SPATIAL RANK AND APPROXIMATE SYMMETRIES IN
SEQUENTIAL RECONSTRUCTION OF DENSE PACKINGS
Alexander Vinogradov
Dorodnitsyn Computing Center of Russian Academy of Sciences, Moscow, Russia
Keywords: Hough transform, spatial shape, Parzen window, symmetry group, sequential trials, ergodicity, k-point
configuration, group manifold, spatial isomer.
Abstract: General rotation group manifold is used as a base structure for representation of k-point configuration
clusters in Hough-type parametric space. This yields to introduce efficiently spatial ranks inside k-point trial
set and arrange in multiple dimensions Parzen-like windows with properties analogous to the linear ones’.
As a result, asymptotically optimal dense packings of clusters are automatically produced for arbitrary
spatial shapes via independent sequential trials.
1 INTRODUCTION
Hough transform is widely used as a powerful
technique in various IP applications. (Hough P.V.C.,
1962). Recently it appears in many forms,
generalized versions, and specialized hard and soft
implements (Chen L.1 et al, 2004, Daries C.J. and
Nixon M.S., 1998, Monari J. et al, 2006). Essential
reduction of dimensionality as main advantage is
achieved on this way when more or less complicated
spatial shapes are transformed to point-wise clusters
in appropriate parametric space (Leavers V.F., 1992,
Torii A. et al, 2005, Zhang S.-C., Liu Z.-Q., 2005).
Single point is really good representation in
many respects, but it implies a sort of indifference to
all movements inside the shape and usually ignores
initial feature distribution on it, in particular. In this
paper we develop an approach to preserve this
information and propose a method for its efficient
usage in the case when the set of all inside-shape
movements forms a group structure. We describe an
application of the approach to one of the typical
clustering tasks.
2 GROUP STRUCTURES OF
HOUGH TRANSFORM
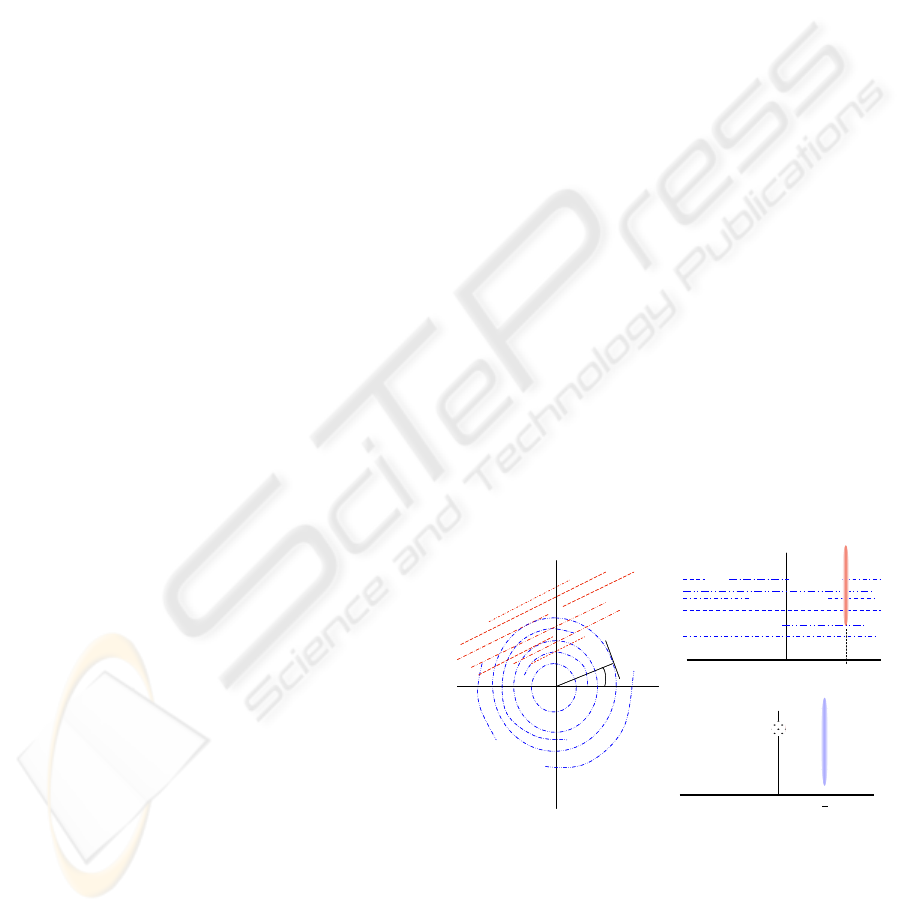
In its simplest authentic form the Hough transform
already uses some group properties of spatial data
(Figure 1). Really, population of any Hough cluster
representing a line L is indifferent with respect to
operations of one-parametric translation group of
this line T
1
(L). Similarly, clusters of double Hough
transform, representing concentric rings, are
indifferent with respect to operations of one-
parametric central rotation group SO
2
. In the case of
generalized 4-parametric Hough transform an
indifference of this type takes place on spheres with
respect to SO
3
-movements produced by three
independent generators, and so on.
x
π
−
π
d
Image
Hough(Image)
d
'
ϕ
ϕ
'
ϕ
SO
2
Hough(Hough(Image))
π
−
π
D
Ф
SO
2
2
π
x
π
−
π
d
Image
Hough(Image)
d
'
ϕ
ϕ
'
ϕ
SO
2
Hough(Hough(Image))
π
−
π
D
Ф
SO
2
2
π
Figure 1: Authentic Hough and double Hough transforms.
An important object appears after first step of
double Hough transform in the second example, i.e.,
a line clusters resulting from rings of initial Image
plane. Any line cluster of this type preserves empiric
density distribution of detected line details of the
ring, but the distribution is represented now on the
211
Vinogradov A. (2007).
SPATIAL RANK AND APPROXIMATE SYMMETRIES IN SEQUENTIAL RECONSTRUCTION OF DENSE PACKINGS.
In Proceedings of the Second International Conference on Computer Vision Theory and Applications, pages 211-214
DOI: 10.5220/0002071102110214
Copyright
c
SciTePress

angle
ϕ
scale. Moreover, since zero rotation angle is
defined and thus fixes the unit of Lie group SO
2
, this
scale turns out as corresponding one-dimensional
group manifold itself. The subject matter of the
paper is an implementation of the idea that initial
density distribution of characteristic features
revealed on symmetric spatial shape could be
preserved on group manifold in a form of
frequencies, with which elements of the group are
used in the transform. Below, we describe details of
the formal construction along with investigation of
some special task of spatial clustering, where
representation of such type is essentially needful.
3 DENSE PACKINGS
We consider a class of dense packings with
coefficient 1, in which the shapes of elements may
change while all the elements have the same volume.
Examples in dimensions 2 and 3 are given by the
decomposition of asymmetric region into compact
domains of equal volume and the arrangement of
elastic reservoirs with identical filling in a bounded
volume of a space. For different ways of defining
admissible shapes of elements (constraints on the
linear dimensions and surface area, elasticity,
internal potentials; etc.), the analysis of the variants
of dense packings turns out to be related to the
solution of complex optimization problems. The
goal is to find ways to reduce the computational
complexity of problems of this type by using the
extremal properties of the process of sequential
random choice in which a sample
N
RX ⊂
is tested
by small sub-samples. Below, we describe the
application of a special sequential trial scheme in
which the problems of enumeration of close-to-
optimal variants of the arrangement of clusters,
finding approximate symmetries, as own discrete
symmetries of packings as hidden internal
symmetries of the domain X, and sequential filtering
of optimal solutions and exact symmetries among
them are considered from a unified point of view.
Suppose that X
⊂ R
N
is a bounded domain, the
space (X,σ,μ) is an a priori distribution in X, and F is
a functional that defines the type of a K-cluster
packing O={O(x
k
), k=1,…,K} in X,
F(O) → max (1)
For nondegenerate distributions (X,σ,μ) with
density p
μ
, a pair (X,F) defines a certain set of
variants of optimal packing, i.e., a certain set of
solutions to problem (1) of the form
O* = argmax F(O) = {O* (x*
k
)}, (2)
∪
O(x
i
)=X.
If it is uniquely specified how the centers are
ranked, then each set (2) defines a point in the space
R
NK
that describes the arrangement of the centers of
optimal clusters in R
N
∗
χ
=(x*
1,…,
x*
K
)
∈
R
NK
. (3)
We will refer to the sets χ
∈R
NK
as configurations
and the sequential acts of choosing configurations as
trials.
We will seek a solution to the problem of
enumerating various kinds of packing in the class of
algorithms requiring constant resources for
computation in all trials. The example is the
computation of centers as cluster averages, where
the means can be permanently refined by the same
recurrence formula
M
M
x
+x =(M+1)
1+M
x
. (4)
Each portion of M
0
elements extracted from X
considered as the general population reflects the
form of the distribution (X,σ,μ). In one-dimensional
case M
0
+1 linear blocks known as “Parzen
windows” (Parzen E., 1962) are widely used in
nonparametric density estimations. Applying certain
specialization of F for finite sets, one can translate
this approximation into a K-point representation
χ
0
∈
Y
0
(M
0
)) whatever the volume of the portion M
0
.
If we follow the model chosen, then, in order to
combine particular solutions of the form χ
0
into the
summarized result, we should apply the same
procedure in all trials carried out in a fixed space of
memory, which includes an array for storing this
summarized result. Here, we apply the following
standard procedure:
(a) choose a sufficiently large number of
initial trials M
1
;
(b) construct an appropriate set Y
1
(M
0
) of
particular configurations of the form χ
0
∈Y
0
(M
0
);
(c) analyze Y
1
(M
0
) and single out from R
NK
a base set of clusters and the corresponding set
Y*
1
(M
0
) of their central elements χ*
∈
Y*
1
(M
0
) by
using certain functional F
1
in R
NK
;
(d) fill the base clusters with the results of
further trials so that the next configuration χ is
related to the nearest center of the base cluster as a
template by a certain measure of proximity or the
metric ρ(χ, χ’). To avoid pathological situations, we
assume that the proximity is consistent with the
usual Euclidean metric: ρ(χ, χ’)→0, as ||χ- χ’||→0 in
R
NK
;
(e) the solution being refined will
correspond to the filling levels of clusters as
neighborhoods of the central elements χ*.
There is extremely efficient implementation of
outlined scheme in one dimension that is based on
good asymptotic behavior of rank statistics.
Temporal means for ranks are normalized sums of
IID values and thus are consistent estimates for
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
212
bounding points of Parzen windows. This estimates
can be calculated by the formula (4); their a priory
distributions are rapidly normalized in sequential
trials; and corresponding variance decreases with the
rate D=1/O(M) as M→∞. So, the sample X
composes “by itself” the optimal packing via always
the same process and regardless to the forms of the
sample X and initial distribution (X,σ,μ).
In multiple dimensions the scheme looses many
of these attractive properties. The main reason is the
luck of immediate analogues of the ranks in view of
the absence of a certain linear ordering in the sample
space (Vinogradov A.P., 2001). If elements of the
problem posing are insensitive or invariant with
respect to the action of some symmetry group of the
sample, regardless exact or approximate, it’s
impossible to establish a doubtless correspondence
between ranks in different trials, and thus it’s a
problem to arrange the addition (4) correctly. In the
same time, if symmetry G is exact, i.e. probability
space (X,σ,μ) is G-invariant, any action of g
∈
G
results in a metric isomorphism between measurable
spaces (X,σ,μ) and g(X,σ,μ), and we can use fiducial
equivalents of ranks. So, we can postulate as basic
some G-invariant method of ranking configurations
in accordance with (1) and thus factorize the entire
sequential scheme by the action of G. In the case of
approximate symmetry the same is valid for some
equivariant conditional distribution on X.
4 GENERALIZED HOUGH
PARAMETERIZATION FOR
CENTRAL SYMMETRIES
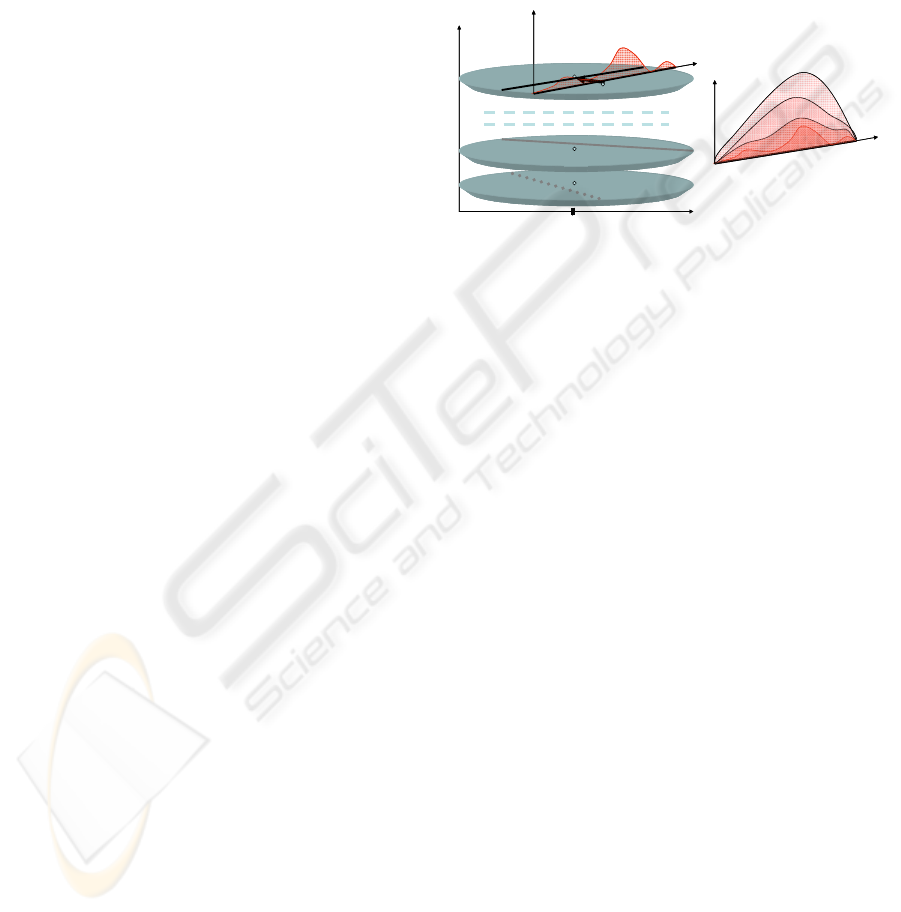
Here we take into consideration only the simplest
linear groups of central symmetry. To efficiently
look for exact and approximate symmetries we use a
special parametric space S of Hough type built of
|Y*
1
(M
0
)| copies of SO
N
manifold, where centers
j
∈
Y*
1
(M
0
) of configuration clusters (c) are used as
templates of ranking (Figure 2). This type of
parameterization is applicable in more general case
too, when N exceeds 3. If spatial isomers are treated
as separate templates in each case when N>2, then
the whole sequential scheme is automatically
factorized also with respect to the Weyl group of R
N
.
It was shown that for any particular symmetry
group G
1
⊂ SO
N
the orbit of each base configuration
fills a manifold of an adjacent G
1
-class (Vinogradov
A.P., Voracek J., Zhuravlev Yu.I., 2006). Absolutely
asymmetric solutions appear as salient domains in S.
If an essential approximate symmetry takes place,
the filling of the adjacent class must be continuous;
for exact symmetry it must be either uniform. For a
ranking template j
∈
Y*
1
(M
0
) and a number m
i
of its
realizations in trials performed the population of the
G
1
-orbit represents instant sample distribution that
approximates associated fiducial distribution on the
scale of parameter g
∈
G
1
. In particular, Figure 2
represents the scale space for G
1
-orbit sample being
refined in trials, where number of realizations m
i
(of
symmetry G
1
for ranking template j) serves as semi-
group parameter
U(Σm
i
,p(m
1
,K
1
))=U(m
max
,…,U(m
2
,p(m
1
,K
1
)…). (5)
g G
1
∈
SO
N
SO
N
SO
N
0
K
1
K
2
K
3
G
1
∈
p(m,K
1
)
g G
1
K
1
j
m
1
m
2
m
max
g G
1
∈
SO
N
SO
N
SO
N
0
K
1
K
2
K
3
G
1
∈
p(m,K
1
)
g G
1
K
1
j
m
1
m
2
m
max
Figure 2: Hough-type parameterization, left. A scale space
for samples refined on the G
1
-orbit manifold K
1
, right. K
3
depicts some dotted manifold of a discrete symmetry. 0
points the SO
N
unit.
One can watch the process of filling orbits in S
and test their continuity or uniformity. The process
of filling corresponding clusters chosen on the step
(e) in configuration space R
NK
still obeys the IID
condition mentioned above. It was shown, that
configuration clusters in R
NK
can be processed with
basic set-theoretical operations without the lost of
this condition.
In the same time, if the size of the portion M
0
is
small, then the deviations of particular solutions
from the optimal one may be significant; the clusters
may be hardly separable; and the set Y*
1
(M
0
), which
represents the entire set of noticeable variants, may
be too large. It is impossible to change the situation
by increasing the parameter M
1
, although the
primary structure of similarity (b), which is strongly
determined by the size of the portion M
0
, will be
displayed with increasing accuracy as M→∞.
The situation can be changed by increasing the
parameter M
0
: in more representative samples,
foreign configurations will more rarely be chosen as
the centers χ*
∈
Y*
1
(M
0
). In particular, approximate
symmetries and other particular solutions, which
represent the local extrema of F, will have less
pronounced representatives in the primary structure
of similarity in R
NK
. Nevertheless, the ergodicity of
the scheme is preserved; namely, the following
assertion holds: whatever the parameter M
1
and the
approximate symmetry G with maximal support X*
G
in X, if μ(X*
G
)>0, then, for any finite M
0
and M→∞,
the configuration of the symmetry G fills its own
SPATIAL RANK AND APPROXIMATE SYMMETRIES IN SEQUENTIAL RECONSTRUCTION OF DENSE
PACKINGS
213

cluster in R
NK
with nonzero probability. Moreover,
for any approximate (exact) symmetry G the filling
of the G-orbit manifold in S becomes strongly
continuous (respectively, strongly uniform) as
M→∞, whatever the corresponding configuration
template χ* was chosen on the step (c).
5 CONCLUSIONS
We have considered above only the most important
questions related to the application of a sequential
scheme to the construction of optimal packings and
to the determination of symmetries on the base of
some group-theoretical generalization of the Hough
transform. As usual, direct solution of such problems
requires complex optimization computations. The
key point of the approach proposed consists in the
application, instead of the laborious direct solution,
of simple algorithm, that uses this generalization
essentially, during a long enough period of time.
We have introduced a certain parameterization
of Hough type that is able to preserve information
about feature distribution on spatial shapes in the
case of central symmetries, as exact as approximate.
On this base an invariant definition was done for
spatial ranks, which are used in multi-dimensional
sequential scheme in a manner analogous to efficient
usage of boundary points of Parzen windows in
nonparametric density estimation in one dimension.
Some special structure S was constructed, in which
exact and approximate symmetries of arbitrary
spatial shape are revealed along with sequential
reconstruction of optimal K-cluster packings. All
symmetries are sought for via the generalized Hough
transform adjusted to certain types of adjacent
classes on the SO
N
group manifold equipped with
indices j of ranking templates. It was shown that
optimal solutions can be efficiently filtered out due
to good asymptotic behavior of the independent
sequential choice procedure.
The introduction of additional structures into the
sequential scheme that enhance the handling of
detected approximate and exact symmetries could
serve as a development of the approach. Certain
variants of this kind appear due to the presence of
natural scale-spaces associated with maximal filters
of approximate symmetries in the standard subgroup
lattice of SO
N
. The construction of a priori estimates
that describe the dynamics of filling these scale
spaces by the realizations of approximate and exact
symmetries seems to be very important. These
estimates would enable one to obtain an integral idea
about the subordination between symmetries, about
the difference between the approximate and exact
solutions found, and about the number of trials
necessary to reliably filter out exact solutions and
exact symmetries from among them.
ACKNOWLEDGEMENTS
This work was supported by the Russian Foundation
for Basic Research (projects 05-01-00332, 05-07-
90333, 06-01-00492, and 06-01-08-045).
REFERENCES
Chen L.1 et al, 2004. A Fast Efficient Parallel Hough
Transform Algorithm on LARPBS: Parallel and
Distributed Processing with Applications. In The
Journal of Supercomputing, Vol. 29/2, p. 185-195.
Daries C.J., Nixon M.S., 1998. A Hough transform for
detecting the location and orientation of three
dimension surfaces via color encoded spots. In IEEE
Transactions on System, Man and Cybernetics, Vol.
28/1, p. 90-95.
Hough P.V.C., 1962. Method and Means for Recognizing
Complex Patterns. US Patent 3069354.
Leavers V.F., 1992. The book, Shape detection in
computer vision via Hough transform. Springer.
Monari J. et al, 2006. Generalized Hough transform: A
useful algorithm for signal path detection. In Acta
Astronautica, Vol. 58/4, p. 230-235.
Parzen E., 1962. On estimation of a probability density
and mode. In Annals of Mathematical Statistics.
Vol.39, pp. 1065-1076.
Torii A. et al, 2005. The randomized Hough transform for
spherical images and the segmentation of points on the
dual sphere using the metric defined on a sphere. In
CAIP 2005: Computer Analysis Of Images And
Patterns, Versailles.
Vinogradov A.P., 2001. An algorithm generating a
complete set of Parzen-type meshes on samples of
multiple dimension. In Proc. 9-th Int. Conf.
“Knowledge-Dialog-Solution” (KDS-2001), Sankt-
Peterburg, p. 97-101.
Vinogradov A.P., Voracek J., Zhuravlev Yu.I., 2006.
Stochastic Filtering of Approximate Symmetries in
Dense Packings of Clusters. In Pattern Recognition
and Image Analysis. Vol. 16/2, pp. 189-200.
Zhang S.-C., Liu Z.-Q. 2005. A robust, real-time ellipse
detector. In Pattern Recognition, Vol. 38/2, p. 273-
287.
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
214
