
DETECTING AND CLASSIFYING FRONTAL, BACK AND PROFILE
VIEWS OF HUMANS
Narayanan Chatapuram Krishnan, Baoxin Li and Sethuraman Panchanathan
Center for Cognitive and Ubiquitous Computing, Arizona State University, Tempe, USA
Keywords:
Human Detection, graph cut, shape context, SVM.
Abstract:
Detecting and estimating the presence and pose of a person in an image is a challenging problem. Literature
has dealt with this as two separate problems. In this paper, we propose a system that introduces novel steps to
segment the foreground object from the back ground and classifies the pose of the detected human as frontal,
profile or back view. We use this as a front end to an intelligent environment we are developing to assist
individuals who are blind in office spaces. The traditional background subtraction often results in silhouettes
that are discontinuous, containing holes. We have incorporated the graph cut algorithm on top of background
subtraction result and have observed a significant improvement in the performance of segmentation yielding
continuous silhouettes without any holes. We then extract shape context features from the silhouette for
training a classifier to distinguish between profile and nonprofile(frontal or back) views. Our system has
shown promising results by achieving an accuracy of 87.5% for classifying profile and non profile views using
an SVM on the real data sets that we have collected for our experiments.
.
1 INTRODUCTION
Detecting the presence of a human and estimating
his/her pose in a video sequence is a challenging prob-
lem and has been an active area of research,witnessing
a surge of interest in the recent years with widening
spectrum of applications. Our motivation behind this
problem is designing a system that can detect the pres-
ence of a human and also estimate the pose, that can
be used as an assistive device for individuals who are
blind in their office spaces. We hope that such a sys-
tem would be useful in informing an individual who is
blind, if there are any people standing by the entrance
of their office space. The requirement of such a sys-
tem makes it different from other systems for surveil-
lance.Apart from being accurate in detecting a person
at the entrance, information about the pose of the per-
son(frontal,back or profile) is useful for the individual
who is blind to judge whether the person is waiting for
them to respond.
In our proposed system, background subtraction
is performed on the frames obained from a station-
ary video camera. On detection of significant change,
the system localizes the change and performs a robust
segmentation to obtain the silhouette of the region that
has changed. This silhouette is then used to determine
whether the moving object is a human and to estimate
pose of the person. We envision conveying this in-
formation to the individual who is blind, through an
audio device. It is difficult for individuals who are vi-
sually impaired to come to know if there are people
standing by their door side. We hope that such a sys-
tem will enhance the social interaction ability of the
individual by giving them cues about people who are
passing by and who are standing by their door.
We have divided this paper in the following man-
ner. Section 2 gives a summary of the related work on
human detection. The details about background sub-
traction and foreground segmentation are discussed in
section 3 and the classification step in section 4.
Section 5 presents the results obtained at the vari-
ous stages and analyses them. Conclusions and future
work are presented in sections 6.
137
Chatapuram Krishnan N., Li B. and Panchanathan S. (2007).
DETECTING AND CLASSIFYING FRONTAL, BACK AND PROFILE VIEWS OF HUMANS.
In Proceedings of the Second International Conference on Computer Vision Theory and Applications - IU/MTSV, pages 137-142
Copyright
c
SciTePress

2 RELATED WORK
Background subtraction techniques for human de-
tection rely on the static background information or
on the motion information, to first detect the regions
that have changed or moved. Beleznai etal (Beleznai
et al., 2004) perform a Mean shift clustering of the
subtracted image to identify regions of significant
change. The clustered regions are then checked for
the presence of humans by fitting a simple human
model in terms of three rectangles. Eng and etal (Eng
et al., 2004) propose a similar technique where the
local foregrond objects are detected using clustering,
and an elliptical model is used to represent the
humans. A Bayesian framework is then employed to
estimate the probability of the presence of a human
after fitting the ellipses to a foreground object region.
Elzein and etal (Elzein et al., 2003) propose a vision
based technique for detecting humans in videos. A
localized optic flow computation is performed to
compute the locations that have undergone significant
amount of motion. Haar wavelet features at different
scales are extracted from these localised regions, and
matched against that of templates using a linear clas-
sifier. Lee and etal (Lee et al., 2004) use differential
motion analysis to subtract the current input image
from a reference image and thus extract the contour
of the moving object. A curve evolution technique
is then performed to remove the redundant points
and noise on the contour. The curve thus extracted
is matched against existing templates by calculating
the Euclidean distance of the turn angles at the points
describing the curve.
Dalal and etal (Dalal. Navneet and Schmid, 2006)
propose a technique for detecting the humans based
on oriented histrograms of flow and appearance.
Optic flow is computed between successive frames
and the direction of flow is quantized. The histogram
constructed based on these directions of flow, coupled
with the histograms of oriented gradients are used to
train a linear SVM to detect the presence of humans.
Bertozzi and etal (Bertozzi et al., 2005) describe a
system for pedestrian detection using stereo infrared
images. Warm areas from the images are detected
and segmented. An edge detection operation is
performed on the resulting regions, followed by a
morphological expansion operation. Different head
models are then used to validate the presence of
humans in the resulting images. Researchers have
proposed similar algorithms (Zhou and Hoang, 2005;
Han and Bhanu, 2005) to detect humans using either
motion information or static background information.
But all of these algorithms, have stopped at detecting
whether the moving object is a human or not. We go
a step further and also provide information about the
high level pose of the person by indicating whether
it is a frontal, back or profile view of the person. As
mentioned before, estimating the pose of the person
will help an individual to decide if the person at the
door is waiting for them to respond or not.
We employ a background subtraction technique,
enhanced by graph cut algorithm to segment the fore-
ground regions. Silhouettes thus obtained are used
to extract features like shape context and fourier de-
scriptors. These are then used to train a classifier to
distinguish between the profile and non profile views.
Though many researchers use synthetically generated
human silhouettes for testing the pose estimation al-
gorithms, we have used real segmented silhouettes for
evaluating our pose estimation algorithm.
3 SEGMENTATION
This section deals with the 3 stage process of ex-
tracting the silhouette of the foreground objects.
A running average model is based on technique
proposed by Wren etal in (Wren et al., 1997)pic-
cardi:04, where the background is independently
modeled at each pixel location is used to model the
background. A Gaussian probability density function
(pdf) that fits the pixel’s last n values is computed.
A running average is computed to update the pdf.
Often, even with these models, the shadow regions
get misclassified as foreground. Assuming that the
illumination component of the pixel locations in the
shadow region undergo uniform change, we use the
derivatives at these locations to cancel out this unform
change. The derivatives of the pixel locations in the
shadow region for both the background model and
the current frame should be very similar. Thus the
difference in the derivatives can help in eliminating
to a certain extent the shadow regions.
Robust background subtraction can still result
in broken contours and blobs of the foreground
object. It is difficult to detect whether the foreground
object is a human using these blobs. Ideally we
would like to have a continuous contour that can
be further processed. To obtain this continuous
contour we have used the extended version of graph
cut algorithm (Boykov and Jolly, 2001) proposed
by Rother etal (Rother et al., 2004) for color image
segmentation. Though this approach guarantees an
optimal segmentation solution, given the constraints,
the drawback is that the seed or the trimap(the initial
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
138

foreground, background and unknown regions) has to
be manually initialized. We have improved upon this
framework by automatically constructing the trimap
from the background subtracted mask obtained in
the previous step. We explain briefly the graph cut
framework and refer the reader to (Boykov and Jolly,
2001; Rother et al., 2004) for the theoretical and
implementational details.
The trimap consists of three regions namely, back-
ground, foreground and unknown. Gaussian mix-
ture models (with K components) are computed for
the background and foreground pixel classes using
the minimum variance color quantization approach
proposed by Orchard and Boumann (Orchard and
Bouman, 1991). Each pixel in the foreground set
is assigned to the foreground GMM component that
has the highest likelihood of producing that color.
Similarly the background pixels are also assigned
to the most likely background gaussian component.
The Gaussian mixtures are then recomputed from the
newly created pixel sets. A graph is constructed as
described in (Boykov and Jolly, 2001). Every pixel
in the image is associated with a node in the graph
along with two other special nodes- the foreground
and the background node. These nodes are joined by
two types of links - N-links that connect every pixel
with its 8 neighbors and the T-links which connect ev-
ery pixel to the foreground node and the background
node. The N-link describes the penalty for placing
the segmentation boundary between neighboring pix-
els, which is set to be high in regions of low gradient
and low in regions of high gradient. The T-links de-
scribe the probability of each pixel belonging to the
foreground or to the background. The weight for the
N-link between pixel i and j is given by
W
n
(i, j) =
γ
dist(i, j)
e
−β
k
I
i
−I
j
k
2
. (1)
where I
i
is the color of pixel i and dist(i, j) is the
Euclidean distance between pixel locations i and j.
(Rother et al., 2004; Boykov and Jolly, 2001) suggest
setting γ = 50 and β as given in equation 2 .
β =
1
2
D
I
i
−I
j
2
E
(2)
The T-link weights are computed as described in table
1,where L(i) = 8γ+1 and W (i) is the log likelihood of
a pixel belonging to either background or foreground
given by
W (i) = −log
K
∑
k=1
π
k
1
√
detΣ
k
e
(
−
1
2
[I
i
−µ
k
]
T
Σ
−1
k
[I
i
−µ
k
]
)
(3)
Table 1: Weights for the T-Links.
Pixel Type Background Foreground
i ∈ foreground 0 L(i)
i ∈ background L(i) 0
i ∈ unkown W
f ore
(i) W
back
(i)
Thus once the weights for all the links are computed,
the problem reduces to finding the cut, that maximises
the flow from the foreground node to the background
node. This is performed by the fast mincut algorithm
implemented by (Boykov and Jolly, 2001).The final
result of the segmentation process is an optimal
solution to this minimizing energy problem.
One of the main disadvantages of this technique
as pointed out by Kumar etal (Kumar et al., 2005) is
that this framework does not have a mechanism to
segment out natural shapes. Keeping this in mind,
we have formulated a simple way of generating the
trimap from the background subtracted mask. We pre-
serve the shape of the segmented mask,the foreground
region of the trimap, as much as possible along with
making the holes within the mask and a thin boundary
around the mask as unknown regions of the trimap.
4 SHAPE CLASSIFICATION
Our objective behind using shape classification is
two fold - categorize the silhouette as a human
silhouette and to estimate whether it is the profile
non profile view of the person. As mentioned before
our objective is not to estimate the accurate pose of a
person, as dealt by others. We have used the shape
context feature proposed initially by Belongie and
etal (Belongie et al., 2002) for shape classification
and later modified by Agarwal and Triggs (Agarwal
and Triggs, 2004) for pose estimation. The silhouette
is first processed to select n contour points at equally
spaced intervals. The shape context at a point de-
scribes the spatial locations of the other n−1 sampled
points with respect to the point under consideration
in a histogram. The shape is encoded as a distribution
in the 60-D shape context space(12 angular bins and
5 radial bins). Belongie and etal (Belongie et al.,
2002) match the shape context vectors extracted
from two silhouettes, using a bipartite weighted
graph matching algorithm, while Agarwal and Triggs
(Agarwal and Triggs, 2004) compute another layer
of histogram before applying the relevance vector
regression for pose estimation. We have taken the
step of generating a second layer of histograms.The
distribution of all the points on a silhouette is reduced
DETECTING AND CLASSIFYING FRONTAL, BACK AND PROFILE VIEWS OF HUMANS
139
to 100-D histograms by vector-quantizing the shape
context space. The 100 center codebook is learnt us-
ing a K-means clustering algorithm over all the 60-D
shape context vectors in the training set. The 100-D
final histogram is then constructed by allowing every
shape context vector of a silhouette to vote softly
using gaussian weights into the bins corresponding
to the top 5 nearest centers to them and subsequently
accumulating it over all the points in a silhouette.
Instead of using relevance vector regression as in
(Agarwal and Triggs, 2006) or having exemplars to
denote the different shapes (Poppe and Poel, 2006),
we experimented with training a support vector
machine (SVM), for distinguishing between different
views of a person. The SVM was trained with the
100-D histograms extracted out of the silhouettes
from the training set. It is intutive that the silhouette
of the frontal and the back view of a person are very
similar. Thus trying to distinguish between these
two views using silhouettes may be a futile effort.
However, the silhouettes of the profile view are
significantly different from the frontal or back. Thus
at this step, we have tried to differentiate between the
profile view from the non-profle view. The training
set consists of the feature vector extracted from the
frontal as well back views in one class and that of
the profile view in another class. In the next step as
described in the following subsection, we classify
the non-profile view as frontal or back based on the
image data.
Frontal Vs Back View distinction: As it is difficult
to differentiate between the frontal and back view of
a person using the silhouette information, we revert
to the color information present in the image. We
have used a skin color detection algorithm, to com-
pute the number of pixels in the upper region of the
silhouette, corresponding to the head region, having
the skin color. If this number is greater than a thresh-
old, we classify the view as frontal else we label it as
back.
5 RESULTS AND DISCUSSION
Though there are existing synthetically generated
clean human silhouette databases (Agarwal and
Triggs, 2004),it is important to work with real data to
understand the problems and limitations, encountered
when a vision based system is deployed in a real
environment. We captured people entering, exiting
and passing by a cubicle in our lab using a sony
handycam. 10 second videos with a frame rate of
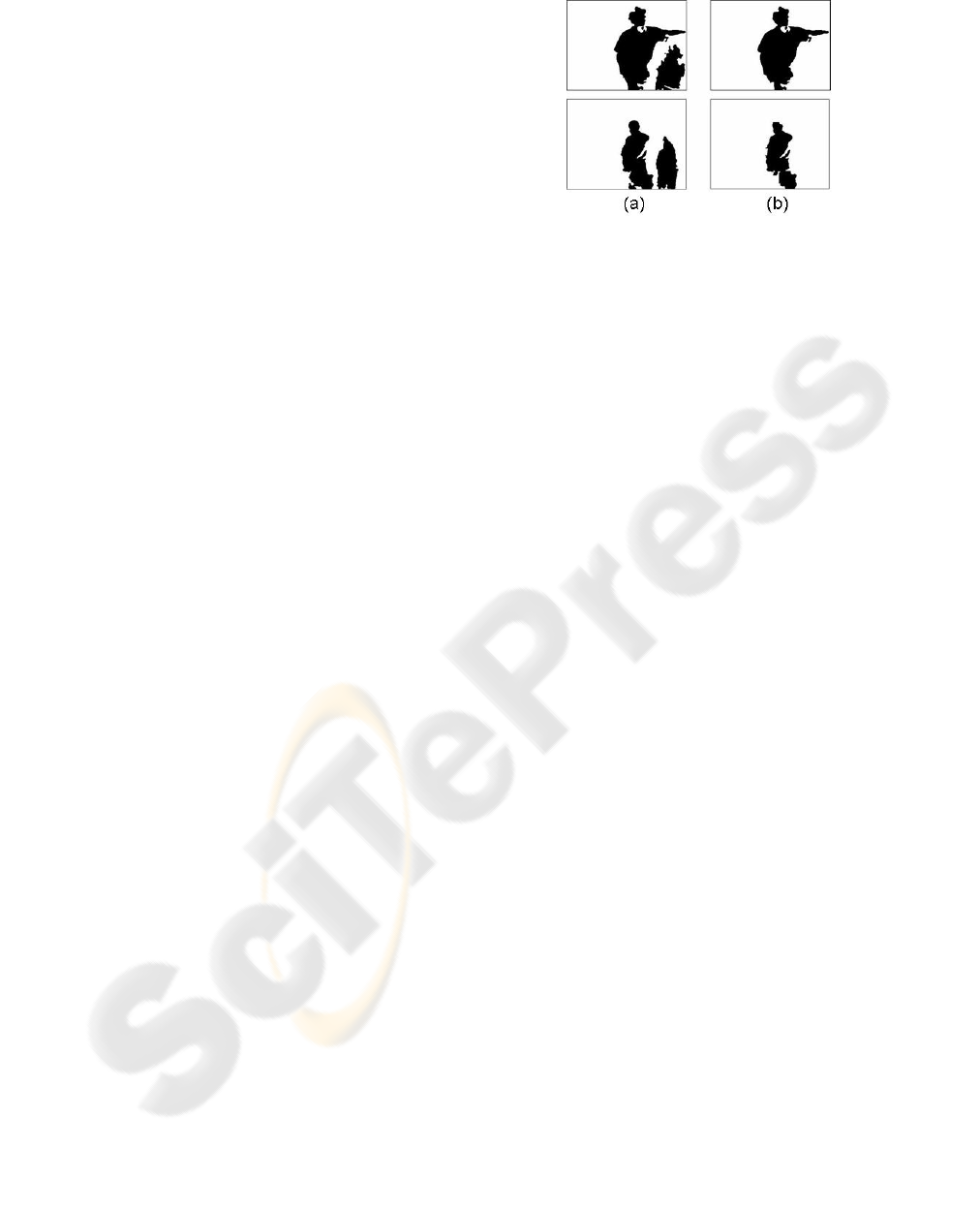
Figure 1: The results of the shadow removal step.
30 seconds of 15 individuals under varying lighting
conditions were captured. Individual frames from the
video sequence were then extracted and manually
labeled as either belonging to frontal, back or the
profile view of the person. A total of 604 frontal, 297
back and 277 profile view images, on an average of
40 frontal, 20 back and 20 profile views per person
were thus collected and labelled. The first row of
Figure 5 shows some of the sample frames.
Figure 5 presents the results obtained after the
shadow removal step. Column (a) contains the
images obtained after background subtraction and
column (b) is the result obtained after combining
(a) with the difference of the response to the LoG
operator. Some regions, in the image in the second
row that belonged to the foreground object also got
erased after the shadow removal step. However,
the graph cut algorithm in the next step, rectifies
the segmentation by including these regions in the
foreground object as shown in the image in the last
row of column (e) in figure 5. This is possible
because, regions around foreground silhouette in
the image shown in 5(b) are considered as unkown
regions when constructing the trimap for the graph
cut algorithm.
Figure 5 illustrates the process of segmentation.
Each column contains the results obtained at the
different steps in the segmentation process of the
image shown in the first row of the column. One
important observation about the final segmentation
result(last row in figure 5), is that the end results
have no holes, and the silhouette is continuous, when
compared with the back ground subtracted image
shown in the second row. The third row depicts the
trimap that is created out of the image in the second
row. As it can be seen, the overall shape of the
silhouette is more or less preserved in the trimap. It
is evident from the results that adding the graph cut
step indeed improves the segmentation result, thereby
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
140

Table 2: Comparison of accuracies for different values of
the parameters - number of code vectors and number of
sample points.
Number of Code Vectors
50 100 150
Number of
Sample
Points
50 86.64% 85.45% 86.11%
100 86.54% 87.5% 86.93%
150 86.25% 87.5% 87.14%
Table 3: Comparison of the performance of Shape context
and Fourier descriptors as features for classifying the sil-
houette as profile or non profile.
Feature Vector Linear SVM Gaussian SVM
Shape Context 87.5% 83.1%
Fourier Descriptors 76.53% 73.6%
improving the classification accuracy.
After the silhouettes are computed as shown in the
last row of figure 5, shape features are extracted from
it. We have experimented with two features described
in the literature - Shape Context and Fourier Descrip-
tors. The shape context features were implemented
by considering 100 equally spaced points on the sil-
houette boundary. The larger the number of sampled
points, the more accurate is the silhouette description.
However, the noise in the contour as a result of seg-
mentation process also gets encoded. Similarly, the
lesser the number of sample points, lesser is the ac-
curacy of the encoded silhouette. We experimented
with 50, 100 and 150 sample points for describing
the silhouettes. The classification accuracies obtained
are shown in table 2. As mentioned before a sec-
ond layer of histogram is computed to further quan-
tize the shape context vector. The auhtors (Agarwal
and Triggs, 2004) cluster the training shape context
vectors in to 100 code vectors. We experimented with
different number of code vectors. In both the cases it
can be noted that there is no significant change in the
performance.
Translational, rotational and scale invariant
fourier descriptors were computed as mentioned by
(Poppe and Poel, 2006). However instead of using
exemplars to compare the test silhouette, we trained
an SVM classifier. The best performance with fourier
descriptors for classifying the silhouettes as profile
or non-profile view was around 76.53%, while an
accuracy of 87.5% was achieved using shape context
features. We have used the leave one out strategy,
where for every fold, images from one video was
considered as the test sequence and the remaining
were the training sequence. This clearly shows the
superiority of shape context features over fourier
descriptors in the current context. There was no
significant change in the performance of the features
when a gaussian SVM was used instead of a linear
classifier. These results are summarized in table 3.
We used the standard skin tone detection approach
to distinguish between the frontal and the back views.
Depending on the size of the silhouette, regions from
the top part of the silhouette were extracted for de-
tecting the presence of skin tone. A threshold was
determined for classification. We were able to get an
accuracy of 71%. One of the reasons for getting a low
accuracy was that, regions other than the head region
also got included while computing the percentage of
skin color. We are working on techniques that would
consider only the elliptical head region to determine
the percentage of skin color.
6 CONCLUSION
We have proposed a system for detecting the pres-
ence of a human in an indoor environment and clas-
sifing the pose at a high level as frontal, back or pro-
file view. We have improved on the traditional back-
ground subtraction method, by adding a step that per-
forms graph cut. The results obtained after this step
show significant improvement over the background
subtracted images. The silhouette thus extracted was
used for classiyfing the profile and non profile views
of the human. We experimented with two features
for this purpose - shape context and fourier descrip-
tors. We observed that shape context features perform
significantly better(with an accuracy of 87.5%) than
the fourier descriptors(with an accuracy of 76.53%)
in classifying a silhouette as profile or non profile.
We further have used the percentage of skin color to
classify the non profile view as either frontal or back,
achieving around 71% accuracy. We intend to use this
as a front end to an intelligent environment we are
developing to assist individuals who are visually im-
paired in their office spaces.
DETECTING AND CLASSIFYING FRONTAL, BACK AND PROFILE VIEWS OF HUMANS
141

