
STATISCAL-BASED SKIN CLASSIFIER FOR
OMNI-DIRECTIONAL IMAGES
Asaf Shupo, Bill Kapralos and Miguel Vargas Martin
University of Ontario Institute of Technology
2000 Simcoe Street North, Oshawa, Ontario, Canada. L1H 7K4
Keywords:
Skin detection, surveillance, omni-directional video sensing, maximum likelihood estimator.
Abstract:
This paper describes the development of a simple, video-based system capable of efficiently detecting human
skin in images captured with an omni-directional video sensor. The video sensor is used to provide a view of
the entire visual hemisphere thereby providing multiple dynamic views of a scene. Color models of both skin
and non-skin were constructed with images obtained with the omni-directional video sensor. Using a stochastic
weak estimator coupled with a linear classifier, the system is capable of distinguishing omni-directional images
that contain human skin from those that do not. Results indicate that the system is able to accomplish this task
in a simple and computationally efficient manner. The ability to obtain an image of the entire scene from a
single viewpoint using the omni-directional video sensor and determine whether the image contains human
skin (e.g., one or more humans) in a simple and efficient manner is practical as a precursor for a number of
applications including teleconferencing, remote learning, and video surveillance, the application of interest in
this work.
1 INTRODUCTION
The area of human detection in the visual domain is
rather large, well investigated, and has many practi-
cal applications including surveillance (Boult et al.,
1998), video teleconferencing (Kapralos et al., 2003),
and face detection (Herpers et al., 1999). A good,
economical human detection/tracking system must be
able to locate humans quickly and reliably in the pres-
ence of noise and other objects in the environment.
It must run fast, efficiently (e.g., run in real-time),
and operate using inexpensive camera and computer
equipment (Bradski, 1998). Skin color is often pro-
posed as an economical and efficient cue to detecting
humans in the visual domain. Color is the simplest at-
tribute in a set of pixels comprising the image (Jones
and Rehg, 1998) and does not require extensive com-
putational processing to compute. This allows a sys-
tem utilizing color cues to operate in real-time. In ad-
dition, the color of an object may be used as an iden-
tifying feature that is local to the object and largely
independent of the view and resolution. As a result,
the use of color information may be used to detect ob-
jects from differing viewpoints (Swain and Ballard,
1991). In general, color cues are invariant to par-
tial occlusion, rotation in depth, scale and resolution
changes (Raja et al., 1998). Furthermore, there are
various fast and simple color-based human detection
and tracking systems available (Chai and Ngan, 1999;
Chopra et al., 2006; Herpers et al., 1999; Jones and
Rehg, 1998; Kapralos et al., 2003; Shupo et al., 2006;
Stiefelhagen et al., 1999; Hans et al., 1999; Yang and
Waibel, 1996).
Although skin detection is itself a simple and ef-
ficient process, many of the existing systems employ
traditional cameras with a limited field of view. Us-
ing such cameras, in order to capture a view of the
entire visual hemisphere, multiple stationary cameras
may be used or a single camera may be panned to
different directions. Furthermore, in various appli-
cations (such as video teleconferencing) the subject
(person) may physically move into the view of a sta-
tionary camera. Both approaches can greatly increase
the computational and time requirements potentially
making these approaches impractical for real-time op-
erations. Rather than having a user move into the
camera’s field of view, having multiple cameras or
focusing the camera in different directions, an omni-
11
Shupo A., Kapralos B. and Vargas Martin M. (2007).
STATISCAL-BASED SKIN CLASSIFIER FOR OMNI-DIRECTIONAL IMAGES.
In Proceedings of the Second International Conference on Computer Vision Theory and Applications, pages 11-17
DOI: 10.5220/0002060800110017
Copyright
c
SciTePress
directional video sensor (Cyclovision’s ParaCamera
system (Nayar, 1997; Baker and Nayar, 1999)) can
be utilized instead. The ParaCamera captures a 360
◦
(hemispherical) view from a single viewpoint.
In this paper we describe an approach that is used
to classify ParaCamera images as either i) containing
skin or ii) not containing skin. Color models of both
skin and non-skin were constructed with images ob-
tained with the ParaCamera. Using a stochastic esti-
mator coupled with a linear classifier, results suggest
the system is capable of distinguishing images that
contain human skin from images that do not. This
work is part of an ongoing research project investigat-
ing the fundamental issues related to the development
of a video-based surveillance and monitoring system
capable of locating humans within a scene. Humans
within a scene may represent potential intruders and
allows them to be automatically detected in an effi-
cient manner can allow further, more complex actions
to be taken. Such actions may include focusing a high
resolution pan-tilt camera on to the potential intruder,
and alerting a human operator.
The remainder of the paper is organized as fol-
lows. Section 2 provides greater details regarding the
proposed system. In particular, further details regard-
ing the ParaCamera and a detailed description of the
statistical skin detection method is provided. Results
of several experiments conducted to provide an indi-
cation of the effectiveness of method are provided in
Section 3. Finally, concluding remarks and plans for
future research are presented in Section 4.
2 THE APPROACH
2.1 ParaCamera Omni-Directional
Camera System
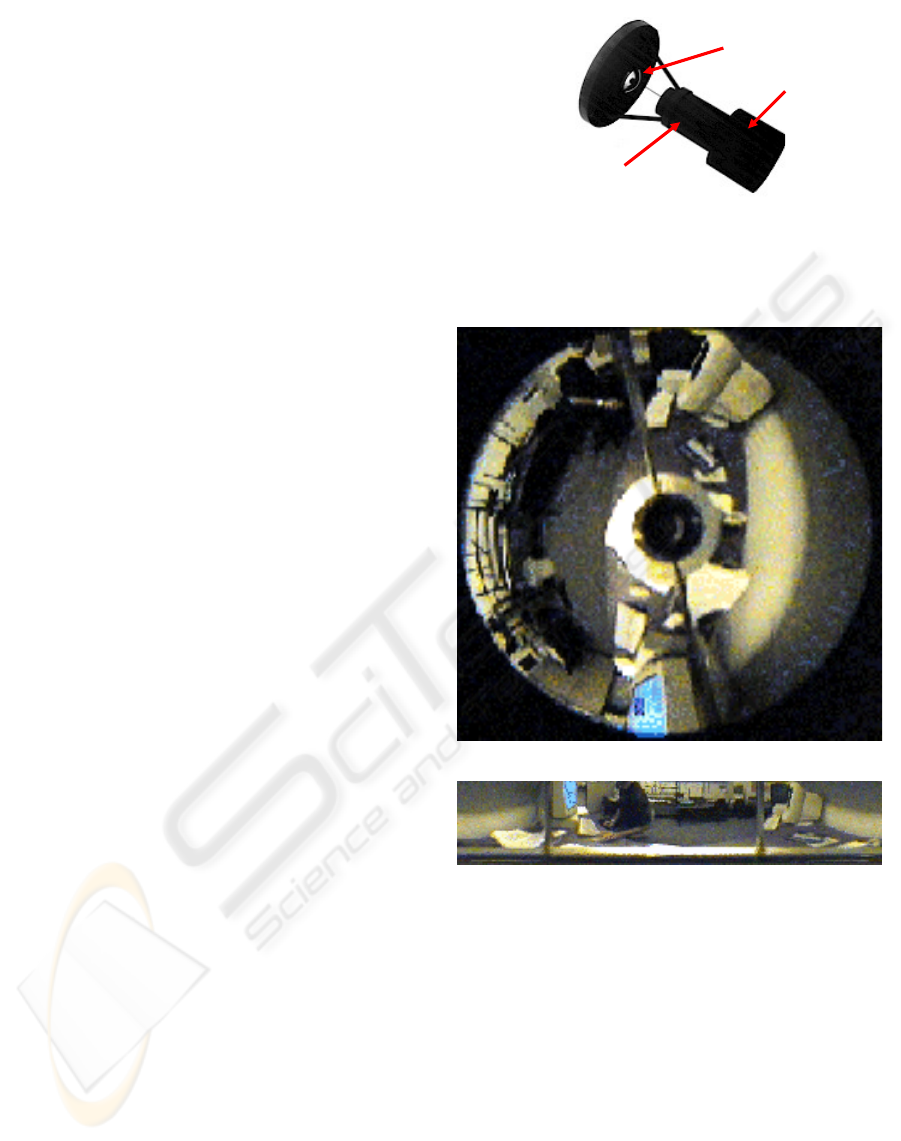
Cyclovision’s ParaCamera omni-directional camera
consists of a high precision paraboloidal mirror and
a combination of special purpose lenses (see Figure
1). By aiming a suitably equipped camera at the face
of the paraboloidal mirror, the optics assembly per-
mits the ParaCamera to capture a 360
o
hemispherical
view from a single viewpoint. Once the hemispherical
view has been obtained, it may be easily un-warped
(Peri and Nayar, 1997) producing a panoramic view.
From this panoramic view, a perspective view of any
size corresponding to portions of the scene can be eas-
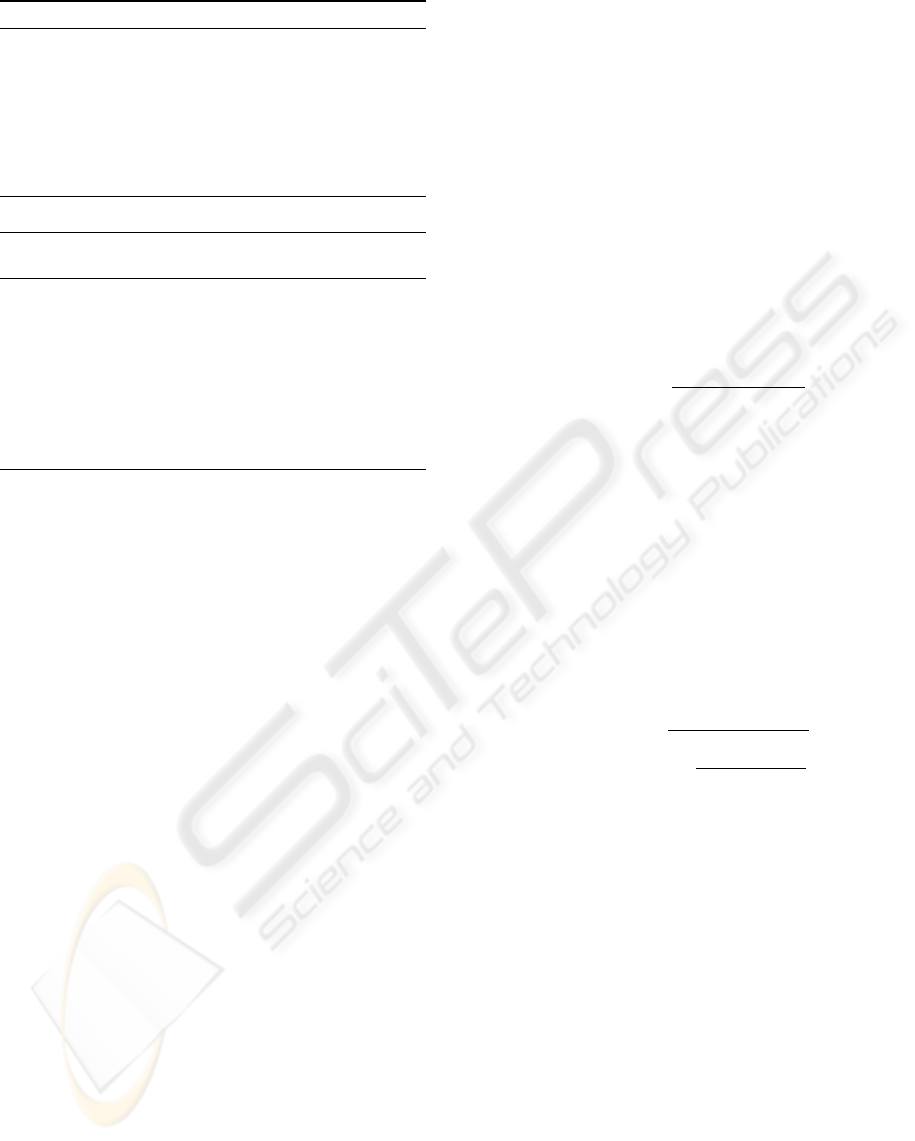
ily extracted. An example of both hemispherical and
panoramic images are illustrated in Figure 2. Ex-
amination of the images shown in Figure 2 illustrates
the distortion and varying resolution inherent with im-
Paraboloidal
mirror
Paracamera lens
assemebly
Digital
camera
Figure 1: Cyclovision’s ParaCamera omni-directional video
sensor. The camera is aimed at the face of a paraboloidal
mirror allowing it to capture a view of the entire visual
hemisphere from a single viewpoint.
directional video sensor (Cyclovision’s ParaCamera
system (Nayar, 1997; Baker and Nayar, 1999)) can
be utilized instead. The ParaCamera captures a 360
◦
(hemispherical) view from a single viewpoint.
In this paper we describe an approach that is used
to classify ParaCamera images as either i) containing
skin or ii) not containing skin. Color models of both
skin and non-skin were constructed with images ob-
tained with the ParaCamera. Using a stochastic esti-
mator coupled with a linear classifier, results suggest
the system is capable of distinguishing images that
contain human skin from images that do not. This
work is part of an ongoing research project investigat-
ing the fundamental issues related to the development
of a video-based surveillance and monitoring system
capable of locating humans within a scene. Humans
within a scene may represent potential intruders and
allows them to be automatically detected in an effi-
cient manner can allow further, more complex actions
to be taken. Such actions may include focusing a high
resolution pan-tilt camera on to the potential intruder,
and alerting a human operator.
The remainder of the paper is organized as fol-
lows. Section 2 provides greater details regarding the
proposed system. In particular, further details regard-
ing the ParaCamera and a detailed description of the
statistical skin detection method is provided. Results
of several experiments conducted to provide an indi-
cation of the effectiveness of method are provided in
Section 3. Finally, concluding remarks and plans for
future research are presented in Section 4.
2 THE APPROACH
2.1 ParaCamera Omni-Directional
Camera System
Cyclovision’s ParaCamera omni-directional camera
consists of a high precision paraboloidal mirror and
a combination of special purpose lenses (see Figure
1). By aiming a suitably equipped camera at the face
of the paraboloidal mirror, the optics assembly per-
mits the ParaCamera to capture a 360
o
hemispherical
view from a single viewpoint. Once the hemispherical
view has been obtained, it may be easily un-warped
(Peri and Nayar, 1997) producing a panoramic view.
From this panoramic view, a perspective view of any
size corresponding to portions of the scene can be eas-
ily extracted. An example of both hemispherical and
panoramic images are illustrated in Figure 2. Ex-
amination of the images shown in Figure 2 illustrates
the distortion and varying resolution inherent with im-
ages obtained using a ParaCamera. In the hemispher-
ical view (see Figure 2(a)), the resolution decreases
Paraboloidal
mirror
Paracamera lens
assemebly
Digital
camera
Figure 1: Cyclovision’s ParaCamera omni-directional video
sensor. The camera is aimed at the face of a paraboloidal
mirror allowing it to capture a view of the entire visual
hemisphere from a single viewpoint.
(a) Hemispherical view.
(b) Panoramic view
Figure 2: Sample ParaCamera images. (a) Hemispherical
view. (b) A simple procedure allows the hemispherical view
to be transformed into a panoramic view.
as we move away from the center of the image. Fur-
ther examination also reveals that given the low reso-
lution inherent in these images, fine details (e.g., fa-
cial features) cannot generally be detected. This can
be a limitation with many of the existing computer vi-
sion/image processing algorithms currently available
(e.g., face detection by locating both eyes). However,
the low resolution inherent with ParaCamera images
does not pose a problem for this application. As will
be described below, in this work the goal is to em-
(a) Hemispherical view.
(b) Panoramic view
Figure 2: Sample ParaCamera images. (a) Hemispherical
view. (b) A simple procedure allows the hemispherical view
to be transformed into a panoramic view.
ages obtained using a ParaCamera. In the hemispher-
ical view (see Figure 2(a)), the resolution decreases
as we move away from the center of the image. Fur-
ther examination also reveals that given the low reso-
lution inherent in these images, fine details (e.g., fa-
cial features) cannot generally be detected. This can
be a limitation with many of the existing computer vi-
sion/image processing algorithms currently available
(e.g., face detection by locating both eyes). However,
the low resolution inherent with ParaCamera images
does not pose a problem for this application. As will
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
12

be described below, in this work the goal is to em-
ploy a ParaCamera to obtain a fast overview of the
scene while flagging potential areas of human activ-
ity. Other higher resolution imaging sensors can then
be focused on these potential areas of interest in order
to provide further information.
The ability of an omni-directional video sensor
such as the ParaCamera to capture an image of the
entire visual hemisphere makes it very attractive for
a variety of applications. Such applications include
the capture the simultaneous video of each partici-
pant in a small group meeting (Stiefelhagen et al.,
1999; Yong et al., 2001), surveillance (Boult et al.,
1998; Gutchess et al., 2000), autonomous robot nav-
igation (Zheng and Tsuji, 1992), virtual reality (Ya-
sushi, 1999), telepresence (Yasushi, 1999), video-
teleconferencing (Kapralos et al., 2003) and pipe in-
spection (Basu and Southwell, 1995).
2.2 Skin Classification
Skin detection is performed using an estimator for
feature extraction coupled with a linear classifier. The
estimators considered in this work are the stochas-
tic learning weak estimator (SLWE) (Oommen and
Rueda, 2006) and the maximum likelihood estimator
(MLE) (Duda et al., 2000). The SLWE is considered
to be more accurate in dealing with non-stationary
data (e.g., a sequence of images capturing the mo-
tion of a subject), which is a relevant consideration
when considering video surveillance. The classifica-
tion process consists of two phases: i) the training
phase and ii) the testing phase. In the training phase,
two feature vectors are used to classify the skin and
non-skin images (e.g., images that contain human skin
regions and images that do not respectively). By ex-
tracting statistical properties from the labeled images
(i.e., those that have been sorted into the skin and
non-skin vectors), we are able to conduct the exper-
iments using this as a basis of comparison. The fea-
tures that were extracted from the training phase with
any needed adjustments were input into the classifier
that we used in the validation phase of the SLWE. The
experiments were then repeated for the MLE (the es-
timators are discussed in the following sections). The
training phase, as pointed out above, aims first to ex-
tract the statistical features of the images correspond-
ing to all images in the training dataset, producing one
feature vector for each class. The procedure shown in
Algorithm 1 produces these two feature vectors when
it is run for each dataset (e.g., skin and non-skin).
The algorithm is used separately for the skin and
non-skin training datasets. The output of the algo-
rithm is a feature vector, an array V
◦
or V
n
, one for the
Algorithm 1 Procedure for determining the fea-
ture vectors.
1: Initialize an array B of counters to zero
2: For each image I of the training dataset of class j:
3: For each 8-bit byte b
j
of I:
4: Increment B[b
j
] by 1
5: Initialize an array V
j
of probabilities to zero.
6: For k = 0 to 255
7: Set V
j
[k] = B[b
j
] / total number of 8-bit bytes of
the set of images
skin and non-skin dataset, respectively. The appro-
priate statistical characteristics are initially extracted
and the feature vectors V
◦
and V
n
are formed. The
next step is to use an estimator to extract the features
of the image to be classified, namely a vector V
0
. The
classification rule consists of assigning an unlabeled
package to the class, skin or non-skin, that minimizes
the distance between V
0
and the trained arrays V
◦
or
V
n
. Two metrics have been used for this purpose with
both the ML and SLWE algorithms (described later
in greater detail): i) the Euclidean distance, and ii)
the weighted Euclidean distance. Both metrics are
used to calculate the distance between the two labeled
vectors, and once the distance has been determined, a
classification is made as to whether an image contains
skin or non-skin (e.g., the image is classified as being
either “skin” or “non-skin”). Before using a classifi-
cation metric, statistical characteristics of the datasets
must be extracted. In the following sections, the MLE
and SLWE used to extract such features are described
in greater detail. For this purpose, we obtain the fre-
quency of occurrence for each of the symbols (from 0
to 255) for a given image that has to be classified.
2.2.1 The Maximum Likelihood Estimator
The maximum likelihood estimator (MLE) is a tradi-
tional technique that aims to maximize the likelihood
that a given sample generates using a specific prob-
abilistic model, either parametric or non-parametric.
We assume that we are dealing with a multinomial
random variable with 256 possible realizations (one
symbol for each 8-bit ASCII value). It has been
shown that the likelihood is maximized when the esti-
mate for each symbol is given by the frequency coun-
ters divided by the total number of bytes in the image
(Duda et al., 2000) (see Algorithm 2).
The algorithm produces an array V
0
that contains
the estimates for each (8-bit) byte in the testing image
H. That vector V
0
is then input to the classification
rule, which decides on the class based on a distance
function and the trained feature vectors.
STATISCAL-BASED SKIN CLASSIFIER FOR OMNI-DIRECTIONAL IMAGES
13
Algorithm 2 The maximum likelihood estimator.
1: For each image H captured by the ParaCamera:
2: Initialize an array C of counters to zero
3: For each 8-bit byte b
j
of H:
4: Increment C[b
j
] by 1
5: Initialize an array V
0
of probabilities to zero
6: For k = 0 to 255
7: Set V
0
[k] = C[b
j
] / total number of 8-bit bytes of
this image.
Algorithm 3 The stochastic learning weak esti-
mator.
1: For each image H captured by a ParaCamera:
2: Initialize each entry of the feature
vector V
0
to 1/256
3: For each 8-bit byte b
j
of H:
4: For k = 0 to 255
5: If i 6= bi then
6: V
0
[k] = λ ×V
0
[k]
7: Else
8: V
0
[b
i
] = V
0
[b
i
] + (1 − λ)
∑
k6=i
V
0
[k]
2.2.2 The Stochastic Learning Weak Estimator
Estimators like the one described by the MLE algo-
rithm outlined in the previous section suffer from a
lack of ability to capture quick changes in the dis-
tribution of the source data (e.g., dealing with non-
stationary data, that is, data from different types of
scenarios). Oommen and Rueda (2006) proposed
a stochastic learning weak estimator (SLWE). The
SLWE combined with a linear classifier has been suc-
cessfully used to deal with problems that involve non-
stationary data and has been effectively used to clas-
sify television news into business and sports news
(Oommen and Rueda, 2006). In this work, each im-
age to be classified is read from the testing dataset,
and is used to feed the classification rule by means
of extracting statistical features into a feature vector.
The source alphabet contains n symbols (n = 256),
which represent the possible realizations of a multino-
mial random variable, and whose estimates are to be
updated by using the SLWE rules. While this rule re-
quires a ”learning” parameter (λ), it has been found
that a good value for multinomial scenarios should
be close to 1 (e.g., λ = 0.999 (Oommen and Rueda,
2005)) (see Algorithm 3).
The classification rule is validated using labeled
images and adjustments are made if necessary. Note
that in the actual classification process the label of
each image is not known. To classify the complete im-
age, several distance metrics are employed. Greater
details regarding these metrics are provided in the fol-
lowing section.
2.2.3 Distance Metrics
The choice of a distance function (also referred to
as “metric”) is not a trivial task. Often, different
components of the feature vectors may have different
weights in classification of an arbitrary image. Some
entries of the feature vector may be more important
than other entries, or some entries may have more
noise than other entries. Therefore, the choice of a
metric plays an important role in the performance of
the algorithm.
Euclidean Distance In this metric, it is assumed
that all entries in the feature vector have equal weight.
The Euclidean distance d(V,V
0
) between two feature
vectors V and V
0
is defined as
d(V,V
0
) =
v
u
u
t
255
∑
i=0
(V [i] −V
0
[i])
2
(1)
Weighted Euclidean Distance This metric is also
known as the Mahalanobis distance when the covari-
ance matrix is considered as a diagonal matrix. It
is assumed that different entries in the feature vec-
tor have different importance in the classification of
images. It is also assumed that an entry in the feature
vector is of less importance than another entry if its
variance is greater than the variance of another entry.
The weighting factor w is defined as w = 1/σ
2
, and
the weighted Euclidean distance is given as
d(V,V
0
) =
v
u
u
t
255
∑
i=0
(V [i] −V
0
[i])
2
σ
2
(2)
A discussion regarding some of the issues related to
the weighting factor w are presented in (Shupo et al.,
2006).
3 EXPERIMENTAL RESULTS
In this section, the results of two experiments are pre-
sented. For both experiments two datasets of im-
ages obtained with the ParaCamera were used. The
first dataset contained 43 images that contained one
or more humans in the scene and therefore skin re-
gions (e.g., “skin images”). From these images, 24
were used in the learning phase and 19 were used
in the testing phase. The second dataset contained
47 images without any humans present in the scene
and therefore no skin regions within the images (e.g.,
“non-skin images”). From these images, 24 of them
were used in the learning phase and 23 were used in
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
14

the testing phase. The images in both datasets were
of type JPEG. JPEG images are compressed images
where each “byte segment” contains the information
needed to reconstruct the original image. For exam-
ple, a byte or group of bytes may represent the encod-
ing of some coefficient that results from the discrete
cosine transform, or other transformation. In some
cases, however, the encodings result in variable length
codes (i.e., of length not necessarily multiple of 8)
which are spread out in a number of bytes. Sample
images from both the skin and non-skin datasets are
provided in Figure 3. Both the ML and SLWE employ
the use of a distance measure and appropriate distance
thresholdin order to classify an image as either “skin”
or “non-skin”. In general, different distance metrics
and different threshold settings may lead to different
results leading to variations in the number of false
positives and false negatives. In order to draw a mean-
ingful comparison between the results of the ML and
SLWE algorithms using the Euclidean and weighted
Euclidean distance metrics, results are presented as
a comparison between the probability of false posi-
tives (e.g., the probability of incorrectly classifying
an image as ”skin” when in fact it does not contain
any skin) and the probability of false negatives (e.g.,
the probability of incorrectly classifying an image as
”non-skin” when in fact it does contain skin). In other
words, setting the algorithmic parameters such that
the algorithm results in a particular number of false
negatives implies the algorithm will also result in the
corresponding number of false positives. The result-
ing graphs illustrate the probability of false negatives
vs. the probability of false positives. A summary of
the results for the ML and SLWE algorithms using
the weighted Euclidean distance metric are illustrated
in Figure 4(a),(b). The resulting graphs illustrate the
probability of false negatives vs. the probability of
false positives.
Since there is a trade-off between the probability
of false positives and false negatives with each algo-
rithm, one algorithm may outperform the other (e.g.,
provide “better” results, where “better” is defined as
minimizing either the number of false positives, the
number of false negatives or having an equal number
of false positives and false negatives). When consid-
ering the weighted Euclidean distance, the ML algo-
rithm with a 0% false positive rate and a 12% false
negative rate, outperforms the SLWE when a mini-
mal false positive rate is desired. With respect to the
Euclidean distance, the SLWE with a false positive
rate of 17% and false negative of 12% provides su-
perior results over the ML algorithm when an equal
number of false positive and false negatives is desired.
A summary of the results for the ML and SLWE algo-
(a) “Skin” image.
(b) “Non-skin” image.
Figure 3: Sample images form the “skin” and “non-skin”
image datasets. (a)“Skin image” (e.g., the image contains
regions of human skin) and (b) “non-skin image” (the image
does not contain any regions of human skin).
rithms using a weighted Euclidean distance metric are
illustrated in Figure 5(a),(b). The resulting graphs il-
lustrate the probability of false negatives vs. the prob-
ability of false positives. Since there is a trade-off be-
tween the probability of false positives and false nega-
tives with each algorithm, one algorithm may outper-
form the other (provide “better” results where “bet-
ter” is with respect to minimizing the number of both
false positives and false negatives). With respect to
the Euclidean distance metric, the SLWE with a false
positive rate of 17% and false negative of 12% pro-
STATISCAL-BASED SKIN CLASSIFIER FOR OMNI-DIRECTIONAL IMAGES
15
Decision Strategy For ML Algorithm in Euclidean Distance
0
0.2
0.4
0.6
0.8
1
0 0.1 0.2 0.3 0.4
Probability (False Negative)
Probability (False Positive)
(a) ML with the Euclidean distance metric.
Decision Strategy For SLWE Algorithm in Euclidean Distance
0
0.2
0.4
0.6
0.8
1
0 0.1 0.2 0.3 0.4
Probability (False Negative)
Probability (False Positive)
(b) SLWE with the Euclidean distance metric.
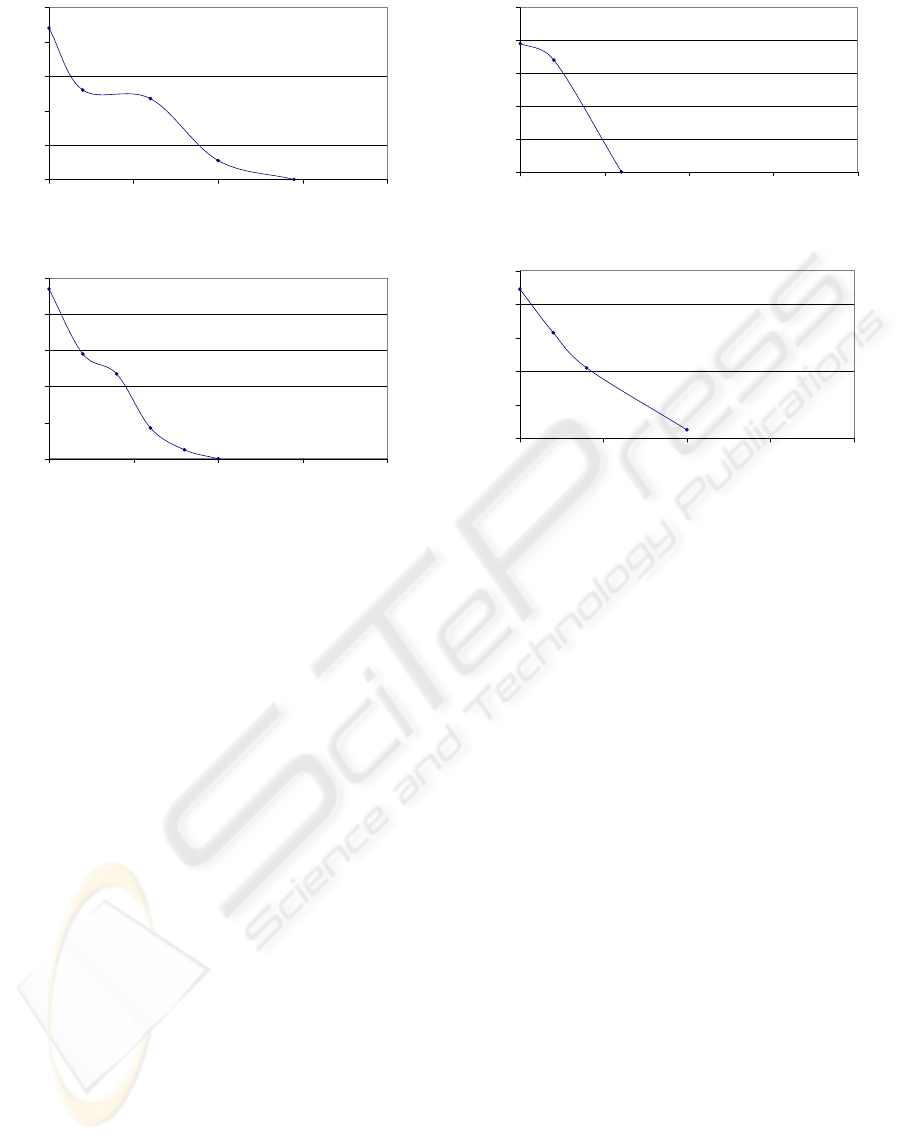
Figure 4: Decision strategies. Probability of false posi-
tives (e.g., the probability of incorrectly classifying an im-
age as “skin” when in fact it does not contain any skin) vs.
the probability of false negatives (e.g., probability of incor-
rectly classifying an image as “non-skin” when in fact it
does contain skin) for the ML and SLWE algorithms em-
ploying the Euclidean distance metric. (a) ML algorithm
and (b) SLWE algorithm.
vides superior results over the ML algorithm. When
considering the weighted Euclidean distance metric,
the ML algorithm with a weighted Euclidean distance
with a 0% false positive rate and a 12% false nega-
tive rate provides superior results over the SLWE al-
gorithm.
4 CONCLUSION
In this paper a description of a color-based human
skin detector was presented. The system is capable of
accurately and efficiently classifying images obtained
with an omni-directional video sensor as either con-
taining skin or not containing skin. The system is part
of a larger ongoing project whose goal is to develop an
autonomous surveillance system that can monitor an
area for human activity. The work described here pre-
sented one aspect of this system. In particular, the de-
velopment of a video sensor to obtain a fast overview
of the scene and identify potential areas of human ac-
tivity. Various other techniques can then be focused to
these potential areas of interest in order to obtain fur-
Decision Strategy For ML Algorithm in Weighted Euclidean
Distance
0
0.2
0.4
0.6
0.8
1
0 0.1 0.2 0.3 0.4
Probability (False Negative)
Probability (False Positive)
(a) ML with the weighted Euclidean distance metric.
Decision Strategy For SLWE Algorithm in Weighted Euclidean
Distance
0
0.2
0.4
0.6
0.8
1
0.00 0.10 0.20 0.30 0.40
Probability (False Negative)
Probability (False Positive)
(b) SLWE with the weighted Euclidean distance metric.
Figure 5: Decision strategies. Probability of false posi-
tives (e.g., the probability of incorrectly classifying an im-
age as “skin” when in fact it does not contain any skin) vs.
the probability of false negatives (e.g., probability of incor-
rectly classifying an image as “non-skin” when in fact it
does contain skin) for the ML and SLWE algorithms em-
ploying the weighted Euclidean distance metric. (a) ML
algorithm and (b) SLWE algorithm.
ther details. Two algorithms were presented: the max-
imum likelihood estimator and the stochastic learning
weak estimator and for each algorithm, two distance
metrics (Euclidean and weighted Euclidean) were ex-
perimented with.
During a training phase, ParaCamera images are
classified as either skin (contain regions of skin) or
non-skin (do not contain any regions of skin). The
features that are extracted from the training phase
with any needed adjustments are input into the clas-
sifier that was later used in the validation phase to
classify incoming images as skin or non-skin. Re-
sults were presented that compared both algorithms
and both distance metrics based on the number of
false positives and false negatives. The ML algorithm
provided superior results using the Euclidean distance
metric while the SLWE provided superior results us-
ing a weighted Euclidean distance metric. Results
also indicate that the system is capable of accurately
classifying ParaCamera images as either skin or non-
skin in a very efficient manner even when considering
the poor resolution inherent with ParaCamera images.
Future work will include greater, more extensive
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
16

experimentation using much larger training datasets
and a larger number of test images obtained that have
been obtained under a variety of scenarios and light-
ing conditions. Future work will also examine the
processing of skin classified images in order to ob-
tain greater details regarding the photographed scene.
Processing can include locating and grouping skin re-
gions within the image and inferring their position in
the real world. This information is of importance to
any surveillance application.
ACKNOWLEDGEMENTS
Asaf Shupo and Miguel Vargas Martin gratefully ac-
knowledge the financial support of the Natural Sci-
ences and Engineering Research Council of Canada
(NSERC).
REFERENCES
Baker, S. and Nayar, S. (1999). A theory of single viewpoint
catadioptric image formation. International Journal
of Computer Vision, 35(2):1–22.
Basu, A. and Southwell, D. (1995). Omni-directional sen-
sors for pipe inspection. In IEEE Transactions on Sys-
tems Man and Cybernetics, volume 25, pages 3107–
3112.
Boult, T., Michaels, R., Gao, P., Lewis, C.,
Yin, W., and Erkan, A. (1998). Frame
rate omni-directional surveillance and track-
ing of camouflaged and occluded targets.
http://www.eecs.lehigh.edu/ tboult/TRACK/LOTS.html.
Bradski, G. (1998). Computer vision face tracking for use
in a perceptual user interface. Technical report, Intel
Corp., Santa Clara, CA USA.
Chai, D. and Ngan, K. (1999). Face segmentation us-
ing skin-color map in videophone applications. IEEE
Transactions on Circuits Systems and Video Technol-
ogy, 9(4):551–564.
Chopra, M., Vargas Martin, M., Rueda, L., and Hung, P.
(2006). A source address reputation system to com-
bating child pornography at the network level. In
Proceedings of the IADIS International Conference on
Applied Computing, San Sebastian, Spain.
Duda, R. O., Hart, P. E., and Stork, D. E. (2000). Pat-
tern Classification. Wiley Interscience, Hoboken, NJ.
USA, second edition.
Gutchess, D., Jain, A., and Cheng, S. (2000). Automatic
surveillance using omni-directional and active cam-
eras. In Proceedings of the 2000 Asian Conference
on Computer Vision.
Hans, S., Anderson, H., and Granum, E. (1999). Skin color
detection under changing lighting conditions. In Pro-
ceedings of the 7th Symposium on Intelligent Robotics
Systems,, pages 187–195, Columbia, Portugal.
Herpers, R., Derpanis, K., Topalovic, D., and Tsotsos, J.
(1999). Detection and tracking of faces in real envi-
ronments. In Proceedings of the International Work-
shop on Recognition, Analysis and Tracking of Faces
in Real-Time Systems, pages 96–104, Korfu, Greece.
Jones, M. and Rehg, J. (1998). Statistical color models
with applications to skin detection. Technical Report
CRL 98/11, Compaq Computer Corp., Cambridge,
MA USA.
Kapralos, B., Jenkin, M., and Milios, E. (2003). Audio-
visual localization of multiple speakers in a video tele-
conferencing setting. Journal of Imaging Science and
Technology, 13(1):95–105.
Nayar, S. (1997). Omnidirectional video camera. In Pro-
ceedings of the DARPA Image Understanding Work-
shop, pages 235–241, New Orleans, LA.
Oommen, B. J. and Rueda, L. (2005). On utilizing stochas-
tic learning weak estimators for training and classi-
fication of patterns with non-stationary distributions.
In Proc. 28th German Conf. on AI, pages 107–120,
Koblenz, Germany.
Oommen, B. J. and Rueda, L. (2006). On utilizing stochas-
tic learning weak estimators for training and classi-
fication of patterns with non-stationary distributions.
Journal of Pattern Recognition, 39:328–341.
Peri, V. and Nayar, S. (1997). Generation of perspective and
panoramic video from omnidirectional video. In Pro-
ceedings of the DARPA Image Understanding Work-
shop, pages 243–245, New Orleans, LA USA.
Raja, Y., McKenna, J., and Gong, S. (1998). Segmenta-
tion and tracking using color mixture models. In Pro-
ceedings of the Third Asian Conference of Computer
Vision.
Shupo, A., Vargas Martin, M., Rueda, L., Bulkan, A., Chen,
Y., and Hung, P. (2006). Toward efficient detec-
tion of child pornography in the network infrastruc-
ture. IADIS International Journal on Computer Sci-
ence and Information Systems, 1(2):15–31.
Stiefelhagen, R., Yang, J., and Waibel, A. (1999). Mod-
eling focus of attention for meeting indexing. In Pro-
ceedings of the ACM Multemedia ’99, pages 3–10, Or-
lando, FL USA.
Swain, M. and Ballard, D. (1991). Color indexing. Interna-
tional Journal of Computer Vision, 7:11–32.
Yang, J. and Waibel, A. (1996). A real time face tracker.
In Proceedings of the 3rd IEEE Workshop on Applica-
tions of Computer Vision, Sarasota, FL, USA.
Yasushi, Y. (1999). Omni-directional sensing and its appli-
cations. IEEE Transactions on Information and Sys-
tems, E82-3.
Yong, R., Gupta, A., and Cadiz, J. (2001). Viewing meet-
ings captured by an omni-directional camera. In ACM
Transactions on Computer-Human Interaction.
Zheng, J. and Tsuji, S. (1992). Panoramic representation
for route recognition by a mobile robot. International
Journal of Computer Vision, 9(1):55–76.
STATISCAL-BASED SKIN CLASSIFIER FOR OMNI-DIRECTIONAL IMAGES
17
