
BIASED MANIFOLD EMBEDDING FOR PERSON-INDEPENDENT
HEAD POSE ESTIMATION
Vineeth Nallure Balasubramanian and Sethuraman Panchanathan
Center for Cognitive Ubiquitous Computing (CUbiC), School of Computing and Informatics
Arizona State University, Tempe, AZ 85281, USA
Keywords:
Manifold learning, Non-linear dimensionality reduction, Face modeling and analysis, Head pose estimation,
Regression analysis.
Abstract:
Head pose estimation is an integral component of face recognition systems and human computer interfaces.
To determine the head pose, face images with varying pose angles can be considered to lie on a smooth
low-dimensional manifold in high-dimensional feature space. In this paper, we propose a novel supervised
approach to manifold-based non-linear dimensionality reduction for head pose estimation. The Biased Man-
ifold Embedding method is pivoted on the ideology of using the pose angle information of the face images
to compute a biased geodesic distance matrix, before determining the low-dimensional embedding. A Gener-
alized Regression Neural Network (GRNN) is used to learn the non-linear mapping, and linear multi-variate
regression is finally applied on the low-dimensional space to obtain the pose angle. We tested this approach
on face images of 24 individuals with pose angles varying from -90
◦
to +90
◦
with a granularity of 2
◦
. The re-
sults showed significant reduction in the error of pose angle estimation, and robustness to variations in feature
spaces, dimensionality of embedding and other parameters.
1 INTRODUCTION
As human-centered computing applications grow
each day, human face analysis has grown in its impor-
tance as a problem studied by several research com-
munities. The estimation of head pose angle from
face images is a significant sub-problem in this re-
spect in several applications like 3D face modeling,
gaze direction detection, driver monitoring safety sys-
tems, etc. Further, realistic solutions to the problem
of face recognition have to be able to handle signifi-
cant head pose variations, thereby leading to the gain
in importance of the automatic estimation of the ori-
entation of the head relative to the camera-centered
co-ordinate system. While coarse head pose estima-
tion has been successful to a large extent (Brown and
Tian, 2002), accurate person-independent pose esti-
mation, which is very crucial for applications like 3D
face modeling, is still in the works.
Current literature (Fu and Huang, 2006)
(Raytchev et al., 2004) (Wenzel and Schiffmann,
2005) separates the existing methods for head pose
estimation into distinct categories:
• Shape-based geometric analysis, where head pose
is discerned from geometric information like the
configuration of facial landmarks.
• Model-based methods, where non-linear paramet-
ric models are derived before using a classifier
like a neural network (Eg. Active Appearance
Models (AAMs)).
• Appearance-based methods, where the pose esti-
mation problem is viewed as a pattern classifica-
tion problem on image feature spaces.
• Template matching approaches, which are largely
based on nearest neighbor classification against
texture templates/signatures.
• Dimensionality reduction based approaches,
where linear/non-linear embedding of the face
images is used for pose estimation.
To overcome data redundancy and obtain compact
representations of face images, earlier work (Chen
et al., 2003) (Raytchev et al., 2004) (Fu and Huang,
76
Nallure Balasubramanian V. and Panchanathan S. (2007).
BIASED MANIFOLD EMBEDDING FOR PERSON-INDEPENDENT HEAD POSE ESTIMATION.
In Proceedings of the Second International Conference on Computer Vision Theory and Applications - IU/MTSV, pages 76-82
Copyright
c
SciTePress

2006) suggests to consider the high-dimensional face
image data as a set of geometrically related points
lying on a smooth manifold in the high-dimensional
feature space.
Different poses of the head, although captured in
high-dimensional image feature spaces, can be visual-
ized as data points lying on a low-dimensional man-
ifold in the high-dimensional space. Raytchev et al
(Raytchev et al., 2004) stated that the dimension of
this manifold is equivalent to the number of degrees of
freedom in the movement during data capture. For ex-
ample, images of the human face with different angles
of pose rotation (yaw, tilt and roll) can intrinsically
be conceptualized as a 3D manifold in image fea-
ture space. This conceptualization resulted in a host
of dimensionality reduction techniques that are based
on the relative geometry of the data points in high-
dimensional space. This is the idea that underlies the
family of non-linear dimensionality reduction tech-
niques under the umbrella of manifold learning, like
Isomap, Locally Linear Embedding (LLE), Laplacian
Eigenmaps, Local Tangent Space Alignment (LTSA),
etc, which have become popular in recent times.
In prior work in this domain, (Raytchev et al.,
2004) and (Hu et al., 2005) employed a straightfor-
ward approach to learn the non-linear mapping onto
the low-dimensional space through manifold learning,
and estimated the pose angle using a pose parame-
ter map. In the work carried out so far, the pose in-
formation of the given face images is ignored while
computing the embedding. In this light, we propose
a novel improvement to traditional manifold learn-
ing techniques, called the Biased Manifold Embed-
ding approach, which provides a semantic bias to the
manifold-based embedding process, using pose infor-
mation from the given face image data. While the
proposed Biased Manifold Embedding method is il-
lustrated using Isomap in this paper, it can easily be
extended to other manifold learning techniques with
minor adaptations. As broader impact, the work pro-
posed here is a significant contribution to a supervised
approach to manifold-based non-linear dimensional-
ity reduction techniques across all regression prob-
lems.
We discuss the background with a brief descrip-
tion of the Isomap algorithm, followed by related
work and an insight into the significance of our work
in Section 2. Section 3 details the mathematical for-
mulation of the proposed Biased Manifold Embed-
ding method. The experimental setup and the method-
ology of our experiments are briefed in Section 4. The
results of the experiments are discussed in Section 5.
We then discuss the advantages and limitations of the
approach in the concluding section in Section 6, and
provide future directions to this work.
2 BACKGROUND
2.1 Non-linear Dimensionality
Reduction Using Isomap
Finding low-dimensional representations of high-
dimensional data is a common problem in science
and engineering. High-dimensional observations
are prevalent in all fields: images, spectral data,
instrument readings, etc. Techniques like Principal
Component Analysis (PCA) are recognized as linear
dimensionality reduction techniques, because of the
linear projection matrix obtained from the eigen
vectors of the covariance matrix. Techniques like
Multi-Dimensional Scaling (MDS) are grouped un-
der non-linear dimensionality reduction techniques.
However, MDS uses the L2 (Euclidean) distance
between data points in the high-dimensional space
to capture their similarities. If the data points were
to lie on a manifold in the high-dimensional space,
Euclidean distances do not capture the geometric re-
lationship between the data points. In such cases, it is
beneficial to consider the geodesic (along the surface
on which the data points lie) distances between the
data points to obtain a more truthful representation of
the data.
To capture the global geometry of the data points,
Tanenbaum et al (Tanenbaum et al., 2000) proposed
Isomap to compute an isometric low-dimensional
embedding of a given set of high-dimensional data
points (See Algorithm 1).
While Isomap captures the global geometry of the
data points in the high-dimensional space, the dis-
advantage of this family of manifold learning tech-
niques is the lack of a projection matrix to embed out-
of-sample data points after the training phase. This
makes the method more suited for data visualization,
rather than classification problems. However, the ad-
vantage of these techniques to capture the relative ge-
ometry of data points enthuses researchers to adopt
this methodology to solve problems like head pose
estimation, where the data is known to possess geo-
metric relationships in a high-dimensional space. Fig-
ure 1 shows the visualization results of using Isomap
to embed face images onto 2 dimensions. Faces of
10 individuals with 11 pose angles (-75
◦
to +75
◦
in
increments of 15) were used to perform this embed-
ding. The feature space considered here was the space
BIASED MANIFOLD EMBEDDING FOR PERSON-INDEPENDENT HEAD POSE ESTIMATION
77


learning techniques to treat out-of-sample data points.
There has been recent work by (Ridder et al.,
2003) and (Yu and Tian, 2006) to obtain a supervised
approach to manifold learning techniques. However,
their approaches are strictly oriented towards classi-
fication problems, and do not exploit the label infor-
mation as possible for regression problems like head
pose estimation.
2.3 Proposed Approach
While manifold learning techniques like Isomap
capture the global geometrical relationship between
data points in the high-dimensional image feature
space, they do not use the pose label information
of the training data samples. Unlike class labels
in classification problems, pose information can be
viewed as an ordered single-dimensional label with
an established distance metric. This can provide
valuable input to the embedding process.
In this work, we propose a biased manifold-based
embedding for head pose estimation. We use the
given pose information to bias the non-linear embed-
ding to obtain accurate pose angle estimation. The
significance of our contribution is realized in the
fact that the proposed Biased Manifold Embedding
method, although validated in this work with Isomap,
can be extended to other manifold learning techniques
with minor modifications, and in general, can be ap-
plied to all regression problems that use manifold
learning methods. In addition, while most current ap-
proaches use face images sampled with pose angles
at increments of 10-15
◦
(Raytchev et al., 2004), we
use the FacePix database (Little et al., 2005) that in-
cludes images of faces taken at a wide range of pre-
cisely measured pose angles with a readily available
granularity of 1
◦
. This reinforces the validity of our
experiments with the proposed approach.
3 BIASED MANIFOLD
EMBEDDING
In the Biased Manifold Embedding method, we pro-
pose to use the pose angle information of the training
data samples to obtain a more meaningful embedding
with a view to solve the problem of pose estimation.
The fundamental idea of our approach is that face
images with nearer pose angles must be nearer to
each other in the low-dimensional embedding, and
images with farther pose angles are placed farther,
irrespective of the identity of the individual. We
achieve this with a modification to the computation
of the geodesic distance matrix. Since a distance
metric can easily be defined on the pose angle values,
the problem of finding closeness of pose angles is
straight-forward.
The mathematical formulation of the Biased Man-
ifold Embedding method is given below. We would
like the ideal modified geodesic distance between a
pair of data points to be of the form:
˜
D(i, j) = f (P(i, j)) ⊗ D(i, j)
where D(i, j) ( = d
M
in Algorithm 1) is the geodesic
distance between two data points x
i
and x
j
,
˜
D(i, j) is
the modified biased geodesic distance, P(i, j) is the
pose distance between x
i
and x
j
, f is any function of
the pose distance, and ⊗ is a binary operator. If ⊗
was chosen as the multiplication operation, the func-
tion f would be chosen as inversely proportional to
the pose distance, P(i, j). In a more general perspec-
tive, the function f could be picked from the family
of reciprocal functions ( f ∈ F
R
) based on the needs of
an application. In this work, we choose the function
as:
f (P(i, j)) =
1
max
m,n
P(m, n) − P(i, j)
This function could be replaced by an inverse expo-
nential or quadratic function of the pose distance. In
order to ensure that the biased geodesic distance val-
ues are well-separated for different pose distances, we
multiply this quantity by a function of the pose dis-
tance:
˜
D(i, j) =
α(P(i, j))
max
m,n
P(m, n) − P(i, j)
∗ D(i, j)
where the function a is directly proportional to the
pose distance, P(i, j), and is defined in our work as:
α(P(i, j)) = β ∗ |P(i, j)|
where β is a constant of proportionality, and allows
parametric variation for performance tuning. In our
work, we have used the pose distance as the one-
dimensional distance i.e. P(i, j) = |Pi − P j|, where
P
k
is the pose angle of x
k
. In summary, the biased
geodesic distance between a pair of points can be
given by:
˜
D(i, j) =
(
α(P(i, j))
max
m,n
P(m,n)−P(i, j)
∗ D(i, j) P(i, j) 6= 0,
0 P(i, j) = 0.
(1)
Classical MDS is applied on this biased geodesic
distance matrix to obtain the embedding. The pro-
posed modification impacts only the computation of
the geodesic distance matrix, and hence, can easily
BIASED MANIFOLD EMBEDDING FOR PERSON-INDEPENDENT HEAD POSE ESTIMATION
79
be extended to other manifold-based dimensionality
reduction techniques that use the geodesic distance.
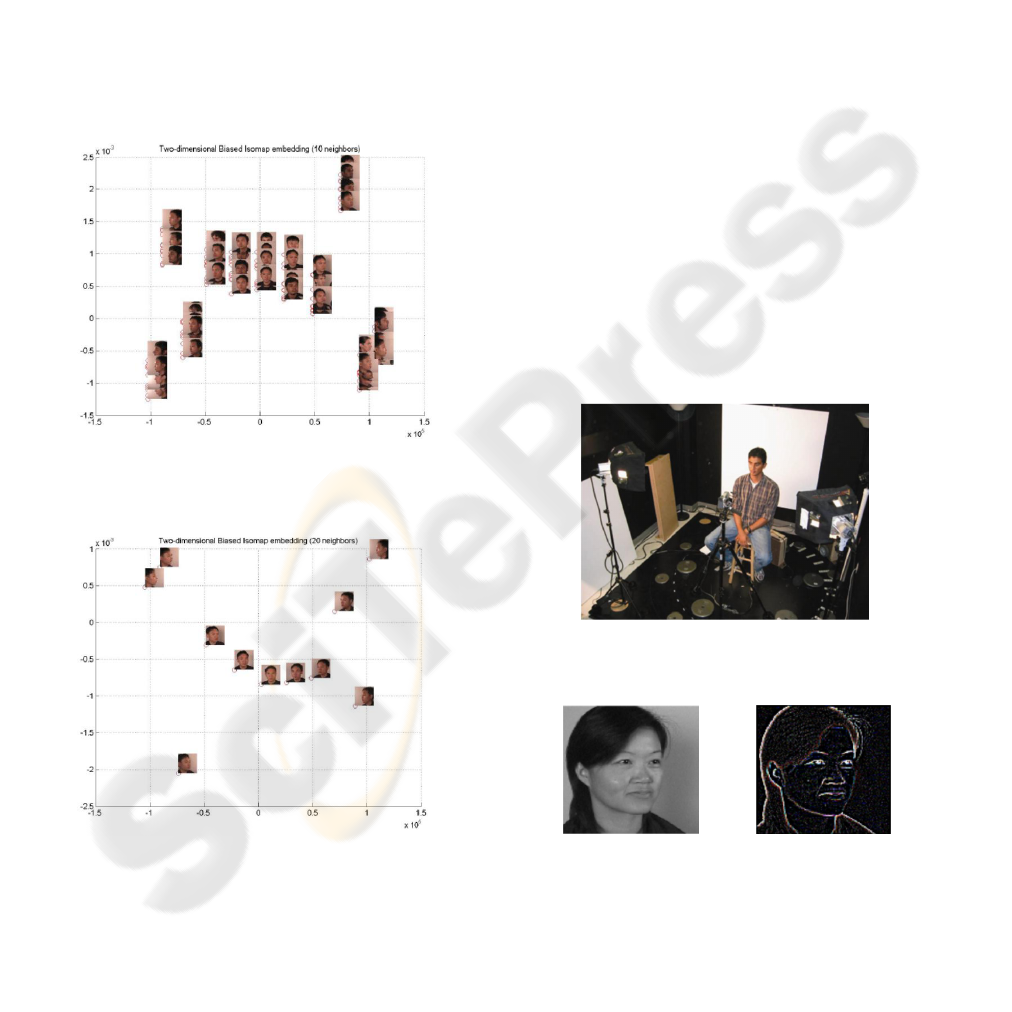
Figure 2 shows the results of using Biased Isomap
to embed the same facial images used in Figure 1 onto
2 dimensions. The embedded images establish the
tendency of the method to elicit person-independent
representations of the pose angles of the given fa-
cial images. As expected from the formulation of the
method (see Figure 2), the face images of all individ-
uals with the same pose angle have merged onto the
same data point in 2 dimensions. This renders an em-
bedding that is more conducive to determine the pose
angle from the face images.
(a) Biased Isomap embedding with 10 neighbors
(b) Biased Isomap embedding with 20 neighbors
Figure 2: Biased Isomap Embedding of face images with
varying poses onto 2 dimensions. Note in 2(b) that all the
face images w ith the same pose angle have merged onto the
same 2D point.
4 EXPERIMENTAL SETUP AND
METHODOLOGY
The proposed Biased Isomap Embedding approach
was compared against the traditional Isomap method
for non-linear dimensionality reduction in the head
pose angle estimation process. We used the FacePix
face database (Little et al., 2005) (see Figure 3) built
at the Center for Cognitive Ubiquitous Computing
(CUbiC), which has face images with precisely mea-
sured pose variation. In this work, we consider a
set of 2184 face images, consisting of 24 individuals
with pose angles varying from -90
◦
to +90
◦
in incre-
ments of 2
◦
. The images were subsampled to 32 x
32 resolution, and different feature spaces of the im-
ages were considered for the experiments. The results
presented here include the grayscale pixel intensity
feature space and the Laplacian of Gaussian (LoG)
transformed image feature space (see Figure 4). The
LoG transform was used since pose variation in face
images is a result of geometric transformation, and
texture information may not be really useful for the
pose estimation problem. This was also reflected in
preliminary experiments conducted with Gabor filters
and Fourier-Mellin transformed images. The images
were subsequently rasterized and normalized.
Figure 3: The data capture setup for FacePix.
(a) Grayscale im-
age
(b) Laplacian of
Gaussian (LoG)
tranformed image
Figure 4: Image feature spaces used for the experiments.
Non-linear dimensionality reduction techniques
like manifold learning do not provide a projection
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
80

matrix to handle test data points. While different
approaches have been used by earlier researchers
to capture the mapping from the high-dimensional
feature space to the low-dimensional embedding, we
adopted a Generalized Regression Neural Network
(GRNN) with Radial Basis Functions to learn the
non-linear mapping. This approach has been adopted
earlier by Zhao et al (Zhao et al., 2005). Additionally,
the parameters involved in training the network (just
the spread of the Radial Basis Function) are minimal,
thereby facilitating better evaluation of the proposed
method. Once the low-dimensional embedding was
obtained, linear multi-variate regression was used to
obtain the pose angle of the test image.
The proposed Biased Isomap Embedding method
was compared with the traditional Isomap approach
using resubstitution and 8-fold cross-validation mod-
els. In the resubstitution model, 100 data points were
randomly chosen from the training sample for the
testing phase. The error in estimation of the pose an-
gle was used as the metric for performance evaluation.
In the 8-fold cross-validation model, face images of
3 individuals were used for the testing phase in each
fold, while all the remaining images were used in the
training phase. In addition to these experiments, the
variation in accuracy of the proposed method with the
embedding dimension and the number of neighbors
for the embedding was studied.
5 RESULTS AND DISCUSSION
The results for the resubstitution model are presented
in Table 1. The improved performance of the Biased
Isomap Embedding method for head pose estimation
is unanimously reflected in the significant reduction
in error values across the image feature spaces. How-
ever, validation using the resubstitution model is pre-
liminary since test samples are picked from the train-
ing sample set itself. For more robust validation, we
implemented 8-fold cross-validation over the images
from 24 individuals. The results of these experiments
are shown in Table 2. The results with the cross-
validation model corroborate our claim of the perfor-
mance gain. Both of these experiments were carried
out with an embedding dimension of 8, with a choice
of 50 neighbors for the embedding. The pose an-
gle estimate error is consistently under 4
◦
, which is a
substantial improvement over earlier work (Raytchev
et al., 2004).
In addition, the performance of the Biased Man-
ifold Embedding was analyzed with varying dimen-
Table 1: Results using the resubstitution model.
Feature Space Error using Error using
traditional Biased
Isomap Isomap
Grayscale 11.39 1.98
Laplacian of Gaussian 8.80 2.31
Table 2: Results using the 8-fold cross-validation model.
Feature Space Error using Error using
traditional Biased
Isomap Isomap
Grayscale 10.55 3.68
Laplacian of Gaussian 9.10 3.38
sions of embedding, and choice of the number of
neighbors used for embedding. Table 3 captures the
results for different embedding dimensions with the
number of neighbors fixed at 50. Table 4 captures
the results for varying number of neighbors for the
embedding with the embedding dimension fixed at 8.
Grayscale pixel intensities of the face images were
used for these independent experiments.
Table 3: Analysis of performance with varying dimensions
of embedding.
Dimension of Error using Error using
Embedding traditional Biased
Isomap Isomap
100 10.41 5.02
50 10.86 5.04
20 11.35 5.04
8 12.96 5.07
5 12.57 5.05
3 16.21 5.66
As evident from the results, the significant reduc-
tion in the error of estimation of pose angle substan-
tiates the effectivness of the proposed approach. In
addition, as the results in Tables 2, 3 and 4 illustrate,
the Biased Manifold Embedding method is robust to
variations in feature spaces, dimensions of embedding
and choice of number of neighbors. While the tradi-
tional Isomap embedding has fluctuating results for
these parameters, the range of error values obtained
for the Biased Manifold Embedding method across
these parameter changes suggests the high stability of
the method, thanks to the biasing of the embedding.
BIASED MANIFOLD EMBEDDING FOR PERSON-INDEPENDENT HEAD POSE ESTIMATION
81

Table 4: Analysis of performance with varying number of
neighbors for embedding.
Number of Error using Error using
Neighbors traditional Biased
Isomap Isomap
30 11.56 5.10
50 12.96 5.06
100 13.83 5.03
200 12.59 5.06
500 14.36 5.07
6 CONCLUSION
We have proposed the Biased Manifold Embedding
method, a novel supervised approach to manifold
learning techniques for regression problems. The
proposed method was validated for accurate person-
independent head pose estimation. The use of pose
information in the manifold embedding process im-
proved the performance of the pose estimation pro-
cess significantly. The pose angle estimates obtained
using this method are accurate, and can be relied upon
with an error margin of 3-4
◦
. Our experiments also
demonstrated that the method is robust to variations in
feature spaces, dimensionality of embedding and the
choice of the number of neighbors for the embedding.
The proposed method can easily be extended from the
current Isomap implementation to cover the envelop
of other manifold learning techniques, and can be de-
veloped as a framework for biased manifold learning
to cater to all regression problems at large.
6.1 Limitations and Future Work
As mentioned earlier, a significant drawback of man-
ifold learning techniques is the lack of a projection
matrix to treat new data points. While we used the
GRNN to learn the non-linear mapping in this work,
there have been other approaches adopted by various
researchers. Bengio et al (Bengio et al., 2004) pro-
posed a mathematical formulation focussed to over-
come this problem. We plan to use these approaches
to support the validity of our approach. Besides, we
intend to extend the Biased Manifold Embedding im-
plementation to LLE and Laplacian Eigenmaps to es-
tablish it as a framework for non-linear dimensional-
ity reduction in regression applications. On a lesser
significant note, another limitation of the current ap-
proach is that the number of neighbors chosen to ob-
tain the embeddding has to be more than the num-
ber of individuals in the face images. This is because
different individuals with the same pose angle are as-
signed a zero distance value in the biased geodesic
distance matrix. We plan to modify our algorithm to
overcome this limitation. In addition, the function of
pose distance used to bias the geodesic distance ma-
trix can be varied to study the applicability of different
reciprocal functions for pose estimation.
REFERENCES
Bengio, Y., Paiement, J. F., Vincent, P., and Delalleau, O.
(2004). Out-of-sample extensions for lle, isomap,
mds, eigenmaps, and spectral clustering.
Brown, L. and Tian, Y.-L. (2002). Comparative study of
coarse head pose estimation.
Chen, L., Zhang, L., Hu, Y. X., Li, M. J., and Zhang, H. J.
(2003). Head pose estimation using fisher manifold
learning. In IEEE International Workshop on Analy-
sis and Modeling of Faces and Gestures (AMFG03),
pages 203–207, Nice, France.
Fu, Y. and Huang, T. S. (2006). Graph embedded analysis
for head pose estimation. In 7th International Con-
ference on Automatic Face and Gesture Recognition,
Southampton, UK.
Hu, N., Huang, W., and Ranganath, S. (2005). Head pose
estimation by non-linear embedding and mapping. In
IEEE International Conference on Image Processing,
page 342345, Genova.
Little, G., Krishna, S., Black, J., and Panchanathan, S.
(2005). A methodology for evaluating robustness
of face recognition algorithms with respect to vari-
ations in pose and illumination angle. In Proceed-
ings of IEEE International Conference on Acoustics,
Speech and Signal Processing, page 8992, Philadel-
phia, USA.
Raytchev, B., Yoda, I., and Sakaue, K. (2004). Head
pose estimation by nonlinear manifold learning. In
17th International Conference on Pattern Recognition
(ICPR04), Cambridge, UK.
Ridder, D. d., Kouropteva, O., Okun, O., Pietikainen, M.,
and Duin, R. P. (2003). Supervised locally linear em-
bedding. In International Conference on Artificial
Neural Networks and Neural Information Processing,
333341.
Tanenbaum, J. B., Silva, V. d., and Langford, J. C. (2000).
A global geometric framework for nonlinear dimen-
sionality reduction. Science, 290(5500):23192323.
Wenzel, M. T. and Schiffmann, W. H. (2005). Head pose
estimation of partially occluded faces. In Second
Canadian Conference on Computer and Robot Vision
(CRV05), page 353360, Victoria, Canada.
Yu, J. and Tian, Q. (2006). Learning image manifolds by
semantic subspace projection. In ACM Multimedia,
Santa Barbara, CA, USA.
Zhao, Q., Zhang, D., and Lu, H. (2005). Supervised lle in
ica space for facial expression recognition. In Interna-
tional Conference on Neural Networks and Brain (IC-
NNB05), volume 3, page 19701975, Beijing, China.
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
82
