
AN ATTENTION-BASED METHOD FOR EXTRACTING SALIENT
REGIONS OF INTEREST FROM STEREO IMAGES
Oge Marques, Liam M. Mayron, Daniel Socek
Department of Computer Science and Engineering, Florida Atlantic University, Boca Raton, FL - 33431, USA
Gustavo B. Borba, Humberto R. Gamba
CPGEI, Universidade Tecnol
´
ogica Federal do Paran
´
a, Av. Sete de Setembro 3165, Curitiba-PR, Brazil
Keywords:
Image segmentation, stereo vision, visual attention.
Abstract:
A fundamental problem in computer vision is caused by the projection of a three-dimensional world onto one
or more two-dimensional planes. As a result, methods for extracting regions of interest (ROIs) have certain
limitations that cannot be overcome with traditional techniques that only utilize a single projection of the
image. For example, while it is difficult to distinguished two overlapping, homogeneous regions with a single
intensity or color image, depth information can usually easily be used to separate the regions. In this paper
we present an extension to an existing saliency-based ROI extraction method. By adding depth information
to the existing method many previously difficult scenarios can now be handled. Experimental results show
consistently improved ROI segmentation.
1 INTRODUCTION
Extracting regions of interest (ROIs) from digital
images represents one of the fundamental tasks in
computer vision. The problem of extracting ROIs
from digital images of natural scenes is often ex-
acerbated by the loss of information caused by a
two-dimensional projection of the three-dimensional
real world. Consequently, most methods have dif-
ficulty distinguishing homogeneous overlapping re-
gions caused by partial occlusion, or separating re-
gions belonging to the background from those belong-
ing to the foreground.
In this paper we present a method for extract-
ing salient regions of interest from stereo images.
Our approach represents an extension to an existing
attention-based ROI extraction method proposed in
(Marques et al., 2007), which relies on two comple-
mentary computational models of human visual atten-
tion, (Itti et al., 1998) and (Stentiford, 2003). These
models provide important cues about the location of
the most salient ROIs within an image. By incorpo-
rating the estimated depth information obtained from
left and right stereo images, our method can success-
fully cope with the aforementioned extraction prob-
lems, resulting in a more robust and versatile method.
2 THE PROPOSED METHOD
The proposed method combines a saliency-based ROI
extraction method with depth map information. This
Section presents background information on both top-
ics and outlines the proposed solution.
Much of the visual information our eyes sense is
discarded. Instead,
Marques O., M. Mayron L., Socek D., B. Borba G. and R. Gamba H. (2007).
AN ATTENTION-BASED METHOD FOR EXTRACTING SALIENT REGIONS OF INTEREST FROM STEREO IMAGES.
In Proceedings of the Second International Conference on Computer Vision Theory and Applications - IU/MTSV, pages 294-297
Copyright
c
SciTePress
tiford, 2003) through a series of morphological op-
erations. The model produces one or more extracted
regions of interest.
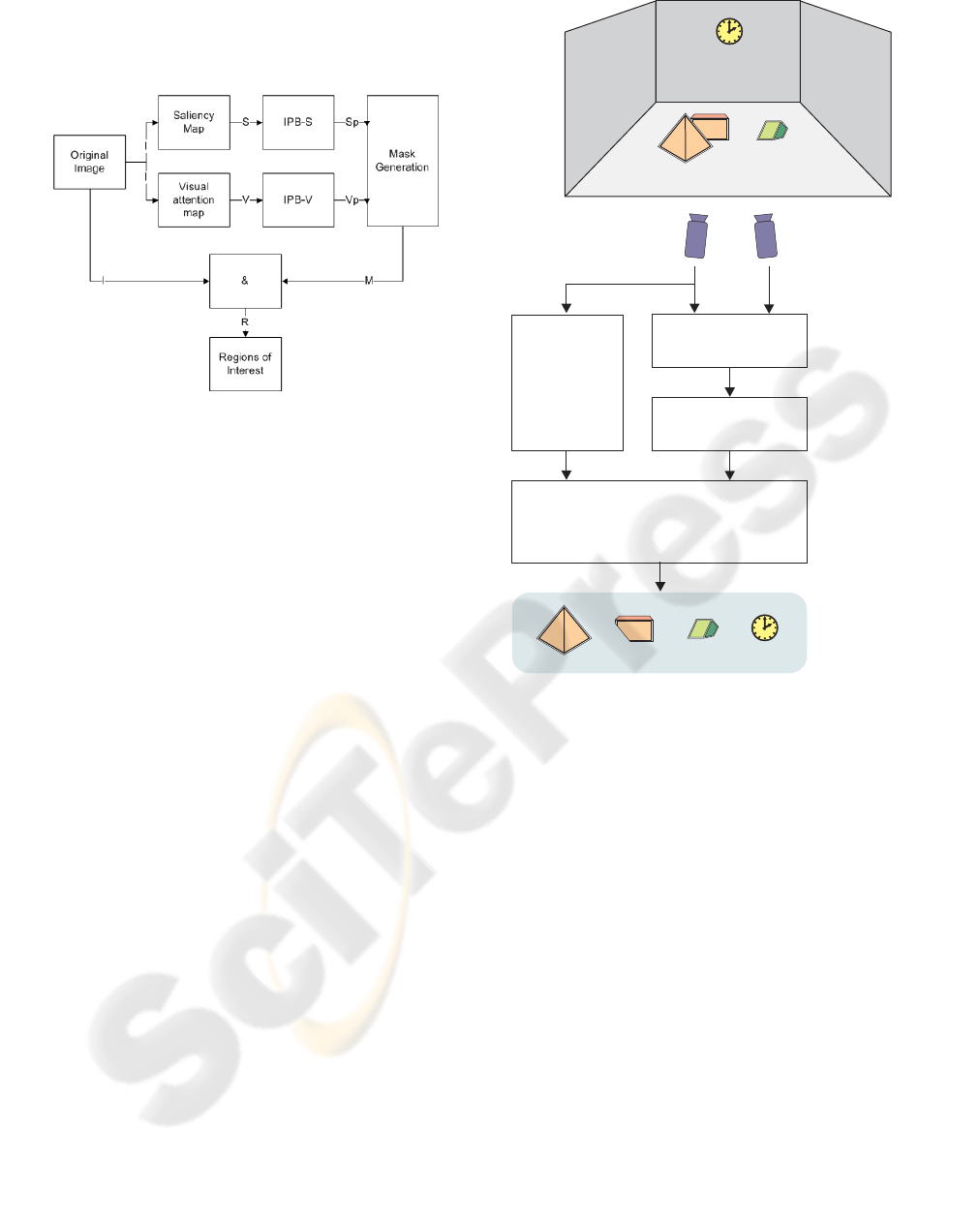
Figure 1: General block diagram of the 2D ROI extraction
method.
Figure 1 shows an overview of the 2D ROI extrac-
tion method. The saliency map (Itti-Koch) (S) and vi-
sual attention map (Stentiford) (V) are generated from
the original image. Post-processing is performed in-
dependently on each in order to remove stray points
and prune potential regions. Then, the remaining
points in the processed saliency map are used to target
regions of interest that remain on the visual attention
map. The result is a mask (M) that can be used to
extract the regions of interest (R) from the original
image. This process is detailed in (Marques et al.,
2007).
There are certain cases where the previous method
does not work. When objects are occluded or overlap-
ping they may appear as a single region when inspect-
ing a single 2D projection of the view. Only with a
separate view can enough information of the original
3D scene be reconstructed to determine the relative
depth of the occluding objects. Convesely, relying
only on depth information is also not enough to prop-
erly determine a region of interest. A bright poster
on a flat wall, for example, would be ignored if only
depth information were used, as it rests on the same
plane as the wall. As a result, we propose a combi-
nation of both methods, mitigating the weaknesses of
each.
In (Birchfield and Tomasi, 1999), the authors pro-
posed fast and effective algorithm for depth estima-
tion from stereo images. Unlike other similar ap-
proaches, such as (Cox et al., 1996), the approach of
Birchfield and Tomasi achieves optimal performance
mainly by avoiding subpixel resolution with a mea-
sure that is insensitive to image sampling. The depth
estimation phase of our method relies on this compu-
tational approach.
Depth
image computation
Left
camera
n-level nonlinear
quantization
Saliency/depth-based ROI extraction
Saliency-
based
ROI
mask
generation
Right
camera
I
L
I
R
D
D
Q
M
R
r
R
1
d
a
R
1
b
R
2
b
R
1
n
Figure 2: General block diagram of the 3D ROI extraction.
According to Figure 2, the scene is first acquired
by two properly-positioned and adjusted cameras, so
that the scanlines are the epipolar lines. The left
and right stereo images, I
L
and I
R
are processed
by Birchfield-Tomasi disparity estimation algorithm.
The output disparity map D is then nonlinearly quan-
tized within n levels, resulting in output image D
Q
.
The left channel image, I
L
, is also processed by the
existing 2D saliency-based ROI segmentation algo-
rithm that produces a binary mask M corresponding
to the salient regions of the image (Figure 1). In the
last stage of the algorithm, M and D
Q
are submit-
ted to the saliency/depth-based ROI extraction block,
which combines both images in order to segment the
ROIs (R
δ
r
) and label them according to their respec-
tive depths in the real scene. δ is the quantized depth,
with δ ∈ {a, . . . , n} and r is an ROI at a depth δ.
In the example shown in Figure 2, the objects
(ROIs) belong to either foreground, middle, or back-
ground. In the output at the bottom of the figure the
pyramid within the foreground plane is labeled with
R
a
1
, the partially occluded parallelepiped and the green

solid, at the same middle plane, are labeled with R
b
1
and R
b
2
. Finally, the clock in the background is la-
beled with R
n
1
.
Under normal conditions depth images are rela-
tively efficient in discriminating objects at the frontal
planes of the scene but they generally do not have suf-
ficient resolution to capture flat objects in the back-
ground or even common objects on a distant plane.
On the other hand, a saliency-based ROI identifica-
tion algorithm can capture such objects, but they do
not account for relative object depth within the scene.
The objective is to combine the information provided
by both salient regions and depth cues to improve ROI
extraction.
In Figure 2, a purely saliency-driven ROI extrac-
tion algorithm tends to identify both light-orange ob-
jects as a single region. However, using depth infor-
mation, it is possible to divide this region, discrim-
inating the two objects. Another benefit of this ap-
proach is the possibility of extracting objects such as
the watch in the background of Figure 2. While algo-
rithms for depth estimation are not able to discrimi-
nate the watch plane from the wall plane (their depth
is too similar), a saliency-driven ROI extraction can
segment that object. Using only depth images the
watch would not be captured.
3 COMPONENTS
The following is a description of the system compo-
nents from Figure 2.
Depth Images
The disparity maps generated by the Birchfield-
Tomasi method are represented as 256-level grayscale
images. Darker (lower) values indicate further dis-
tances, and vice versa. In particular, purely black val-
ues denote the background plane.
Nonlinear Quantization
An n-level (L
1
, ... , L
n
) quantization is obtained and
applied to the disparity map according to Equation 1.
Level L
1
identifies the depth closest to the cameras
and level L
n
denotes the depth farthest depth from
camera (the background).
D
Q
(x, y) =
L
n
if D(x, y) = [0 T
1
),
L
n−1
if D(x, y) = [T
1
T
2
),
.
.
.
L
1
if D(x, y) = [T
n−1
255].
(1)
where T
i
are the selected threshold values.
Saliency-based Roi Mask
Salient regions of interest are extracted from the left
image using the method described in (Marques et al.,
2007). This method was modified in the original
saliency-driven ROI extraction algorithm to refine
some of the thresholds used to determine relative ob-
ject size.
Roi Extraction
The ROI extraction stage combines images M and D
Q
.
Its goal is to segment and label the ROIs according to
their depths in the real scene. First, an AND opera-
tion between grayscale image D
Q
and mask M is per-
formed, originating a grayscale
D image. This image
is then used to perform a depth decomposition accord-
ing to Equation 2.
D
δ
=
1 if
D (x, y) = L
δ
,
0 otherwise
(2)
where
D
δ
are the decomposed depths binary images.
δ is the depth, with δ ∈ {1, . . . , n}.
After that, ROIs can be effectively extracted. First,
decomposed depth image
D
1
is submitted to a set of
morphological operations, denoted by m(·), in Equa-
tion 3.
R
1
= m(
D
1
) (3)
R
1
is a binary image where the white regions corre-
sponds to ROIs into depth 1, that is, those that are
closest to the camera. Function m(·) performs the fol-
lowing sequence: closing, region filling, pruning, and
small blobs elimination.
The remaining R
δ
for each decomposed depth are
sequentially computed, from δ = 2 to δ = n, according
to Equation 4
R
δ
= m
D
δ
"
δ−1
k=1
R
k
#
c
!
(4)
where [·]
c
means the complement operation. Note that
the computation of a deeper R
δ
takes into account the
depths before it. This operations gives preference to
closer regions of interest over the further ones.
Each image R
δ
can have a set of ROIs, denoted by:
{R
δ
} = {R
δ
1
, . . . , R
δ
r
} (5)
where r is the number of ROIs in the depth δ, with
r ≥ 0.

(a) (b) (c) (d)
Figure 3: Results for occluding salient objects in the foreground and distracting salient objects in the background:
(a) original left stereo image; (b) highlighted ROI using saliency-based mask M; (c) highlighted pseudo-colored nonlin-
early quantized depth image (D
Q
) using binary mask M. From the closest to the deepest plane: red, green, blue; and (d) final
ROIs highlighted in the actual image.
4 EXPERIMENTAL RESULTS
We illustrate the performance of our algorithm with
a setting (Figure 3) consisting of stereo images cap-
tured in laboratory environment with two aligned
identical cameras fixed on a professional stereo
stand. This and other stereo image pairs along
with the experimental results are currently posted at
http://mlab.fau.edu/stereo/roi3d.zip
.
In our experiments, a 3-level (L
1
, L
2
, L
3
) quanti-
zation was used, according to Equation 1, while the
threshold values were obtained empirically: T
1
= 11
and T
2
= 23.
Figure 3 shows a case in which occluding salient
objects in the foreground and distracting objects in
the background are segmented. Note that there is a
bright yellow distracter in the foreground that is not
perceived as such by the algorithm, resulting in a false
negative. It can be observed that while the 2D ROI ex-
traction fails to discriminate between two foreground
objects and fails to identify background objects as
such, our proposed algorithm successfully discrimi-
nates between the two foreground ROIs and identifies
all background ROIs.
5 CONCLUSIONS
Object and region segmentation from 2D data is not
always a straightforward task. In particular, it can
be impossible to segment occluded object because of
the depth information that is lost. In this work we
extended a previously proposed method for 2D re-
gion of interest extraction with depth information. A
disparity map was generated from two views using
the method proposed by Birchfield-Tomasi (Birch-
field and Tomasi, 1999). Using this depth information
we were able to differentiate occluding regions of in-
terest. Our experiments demonstrate the promise of
this approach but stress the need for nonlinear quan-
tization thresholds of the disparity map for successful
results. We are continuing work on this approach by
creating a method of automatically determining these
quantization thresholds and extending it to a variety of
applications. We are currently obtaining quantitative
results to further validate our method.
ACKNOWLEDGEMENTS
This research was partially sponsored by UOL
(www.uol.com.br), through its UOL Bolsa Pesquisa
program, process number 200503312101a.
REFERENCES
Birchfield, S. and Tomasi, C. (1999). Depth discontinu-
ities by pixel-to-pixel stereo. International Journal of
Computer Vision, 35(3):269–293.
Cox, I., Hingorani, S., Rao, S., and Maggs, B. (1996). A
maximum likelihood stereo algorithm. Computer Vi-
sion and Image Understanding, 63(3):542–567.
Itti, L., Koch, C., and Niebur, E. (1998). A model of
saliency-based visual attention for rapid scene anal-
ysis. IEEE Trans. on PAMI, 20(11):1254–1259.
Marques, O., Mayron, L. M., Borba, G. B., and Gamba,
H. R. (2007). An attention-driven model for group-
ing similar images with image retrieval applications.
EURASIP Journal on Applied Signal Processing.
Stentiford, F. (2003). An attention based similarity mea-
sure with application to content-based information re-
trieval. In Proceedings of the Storage and Retrieval
for Media Databases Conference, SPIE Electronic
Imaging, Santa Clara, CA.
Styles, E. A. (2005). Attention, Perception, and Memory:
An Integrated Introduction. Taylor & Francis Rout-
ledge, New York, NY.
