third energy is null,
this effect is due to the presence of a linear movement
(motion limited to a displacement in two directions
x and y). Once the energies are computed, we obtain
the energy magnitude k(
~
E
i
)kis minimized when mea-
surement M
i
is associated to target T
i
, see the column

of k(
~
E
k
)
M
i
k in Table 4. Despite the change in illumi-
nation, the measurements were correctly associated to
targets by using the approach of energy minimization.
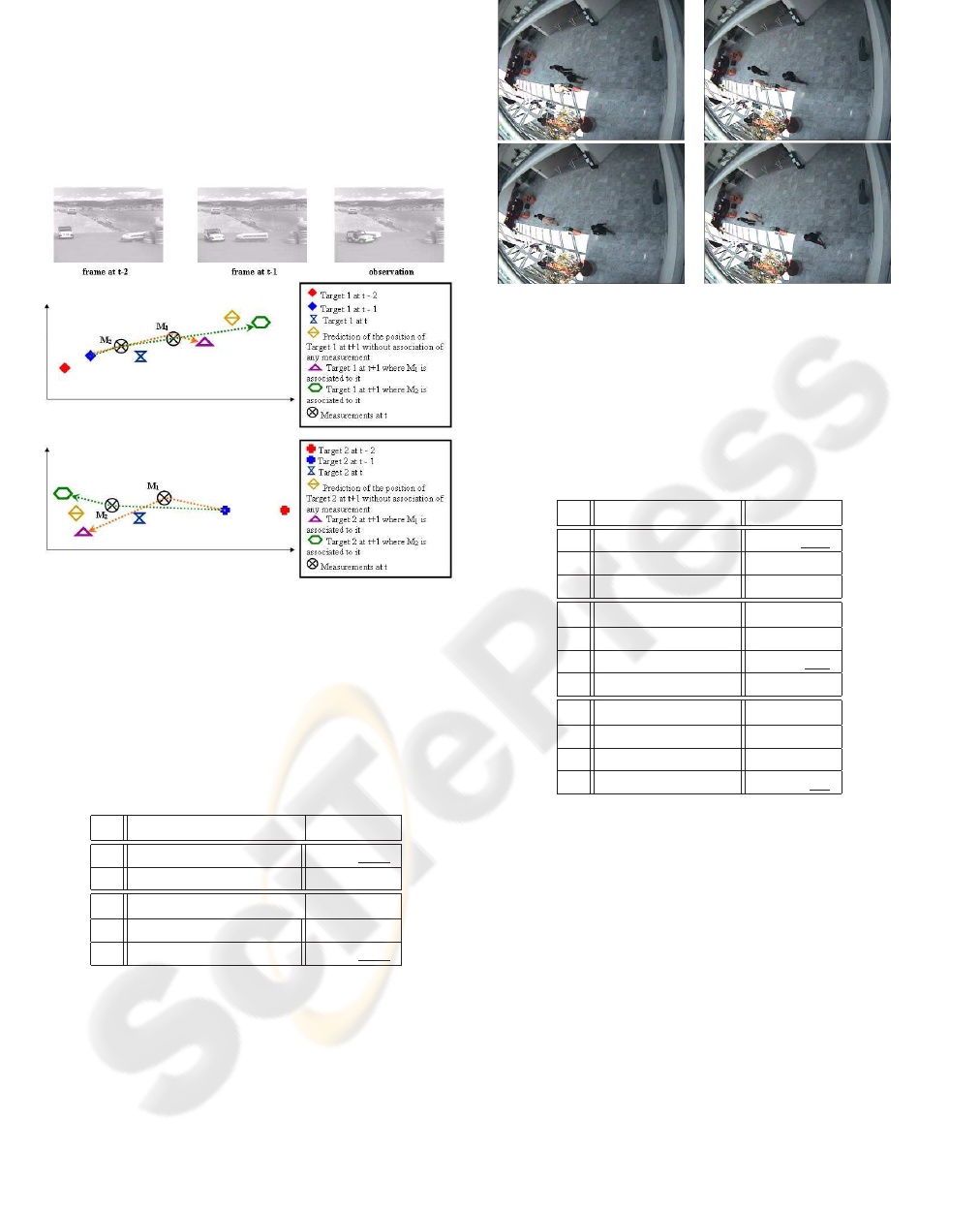
3.4 Window Men Test
In this sequence we observe, at instant t −2, two tar-
gets: the first one is static and the second undergoes a
linear movement (see Figure 6.a). At instant t −1,
only the second target continues walking and goes
near to the first one, Figure 6.b. At instant t, an ob-
servation containing two measurements, containing
positions, is available. Notice that the observed po-
sitions are close and there is a partial occlusion be-
tween both targets. Table 5 shows that the distance
from measurement M
2
to target T
1
is less than the dis-
tance from M
2
to T
2
, k(
~
E
1
1
)
M
2
k < k(
~
E
1
2
)
M
2
k, which
leads to a contradiction with the reality. We compute
the second energy to compensate the first one. The
third energy is null due to the linear displacement of
both targets. As we can remark from Table 5, the
energy magnitude k(
~
E
k
)
M
1
k and k(
~
E
k
)
M
2
k are mini-
mized when M
1
and M
2
are associated with T
1
and T
2
respectively. We remark that our approach of energy
minimization gives a correct association despite the
presence of a light reflexion on the window.
a b
c d
Figure 6: Window men test. (a) Frame at t −2: two targets
are present; (b) Frame at t −1: both targets are close; (c) the
available observation at t; (d) Frame at intant t: both targets
move.
Table 5: Energy magnitude computation for targets k when
measurements M
i
are associated with them.
k k(
~
E
i
k
)
M
1
k α
i
k(
~
E
i
k
)
M
1
k k(
~
E
k
)
M
1
k
1 0 0 0 0 0 0 0
2 0.0607 6.2 0 1 1 0 0.82
k k(
~
E
i
k
)
M
2
k α
i
k(
~
E
i
k
)
M
2
k k(
~
E
k
)
M
2
k
1 0.0217 0.36 0 0.3 0.83 0 0.51
2 0.0518 0.07 0 0.7 0.16 0 0.42
3.5 Ant Sequence Test
We have tested our method on another sequence
showing ants having complex motions. They move
with a non-constant velocity and can accelerate,
decelerate and sometimes stop moving or starting.
These ants are quite similar even non-distinguishable
and characterized by the same gray level distribu-
tion. The sensor, at instant t, provides an observa-
tion containing six measurements corresponding to
positions in the (x,y) space. In such scene, only
one information can be used: the motion. We re-
mark from Figure 7 that their displacement is erratic.
The ants change their direction, accelerate, deceler-
ate, stop moving, do rotation around their axis, etc.
Figure 7.(a-b) are the acquisitions at instant t −2 and
t−1 and represents the frames 10 and 25 of the ant se-
quence. We remark there is a considerable interval of
time between these two frames. We have labeled the
ants just to show their displacements from one frame
to another. Figure 7.c shows the available observation
at t and represents the frame 35 of the sequence. Fig-
ure 7.d is the real frame at t + 1. Table 6 contains the
numerical values of all energies computed between
measurements and targets. We have multiplied each
one by 100 to show clearly the difference between
them. We have also fixed the order of classification in
Table 6 so that the measurement M
i
is provided from
target T
i
. If we use the Nearest Neighbor filter to as-
sociate the available observations, the measurements
{M
2
,M
4
,M
5
}will be respectively associated with tar-
gets {T
4
,T
2
,T
2
} which leads to a contradiction with
the reality (see the energy α
1
k(
~
E
1
k
)
M
i
k in Table 6).
To remedy, we associate our observations by using
the energy minimization approach. We remark from
Table 6 that the energies α
2
k(
~
E
2
2
)
M
2
k < α
2
k(
~
E
2
4
)
M
2
k
and α
3
k(
~
E
3
2
)
M
2
k < α
3
k(
~
E
3
4
)
M
2
k which compensates
the error given by α
1
k(
~
E
1
2
)
M
2
k. Finally, the follow-
ing result is obtained: k(
~
E
k
)
M
2
k is minimized when
M
2
is associated with target T
2
. We recite that a mea-
surement is associated with a target if the magnitude
of its energy is minimal (equation 5). Lets take an-
other example to show the necessity of using the en-
ergy
~
E
3
in our formulation to compensate the oth-
ers one. If we only use the energies α
1
k(
~
E
1
k
)
M
i
k and
α
2
k(
~
E
2
k
)
M
i
k to associate data, we will get the follow-
ing result: k(
~
E
6
)
M
5
k < k(
~
E
5
)
M
5
k and the measure-
ment M
5
will be associated with target T
6
which leads
to an error in association. We can remark from Ta-
ble 6 that α
3
k(
~
E
3
5
)
M
5
k< α
3
k(
~
E
3
6
)
M
5
k which compen-
sate the other energies. Finally, we observe that each
measurement is well associated with its correspond-
ing target. We notice that our approach is not time-
consumer. The total time of computation of all these
energies is 0.25 seconds. We have used Matlab to im-
plement our method.

a b
c d
Figure 7: Ant sequence. Frames {10, 25, 35,45}. (a-b) Ac-
quisitions at t −2 and t −1; (c) Available observation at t;
(d) Frame at t + 1.
4 CONCLUSION
This work proposes a new method for data association
based on an energy minimization. The developed ap-
proach can handle complex motions and highly non-
linear systems, and deals with the lack of prior knowl-
edge. Its effectiveness returns to the fact it requires
few parameters. The geometric illustration of energy
components allows to measure the accuracy between
two dynamic models and to define their degree of
similarity. As a perspective, we suggest to integrate
the energy minimization approach within the classi-
cal particle filter to build a new framework for multi-
ple tracking objects. Moreover, since we consider er-
ratic motions that cannot be learned from training se-
quences, we suggest to use an adaptive and automated
way to set the parameters of the dynamic model of
the filter. The purpose of developing this framework
is to track targets under the restriction of the missing
of prior information and especially when similar tar-
gets are evolving in the scene. This phase is currently
under development.
REFERENCES
Abed, A. E., Dubuisson, S., and B
´
er
´
eziat, D. (2006). Com-
parison of statistical and shape-based approaches for
non-rigid motion tracking with missing data using a
particle filter. In Advanced Concepts for Intelligent
Vision Systems.
Blake, A. and Isard, M. (1998). Active contours. In
Springer-Verlag.
Fortmann, T., Bar-Shalom, Y., and Scheffe, M. (1983).
Sonar tracking of multiple targets using joint proba-
bilistic data association. In IEEE Journ. Oceanic En-
gineering.
North, B., Blake, A., Isard, M., and Rittscher, J. (2000).
Learning and classification of complex dynamics. In
IEEE Transactions on Pattern Analysis and Machine
Intelligence.
Rasmussen, C. and Hager, G. (2001). Probabilistic data
association methods for tracking complex visual ob-
jects. In IEEE Transactions on Pattern Analysis and
Machine Intelligence.
Rong, L. and Bar-Shalom, Y. (1996). Tracking in clut-
ter with nearest neighbor filter: analysis and perfor-
mance. In IEEE transactions on aerospace and elec-
tronic systems.
Vermaak, J., Godsill, S., and P
´
erez, P. (2005). Monte carlo
filtering for multi-target tracking and data association.
In IEEE Transactions on Aerospace and Electronic
Systems.
Table 6: First column and first row contain ant’s numbers
and measurement’s numbers. The energies magnitude are
multiplied by 100.
α
1
k(
~
E
1
k
)
M
i
k×100
1 2 3 4 5 6
1 6.512 47.239 25.761 43.975 48.705 46.618
2 22.545 5.762 21.381 6.498 2.510 12.014
3 15.105 24.891 4.043 17.747 23.748 19.693
4 21.447 1.728 21.604 9.403 5.444 10.209
5 18.317 6.094 17.943 12.191 9.276 5.953
6 16.074 13.549 9.268 10.923 10.318 5.513
α
2
k(
~
E
2
k
)
M
i
k×100
1 2 3 4 5 6
1 1.487 1.848 1.424 1.081 11.276 1.091
2 3.096 1.234 3.091 9.610 54.460 1.583
3 14.168 0.234 0.343 0.160 1.256 0.107
4 6.564 2.211 2.669 0.307 24.120 4.400
5 74.366 85.842 92.240 96.185 6.993 92.438
6 0.320 0.255 0.233 1.032 1.895 0.381
α
3
k(
~
E
3
k
)
M
i
k×100
1 2 3 4 5 6
1 0.037 45.813 0.792 14.091 48.144 43.240
2 6.801 0.014 24.593 0.225 14.570 13.635
3 22.205 8.488 1.783 5.637 4.657 24.499
4 38.757 14.837 27.829 0.708 17.822 12.073
5 8.457 10.537 12.624 3.231 4.048 6.203
6 23.743 20.101 32.380 76.319 10.759 0.350
k(
~
E
k
)
M
i
k×100
1 2 3 4 5 6
1 3.856 38.008 14.903 26.668 40.071 36.715
2 13.713 3.402 18.899 6.699 32.580 10.532
3 17.530 15.184 2.559 10.751 13.991 18.148
4 25.853 8.718 20.399 5.447 17.598 9.475
5 44.487 50.057 54.741 56.008 7.103 53.600
6 16.555 13.996 19.446 44.516 8.676 3.197
