
REAL-TIME ADAPTIVE POINT SPLATTING FOR NOISY POINT
CLOUDS
Rosen Diankov* and Ruzena Bajcsy
+
Dept. of Electrical Engineering and Computer Science
University of California, Berkeley, USA
Keywords:
Hardware rendering point-clouds.
Abstract:
Regular point splatting methods have a lot of problems when used on noisy data from stereo algorithms. Just
a few unfiltered outliers, depth discontinuities, and holes can destroy the whole rendered image. We present a
new multi-pass splatting method on GPU hardware called Adaptive Point Splatting (APS) to render noisy point
clouds. By taking advantage of image processing algorithms on the GPU, APS dynamically fills holes and
reduces depth discontinuities without loss of image sharpness. Since APS does not require any preprocessing
on the CPU and does all its work on the GPU, it works in real-time with linear complexity in the number of
points in the scene. We show experimental results on Teleimmersion stereo data produced by approximately
forty cameras.
1 INTRODUCTION
Vision based applications that extract and display 3D
information from the real world are becoming perva-
sive due to the large number of stereo vision packages
available. The 3D information can be used to store
and view virtual reality performances so that view-
ers are free to choose the viewpoint of the scene. A
much more exciting topic called teleimmersion is to
use the 3D information as a form of real-time com-
munication between people at remote locations. In
both these cases, users expect image quality that is in-
distinguishable from reality. However, teleimmersion
requires filtering and displaying the 3D information at
real-time speeds whereas in viewing performances of-
fline, the 3D information can be preprocessed before
hand, so real-time filtering is not an issue. We con-
centrate on the teleimmersion case where the 3D in-
formation is in the form of point clouds computed by
stereo vision. Stereo algorithms produce very coarse
point clouds with a lot of information missing due to
occlusions and lighting conditions. Even if stereo al-
gorithms could compute perfect depths with no out-
liers, the low resolution from the image will be appar-
ent once the user gets close to the surfaces.
Research in the past has tackled point cloud
rendering and filtering from several different direc-
tions. One popular method called point splatting
represents each point as a small gaussian distribu-
tion. By summing up and thresholding these distri-
butions in image space, the algorithm produces very
smooth images (Elliptical Weighted Average Splat-
ting (L. Ren and Zwicker, 2002) and (H. Pfister and
Bross, 2000)). Other algorithms represent the neigh-
borhood of each point by patches (Kalaiah and Varsh-
ney, 2001). (Levoy et al., 2000) and (R. Pajarola,
2004) cover the case where the point clouds are com-
posed of millions of points and the CPU and GPU
have to be synchronized together. There has been
a lot of work in converting point clouds to mesh
data (R Kolluri and O’Brien, 2004) using triangula-
tion based methods. Since there are usually people
in teleimmersion scenes, researchers have fit skele-
tons to the point cloud data (Remondino, 2006) and
(Lien and Bajcsy, 2006). The display component
just uses the skeleton to deform a prior model of an
avatar. But one reason for choosing to work with
point clouds instead of meshes is that point cloud ren-
dering is much more efficient than mesh rendering,
and there has been work done in reducing meshes to
point clouds(Stamminger and Drettakis, 2001). The
filtering and reconstruction step in most of these algo-
228
Diankov R. and Bajcsy R. (2007).
REAL-TIME ADAPTIVE POINT SPLATTING FOR NOISY POINT CLOUDS.
In Proceedings of the Second International Conference on Computer Graphics Theory and Applications - GM/R, pages 228-234
DOI: 10.5220/0002078602280234
Copyright
c
SciTePress

rithms is inherently slow and is usually done offline.
The real-time performance is usually attributed to the
rendering component. Instead of fitting surfaces to
this data in order to remove outliers and fill holes, we
filter the point clouds directly on the GPU with no
processing.
The Adaptive Point Splatting algorithm most
closely resembles Elliptical Weighted Average Splat-
ting (L. Ren and Zwicker, 2002) in that it does all
filtering on the GPU in image space. In EWA, if a
point cloud was computed by densely sampling from
a 3D model without adding any noise to the point po-
sitions, the final point rendering would look just as
sharp as the surface rendering. The intuition behind
the algorithm is that each point represents a probabil-
ity distribution of its color in 3D space. When the
point is rendered, its color distribution is projected
in the image plane. Then all the distributions of all
points are combined and normalized to form the fi-
nal image. If the combined probability is low for any
pixel, that pixel is discarded. Different depths of the
points are taken care of by first computing the depth
of the nearest points to the camera for the whole im-
age. For a given pixel, only points within a certain dis-
tance to the nearest depth contribute to the final pixel’s
color. It is in the final combination steps that EWA
and other point splatting algorithms break down with
noisy point clouds. The reasons will be explained in
Section 2.
An ideal rendering algorithm needs to do three
operations to the point clouds: remove outliers, fill
holes, and smooth the colors on the surface while
maintaining sharpness. Any type of CPU preprocess-
ing like detecting outliers or filling holes will never
run in real-time if there are more than 50,000 points.
While hierarchical processing can speed up the as-
ymptotic time, it will not work because it takes a sig-
nificant amount of time to organize the data in the
right structures before real work can be done on it.
Organizing the data in volumetric structures, might be
faster. However, a large amount of memory is needed
to maintain even a 1000x1000x1000 cube; resolution
is obviously poor. Even ignoring the time issue, it is
still not clear how to fill holes with these data struc-
tures. Without strong prior information, it is impos-
sible to fit surfaces to arbitrary 3D point clouds in
real-time in order to figure out if a hole is present
or not, but holes become pretty clear when looking
at the rendered data in 2D. Since the three operations
only require analysis of the local space around each
point, they can be massively parallelized. Hence, the
approach we take is to use modern GPUs to do all
necessary processing in the image space (Figure 1).
Figure 1: An example comparing the output of previously
proposed splatting algorithms (left) with the current pro-
posed APS method (right). Note that the original point
cloud (middle) is pretty noisy and some information can-
not be recovered at all.
2 POINT SPLATTING REVIEW
Let a point cloud consist of N points {X
i
} with colors
{C
i
} and define a simple multivariate gaussian distri-
bution around each point with covariance {Σ
i
}. Then
the color C(X) at any point X in the 3D space is de-
fined by
C(X ) =
∑
N
i
C
i
P
i
(X)
∑
N
i
P
i
(X)
(1)
P
i
(X) ∝
1
|Σ
i
|
0.5
exp{−
1
2
(X − X
i
)
T
Σ
−1
i
(X − X
i
)} (2)
Here, the probability that the point belongs to
solid space is given by P(X) =
∑
N
i
P
i
(X). Applying
a simple threshold to P(X) and tracing out the result-
ing surface by an algorithm like Marching Cubes will
generate a geometric surface; however, this method is
slow and cannot be done easily using the GPU only.
Fortunately, most of the work can be ported to the
2D projection space (L. Ren and Zwicker, 2002). Let
Σ
∗
i
be the projection
1
of Σ
i
, and ¯x
i
by the projection
of X
i
. Then for any point x in the image, the color
can be computed in the same way as in Equation 1.
The advantage is that an explicit surface doesn’t need
1
The projection of a multivariate gaussian distribution is
again gaussian.
REAL-TIME ADAPTIVE POINT SPLATTING FOR NOISY POINT CLOUDS
229

Figure 2: The original splatting method uses 3 passes: the first pass computes the depth buffer, the second pass renders the
points that only pass this depth buffer, the third pass normalizes the accumulated colors.
Figure 3: GPU render states for the 3-pass splat algorithm.
to be computed, the disadvantage is that the depth in-
formation gets lost and points that project to the same
pixel but have different depths can interfere with each
other. To partially solve this, EWA uses a 3-pass al-
gorithm on the point clouds (Figure 2). To simulate
a probability surface, each point is represented by a
simple quad whose texture coordinates are used to ex-
tract the probability from its projected gaussian dis-
tribution. The quads can be oriented to always face
the camera, or can be given a static orientation if the
surface normal is known apriori. There are various
ways to compute a gaussian probability on the GPU:
a simple texture can be used as a lookup table, or the
probability can be computed directly in the GPU pixel
shaders by applying Equation 1. We use the texture
mapping method because it is faster and much easier
to get working.
The first pass computes the depths of all the near-
est points, so color information is not needed. The
second pass only renders points that are close to the
previously computed depth buffer. The probabili-
ties and colors are combined with additive blending.
The third pass normalizes each color with respect to
the probability and performs the thresholding so that
points with low probabilities are discarded. See Fig-
ure 3 for a description of the GPU state during these
Figure 4: Artifacts occur with the original splatting method
when there are depth discontinuities in the su rface.
passes.
The problem with this simple approach is that
points don’t get filtered and depth discontinuities
cause artifacts (Figure 4). The reason is beacuse the
nearer pixels modify the depth buffer regardless of
what the accumulated probability will be. During
the second pass, only the front pixels are allowed to
be rendered. The third pass sees the low accumu-
lated probability and discards the pixel without con-
sidering pixels on the next nearest layer. This prob-
lem can be easily solved by employing an approach
similar to depth peeling (Everitt, 2001). Depth peel-
ing is an algorithm that can dynamically segment the
view-dependent depth layers on the GPU. In the case
of splatting, if the front layer yields low probabili-
ties, then the next nearest layer will be considered
for rendering. Holes still remain a problem and can-
not be filled easily with the traditional point splatting
method. To reduce holes, the gaussian variance can
be increased or the cutoff threshold can be decreased
so that fewer points are rejected; however, the image
will get blurry and halos around surfaces will appear.
Also, outliers will be rendered as big splats on the
image. The outlier problem can be solved by decreas-
ing the variance or increasing the cutoff threshold,
but obviously that will introduce holes. Clearly there
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
230

doesn’t exist parameters in the simple 3-pass splatting
algorithm that will solve one problem without intro-
ducing another.
3 ADAPTIVE POINT SPLATTING
The intuition behind APS is to perform the 3 EWA
passes multiple times increasing the variance of the
probability distributions each time. Pixels rendered in
one iteration will not be changed anymore in the next
iterations
2
. This scheme ensures that the color in pix-
els that have a high P(x) doesn’t get blended heavily
with its neighbor colors, so image sharpness is pre-
served. Future iterations only deal with pixels with
lower P(x), so the variance can be increased without
sacrificing image sharpness(Figure 5). This adaptive
variance scheme allows the projection to cover a big-
ger area. Also, depth discontinuities won’t be present
because the aggregated cutoff threshold is very low.
The halos around the surfaces due to the low
threshold are solved by first computing a mask in im-
age space of what pixel should be discarded regard-
less of probability. The mask makes sure that edges
are preserved, holes are filled, and outliers are filtered
out. Therefore, the actual point filtering never modi-
fies the real point cloud and is highly view-dependent.
This makes APS more robust to noise because it can
be hard and time consuming to determine an outlier
just from its neighbors in 3D. The APS algorithm can
be summarized as:
1. Compute the black and white mask M by render-
ing the points to a low resolution texture.
2. Repeat 3-5 times. For each succeeding iteration.
(a) Render the depth map for pixels where M is set.
(b) Accumulate the probability and colors where M
is set.
(c) For each pixel that passes the probability
threshold, normalize it and reset the corre-
sponding pixel in M so that it gets ignored in
succeeding iterations.
(d) Increase variance for each point’s distribution.
4 GPU IMPLEMENTATION
DETAILS
The APS algorithm itself is very easy to understand
in pseudocode, but the real challenge is to perform all
computation steps in the GPU as fast as possible. It is
2
Each iteration consists of the 3 EWA passes.
Figure 6: A mask is used to make sure points are filtered and
holes are filled. Note that the hole filling phase preserves the
outer edges.
very important to carefully manage the render targets
for each pass so that the CPU never stalls having to
wait for the GPU to finish rendering. Most graphics
drivers these days buffer the GPU commands so that
the GPU renders the scene while the CPU can per-
form other tasks like receive and decompress the data
from the net. Transferring a render target from video
to system memory is avoided at all costs. In order for
the final point cloud to be rendered along with other
background geometry, each point will have to have a
depth value. Because final points are determined by
the normalization phase, an image processing pass, it
means that their depths will have to be manually set
in the normalization pixel shader from a depth texture.
The normalization phase will write the final points di-
rectly to the real back buffer instead of using a dummy
render target that will later have to be rendered to the
back buffer. Figure 7 details the whole process and
necessary GPU states. One point worth noting is that
any number of iterations and mask computation steps
can be achieved with just 6 different render targets,
which makes APS memory friendly.
4.1 Computing the Mask
The masking effects in each iteration are implemented
through the hardware stencil buffer. In order to fill the
stencil buffer with the appropriate bits, a mask texture
has to be produced. First the point cloud is rendered
with traditional point rendering to a small render tar-
get
3
. Then the render target is used as a texture by
an erode shader that gets rid of outliers. This result
is then used by a holefill shader. For a pixel to be
set, the holefill shader makes sure there are sufficient
pixels on all four sides of the given pixel. Edges are
preserved and holes between the arms are correctly
ignored. Holefill is applied two to four times so that
large holes can be filled. All these passes are achieved
by double-buffering two textures: setting one as a ren-
3
Masks don’t need to have that much resolution, so we
can get away with small render targets for this phase. We
use 256x192 targets when the real back buffer dimensions
are 1024x768.
REAL-TIME ADAPTIVE POINT SPLATTING FOR NOISY POINT CLOUDS
231
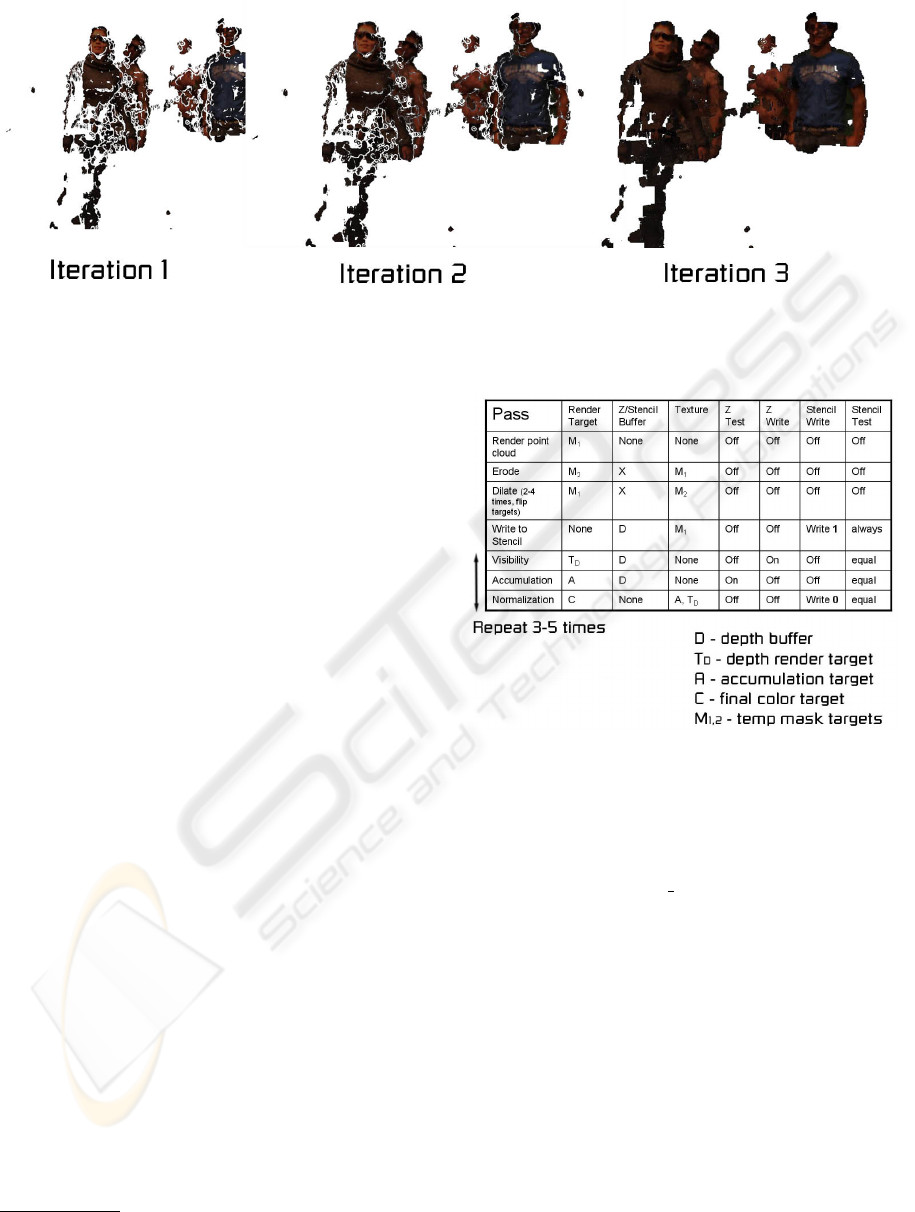
Figure 5: Adaptive Point Splatting performs multiple iterations over the point cloud. In each iteration, it relaxes the conditions
for pixel rejection.
der target while the other is set as a texture and vice
versa (Figure 6).
Once the mask texture is computed, a stencil
buffer of the original back buffer resolution needs to
be filled to be used by the iteration phase. To fill the
stencil buffer, set the targets, disable color writing,
clear the stencil buffer, and render a quad that fills
the whole surface. Set the stencil buffer operation
to write the first bit for every successful pixel. The
shader should read from the final mask texture and
discard
4
pixels if the corresponding texture color is
zero. This will make sure only pixels that are set in
the original texture mask have their stencil bit set.
4.2 Executing an Iteration
During all 3 passes, the stencil buffer must be set to
only accept pixels whose corresponding stencil bit is
set. In the last normalization pass, the stencil buffer
also needs to reset the stencil bit of the accepted pix-
els so they aren’t modified in future iterations. The
first two passes are generally the same as described
in (L. Ren and Zwicker, 2002) except that the first
pass also renders the depth of each pixel to a sepa-
rate texture. This depth texture will then be used in
the normalization phase to ensure that accepted pixels
have the correct depth to be clipped properly by the
background geometry rendered up to this time. In the
second pass, we use the alpha channel to accumulate
the probabilities and the RGB channels to accumu-
late the color. One important implementation detail
when dealing with 16bit floating point render targets
is the precision. There are only 10 bits of precision,
so appropriate scaling in the probabilities is needed to
make sure floating point errors don’t occur.
4
In Cg, there is a discard command that implements this
behavior.
Figure 7: The render states for all the passes associated with
the Adaptive Point Splatting algorithm. Any number of it-
erations can be performed with 6 separate render targets;
therefore the memory complexity is constant with respect
to the iterations.
Altogether 3 ∗ num iterations + 6 passes are
needed for the whole algorithm.
5 EXPERIMENTAL RESULTS
All our experimental results were done on teleimmer-
sion data from UC Berkeley (of California Berkeley,
) where 48 cameras were capture the scene in real-
time. This data is then streamed to one computer act-
ing as the renderer. Besides missing information and
the typical rough estimates of the depths due to the
real-time stereo algorithm, camera calibration errors
persist. Sometimes three cameras could have face
information, but merging them won’t produce a co-
herent face because the three faces could be 1-2cm
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
232

off. The colors are also offset a little due to the dif-
fering lighting from each different location. In each
frame, the point clouds had roughly 75,000 points.
On a 2Ghz machine with a GeForce 6600 card render-
ing at 1024x768 resolution and performing three hole
filling passes and three iterations per frame, the algo-
rithm runs at 10.5 frames per second. Since the points
come from an image and a disparity map, we esti-
mate the normal of the surface of each point by fitting
a plane to the neighboring points. We orient the quad
associated with each point to face the computed local
normal vector. Although computing the normals has
a small performance hit, we find that the resulting im-
age quality is much better than with having the quads
always face the viewer. Figure 8 shows more compar-
isons of Adaptive Point Splatting and traditional point
cloud rendering.
6 CONCLUSION
We presented a GPU technique to deal with noisy
point clouds from stereo data. Such point clouds will
always be present since the stereo algorithms have to
run in real-time. The main incentive to use the GPU
for all processing is that the CPU is usually over-
loaded with many other tasks. Structuring the render-
ing algorithm such that no stalls occur between the
GPU and CPU means that the CPU doesn’t block on
any rendering calls and both processor can truly run
in parallel. Due to a GPU’s parallel processing na-
ture, GPU computing power seems to grow at a much
greater rate than CPU computing power; therefore,
GPU based algorithms will speed up at a greater rate
if their performance is GPU bound, which Adaptive
Point Splatting is. This type of filtering is impossible
to do in real-time on today’s CPUs.
REFERENCES
Everitt, C. (May 2001). Interactive order-independent trans-
parency. In http://developer.nvidia.com/attach/6545.
H. Pfister, M. Zwicker, J. v. B. and Bross, M. (July 2000).
Surfels: Surface elements as rendering primitives. In
SIGGRAPH Proceedings.
Kalaiah, A. and Varshney, A. (June 2001). Differential point
rendering. In Proceedings of the 12th Eurographics
Workshop on Rendering.
L. Ren, H. P. and Zwicker, M. (2002). Object space ewa
surface splatting: A hardware accelerated approach to
high quality point rendering. In Eurographics.
Levoy, M., Pulli, K., Curless, B., Rusinkiewicz, S., Koller,
D., Pereira, L., Ginzton, M., Anderson, S., Davis,
J., Ginsberg, J., Shade, J., and Fulk, D. (July 2000).
The digital michelangelo project: 3d scanning of large
statues. In SIGGRAPH Proceedings.
Lien, J. and Bajcsy, R. (2006). Model driven compression of
3-d tele-immersion data. In Technical Report, EECS
Department, Universityi of California, Berkeley.
of California Berkeley, U. http://tele-immersion.citris-
us.org.
R Kolluri, J. S. and O’Brien, J. (2004). Spectral surface re-
construction from noisy point clouds. In Eurographics
Symposium on Geometry Processing.
R. Pajarola, M. Sainz, R. L. (June 2004). Extreme splatting:
External memory multiresolution point visualization.
In UCI-ICS Technical Report No. 04-14.
Remondino, F. (2006). Image-based modeling for object
and human reconstruction. In Ph.D Thesis ETH No
16562, Institute of Geodesy and Photogrammetry.
Stamminger, M. and Drettakis, G. (June 2001). Interactive
sampling and rendering for complex and procedural
geometry. In Proceedings of the 12th Eurographics
Workshop on Rendering.
REAL-TIME ADAPTIVE POINT SPLATTING FOR NOISY POINT CLOUDS
233
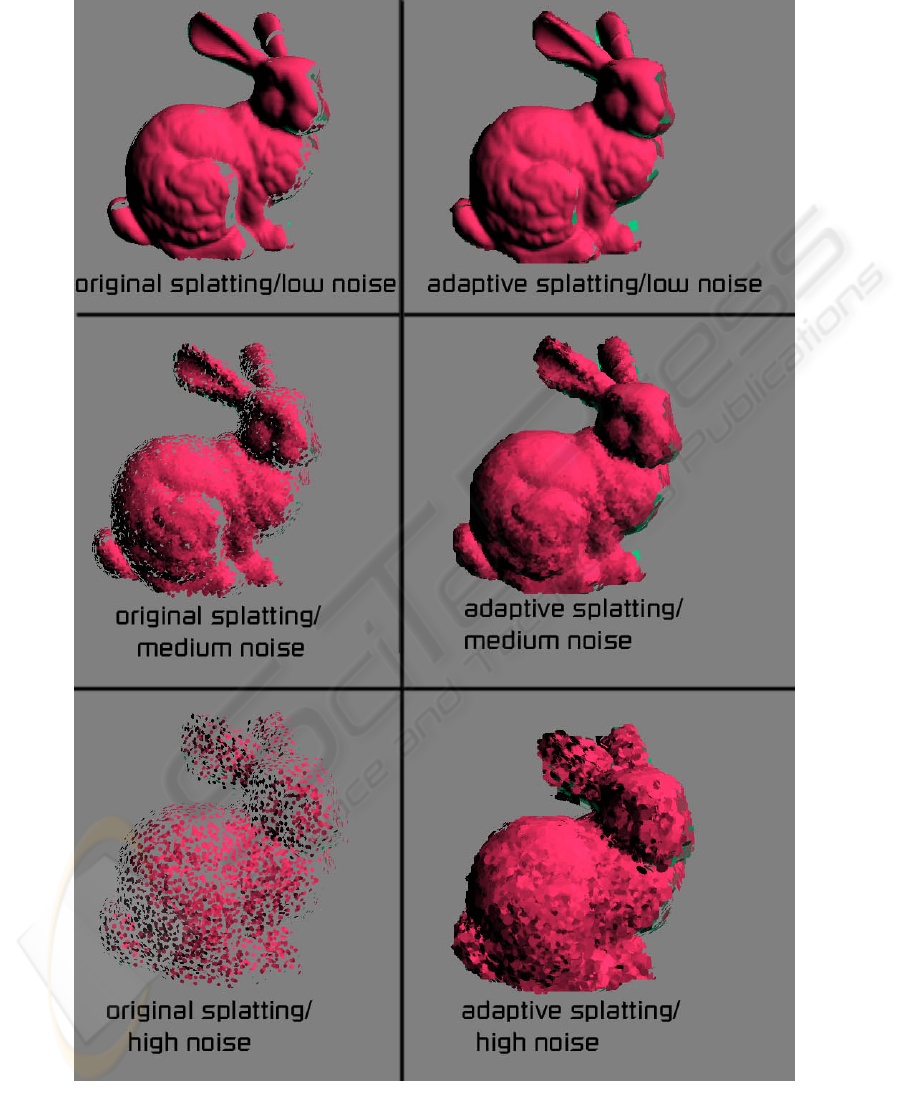
Figure 8: Example comparing the original splatting algorithm (left) with APS (right). Artificial noise was added to the point
clouds on the second and third rows in order to simulate similar irregularities as in the stereo data. Even with a lot of noise,
the APS rendering of the Stanford bunny looks solid and runs in real-time.
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
234
