
3D HUMAN TRACKING WITH GAUSSIAN PROCESS
ANNEALED PARTICLE FILTER
Leonid Raskin, Ehud Rivlin and Michael Rudzsky
Computer Science Department,Technion Israel Institute of Technology, Technion City, Haifa, Israel
Keywords: Tracking, Annealed particle filter, Gaussian fields, Latent space.
Abstract: We present an approach for tracking human body parts with prelearned motion models in 3D using multiple
cameras. We use an annealed particle filter to track the body parts and a Gaussian Process Dynamical
Model in order to reduce the dimensionality of the problem, increase the tracker's stability and learn the
motion models. We also present an improvement for the weighting function that helps to its use in occluded
scenes. We compare our results to the results achieved by a regular annealed particle filter based tracker and
show that our algorithm can track well even for low frame rate sequences.
1 INTRODUCTION
This paper presents an approach to 3D people
tracking that enables reduction in the complexity of
this model. We propose a novel algorithm, Gaussian
Process Annealed Particle Filter (GPAPF). In this
algorithm we use nonlinear dimensionality reduction
with the help a Gaussian Process Dynamical Model
(GPDM), (Lawrence (2004), Wang et al. (2005)),
and an annealed particle filter proposed by
Deutscher and Reid (2004). The annealed particle
filter has good performance when working on videos
which were shot with a high frame rate (60 fps, as
reported by Balan et al. (2005)), but performance
drops when the frame rate is lower (30fps). We
show that our approach provides good results even
for the low frame rate (30fps). An additional
advantage of our tracking algorithm is the capability
to recover after temporal loss of the target.
2 RELATED WORKS
One of the common approaches for tracking is using
a Particle Filtering. Particle Filtering uses multiple
predictions, obtained by drawing samples of the
pose and location prior and then propagating them
using the dynamic model, which are refined by
comparing them with the local image data (the
likelihood) (see, for example Isard (1998) or Bregler
et al. (1998)). The prior is typically quite diffused
(because motion can be fast) but the likelihood
function may be very peaky, containing multiple
local maxima which are hard to account for in detail.
For example, if an arm swings past an “arm-like”
pole, the correct local maximum must be found to
prevent the track from drifting (Sidenbladh (2000)).
Annealed particle filter (Deutscher and Reid (2004))
or local searches are ways to attack this difficulty.
There exist several possible strategies for
reducing the dimensionality of the configuration
space. Firstly it is possible to restrict the range of
movement of the subject. This approach has been
pursued by Rohr et al. (1997). The assumption is
that the subject is performing a specific action.
Agarwal et al. (2004) assume a constant angle of
view of the subject. Because of the restricting
assumptions the resulting trackers are not capable of
tracking general human poses.
Another way to cope with high-dimensional data
is to learn low-dimensional latent variable models.
Urtasun et al. (2006) uses a form of probabilistic
dimensionality reduction by Gaussian Process
Dynamical Model (GPDM) (Lawrence (2004), and
Wang et al. (2005)) formulate the tracking as a
nonlinear least-squares optimization problem.
Our approach is similar in spirit to the one
proposed by Urtasun et al. (2006), but we perform a
two stage process. The first stage is annealed particle
filtering in a latent space of low dimension. The
particles obtained after this step are transformed into
the data space by GPDM mapping. The second stage
is annealed particle filtering with these particles in
the data space.
459
Raskin L., Rivlin E. and Rudzsky M. (2007).
3D HUMAN TRACKING WITH GAUSSIAN PROCESS ANNEALED PARTICLE FILTER.
In Proceedings of the Second International Conference on Computer Vision Theory and Applications - IU/MTSV, pages 459-465
Copyright
c
SciTePress

The article is organized as follows. In Section 3
and Section 4 we give short descriptions of particle
filtering and Gaussian fields. In Section 5, we
describe our algorithm. Section 6 contains our
results. The conclusions are in Section 7.
3 FILTERING
The particle filter algorithm was developed for
tracking objects, using the Bayesian inference
framework. Let us denote
n
x as a hidden state
vector and
n
y as a measurement in time n . The
algorithm builds an approximation of maximum a
posterior estimate of the filtering distribution:
()
n1:n
px|y where
()
1:n 1 n
y y ,...,y
is the
history of the observation. This distribution is
represented by a set of pairs
() ()
{
}
p
N
ii
nn
i=1
x,π
,
where
() ()
(
)
ii
nnn
π py|x∝
. The main problem is that
the distribution
()
nn
py|x may be very picky.
Often a weighting function
()
n
wy,x
can be
constructed in a way that it provides a good
approximation of
()
nn
py|x
, and is also easy to
calculate. The main idea in the annealed particle
filter is to use a set of weighting functions instead of
using a single one. A series of
()
{
}
M
nn
n=0
wy,x is
used, where
()
n+1 n
wy,x represents a smoothed
version of
()
nn
wy,x
. The usual method to
achieve this is by using
()()
n
β
nn 0n
wy,x=wy,x
,
where
()
0n
wy,x is equal to the original weighting
function and
0M
1=β >...>β
. Therefore, each
iteration of the annealed particle filter algorithm
consists of
M steps, in each of these the appropriate
weighting function is used and a set of pairs is
constructed
() ()
{
}
p
N
ii
n,m n,m
i=1
x,π . For details see
Deutscher et al. (2004) and Raskin et. al (2007).
4 GAUSSIAN FIELDS
The Gaussian Process Dynamical Model (GPDM)
represents a mapping from the latent space to the
data:
(
)
y=f x , where
d
∈
x \ denotes a vector in
a d-dimensional latent space and
D
∈y \ is a vector
that represents the corresponding data in a D-
dimensional space. Gaussian processes stem from
Bayesian formulation, in which the GPDM is
obtained by marginalizing out the parameters and
optimizing the latent coordinates x of the trained
data
y . The model that is used to derive the GPDM
is a mapping with first-order Markov Dynamics:
()
()
x= aφ x+n
tx,t
ii t-1
i
y= bψ x+n
ty,t
jj t
j
∑
∑
(1)
where
x,t
n and
y,t
n are zero-mean Gaussian noise
processes,
[
]
12
A= a ,a ,... and
[
]
12
B= b ,b ,... are
weights and
i
φ and
j
ψ are basis functions.
For the Bayesian perspective
A and B should
be marginalized out through model average with an
isotropic Gaussian prior on
B
in closed form to
yield:
()
()
()
()
N
W
-1 2 T
1
pY|X,β =exp-trKYWY
y
2
D
ND
2π K
y
(2)
where
Y is a matrix of training vectors, X contains
corresponding latent vectors and
y
K is the kernel
matrix:
(
)
δ
x,x
2
β
ij
2
K=β exp(- x -x )+
y1 ij
2 β
i,j
3
(3)
W is a scaling diagonal matrix. It is used to account
for the different variances in different data elements.
The hyper parameter
1
β represents the scale of the
output function,
2
β represents the inverse of the
RBF's and
-1
3
β represents the variance of
y,t
n
.
For the dynamic mapping of the latent
coordinates
X
the joint probability density over the
latent coordinate system and the dynamics weights
A are formed with an isotropic Gaussian prior over
the
A , it can be shown (see Wang et al. (2005)) that
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
460

()
(
)
()
()
()
()
px
1
-1 T
1
pX|α =exp-trKXX
x out out
2
d
N-1 d
2π K
x
(4)
where
[
]
2
,...,
T
out N
X
xx= ,
x
K is a kernel
constructed from
[
]
T
1N-1
x ,...,x
and
1
x has an
isotropic Gaussian prior. GPDM uses a
"linear+RBF" kernel with parameter
i
α :
(
)
δ
2
x,x
α
ij
T
2
K=α exp(- x -x )+α xx+
12ij
xij
2 α
i,j
4
(5)
Following Wang et al. (2005)
(
)
(
)
(
)
(
)
(
)
pX,α,β|Y p Y|X,β pX|α p α p β∝
(6)
The latent positions and hyper parameters are found
by maximizing this distribution or minimizing the
negative log posterior:
(
)
()
d1
-1 T
Λ=lnK+trKXX +lnα
x X out out i
22
i
D1
-1 2 T
-Nln W + ln K + tr K YW X + lnβ
yY j
22
j
∑
∑
(7)
5 GPAPF FILTERING
5.1 The Model
In our work we use a model similar to the one
proposed by Deutscher et al (2004) with some
differences in the annealed schedule and weighting
function. The body model is defined by a pair
{
}
M= L,Γ , where L are the limbs lengths and
Γ are the angles between limbs and the global
location of the body in 3D. The limbs parameters are
constant, and represent the actual size of the tracked
person. The angles represent the body pose and,
therefore, are dynamic. The state is a vector of
dimensionality 29: 3 DoF for the global 3D location,
3 DoF for the global rotation, 4 DoF for each leg, 4
DoF for the torso, 4 DoF for each arm and 3 DoF for
the head. The whole tracking process estimates the
angles in such a way that the resulting body pose
will match the actual pose. This is done by
minimizing the weighting function which is
explained next.
5.2 The Weighting Function
In order to evaluate how well the body pose matches
the actual pose using the particle filter tracker we
have to define a weighting function
()
w,Z
Γ
,
where
Γ
is the model's configuration (i.e. angles)
and
Z stands for visual content (the captured
images). Our function is based on a function
suggested by Deutscher et al (2004) with some
changes made to it. We have experimented with 3
different features: edges, silhouette and foreground
histogram. The first feature is the edges. As
Deutscher proposes this feature is the most
important one, and provides a good outline for
visible parts, such as arms and legs. The other
important property of this feature is that it is
invariant to the colour and lighting condition. The
edges maps, in which each pixel is assigned a value
dependent on its proximity to an edge, are calculated
for each image plane. Each part is projected on the
image plane and samples of the
e
N hypothesized
edge are drawn. A squared probability function is
calculated for these samples:
()
()
()
e
ecv
N
N
cv
2
e
e
11
Ρ ,Z = 1-p ,Z
NN
ji
i=1
j=1
∑
ΓΓ
∑
(8)
where
cv
N is a number of camera views,
i
Z is
the
i -th image . The
(
)
e
ji
p,ZΓ
are the edge maps.
However, the problem that occurs using this feature
is that the occluded body parts will produce no
edges. Even the visible parts, such as the arms, may
not produce the edges, because of the colour
similarity between the part and the body. This will
cause
(
)
e
ji
p,ZΓ to be close to zero and thus will
increase the weighting function. Therefore, a good
pose which may match the visual context may
results in a high value of weighting function and
may be omitted. In order to overcome this problem
we calculate a weight for each image plane. For each
sample point on the edge we estimate the probability
of the point being covered by another body part. Let
i
N be the number of hypothesized edges that are
drawn for the part
i . The total number of drawn
sample points can be calculated using
bp
N
ei
i=1
N= N
∑
.
The weight of the part for the
j -th image plane can
be calculated as following:
(
)
(
)
N
N
N
cv
i
i
fg fg
w(,Z)=p,Z/ p,Z
ij
ij ij
kk
k=1 j=1
k=1
∑∑
ΓΓ Γ
∑
(9)
3D HUMAN TRACKING WITH GAUSSIAN PROCESS ANNEALED PARTICLE FILTER
461

where
i
Γ is the model configuration for part i ,
j
Z
is the j-th image plane and
()
fg
kij
p,ZΓ is the
probability that the
k -th sample is covered by
another body part. The weighting function therefore
has the following form:
(
)
()
()
(
)
ecv
N
2
i
e
Ρ ,Z = 1-p ,Z
bp cv k bp cv
k=1
N
N
bp
cv
e
11
Ρ ,Z = w( ,Z )Ρ ,Z
NN
ji ji
i=1
j=1
⎛⎞
∑
ΓΓ
⎜⎟
⎝⎠
∑
ΓΓΓ
∑
(10)
The second feature is the silhouette obtained by
subtracting the background from the image. The
foreground pixel map is calculated for each image
plane with background pixels set to 0 and
foreground set to 1 and SSD is computed:
()
()
e
N
N
2
cv
fg
fg
11
Ρ ,Z = 1-p ,Z
NN
i
j
i=1
j=1
⎛⎞
∑
ΓΓ
∑
⎜⎟
⎝⎠
ecv
(11)
where
b
p
N is the number of different body parts in
the model,
()
fg
ji
p,ZΓ is the value is the foreground
pixel map values at the sample points. The third
feature is the foreground histogram. The reference
histogram is calculated for each body part. It can be
a grey level histogram or three separated histograms
for colour images. Then, on each frame a normalized
histogram is calculated for a hypothesized body part
location and is compared to the referenced one and
the Bhattacharya distance is computed:
(
)
(
)
()
(
)
hyp
ref
P,Z=p ,Zp ,Z
k
b
p cv k bp cv bp cv
k
N
N
bp
cv
bins
h
Ρ ,Z = 1- P ,Z
kbpcv
i=1
j=1 k=1
⎛⎞
ΓΓΓ
⎜⎟
⎝⎠
⎛⎞
∑
ΓΓ
⎜⎟
∑∑
⎜⎟
⎝⎠
(12)
where
()
orig
ji
p,ZΓ is the value of bin
j
in the
reference histogram, and the
()
hyp
ji
p,ZΓ
is the value
of the same bin on the current frame using the
hypothesized body part location. The main drawback
of that feature is that it is sensitive to changes in the
light condition and the texture of the tracked object.
Therefore, the reference histogram has to be
updated, using the weighted average from the recent
history.
In order to calculate the weighting function the
features are combined together using the following
formula:
efg h
w( ,Z)=exp(-(Ρ (,Z)+Ρ (,Z)+Ρ ( ,Z)))ΓΓΓΓ
(13)
As was stated above, the purpose of the tracker is to
minimize the weighting function.
5.3 GPAPF Learning
The drawback in the particle filter tracker is that a
high dimensionality of the state space causes an
exponential increase in the number of particles that
are needed to be generated in order to preserve the
same density of particles. In our case, the dimension
of the data is 29. In their work Balan et al. (2005)
show that the annealed particle filter can track body
parts with ~125 particles using 60 fps video input.
However, using a significantly lower frame rate (15
fps) causes the tracker to produce bad results and
eventually to lose the target.
The other problem is that once a target is lost (i.e.
the body pose was wrongly estimated, which can
happen for the fast and not smooth movements) it
becomes highly unlikely that the next pose will be
estimated correctly in the following frames. In order
to reduce the dimension of the space we have used
Gaussian Process Annealed Particle Filter (GPAPF).
We use a set of poses in order to create a latent
space with a low dimensionality. The poses are
taken from different sequences, such as walking,
running, punching and kicking. We divide our state
into two independent parts. The first part contains
the global 3D body rotation and translation, which is
independent of the actual pose. The second part
contains only information regarding the pose (26
DoF). We use GPDM to reduce the dimensionality
of the second part. This way we construct a latent
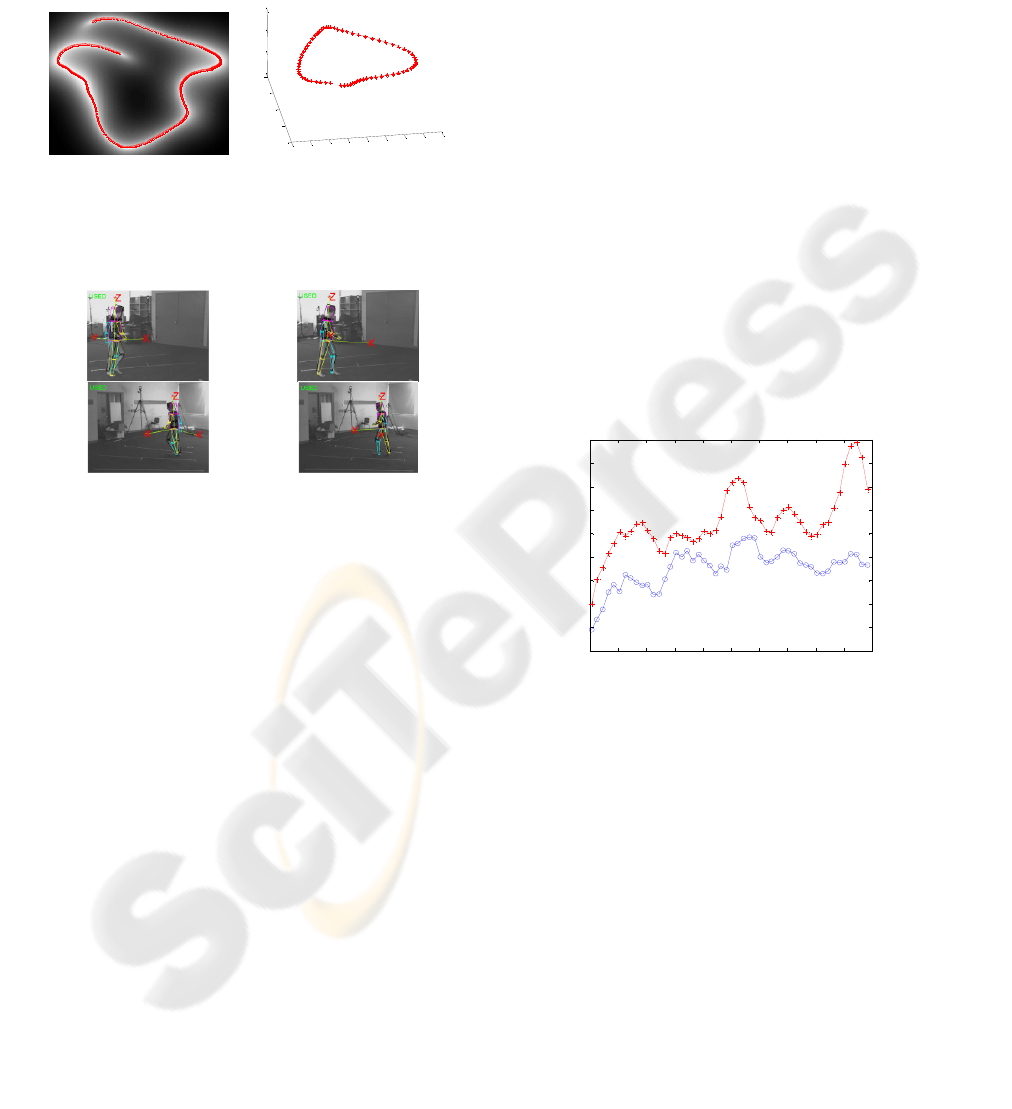
space (Fig. 1). This space has a significantly lower
dimensionality (for example 2 or 3 DoF). Unlike
Urtasun et al. (2006), whose latent state variables
include translation and rotation information, our
latent space includes solely pose information and is
therefore rotation and translation invariant. The
particles are drawn in the latent space. In order to
calculate the weighting function we transform the
data from the latent space to the data space and then
calculate the weighting function as explained above.
However, the latent space is not capable of
producing all the poses; therefore we apply an
additional iteration of the annealed tracker only for
the data space in order to make fine adjustments.
This final iteration is performed using a low
covariance matrix, which is nearly invariant for all
frames rates.
The main difficulty in this approach is that the latent
space is not uniformly distributed. Therefore we are
using a dynamic model, as proposed by Wang et al.
(2005), in order to achieve smoothed transitions
between sequential poses in the latent space.
However, as it is shown in Fig. 1, there are still
some irregularities and discontinuities. Moreover,
while in a regular space the change in the angles is
independent on the actual angle value, in a latent
space this is not the case. Each pose has a certain
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
462
probability to occur and thus the probability to be
drawn as a hypothesis should be dependent on it. For
each particle we can calculate an estimate of the
variance that can be used for generation the new
ones. In the left part of Fig. 1 the lighter pixels
represent lower variance.
-
2
-
1
0
1
2
-2
-1
0
1
-2
-1
0
1
2
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-4
-2
0
2
Figure 1: The latent space that is learned from different
poses during the walking sequence. Left: the 2D space.
Right: the 3D space. On the left image: the brighter pixels
correspond to more precise mapping.
Frame 137 Frame 141
Figure 2: Losing and finding the tracked target despite the
mis-tracking on the previous frame. Top: camera 1,
Bottom: camera 4.
Another advantage of this method is that the tracker
is capable of recovering after several frames, from
poor estimations. The reason for this is that particles
generated in the latent space are representing valid
poses more authentically. Furthermore because of its
low dimensionality the latent space can be covered
with a relatively small number of particles.
Therefore, most of possible poses will be tested with
emphasis on the pose that is close to the one that was
retrieved in the previous frame. So if the pose was
estimated correctly the tracker will be able to choose
the most suitable one from the tested poses.
However, if the pose on the previous frame was
miscalculated the tracker will still consider the poses
that are quite different. As these poses are expected
to get higher value of the weighting function the
next layers of the annealed will generate many
particles using these different poses. In this way the
pose is likely to be estimated correctly, despite the
mis-tracking on the previous frame (see Fig. 2).
An additional advantage of our approach is that the
generated poses are, in most cases, natural. Poses
generated by the Condensation algorithm or by
annealed particle filtering, where the large variance
in the data space, cause a generation of unnatural
poses. The poses that are produced by the latent
space that correspond to points with low variance
are usually natural and therefore the effective
number of the particles is higher, which enables
more accurate tracking. The drawback of this
approach is that it requires more calculation than the
regular annealed particle filter. The additional
calculations are the result of transformation from the
latent space into the data space.
6 RESULTS
We have tested out algorithm on the sequences
provided by L.Sigal, which are available at his site:
http://www.cs.brown.edu/~ls/Software/index.html.
The sequences contain different activities, such as
walking, boxing etc. which were captured by 7
cameras, however we have used only 4 inputs in our
evaluation. The sequences were captured using the
MoCap system, that provides the correct 3D
locations of the body parts for evaluation of the
results and comparison to other tracking algorithms.
0 20 40 60 80 100 120 140 160 180 200
20
30
40
50
60
70
80
90
100
110
Frame number
Predict ion error
Figure 3: The errors of the annealed tracker (red crosses)
and GPAPF tracker (blue circles) for a walking sequence
captured at 30 fps.
The first sequence that we have used was a walk
on a circle. The video was captured at frame rate 120
fps. We have tested the annealed particle filter based
body tracker, implemented by A. Balan (Balan et al.
(2005) ) , and compared the results with the ones
produced by the GPAPF tracker (see Fig. 3 and 4).
The error was calculated, based on comparison of
the tracker's output and the result of the MoCap
system. In Fig. 3 we can see the error graphs,
produced by GPAPF tracker (blue circles) and by
the annealed particle filter (red crosses) for the
walking sequence taken at 30 fps. As can be seen,
the GPAPF tracker produces more accurate
estimation of the body location. Same results were
achieved for 15 fps. In Fig. 4 one can see the actual
3D HUMAN TRACKING WITH GAUSSIAN PROCESS ANNEALED PARTICLE FILTER
463


Ramanan, D., and Forsyth, D. A., 2003 Automatic
Annotation of Everyday Movements. Neural Info.
Proc. Systems (NIPS), Vancouver, Canada.
Sigal, L., Bhatia, S., Roth, S., Black M. and Isard, M.
2004 Tracking loose-limbed people. In CVPR, vol. 1,
pp. 421–428.
Sidenbladh, H., Black, M. and Fleet, D. 2000 Stochastic
tracking of 3d human figures using 2d image motion.
In Proc. ECCV.
Song, Y., Feng, X. and Perona P. 2000. Towards
detection of human motion. In Proc. CVPR, pp 810–
17.
Urtasun, R., Fleet, D. .J., Hertzmann, and A., Fua, P. 2005
Priors for people tracking from small training sets. In
Proc. ICCV, Beijing v1, pp. 403-410.
Urtasun, R., Fleet, D. J., and Fua, P. 2006. 3D People
Tracking with Gaussian Process Dynamical Models.
.In Proc. CVPR'06 , v.1, pp. 238-245.
Wang, J.,Fleet, D. J., and Hetzmann, A. 2005.
Gaussian process dynamical models.In Proc.NIPS.
Vancouver, Canada: pp. 1441-1448.
Raskin, L. Rivlin, E., and Rudzsky M. 2007. 3D Human
Tracking with Gaussian Process Annealed Particle
Filter. Technical.Report. CS-2007-01
3D HUMAN TRACKING WITH GAUSSIAN PROCESS ANNEALED PARTICLE FILTER
465
