
ROBUST APPEARANCE MATCHING WITH FILTERED
COMPONENT ANALYSIS
Fernando De la Torre, Alvaro Collet, Jeffrey F. Cohn and Takeo Kanade
Robotics Institute, Carnegie Mellon University, Pittsburgh, USA
Keywords:
Appearance Models, principal component analysis, Multi-band representation, learning filters.
Abstract:
Appearance Models (AM) are commonly used to model appearance and shape variation of objects in images.
In particular, they have proven useful to detection, tracking, and synthesis of people’s faces from video. While
AM have numerous advantages relative to alternative approaches, they have at least two important drawbacks.
First, they are especially prone to local minima in fitting; this problem becomes increasingly problematic as
the number of parameters to estimate grows. Second, often few if any of the local minima correspond to
the correct location of the model error. To address these problems, we propose Filtered Component Analysis
(FCA), an extension of traditional Principal Component Analysis (PCA). FCA learns an optimal set of filters
with which to build a multi-band representation of the object. FCA representations were found to be more
robust than either grayscale or Gabor filters to problems of local minima. The effectiveness and robustness of
the proposed algorithm is demonstrated in both synthetic and real data.
1 INTRODUCTION
Component Analysis (CA) methods such as Principal
Component Analysis (PCA) have been widely applied
in visual, graphics, and signal processing tasks over
the last two decades. PCA is a key learning compo-
nent of Appearance Models (AM). AM have proven
especially powerful for face tracking and synthesis
relative to alternative approaches (e.g. optical flow)
(Blanz and Vetter, 1999; Matthews and Baker, 2004;
Cootes and Taylor, 2001b; de la Torre and Black,
2003; Black and Jepson, 1998).
In applications such as face detection and track-
ing, the goal is to search for a minimum residual be-
tween the image and the model across rigid (e.g. ro-
tation and translation) and non-rigid parameters. For
instance, consider fig. 1, in which a face has been
placed in an arbitrary image. In fig. 1.a, we plot
the normalized correlation surface error between the
ideal template (face) and the image in a 40 ×40 patch
centered in the middle of the face. This surface error
has nice local properties: it has just one well defined
global minimum that corresponds to the expected lo-
cation of the face. However, if we learn a generic PCA
a) Normalized correlation
(ideal template)
FCA filter 1
FCA filter 2
FCA filter 3
PCA
c) Multiband FCAb) PCA with Grayscale
Training
PCA
Figure 1: a). Normalized correlation error surface of the
image with the face in a 40 ×40 patch. b) Error function
with a generic graylevel appearance model. The black dot
denotes the optimal position of the face. c) Error function
of a multiband learned representation. The location of the
face corresponds to the minimum of the function.
model of the facial appearance variation from training
data and try to locate the face again, two undesirable
effects may occur. First, the location of the optimal
207
De la Torre F., Collet A., F. Cohn J. and Kanade T. (2007).
ROBUST APPEARANCE MATCHING WITH FILTERED COMPONENT ANALYSIS.
In Proceedings of the Second International Conference on Computer Vision Theory and Applications - IFP/IA, pages 207-212
Copyright
c
SciTePress

parameter (translation) fails to correspond to the lo-
cation of the face (delineated by the the black dot in
the figure), see fig. (1.b). Second, many local minima
may be found. Even if a gradient descent algorithm
begins close to the correct solution, the occurrence of
local minima is likely to divert convergence from the
desired solution.
The aim of this paper is to explore the use of a new
technique, Filtered Component Analysis (FCA). FCA
learns a multiband representation of the image that re-
duces the number of local minima and improves gen-
eralization relative to PCA. Fig. (1.c) shows the main
goal of the paper. By building a multiband representa-
tion with FCA, we are able to locate the minimum in
the right location (black dot) and eliminate most local
minima close to the optimal one.
2 PREVIOUS WORK
This section reviews work on subspace tracking and
the role of representation in subspace analysis.
2.1 Subspace Detection and Tracking
Subspace trackers build the object’s appearance/shape
representation from the PCA of a set of training sam-
ples. Let d
i
∈ℜ
d×1
(see notation
1
) be the i sample of
a training set D ∈ ℜ
d×n
and B ∈ ℜ
d×k
the first k prin-
cipal components. B contains the directions of maxi-
mum variation of the data. The principal components
maximize max
B
∑
n
i=1
||B
T
d
i
||
2
2
= ||B
T
B||
F
, with the
constraint B
T
B = I. The columns of B form an ortho-
normal basis that spans the principal subspace. If the
effective rank of D is much less than d, we can ap-
proximate the column space of D with k << d princi-
pal components. The data d
i
can be approximated as
a linear combination of the principal components as
d
i
≈Bc
i
where c
i
= B
T
d
i
are the coefficients obtained
by projecting the training data onto the principal sub-
space.
Once the model has been learned (i.e. B is
known), tracking is achieved by finding the para-
meters a of the geometric transformation f(x, a) that
1
Bold capital letters denote a matrix D, bold lower-case
letters a column vector d. d
j
represents the j column of the
matrix D. d
i j
denotes the scalar in the row i and column
j of the matrix D and the scalar i-th element of a column
vector d
j
. All non-bold letters will represent variables of
scalar nature. ||x||
2
=
√
x
T
x designates Euclidean norm of
x. The vec(D) operator transforms D ∈ ℜ
d×n
into an dn-
dimensional vector by stacking the columns. ◦ denotes the
Hadamard or point-wise product. ⊗ denotes convolution.
1
k
∈ ℜ
k×1
is a vector of ones. I
k
∈ ℜ
k×k
is the identity.
aligns the data w.r.t. the subspace. Given an image d
i
,
subspace trackers or detectors find a and c
i
that min-
imize: min
c
i
,a
||d
i
(f(x, a)) −Bc
i
||
2
2
(or some normal-
ized error). In the case of an affine transformation,
f(x, a) =
a
1
a
2
+
a
3
a
4
a
5
a
6
x −x
c
y −y
c
where
a = (a
1
, a
2
, a
3
, a
4
, a
5
, a
6
) are the affine parameters and
x = (x
1
, y
1
, ···, x
n
, y
n
) is a vector containing the coor-
dinates of the pixels to track. If a = (a
1
, a
2
) is just
translation, the search can be done efficiently over
the whole image using the Fast Fourier Transform
(FFT). For a = (a
3
= a
6
, a
5
= a
4
), that is, for simi-
larity transformation, the search also can be done ef-
ficiently in the log-polar representation of the image
with the FFT.
2.2 Representation in Subspace
Analysis
Most work on AM uses some sort of normalized
graylevel to build the representation. However, re-
gions of graylevel values can suffer from large am-
biguities, camera noise, and changes in illumination.
More robust representation can be achieved by local
combination of pixels through filtering. Filtering of
the visual array is a key element of the primate visual
system (Rao and Ballard, 1995).
Representations for subspace recognition were ex-
plored by Bischof et al. (Bischof et al., 2004). In
the training stage, they built a subspace by filter-
ing the PCA-graylevel basis with steerable filters. In
the recognition phase, they filtered the test images
and performed robust matching, obtaining improved
recognition performance over graylevel. Cootes et. al
(Cootes and Taylor, 2001a) found that a non-linear
representation of edge structure could improve the
performance of model subspace matching and recog-
nition. De la Torre et al. (de la Torre et al., 2000)
found that subspace tracking was improved by using
a multiband representation created by filtering the im-
ages with a set of Gaussian filters and its derivatives.
Our work differs in several aspects from previous
work. First, we explicitly learn an optimal set of spa-
tial filters adapted to the object of interest rather than
using hand-picked ones. Once the filters are learned,
we build a multiband representation of the image that
has improved error surfaces with which to fit AM. We
evaluate quantitatively the properties of the error sur-
faces and show how FCA outperforms current meth-
ods in appearance based detection.
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
208

3 FILTERED COMPONENT
ANALYSIS
Many component analysis methods (PCA, LDA, etc)
build data models based on the second order statistics
(covariance matrices) of the signal. In particular, PCA
finds a linear transformation that decorrelates the data
by exploiting the correlation across samples. PCA
models the correlation across pixels of different im-
ages, but not the spatial statistics within each of the
images. In this section, we propose Filtered Compo-
nent Analysis (FCA) that learns a bank of orthogonal
filters that decorrelate the spatial statistics of a set of
images. Once the FCA filters are learned, we build a
multi-band representation that generalizes better and
is more robust to different types of noise.
3.1 Learning Spatial Correlation
Previous research (de la Torre et al., 2000; Bischof
et al., 2004; Cootes and Taylor, 2001a) has shown
the importance of representation in AM. However, re-
searchers have used hand-picked filters to represent
the signal. Instead, FCA will learn a set of orthog-
onal spatial filters optimal for variance preservation.
Variance preservation of image spatial statistics is a
realistic assumption to build a generative model for
detection or tracking appearance.
Given a set of training images, D
d×n
, our aim is
to model the spatial statistics of the signal by learning
the filter F that minimizes:
E
1
(F, µ
µ
µ) = min
F,µ
µ
µ
n
∑
i=1
||d
i
⊗F −µ
µ
µ||
2
2
(1)
Recall that ⊗ denotes convolution, and µ
µ
µ =
1
n
∑
n
i=1
d
i
⊗F is the mean of the filtered signal. If µ
µ
µ
is known, the optimal F can be achieved by solving:
Avec(F) = b A =
∑
n
i=1
∑
(x,y)
d
(x,y)
i
d
(x,y)
i
T
b =
∑
n
i=1
∑
(x,y)
µ
µ
µ
(x,y)
◦d
(x,y)
i
(2)
where (x, y) is the domain where the convolution is
valid and d
(x,y)
i
is a patch of the filter size ( f
x
, f
y
)
centered at the coordinates (x, y). The matrix A can
be computed efficiently in space or frequency from
the autocorrelation function of d
i
. Analogously, b is
estimated from the cross-correlation between d
i
and
µ
µ
µ. Alternatively, one could use the integral image
(Lewis, 1995) to efficiently compute eq. 2.
Without imposing any constraints on the filter co-
efficients, the optimal solution of eq. 1 is given by
µ
µ
µ = 0 and F = 0 (although an iterative algorithm will
rarely converge to this solution). To avoid this trivial
solution, we impose that the sum of squared coeffi-
cients is 1, i.e. vec(F)
T
vec(F) = 1. The latter con-
straint can be elegantly solved by noticing that the
convolution is a linear operator, and , eq. 2 can be
rewritten as:
E
2
(F) = min
F
n
∑
i=1
||(d
i
−µ
µ
µ
0
) ⊗F||
2
2
(3)
where µ
µ
µ
0
=
1
n
∑
n
i=1
d
i
is the sample mean. Now
Eq. 3 can be solved by finding the eigenvec-
tor with smallest eigenvalue of A =
∑
n
i=1
∑
(x,y)
(d
i
−
µ
µ
µ
0
)
(x,y)
(d
i
−µ
µ
µ
0
)
(x,y)
T
(see eq. 2).
3.2 Learning a Multiband
Representation
In this section, we will build a multiband represen-
tation of the signal that preserves most spatial corre-
lation among a given training set. In particular, we
will find a set of filters F
1, ···,F
that decorrelate the
spatial statistics of the image and are orthogonal to
each other. Observe that FCA is analogous to PCA
but now rather than decorrelating the signal with the
covariance of the data, we decorrelate the spatial sta-
tistics.
In our particular tracking application, we are inter-
ested in finding a set of filters that preserve the spatial
statistics of the object of interest and has minimal re-
sponse to background. This filter set can be obtained
by maximizing E
F CA
(F
1, ···,F
):
E
F CA
=
F
∑
f =1
n
∑
i=1
||d
i
⊗F
f
||
2
2
−λ
n
2
∑
j=1
||d
b
j
⊗F
f
||
2
2
(4)
where d
b
j
denotes the j
th
sample of the background.
Let T = [vec(F
1
) vec(F
2
) ··· vec(F
F
)] be a matrix
of all the vectorized filters, the filters should satisfy
T
T
T = I
F×F
. After making the derivatives with re-
spect to F
f
, it can be shown that the optimal solutions
satisfies the following eigenvalue problem:
max
F
1, ···,F
∑
f
i=1
||(A −λBα)vec(F
i
)||
2
2
(5)
A =
∑
n
i=1
∑
(x,y)
d
(x,y)
i
d
(x,y)
i
T
α =
max(A)
max(B)
B =
∑
n
2
j=1
∑
(x,y)
d
b
j
(x,y)
d
b
j
(x,y)
T
s.t. vec(F
i
)
T
vec(F
j
) = 0 ∀i 6= j and
vec(F
i
)
T
vec(F
i
) = 1 ∀i
If λ is large, the set of filters will predominantly can-
cel the background. If λ is small the filters will be
adapted to the object.With λ close to one the filters
will achieve trade-off between modeling the signal
(i.e object) and removing the background. Typically
ROBUST APPEARANCE MATCHING WITH FILTERED COMPONENT ANALYSIS
209

0 ≤ λ ≤ 2. α is an artificially introduced parameter
that normalizes the energies of A and B.
The solution of eq. 5 is given by the leading eigen-
vectors of (A −λαB). At this point, it is interesting to
consider again the analogy with PCA. PCA will find
the leading eigenvectors of
∑
n
i=1
d
i
d
T
i
whereas FCA
will find the leading eigenvectors (assuming λ = 0)
A =
∑
n
i=1
∑
(x,y)
d
(x,y)
i
d
(x,y)
i
T
. While PCA finds the di-
rections of maximum variation of the covariance ma-
trix, FCA finds the directions of maximum variation
of the sum of all overlapping patches.
Figure 2: a) Training images of faces and background. b)
FCA filters for λ = 0, λ = 1 and size 11 ×11.
Fig. (2.a) shows many examples of faces and
background patches. Fig.(2.b) shows the set of FCA
filters for λ = 0 and λ = 1 for size 11 ×11. Observe
that the first FCA filter is an average filter, and the
other filters are differential filters at different orienta-
tions and scales.
3.3 Multiband Subspace Detection
In subspace detection, PCA is computed from a set of
training images. After the training stage, the goal is to
detect the object of interest over different orientation,
scales and translations. If the scale and orientation is
known, dectection can be achieved finding the trans-
lational parameters a = (a
1
, a
2
) that minimize:
E
3
= min
c
i
,a
||d
i
(x + a) −Bc
i
||
2
2
||d
i
(x + a)||
2
2
(6)
Evaluating eq. 6 at each location (x, y) can be com-
putationally expensive. For a particular position (x, y)
computing the coefficients (i.e. c
i
) is equivalent to
correlating the image with each basis of subspace B,
and stacking all values for each pixel. For large re-
gions, this correlation is performed efficiently in the
frequency domain using the Fast Fourier Transform
(FFT) (i.e. C
1
= b
T
1
I = IFFT (FFT (b
1
) ◦FFT (I))).
Similarly, the local energy term, ||d
i
(x + a)||
2
2
, can
be computed efficiently using the convolution in the
space or frequency domain. Alternatively, these ex-
pressions can be computed efficiently using the inte-
gral image (Lewis, 1995).
In multiband tracking, we represent an image as
a concatenation of filtered images. For a particular
image d
i
and a set of filters (F
1
, ···, F
f
), there are
several ways to modify eq. 6:
E
4
=
∑
F
f =1
β
f
||d
i
⊗F
f
−B
f
c
i
||
2
2
||d
i
⊗F
f
||
2
2
(7)
E
5
=
∑
F
f =1
β
f
||d
i
⊗F
f
−B
f
c
f
i
||
2
2
||d
i
⊗F
f
||
2
2
(8)
Parameters β
f
are the eigenvalues of (A −λαB), ob-
tained by FCA. E
4
filters the training images and
builds PCA based on the set of stacked filtered im-
ages. E
5
computes an independent PCA for each rep-
resentation such that the coefficients for each image
are uncoupled (i.e. c
f
i
differs for each filter).
4 EXPERIMENTS
To test the validity of our approach, we have per-
formed several sets of experiments in face detection
and facial feature tracking. The first set of experi-
ments consists on detecting a face embedded in an
arbitrary image (see fig. 1) using a generic model. In
the second set, we test the ability of FCA to improve
tracking in Active Appearance Models (Cootes and
Taylor, 2001b; Blanz and Vetter, 1999; Matthews and
Baker, 2004; de la Torre et al., 2000).
In all experiments a generic face model was built
from 150 subjects from the IBM ViaVoice AV data-
base (Neti et al., 2000), after aligning the data with
Procrustes Analysis(Cootes and Taylor, 2001b). Once
the FCA filters are learned, a multi-band represen-
tation is built for each of the 150 images, and PCA
is computed retaining 80% of the total energy. For
comparison purposes, multi-band PCA is also done
for other representations (e.g. Gabor, graylevel and
derivatives. In the experiments, we consider Gabor
Filters because of the good results reported by other
researchers in the area. In addition, these filters have
been shown to possess optimal localization proper-
ties in both spatial and frequency domain and thus are
well suited for tracking problems.
4.1 Understanding FCA
In order to compute FCA 150 subjects are selected
randomly from the IBM database. We also extract
2000 random patches from several images of the IBM
that do not contain faces. Using these training sam-
ples, we learn FCA filters at 5 different scales (3 ×3,
5 ×5, 7 ×7, 9×9 and 11×11 pixels), using eq. 5 for
different λ values.
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
210
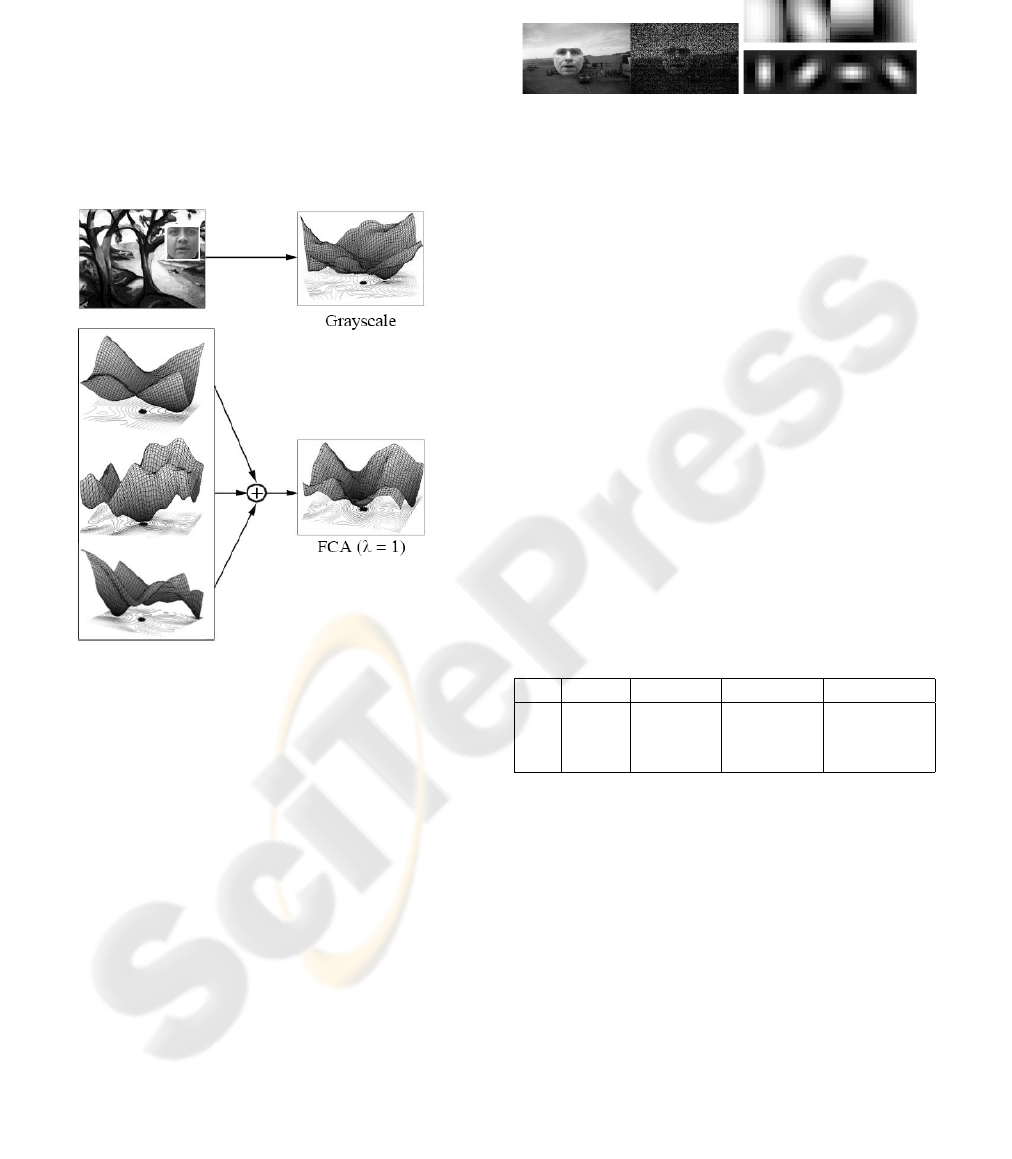
Given a new face image not present in the train-
ing set, we embedded it in a bigger background im-
age (see fig. 3). Then, we efficiently search over all
translations looking for a minimum of the subspace
model. Fig. 3 shows an example of the error surface
for each of the FCA bands, in comparison with the
error surfaces from normalized graylevel. As it can
be observed, Graylevel representation has several lo-
cal minima and the global minimum is misplaced. On
the other hand, the sum of the three FCA bands pro-
duces an error surface with a correctly-placed global
minimum.
Figure 3: Error surfaces for graylevel and each of the bands
for FCA.
4.2 Robustness to Noise/Illumination
This first experiment is designed to test the robust-
ness of FCA to noise and varying illumination condi-
tions. A subset of 100 subjects from the IBM data-
base (not in the training set) are randomly chosen and
embedded in background images. Then, random im-
pulsional noise is added (see fig. 4.a) and the error
in each location is efficiently computed (the orien-
tation and scale is known). To quantitatively com-
pare each filterbank, 3 different surface error statis-
tics have been calculated. Given a patch of 100 ×100
pixels around the optimal location of the face (which
is known beforehand), we compute the following sta-
tistics: 1) distance between the global minimum and
the face center, 2) distance between the correct mini-
mum and closest local minimum, 3) Amount of local
minima. The amount of local minima in an error sur-
face is calculated by counting those pixels with sign
change in x and y derivatives and positive values in
the second derivatives.
Figure 4: a) Original image and test image with added im-
pulsional noise. b) FCA(11,4) and Gabor (8,4).
Table 1 shows the average results for the described
error statistics for three representations: a set of four
11 ×11 pixels FCA filters (see fig. 4.a), the best-
performing 11 ×11 pixels Gabor filter (see fig. 4.b)
and the normalized graylevel. In all our experiments,
we report the results of the set of Gabor filters that
performs the best over several scales. A global mini-
mum is said to be correct if it falls within a region of
3 ×3 pixels around the theoretical minimum. All the
representations have similar accuracy; however, the
amount of local minima is very high in the grayscale,
and both grayscale and Gabor fail to provide a suffi-
ciently high global-closest minimum margin in com-
parison with FCA filters. These results are quite sta-
ble across spatial domains of the FCA filter sets and
have therefore been omitted in the interest of space.
Table 1: Experiments on noisy data. Statistics: (1) Per-
centage of correct global minimum. (2) distance between
correct and closest local minimum. (3) Average number of
local minima.
gray FCA
λ=0
FCA
λ=0.5
Gabor(8,4)
(1) 98 99 99 99
(2) 9.73 24.36 24.03 19.01
(3) 30.06 1.45 1.49 2.46
In the next experiment we test the robustness of
FCA to illumination changes. We take 4 images un-
der varying illumination conditions (see fig. 5) for 30
subjects from the PIE database(Sim et al., 2002) (to-
tal 120 images). We embedded this face into an image
and compute the error surfaces. Results from this ex-
periment can be seen in table 2. In this case, FCA
clearly outperforms any other technique in all three
statistics of the error function. The accuracy is higher
than grayscale and Gabor by 33% and 12% resp.,
while keeping the closest minimum 25.37% pixels
further away and the density of local minima is the
lowest one. It is worth noting that the best-performing
filters have been FCA
λ=0
(no background). Fig. 6
shows the error surface for a particular subject; as we
can observe, the properties of FCA are more desirable
ROBUST APPEARANCE MATCHING WITH FILTERED COMPONENT ANALYSIS
211
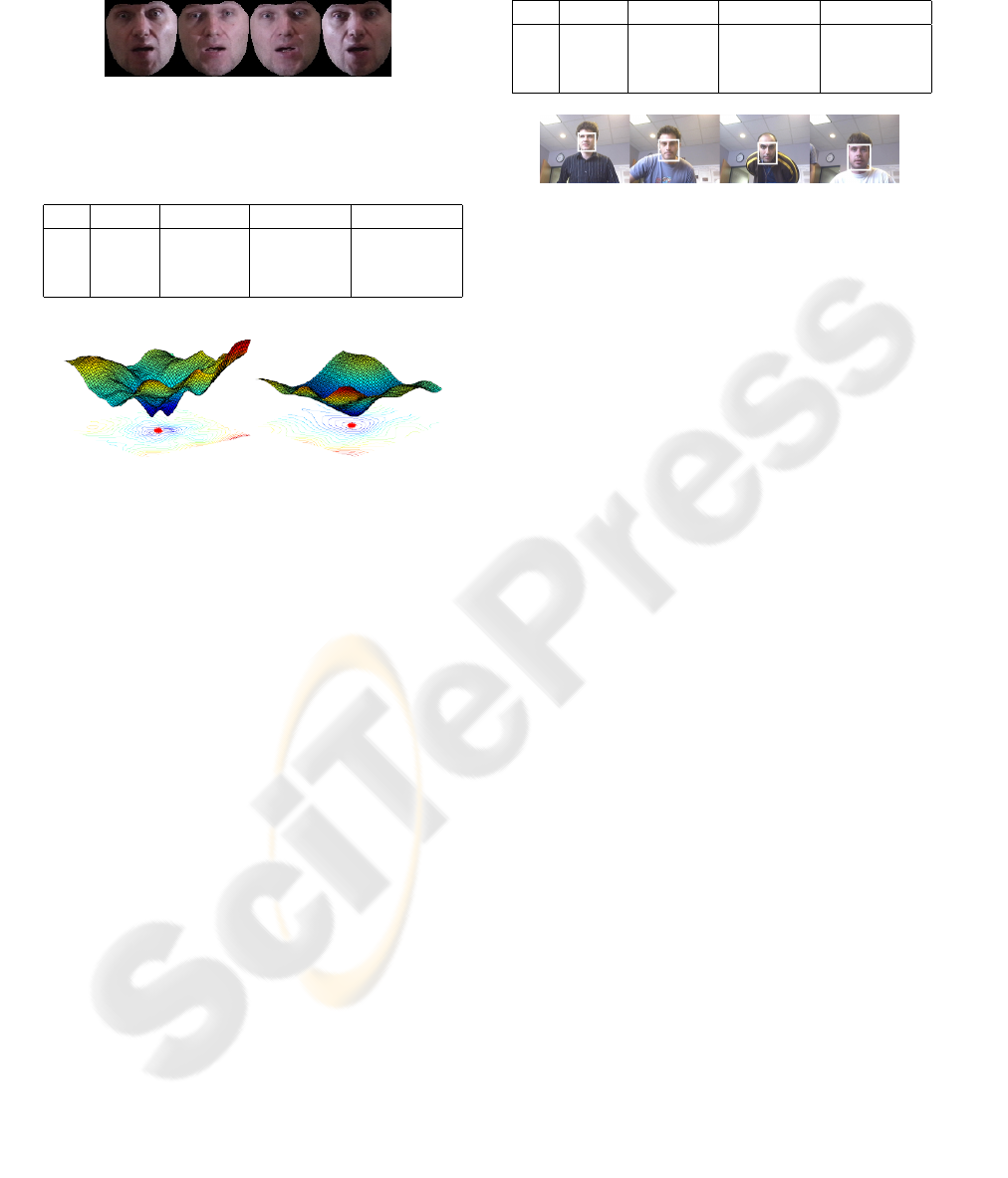
than graylevel or Gabor filters in terms of location and
density of local minima.
Figure 5: Changes in illumination on the PIE database.
Table 2: Experiments on illumination.(1),(2),(3) see table1.
gray FCA
λ=0
FCA
λ=0.5
Gabor(8,4)
(1) 41 74 73 62
(2) 14.59 26.37 26.04 19.68
(3) 3.28 1.4 1.41 1.92
Figure 6: Error surface for graylevel and FC A
λ=0
(11, 4).
The last experiment of this section explores FCA
performance on images taken in the lab. 10 images
have been collected in the lab (see Fig. 7) with an
inexpensive webcam, and roughly selecting the same
scale manually. Table 3 shows the detection results
of this experiment. As we can see FCA consistently
outperforms other representations that included Ga-
bor and graylevel in all metrics.
5 CONCLUSIONS AND FUTURE
WORK
In this paper, we have proposed FCA to build a multi-
band representation of the image to achieve more
robust fitting and detection with appearance mod-
els. FCA outperforms Gabor, oriented pair filters and
graylevel representations. Additionally, we have in-
troduced quantitative metrics for evaluating the error
surface. FCA has shown promising results, however
future work should consider the use of different con-
straints for the filters (e.g. vec(F)
T
1
f
x
×f
y
= 1). Also,
it will be worth to explore the use of some recent non-
linear filters.
Acknowledgements The work was partially sup-
ported by National Institute of Justice award 2005-IJ-
CX-K067 and NIMH grant. Thanks to Iain Matthews
and Simon Lucey for helpful discussions and com-
ments.
Table 3: Experiments on images taken in the lab.(1), (2), (3)
see table 1.
gray FCA
λ=0
FCA
λ=0.5
Gabor(8,4)
(1) 20 80 80 70
(2) 15.71 18.05 25.52 13.53
(3) 2 2 1.2 2.4
Figure 7: Some test images.
REFERENCES
Bischof, H., Wildenauer, H., and Leonardis, A. (2004). Il-
lumination insensitive recognition using eigenspaces.
Computer Vision and Image Understanding, 1(95):86
– 104.
Black, M. J. and Jepson, A. D. (1998). Eigentracking:
Robust matching and tracking of objects using view-
based representation. International Journal of Com-
puter Vision, 26(1):63–84.
Blanz, V. and Vetter, T. (1999). A morphable model for the
synthesis of 3d faces. In SIGGRAPH.
Cootes, T. and Taylor, C. (2001a). On representing edge
structure for model matching. In CVPR.
Cootes, T. F. and Taylor, C. J. (2001b). Statistical
models of appearance for computer vision. In
http://www.isbe.man.ac.uk/bim/refs.html.
de la Torre, F. and Black, M. J. (2003). Robust parame-
terized component analysis: theory and applications
to 2d facial appearance models. Computer Vision and
Image Understanding, 91:53 – 71.
de la Torre, F., Vitri
`
a, J., Radeva, P., and Melench
´
on, J.
(2000). Eigenfiltering for flexible eigentracking. In In-
ternational Conference on Pattern Recognition, pages
1118–1121.
Lewis, J. P. (1995). Fast normalized cross-correlation. In
Vision Interface.
Matthews, I. and Baker, S. (2004). Active appearance mod-
els revisited. International Journal of Computer Vi-
sion, 60(2):135–164.
Neti, C., Potamianos, G., Luettin, J., Matthews, I., Glotin,
H., Vergyri, D., Sison, J., Mashari, A., and Zhou,
J. (2000). Audio-visual speech recognition. Tech-
nical Report WS00AVSR, Johns Hopkins University,
CLSP.
Rao, R. and Ballard, D. (1995). An active vision architec-
ture based on iconic representations. Artificial Intelli-
gence, 12:441–444.
Sim, T., Baker, S., and Bsat, M. (2002). The cmu pose,
illumination, and expression (pie) database. In IEEE
Conference on Automatic Face and Gesture Recogni-
tion.
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
212
