
Case-Based Indoor Navigation
Alessandro Micarelli and Giuseppe Sansonetti
Department of Computer Science and Automation
Artificial Intelligence Laboratory
Roma Tre University
Via della Vasca Navale, 79, 00146 Rome, Italy
Abstract. The purpose of this paper isto present a novel approach to the problem
of autonomous robot navigation in a partially structured environment. The pro-
posed solution is based on the ability of recognizing digital images that have been
artificially obtained by applying a sensor fusion algorithm to ultrasonic sensor
readings. Such images are classified in different categories using the well known
Case-Based Reasoning (CBR) technique, as defined in the Artificial Intelligence
domain. The architecture takes advantage of fuzzy theory for the construction of
digital images, and wavelet functions for their analysis.
1 Introduction
In recent years, the problem of indoor robot navigation has been largely considered for
the challenges that issues in several technological fields. From the motion control sub-
strate to the artificial reasoning layer, many researchers have worked out solutions able
to perform complex navigation tasks in many application fields ranging from industry to
service robotics. In particular, a still open problem is the devising of efficient strategies
able to cope with the problem of self localization in unstructured environments, i.e., the
ability of estimating the position of the mobile platform when no artificial landmarks
can be used to precisely indicate to the robot its position. Now, suppose to restrict the
problem and choose the environment in a particular class, still very wide: an office-like
environment with corridors, corners and other similar features. Suppose also that only
low cost sonar sensors can be used: all localization information, that at this point have
a topological character, should be easily extracted from sensory data and used to guide
the platform along the path. Unfortunately, in a dynamic environment, those features
(natural landmarks) can vary and some unknown configurations could be found leav-
ing to the robot the choice on several strategies: one could consist in finding the nearest
matching topological element in a static library; an other one could include a supervised
learning stage in which the new pattern is used to increase the base library itself. This
second approach is often referred as Case-Based Reasoning (CBR) [1, 5], and tries to
catch all the learning opportunities offered both by the environment and, in an initial
phase, by an external supervisor, to improve robot skill in analyzing its exteroceptive
sensorial view.
Micarelli A. and Sansonetti G. (2007).
Case-Based Indoor Navigation.
In Robot Vision, pages 97-106
DOI: 10.5220/0002069300970106
Copyright
c
SciTePress
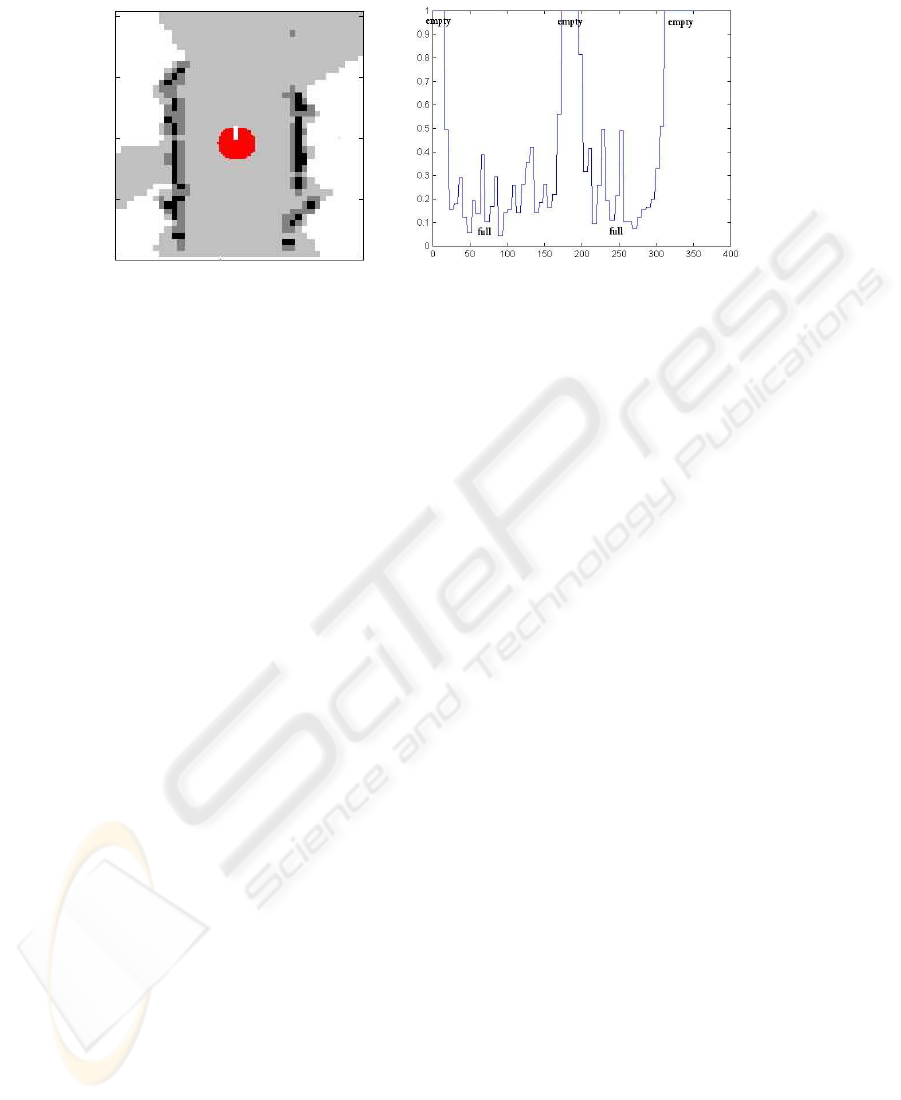
Fig.1. Map of a corridor.
Fig.2. Worldmark.
2 A Case-Based Approach
Autonomous navigation usually implies a recognition phase for each step taken by the
robot to estimate its position, or better, to understand the particular shape of the envi-
ronment (the topological feature) inside its actual range of view. In our case, this can
be done comparing the actual sonar output with a set of reference signals associated
with particular topological features. In most cases, association is done by comparing
the actual view with a static list of models obtained with a priori considerations on
the environment itself [4]. However, following a CBR philosophy, a learning approach
can be devised in which real-world cases obtained from a supervised navigation are
used to build and update a dynamic library. In this paper, we want to show how such
a method can be successfully applied to help the robot during navigation in dynamic
environments containing features that only partially correspond to previously known
cases. In particular, the problem we intend to address concerns the recognition of a
sonar-based digital image and its classification under one category belonging to a set of
predetermined topological situations (Corridor, Corner, Crossing, End Corridor, Open
Space).
Basically, the surrounding of the robot is represented in terms of Fuzzy Local Maps
(FLM), i.e., Fuzzy Maps [7, 8], that turned out to be extremely useful in many sensor
fusion problems, obtained from a preprocessing stage applied to the sonar signals. Each
FLM consists of 40 x 40 cells and, for each cell of an FLM, two values specifying
the degree of membership to the set of empty cells and to the set of occupied cells are
computed. An FLM, usually derived at each step merging the last n sets of collected
data, is thereafter represented by two fuzzy sets: the empty cells set E, and the occupied
cells set O. As an example, in Fig. 1 the E set of a FLM obtained in a corridor is
reported. Different gray levels in the image represent different fuzzy values. Pixels with
darker gray levels correspond to lower values of membership to the empty cells set E,
white pixels are unexplored regions, with a fuzzy value of membership to E equal to 0.
Now, with reference to the scheme depicted in Fig. 3, let us assume that the robot
has acquired a new FLM. As first step, a feature-based representation of the new FLM
98
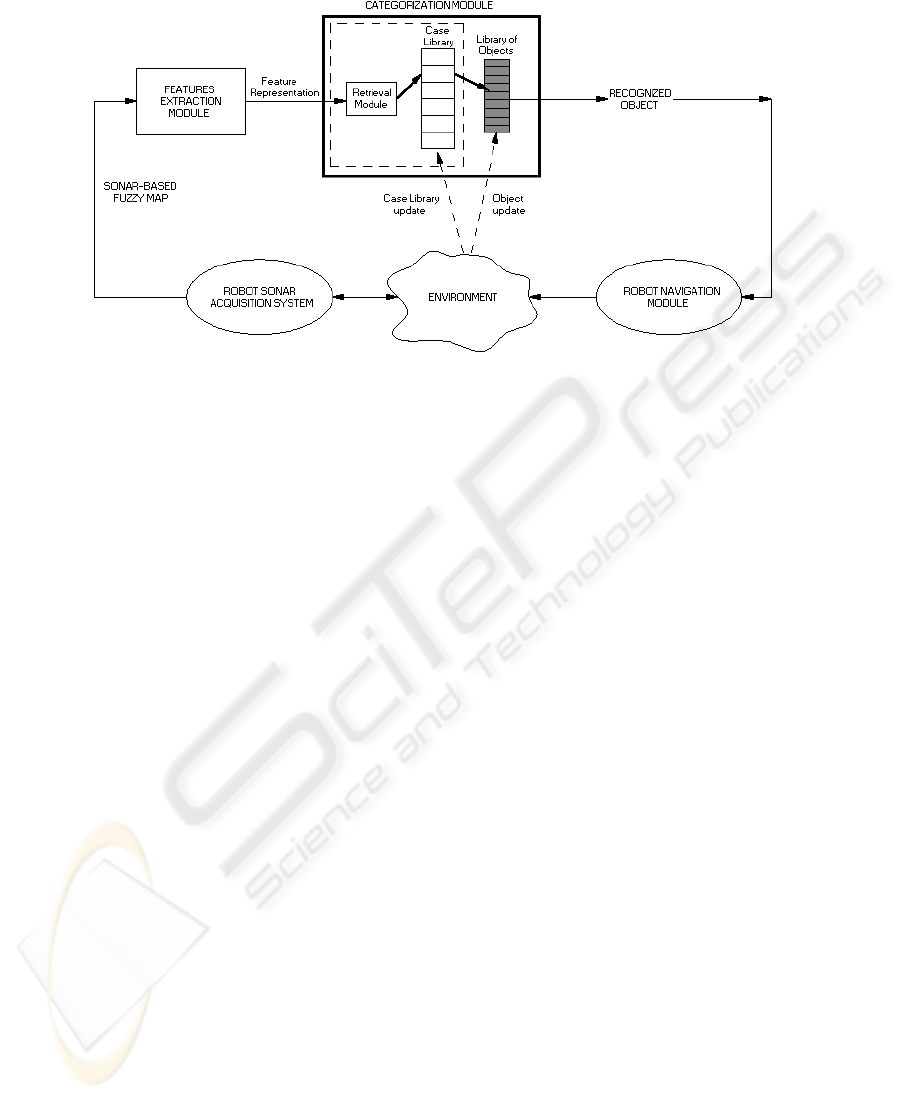
Fig.3. Navigation architecture with Case-Based Reasoning.
is evaluated by the feature extraction module. This representation constitutes the “new
case” of the proposed CBR system. The retrieval module shown in the figure will effect
a search in the case library containing the old cases, based on a <problem representa-
tion, solution> structure, which in this specific case will be <FLM based representa-
tion, topological category index>. The solution given in the old case can therefore be
seen as a pointer to the “Library of Objects”, containing the categories (i.e., “topolog-
ical features”) that could appear in the maps to be analyzed. The “recognized object”
is at this point taken into consideration by the robot navigation system to plan its mo-
tion. This object, which constitutes the old solution of the case retrieved from the Case
Library, will also be considered as a candidate solution of a new problem (basically,
there is no need for an adaptation of the old solution to suit the new case) and if the hu-
man supervisor accepts it, the pair <new FLM based feature representation, recognized
object index> can be inserted as a new case in the Case Library.
3 Image Recognition
For sake of clarity, the pseudo-code of a rather simplified version of the classification
algorithm is reported in Table 1. The complete solution, employed for the experimental
performance assessment, was implemented in C language under the Linux operative
system, for reasons of porting and efficiency. To handle both the new case and any of
those cases dwelling in the Case Library, the use of a record structure comprising the
three fields below was adopted:
99

– a one-dimensional fuzzy worldmark summarizing the content of the FLM;
– object, designed to store the label associated to the recognized object;
– time, reserved to the storage of information regarding the utility of the case of
reference.
As indicated above, the first field is dedicated to the representation of the FLM. Specifi-
cally, in order to guarantee the applicability of the current approach to real-time control,
a simplification has been introduced: the bi-dimensional fuzzy map of Fig. 1 is replaced
with a one-dimensional fuzzy signal, named worldmark. The worldmark is computed
by determining, for each direction around the robot, the value of the cell with the high-
est matching score to the set of empty cells, or, in other words, the cell for which the
risk of belonging to a possible obstacle is minimum (see Fig. 2). Therefore the “new
case” that appears in Fig. 2 consists of a vector of N elements (typically N=360) with
values in the interval [0,1].
Before launching into the detailed description of the representation modalities of
the aforementioned three fields, we believe it useful to provide a general overview of
the entire algorithm. The domain expert’s possibility to intervene in the decision task is
possible both in the initial training phase of the system as well as during the verification
phase for the retrieved solutions. Another aspect worthy of attention is the one related to
the adoption of a double similarity test. It is manifest that as the pertinence of the case
library increases, so does the probability of retrieving a candidate with a good value
of similarity to the case under examination and, therefore, that the associated solution
to will prove to be valid even in a contingent situation. On the other hand, a rather
voluminous library presents the two following inconveniences:
– more time necessary for the retrieval of the required information;
– a depletion in terms of available space.
In order to avoid, at least partially, this state of affairs, the proposed architecture uses
two different tests, respectively, named reliability test and identity test. The former pro-
vides indications on the possibility of successfully apply the solution of the retrieved
case to the new situation, the latter controls the insertion of the new case into the sys-
tem memory. The reason for the introduction of the identity test parameter is owed to
circumstances where it is useless to include a new case, “quite” similar to a case stored
in the library in the system memory. The reliability test is performed by comparing the
current similarity metric value s
j
with the reliability threshold S
a
, while the identity
test is performed by comparing the same value s
j
with an identity threshold S
b
. In
Tables 2 and 3 the threshold values determined by a heuristic procedure are reported
together with the percentage of coincidence between the responses given by the system
and those furnished by a domain expert. Specifically, for the setup of S
a
and S
b
, the
available memory space, the amount of resources necessary to keep in memory the pair
<representation of signal, represented object> and the statistics of the similarity index
were considered.
Keeping in mind an “intelligent” management of the resources available to the sys-
tem, a third test has been introduced. The idea that has, concretely, lead to its introduc-
tion, stems from the need to keep track, for all cases stored in memory, of the frequency
of their appearance and the effectiveness of the solution associated to them. The record
100
Table 1. Pseudo-code for CBR.
Function REC(NewImage) returns RecObject
inputs : NewImage; the input image
variables : CaseLib; the case library
C
j
; the generic old case
T
nouse
; the inactivity time
S
a
; the reliability threshold
S
b
; the identity threshold
local variables : D.image; the image representation
D.object; the recognized object
s
j
; the metric value
tempvalue; the temporary metric value
tempind; the temporary case index
D.image ← WAVELET(NewImage)
D.object ← 0
tempvalue ← 0
tempind ← 0
for each old case C
j
in CaseLib do
begin
s
j
← COMPARE CASE(D.image, C
j
.image )
if (tempvalue < s
j
) then
begin
tempvalue ← s
j
tempind ← j
end
end
if (tempvalue < S
a
) then
begin
D.object ← HumanExpertSolution
C
n+1
.image ← D.image
C
n+1
.object ← D.object
C
n+1
.time ← 0
end
else
begin
if (C
tempind
.object = HumanExpertSolution) then
begin
D.object ← C
tempind
.object
C
tempind
.time ← 0
end
else
D.object ← HumanExpertSolution
if (tempvalue < S
b
) then
begin
C
n+1
.image ← D.image
C
n+1
.object ← D.object
C
n+1
.time ← 0
end
end
CLEAN LIB(CaseLib,T
nouse
)
RecObject ← D.object
returns RecObject
101

field time was specifically introduced in consideration of these aims. Once more, the
clean library test compares this value with a threshold T
nouse
. If time exceeds T
nouse
the case is removed from the dictionary. For the determination of the optimal value to
assign to the indicator T
nouse
, the same considerations expressed above for the param-
eters S
a
and S
b
still apply.
However, for a full understanding of the architecture proposed in this article there
are still two major aspects that, as always, in any system based on cases, constitute the
heart around which all the rest revolves, that is,
– the signal representation;
– the similarity metric.
These aspects are, furthermore, strongly interrelated.
3.1 The Signal Representation
Choosing the most efficient representation for a current problem constitutes the crucial
moment of any application of signal processing. Here, we resorted to a wavelet repre-
sentation of the worldmark. The wavelet representation expresses the signal of interest
as superimposed elementary waves and, therefore, in this respect does not introduce any
innovationcompared to traditional methods, such as Fourier series expansion. However,
the innovative aspect offered by wavelet functions consists in the possibility of subdi-
viding the available data in components with differing bandwidths and time durations.
Each of these components is subsequently analyzed by a resolution associated to its
scale. The advantages offered by this procedure are tangible, above all, in respect to
the analysis of physical situations where typical signals show discontinuity and sudden
peaks, exactly as happens with worldmarks. The advantages of adopting representa-
tions in similar situations through wavelet functions, instead of traditional methods, are
extensively expounded in the literature [3, 6,2].
3.2 The Similarity Metric
The last aspect to be examined concerns the choice of the metric necessary for the
evaluation of the similarity existing between case f in input and the generic case g be-
longing to the Case Library. Regardless of the application context, a good metric must
anyhow be able to guarantee an efficient compromise between the two main requisites,
which are the quality of the recognition and the computational complexity. Accordingly,
during the experimental activity several different metrics were tested. Among them, the
relatively best results were obtained by using the cross-correlation factor as metric,
whose expression is:
M ax
θ∈[0,2π ]
hf(x), g(x − θ)i
p
hf(x), f(x)i hg(x), g(x)i
This quantity was calculated both in the time and frequency domains, respectively, ob-
taining in both cases significant results with moderate processing time, through compu-
tation resources available on the market today.
102

4 Experimental Results
For our tests, we used the simulator of Nomad200 by Nomadic Technologies, a mo-
bile robot equipped with a ring of 16 equally spaced ultrasonic sensors. The procedure
consists of tracing a number of global maps of hypothetical office-like environments,
simulating the robot dynamics and, finally, collecting the output data. For these op-
erations we used the real time navigation software A.N.ARCH.I.C. [9] which, together
with the aforementioned simulator, made the robot virtual navigation inside the mapped
environment possible producing the sequence of FLMs and corresponding worldmark,
each pair related to a different position taken during the followed path. Each sequence,
therefore, includes hundreds of FLMs and worldmarks, which constitute the input for
the tests that we performed on our classifier. The values reported below were obtained
by using a machine equipped with a Pentium M processor, 1700 MHz, and 512 MB
RAM. During the testing phase, we initialized the system through representations re-
lated to four different configurations:
– corridor
– crossing
– end of corridor
– angle
providing, for each of these, three different standard schemes, in practice as it appears
in the initial phase, at its basic level, and in the final phase.
Tables 2 and 3 show, in particular, the results recorded during two different series of
tests of the system. The first illustrates the results obtained by performing the similarity
evaluation between the input signal and the generic one inside the case library directly
in the temporal domain. Instead, for the second one, the same operation was effected in
the wavelet domain, i.e., the matching evaluation of the two signals was not made by es-
timating the cross-correlation between sequences of temporal samples, but between the
corresponding residual low-frequency components, obtained through Discrete Wavelet
Transform (DWT). Consequently, it is possible to appreciate in a more tangible way
the extent of the possible advantages granted by the expansion of signals in series of
waveform, perfectly located in time and in frequency.
To perform this experimentation, we simulated the robot navigation in an environ-
ment that Fig. 4 illustrates as a global map. In the same figure we have also traced the
path followed by the robot, planned on the basis of specific methods for which further
explanation is out of the scope of this paper. A sequence of 636 FLMs is thus gen-
erated, as well as a corresponding number of worldmarks. In order to streamline the
experimental procedure, without, however, penalizing its efficiency, since the variation
between one FLM and the subsequent one was practically insignificant, we decided to
consider only one over three samples and to discard the others. As a result, the map
effectively input to the system consists of only 212 FLMs.
Initially, we shall examine the values reported in Table 2. As anticipated earlier,
the tests were performed by running the system beforehand through the same training
session, for each test series. This fact becomes apparent by looking at the data in the
6
th
column, since the same value recurs systematically in each line (12 cases). Actually,
the coincidence does not only concern the number of cases used, but also the samples
103

Fig.4. Global map.
themselves. In this way, we attempted to guarantee the same initial condition in each
test series.
A reading of the data discloses the consistency of the recorded fluctuations, in re-
spect to the varying values assigned to the two similarity thresholds. For example, it
is noticeable that when the reliability threshold S
a
decreases, there is a proportional
decrease in the number of interventions required of the domain expert by the system.
Similarly, there is a clear increase in the number of cases inserted in the relative library
matching an increase in the identity threshold S
b
. However, the phenomenon of major
importance and interest relates to the trend recorded by the factor indicated in the ta-
ble as coincidence percentage. This factor was gathered by a comparison between the
system responses and those that would have been given by the same expert who per-
formed the training, when examining the corresponding FLM. Clearly, such a strategy
is inevitably damaged by the loss of information that occurs during the passage from a
bi-dimensional fuzzy map (FLM) to the corresponding polar map (worldmark). How-
ever, notwithstanding this additional source of uncertainty, the results obtained may be
considered more than satisfactory.
Proceeding with the analysis of the data reported in Table 3, which refer to the
same experimental tests, but performed on the wavelet coefficients and not on their
corresponding original signals, the gain is noteworthy, both in terms of coincidence
percentage as well as computational complexity. In particular, it can be observed how
the first factor is affected to a significant lesser degree by the variation of the values
assigned to the two thresholds S
a
and S
b
.
Although we do not wish to dwell upon too many details of the experimentation, it
should be noted, however, that to obtain the wavelet coefficients relating to sequences
of 360 temporal samples we used a simple DWT with four levels and analysis filters of
the type belonging to the Daubechies family (specifically, the version with four coeffi-
cients).
Another observation should be made on the processing time. In order to finalize this
experimentation, for sake of clarity, we decided to operate on the group of worldmarks
104

Table 2. First experimental set.
S
a
S
b
Input Expert Coincidence Cases Cases Processing
cases interventions percentage before after Time (s)
0.90 0.93 212 14 84.0% (178) 12 51 10.31
0.88 0.93 212 12 84.0% (178) 12 51 10.16
0.85 0.93 212 5 81.6% (173) 12 51 9.46
0.91 0.93 212 23 94.3% (200) 12 51 10.46
0.91 0.95 212 19 94.3% (200) 12 74 13.86
0.89 0.91 212 14 88.7% (188) 12 37 8.21
Table 3. Second experimental set.
S
a
S
b
Input Expert Coincidence Cases Cases Processing
cases interventions percentage before after Time (s)
0.90 0.93 212 12 94.3% (200) 12 43 0.47
0.88 0.93 212 7 93.9% (199) 12 43 0.53
0.85 0.93 212 5 92.4% (196) 12 43 0.43
0.91 0.93 212 15 94.3% (200) 12 43 0.48
0.91 0.95 212 13 94.3% (200) 12 64 0.59
0.89 0.91 212 12 94.8% (201) 12 51 0.38
generated during the course of the overall navigation inside the simulated environment.
Consequently, the time necessary to operate in real-time is decidedly less than that
reported as the sum over all input cases in the table and, above all, significantly lower
than the time allowed during the robot actual navigation.
5 Conclusions
Generally, the normal pattern recognition techniques require models of the objects that
must be recognized and classified. The collection of models available to the classifier
clearly reflects the original knowledge of the situation to be analyzed. However,in most
cases, as for the robot autonomous navigation, there exists practically no prior infor-
mation whatsoever. Our proposed architecture includes a feature extraction algorithm
incorporated into a CBR shell, which allows a constant increase in the knowledge of
the surrounding environment. We remark, however, that the possibility of updating the
Object Library as well as the Case Library, although left open and in principle with no
limit to the number and complexity of information that may be collected, is constrained
to real-time restrictions linked to the technology that is available on the market today.
Future developments will be focused on introducing the possibility of fusing more
information coming from different kind of sensors (e.g., laser scanners or cameras) into
a more detailed worldmark to provide the classifier with a better and more robust input
data.
105

References
1. Aamodt, A., and Plaza, E. Case-Based Reasoning: Foundational Issues, Methodological
Variations, and System Approaches. AI Communications, 7(1), pp. 39–59, 1994.
2. Chui, C.K. An Introduction to Wavelets. Academic Press, London, England, 1992.
3. Daubechies, I. Orthonormal bases of compactly supported wavelets. Comm. Pure Appl.
Math., 41(7), pp. 909–996, 1988.
4. Fabrizi, E., Panzieri, S., and Ulivi, G. Extracting topological features of indoor environment
from sonar-based fuzzy maps. Proceedings of the 6th International Conference on Intelligent
Autonomous Systems, Venice, Italy, 2000.
5. Kolodner, J. Case-Based Reasoning. Morgan Kaufmann, San Mateo, CA, 1993.
6. Mallat, S.G. A Theory for Multiresolution Signal Decomposition: the Wavelet Representa-
tion. IEEE Transactions on Pattern Analysis and Machine Intelligence, 11(7), pp. 674–693,
1989.
7. Oriolo, G., Vendittelli, M., and Ulivi, G. Real-Time Map Building and navigation for Au-
tonomous Robots in Unknown Environments. IEEE Transactions on Systems, Men and Cy-
bernetics - Part B: Cybernetics, 28(3), pp. 316–333, 1998.
8. Panzieri, S., Petroselli, D., and Ulivi, G. Topological localization on indoor sonar-based
fuzzy maps. Intelligent Autonomous System, IOS Press, Amsterdam, Netherlands, pp. 596–
603, 2000.
9. Panzieri, S., Pascucci, F., and Petroselli, D. Auton. Navigation ARCHitecture for Intelligent
Control, www.dia.uniroma3.it/autom/labrob/anarchic, 2002.
106
