
LOCAL DISSONANCE MINIMIZATION IN REALTIME
Juli
´
an Villegas and Michael Cohen
University of Aizu - Spatial Media Group; Aizu-Wakamatsu, Fukushima-ken, 965-8580, Japan
Keywords:
Adaptive microtuning, local consonance, SPSA, Pd, tonotopic dissonance.
Abstract:
This article discusses the challenges of applying the tonotopic consonance theory to minimize the dissonance
of concurrent sounds in real-time. It reviews previous solutions, proposes an alternative model, and presents a
prototype programmed in Pd that aims to surmount the difficulties of prior solutions.
1 INTRODUCTION
Perfect consonance can be achieved naturally using
non-fixed tuning instruments such as the trombone.
However, for fixed tuning instruments such as key-
boards, there is no practical way to change tunings
during a performance. Therefore, when fixed and
non-fixed tuning instruments play together, the or-
chestral temperament is necessarily the one used for
fixed-tuning instruments. This fact limits the ability
of the ensemble to achieve perfect consonance.
Minimizing dissonance has been a topic of inter-
est for about six centuries. Some early approaches
tried to adjust the number of steps in the musical scale
so that combinations of different steps produced more
consonant chords in a given context. Scales with
fewer notes – e.g., pentatonic scales – didn’t work
well with western preferences of harmony. Scales
with more than twelve steps, like 36-noted scales used
in the Renaissance, incurred unwanted performance
difficulty. Recent developments use DSP techniques
to adjust incoming sounds to the nearest tone in a
scale template. This adjustment is done in real-time
and is widely used in software and recording studios.
Contemporaneous with these approaches is adap-
tive tuning, or adjustment of local consonance, a tech-
nique in which each tuning of concurrent notes is ad-
justed to achieve minimum dissonance possible at a
given time. Advantages of adaptive tuning include
that a template is unnecessary, and that it can mini-
mize the dissonance of non-harmonic sounds.
Adoption of this technique is limited for a couple
of reasons. First, implementations that utilize MIDI
must work around its limitations as explained later in
this article. Second, most of these implementations
assume a spectrum independent of frequency. This is
not true for real instruments for which spectrum can
change depending on pitch, intensity, etc.
2 DISSONANCE
Dissonance is generally understood as the absence
of consonance. Huron defines consonance as “the
subjective experience of pleasantness, euphonious-
ness, smoothness, fusion, or relaxedness evoked by
sounds” (Huron, 2006). A single theory to explain the
perception of consonance remains elusive.
The tonotopic theory of dissonance was first
proposed by Greenwood (Greenwood, 1961b) and
independently advanced by Plomp and Levelt
(Plomp and Levelt, 1965). It is related to the work of
Helmholtz (v. Helmholtz, 1954), who observed that
dissonance can be explained in terms of ‘roughness’
and ‘beats’ of partials of simultaneous sounds. For
Helmholtz, a difference of tonal frequencies that pro-
duces a maximum dissonance was constant along the
hearing spectrum (frequency-independent.)
Using data from experiments in which subjects
were asked to rate the consonance of a sinewave dyad,
Plomp and Levelt concluded that the transition range
93
Villegas J. and Cohen M. (2007).
LOCAL DISSONANCE MINIMIZATION IN REALTIME.
In Proceedings of the Second International Conference on Signal Processing and Multimedia Applications, pages 93-100
DOI: 10.5220/0002138800930100
Copyright
c
SciTePress
between consonant and dissonant intervals is related
to the critical bandwidth. Specifically, they claimed
that the maximum unpleasantness arises between two
sinewaves separated by 25 percent of a critical band,
adopting the concept of critical band described in
(E. Zwicker et al., 1957). According to them, the dis-
sonance of the dyad grows quickly from zero at the
unison and disappears as the interval exceeds one crit-
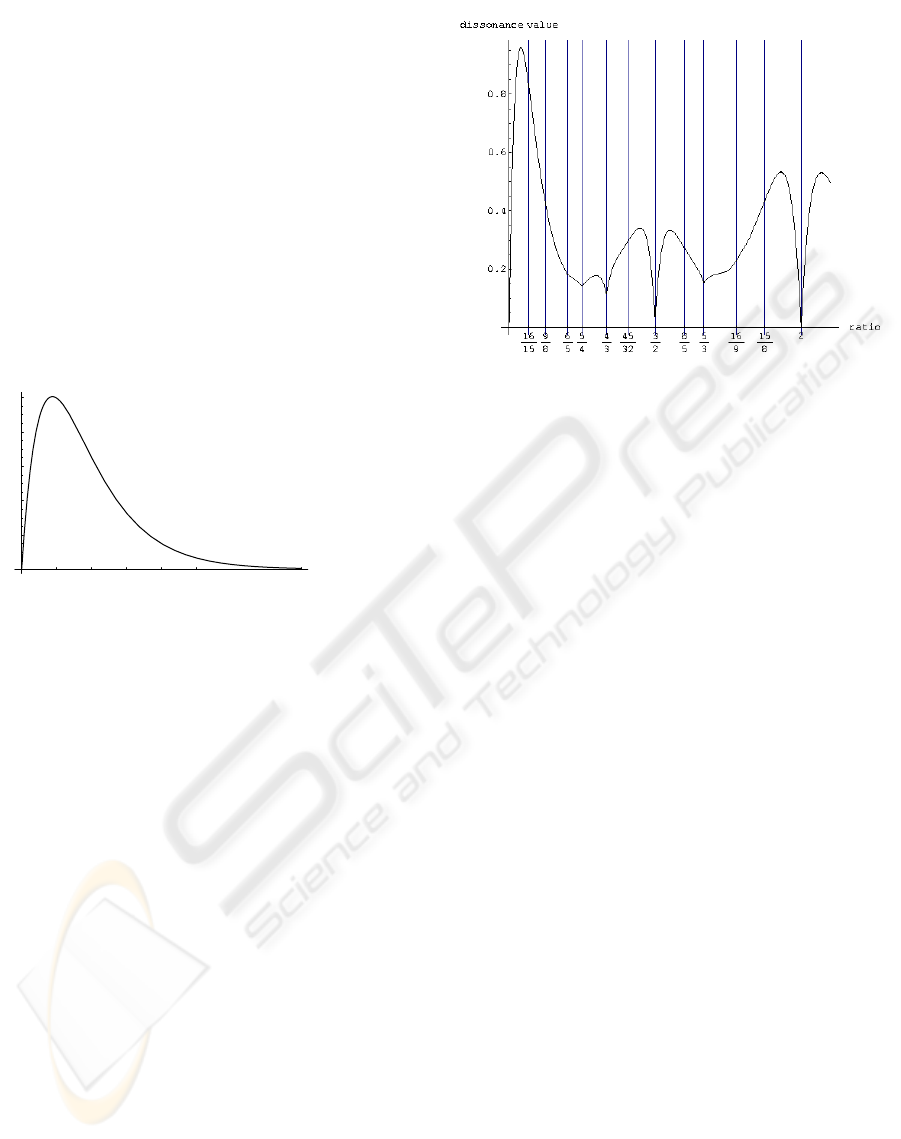
ical bandwidth, as shown in Figure 1. Furthermore,
Plomp and Levelt supposed that for complex timbres
the overall dissonance for a given interval was the ag-
gregate sum of the interactions between all of the con-
stituent partials. Figure2 shows the dissonance curve
of a complex tone according to their findings. The
0.25 0.5 0.75
1
1.25 2
critical bands
0.2
0.4
0.6
0.8
1
dissonance
Figure 1: Averaged dissonance curve of a dyad.
approach of Plomp and Levelt fails to explain why, in
the case of simple sine-waves, an interval sometimes
perceived as dissonant, like a M7 (major seventh), has
a smaller ‘dissonance’ than a P5 (perfect fifth), nor-
mally perceived as very consonant.
Recent research suggests that the estimation of
the critical bandwidth proposed by Zwicker’s group
is too large. Other researchers, notably Green-
wood (Greenwood, 1961a) (Greenwood, 1961b), and
Moore & Glasberg (Moore et al., 1997), have pro-
posed different interpretations of the same phe-
nomenon. The term Equivalent Rectangular Band
(ERB) was introduced by them to avoid confu-
sion with the former notion of critical bands.
One expression to calculate ERB for frequencies
100≤ f ≤ 10,000Hz at moderate levels is
ERB( f) = 0.108f + 24.7, (1)
where ERB is in Hz and f is its center frequency
(Moore et al., 1997). Currently, this model is more
widely accepted.
Figure 2: Dissonance curve for an alto-trombone playing a
440Hz tone. The vertical lines indicate the ratios of Just-
Tuning temperament (JT).
3 PREVIOUS TECHNIQUES
Attempts to achieve perfect consonance have been
made since early stages of western music. In first
approaches, keyboards were constructed with several
keys for the same note. This mechanism allowed
the performer to choose the most suitable pitch de-
pending on the context. One of the most impressive
achievements of this kind was the archicembalo of
Nicola Vicentino (Vicentino, 2006), who constructed
a keyboard capable of playing up to 36 pitches per
octave. His innovation, as well as many others like
it, never became popular due to the skills required to
play them.
3.1 MIDI-based Solutions
MIDI is a hardware and software specification in-
tended to standarize communication among electronic
musical instruments (MIDI, 2001). By using both
MIDI and synthesizers, it is possible to overcome
the physical constraints of the tuning adaptability for
many instruments.
3.1.1 Springs Network
deLaubenfels (deLaubenfels, 2006) proposed a
method for minimizing dissonance in MIDI sequences
using Just-tuning (JT). In this method, musical
intervals are represented by a spring-network. The
accumulated energy of interconnected springs is ex-
pressed as the ‘pain,’ i.e., a dissonance measurement
of the sequence. Any elongation changes in the
SIGMAP 2007 - International Conference on Signal Processing and Multimedia Applications
94

springs affect in turn the net energy of the system.
By minimizing the total energy of the system, the
dissonance is presumed to be also minimized.
Three kinds of springs are used: vertical for simul-
taneous notes, horizontal to represent changes in pitch
of a note while sounding (or successively played), and
grounding springs to penalize the tuning drift of the
whole piece.
deLaubenfels’ program calculates the minimum
energy state of a sequence’s spring-network using
successive approximations produced by Monte Carlo
pseudo-random motion through the tuning space.
This algorithm re-tunes every note in the sequence un-
til zero net spring force is achieved for every interval.
3.1.2 Psycho-acoustical Curves
Sethares (Sethares, 2002b) uses the tonotopic theory
in Adaptun, a program to render more consonant
MIDI sequences in real-time. His algorithm grad-
ually decreases the precalculated dissonance of any
given chord by iteratively making small adjustments
in the pitch. The instrument spectrum for each MIDI
channel is known a priori; the calculation ignores the
amplitudes of the harmonics; a nominal frequency is
used to estimate the bandwidth for all the partials; and
the dissonance gradient is obtained by a variation of
Simultaneous Perturbation Stochastic Approximation
(SPSA).
SPSA is similar to simulated annealing in the way
that perturbation size is damped with every iteration,
but simulated annealing seeks global minima, while
SPSA seeks local minima (Spall, 1999). It uses only
two loss function evaluations per iteration, is tolerant
to noisy signals, and needs no information about the
gradient. The difference between the original SPSA
and the variation proposed by Sethares is that in the
latter, the damping coefficients don’t vanish, allowing
his model to incorporate newly arriving notes.
In Adaptun, tonal drifting is prevented by means
of context, persistence, and memory models. These
mechanisms include absent partials in the dissonance
calculation which are somehow remembered by the
listener. Several musical examples processed with
Adaptun can be downloaded from (Sethares, 2002a).
3.1.3 MIDI Issues
The MIDI protocol specifies three mechanisms to al-
ter the tuning of a single note: Bulk Tuning Dump
(non-realtime), Bulk Tuning Dump Request (non-
realtime), and Single-note Tuning Change (realtime.)
Although this last mechanism is the most suitable for
realtime implementations, it’s rarely found in contem-
porary synthesizers. To circumvent this problem, a
combination of pitch, pitch bend change, and pitch
bend sensitivity is commonly used to achieve the de-
sired frequency of a note. This mechanism is detailed
in (Villegas and Cohen, 2005).
There are several limitations to consider when us-
ing this combination: the pitch bend messages are ap-
plied to a MIDI channel, so the pitch bend value af-
fects all notes in a single channel, making it impossi-
ble to play a chord correctly. Also, if the release time
is long enough, the effect of a new pitch bend message
can be heard on the previous notes.
3.1.4 Observations Regarding Adaptun
Sethares’ program references the dissonance of each
timbre using a frequency of 500Hz. Instead of be-
ing calculated each time, these values are read from
memory easing the realtime implementation.
The use of a nominal frequency implies a uni-
form critical bandwidth across the auditory spectrum.
However, this is not the case. In Adaptun, the band
size error increases as the frequency increases or
decreases. Although Sethares’ implementation and
Helmholtz’s theory assume that the critical bandwidth
is independent of frequency, Plomp and Levelt have
emphasized the salience of the frequency in this cal-
culation.
4 PROPOSED MODEL
The purpose of the function to calculate tonal disso-
nance is to mimic the results obtained by Plomp and
Levelt. Even the value where the dissonance reaches
a maximum is described by them as “a rule of thumb”
(Plomp and Levelt, 1965).
Sethares formulated his model by a least-squares
fit from Plomp and Levelt experimental data. Benson
(Benson, 2005) proposed an alternative expression
d(x) = 4|x|e
1−4|x|
, (2)
where x is the frequency difference as a fraction of
the critical bandwidth. This expression was adapted
to include ERBs, so for a dyad with amplitudes a
1
and
a
2
at frequencies f
1
and f
2
, dissonance is calculated
as
d(a
1
, a
2
, f
1
, f
2
) = 2.5a
1
a
2
∆f
bw
e
1−2.5
∆f
bw
, (3)
where ∆f = | f
2
− f
1
| and bw = ERB(max( f
2
, f
1
)).
According to Plomp and Levelt, the dissonance
reaches a minimum value when the frequency differ-
ence is about one critical band. Beyond this interval,
LOCAL DISSONANCE MINIMIZATION IN REALTIME
95

dissonance decreases rapidly. A mechanism was in-
cluded in this open-form expression to avoid the dis-
sonance calculation when this condition is met:
d(a
1
, a
2
, f
1
, f
2
) =
0if ∆ f > c bw;
2.5a
1
a
2
∆f
bw
e
1−2.5
∆f
bw
else;
(4)
where c is an arbitrary constant greater than unity.
The interaction of complex tones can be conve-
niently represented by matrices:
T
mn
=
f
11
f
12
f
13
··· f
1n
f
21
f
22
f
23
··· f
1n
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
f
m1
f
m2
f
m3
··· f
mn
(5)
A
mn
=
a
11
a
12
a
13
··· a
1n
a
21
a
22
a
23
··· a
1n
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
a
m1
a
m2
a
m3
··· a
mn
, (6)
with the successive frequency components of each
timbre listed in the rows of the timbre matrixT and
the amplitude of each frequency component listed in
matrixA. Both matrices are sized identically by the
numbers of timbres (m) and overtones (n). Based on
these matrices, the following expression is used to
calculate the dissonance of complex tones:
D =
m−1
∑
k=1
m
∑
j=k+1
n
∑
i=1
n
∑
h=1
d(a
ki
, a
jh
, f
ki
, f
jh
). (7)
This equation calculates the sum of the dissonances
for each pair of frequency components belonging to
different instruments. It’s assumed that two consecu-
tive harmonics of a given timbre don’t fall within the
same ERB.
4.1 Implementation Considerations
4.1.1 Vicinity
The unison has the greatest consonance, and should
be passed through as the output as long as no other re-
strictions are imposed. In our algorithm, only vicini-
ties of the given inputs were considered, preserving
the character of the intervals. For example, if a duet
is playing an m3, the output of the algorithm is rec-
ognized as an m3 (minor third) and not an M3 (major
third), which in general has a lesser dissonance value
but different character.
On average, semitones are separated by 100 ¢.
The greatest discrepancy between 12-TET and JT is
about 16 ¢, occurring in the m3 and M6 (major sixth)
intervals. The pitch just noticeable difference (pitch
JND) is around 8.3 ¢ for the most acute region of the
human hearing spectrum, 1 kHz – 3 kHz (Loy, 2006).
Based on these values, a default vicinity of ±8¢ is
used for the application, but there are mechanisms
available that allow the user to adjust it. This default
value is large enough to potentially ‘correct’ a 12-TET
m3 without converting it into a different interval.
4.1.2 Computation Optimizations
The tonotopic theory asserts that frequencies whose
difference is greater than one critical band don’t con-
tribute to the dissonance of complex sounds. It’s pos-
sible to reduce the number of computations when cal-
culating dissonance using this fact: If the dissonance
equals zero when comparing a partial x of a timbre
against a partial y of another timbre, and x < y, then
the dissonance of each of the remaining partials of the
second timbre (ny with n > 1) and x will also be zero.
5 PD-BASED IMPLEMENTATION
Pure-data (Pd) (Puckette, 2006) is a realtime graph-
ical programming language for audio and graphical
processing. It was developed by M. Puckette and is
supported by an active community.
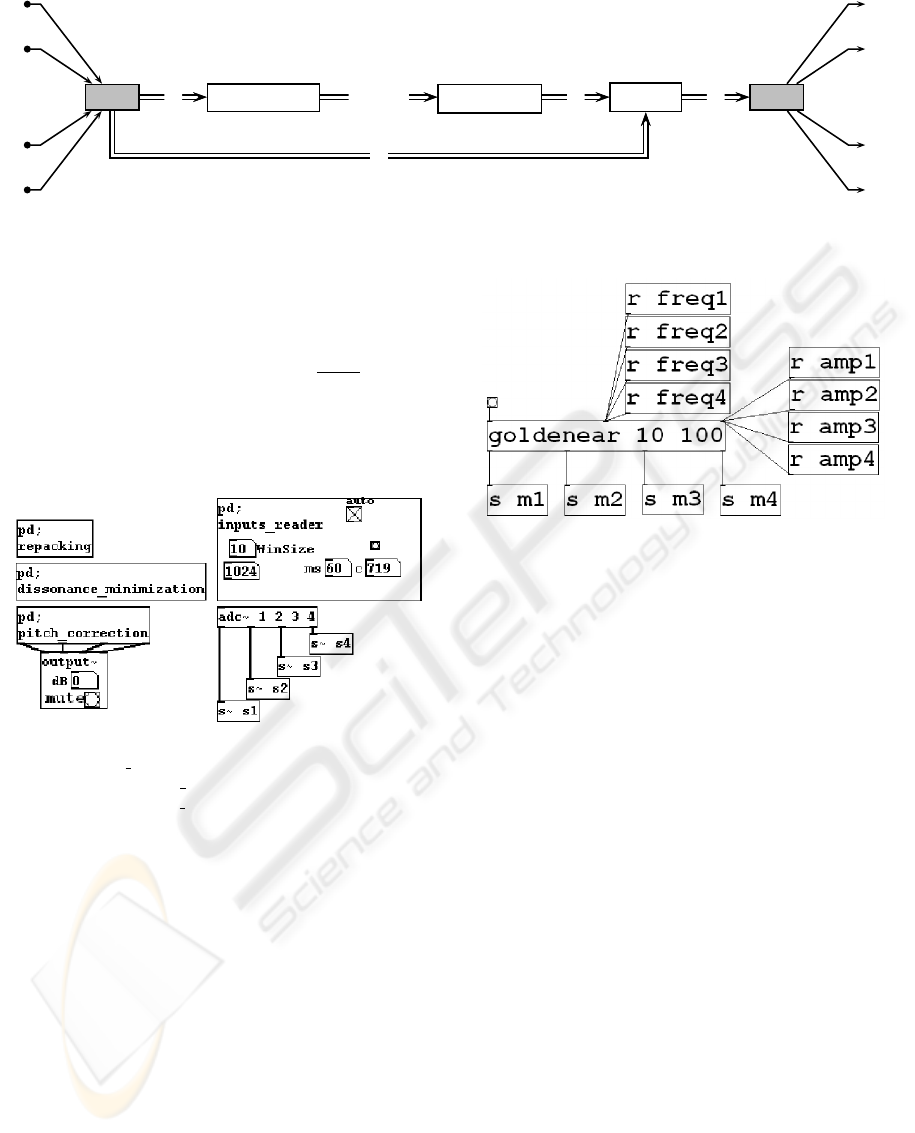
By means of one
adc˜
object, four analog signals
are converted into their digital equivalents. The first
ten partials (fundamentals included) of each signal are
extracted using
fiddle˜
objects. The frequencies and
amplitudes are separated and passed to a
goldenear
object, which calculates target frequencies for each
signal. The pitch correction is performed by single-
sideband modulation (SSB) before final conversion.
Figure3 shows the overall data flow.
Fiddle˜
is a pitch detector. A list of spectral com-
ponents (frequency-amplitude pairs) used in the pitch
determination can be obtained from one of its outlets.
Fiddle˜
parameters and features are not addressed
here, but are explained in (M. Puckette et al., 1998).
Pitch correction is traditionally performed us-
ing vocoders which preserve the formants. Since
vocoders are time (and processor) consuming, SSB
was selected as a simpler but effective alternative.
SSB is a refinement of AM in which one of the
two sidebands is eliminated. This mechanism works
as follows: An original signal x(n) is filtered to obtain
a complex function X(n) which real part is equivalent
to x(n). The used filters implement the Hilbert trans-
formation. The resulting signal is then multiplied by
a complex sinusoid Y(n). The real part of this multi-
SIGMAP 2007 - International Conference on Signal Processing and Multimedia Applications
96
I
1
O
1
I
2
O
2
adc˜ fiddle˜
×
4 goldenear
SSB ×4
dac˜
I
3
O
3
I
4
O
4
digital
signals
4
frequency
components
4× 10× 2
∆f
0
4
digital
signals
4
4
Figure 3: Overall data flow of the implemented solution.
Goldenear
was newly created for the purposes of this research.
plication has partials at the frequency components of
x(n) plus the frequency of Y(n). The resulting signal
can be expressed as
x
m
(n) = ℜ{X(n)Y(n)} = ℜ{X(n)e
(
±ı2πf
0
n
f
s
)
}, (8)
where f
0
is the frequency of the carrier Y(n) and f
s
is
the sampling frequency. Figure4 shows a screenshot
of GUI for the implemented patch.
Figure 4: Implemented GUI in Pd.
Fiddle˜
objects are in-
side the ‘
inputs reader
’ block,
goldenear˜
objects are
inside the ‘
dissonance minimization
’ block, and SSB
objects are in the ‘
pitch correction
’ block.
5.1 Goldenear
Goldenear
was created by the first author to calculate
target frequencies in the vicinity of the fundamentals
of the input signals. In this Pd-object, the user can
specify the vicinity in ¢ and the maximum number
of iterations to evaluate the dissonance function, as
shown Figure 5.
When a new tone is detected, its amplitudes and
frequencies are sent to
goldenear
. A label is prefixed
to each frequency and amplitude list to distinguish be-
tween the signals. In the SPSA estimation, fundamen-
tal frequencies are modulated but the overtone ratios
are preserved. Also, since the frequency range of the
hearing spectrum is broad, the modulations are scaled
so they represent the same percentage of change for
each fundamental frequency.
Figure 5:
Goldenear
as connected in the implementation.
Practical and asymptotic expressions to calculate
the damping rates are provided in (Spall, 1998). How-
ever, the dissonance problem doesn’t fit the canonical
form of SPSA, so in this research, these values were
selected by trial and error. SPSA delivers good ap-
proximations of the gradient (Spall, 1999). When the
algorithm fails in finding better tunings for the fun-
damentals, the original tones are passed through as
output.
The dissonance is calculated thrice for each SPSA
iteration: twice due to the intrinsics of SPSA and once
to monitor the partial solutions. If the dissonance falls
below a threshold, the current solution is selected and
the rest of the iterations are skipped. This extra evalu-
ation potentially saves some cycles in the dissonance
calculation.
5.2 Limitations
Our solution has several limitations: Tonal drift is not
explicitly prevented; there are times when the ERB
function is extrapolated; in the event of simultane-
ous signals, only one is analyzed due to the mono-
threaded nature of the application as imposed by Pd’s
paradigm; finally, sounds with long transients cannot
be processed adequately. Although polyphonic sig-
nals can be processed, best results are achieved when
monophonic signals are used because the algorithm
can detect the fundamentals more easily.
LOCAL DISSONANCE MINIMIZATION IN REALTIME
97
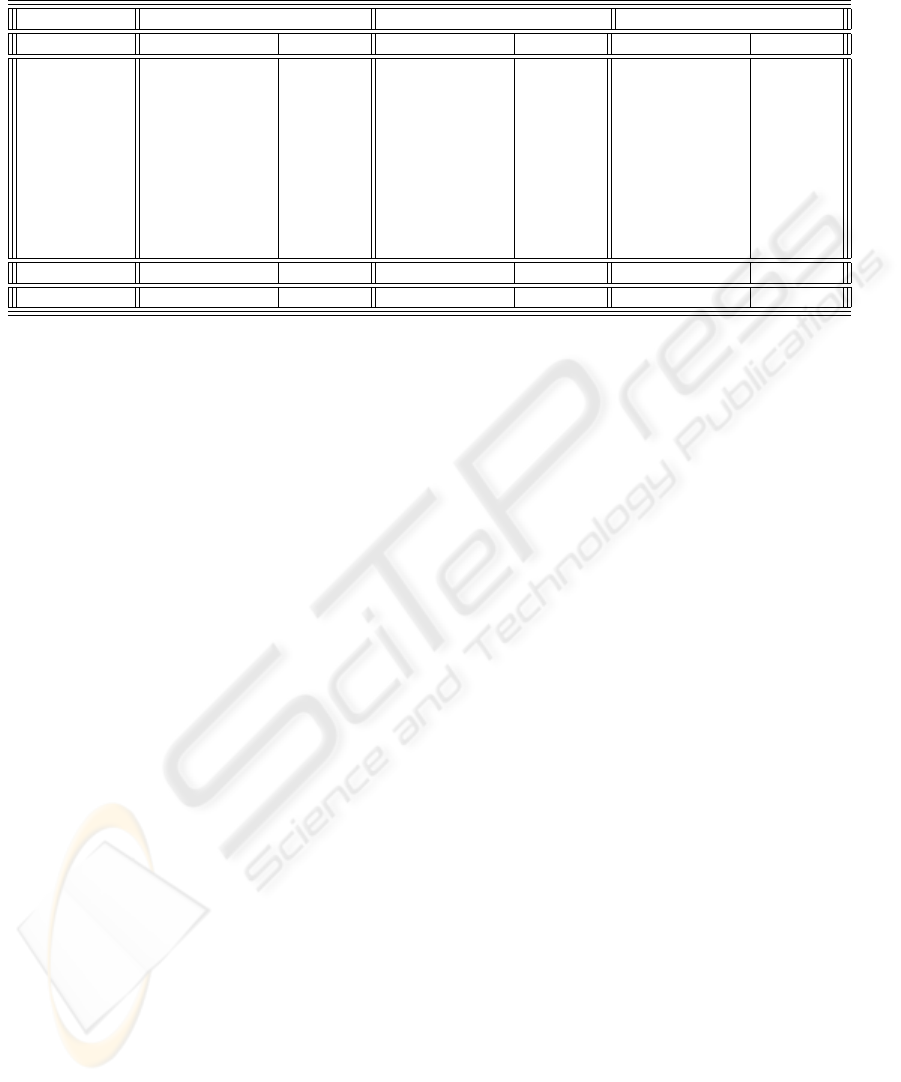
Table 1: Convergence results. Emboldened values indicate when the algorithm was unable to minimize the dissonance. The
initial dissonance was 8.42
Iterations 50 100 200
Trial final dissonance time (ms) final dissonance time (ms) final dissonance time (ms)
1 5.25 4.8 4.9 9.56 5.64 18.69
2 7.12 4.61 6.59 9.64 3.49 18.91
3 7.57 4.85 8.9 9.42 3.49 18.62
4 7.46 4.82 6.78 9.51 3.43 18.87
5 8.14 4.58 6.28 9.29 5.79 20.44
6 8.63 4.8 4.29 9.65 3.48 20.22
7 5.72 4.83 4.59 9.59 4.67 18.89
8 7.56 4.78 6.8 9.55 3.29 18.98
9 8.45 4.82 8.94 9.46 6.18 18.66
10 7.32 4.81 6.28 9.61 4.29 18.92
Average 7.32 4.81 6.28 9.61 4.29 19.92
Std. Dev. (σ) 1.09 0.09 1.6 0.11 1.13 0.65
6 TESTS AND RESULTS
The platform for the tests comprised a Pentium
Xeon@2.79GHz with 1GB of RAM running MS
Windows XP, configured with an Edirol UA-101 au-
dio adapter using ASIO 2.0 drivers. The audio
was sampled at 48kHz, with an amplitude reso-
lution of 16 bits. The FFT analysis window was
1024 samples wide. Only monophonic signals were
presented as inputs. The signals were synthe-
sized versions of an alto-trombone extracted from
(Sandell, 1994). The Pd patches and audio ex-
amples for this research can be downloaded from
http://sonic.u-aizu.ac.jp/goldenear
.
6.1 Convergence Tests
For the convergence tests,
goldenear
was initialized
with a vicinity of 50 ¢ and fed four signals. The cho-
sen frequencies were intended to force the algorithm
to use a maximum number of iterations.
The elapsed time was measured using a Pd native
object. Final dissonances and elapsed time were mea-
sured after 50, 100, and 200 iterations. The results are
averaged and summarized in Table1. This data con-
firms that increasing the number of iterations lowers
dissonance levels. For 200 iterations, the dissonance
reduction was about 51 percent. The average time re-
quired for such a reduction was about 20 ms. When
fewer iterations were used, the algorithm occasion-
ally failed to find better combinations of frequencies.
In those cases, the output was identical to the input.
6.2 Consonance Tests
Consonance tests were conducted to analyze the per-
formance of the algorithm presented with several
pairs of complex tones. The parameters were set at
a vicinity of 200 ¢ and a maximum of 200 iterations.
The frequencies were selected to fall within one crit-
ical bandwidth when the order of magnitude of the
fundamentals were comparable. It was also important
to ensure that at least one trial for each order of mag-
nitude was included.
There were two circumstances in which only one
evaluation was necessary for the algorithm: combi-
nations of frequencies in which no partials interacted
with each other, and comparison of a 3,500Hz tone
against itself. This fast calculation is a consequence
of the mechanism included to detect early conver-
gences. A similar reduction on iterations can be ob-
served in the interaction between frequencies of 4,000
and 4,100Hz. Table 2 summarizes the results.
7 CONCLUSIONS
A novel approach to generate a dissonance-minimized
version of concurrent sounds in real-time was pre-
sented. This method, based on the tonotopic conso-
nance theory, reduces the dissonance of sound sources
in real-time conserving their original character with-
out the use of a template. The proposed model works
best with harmonic sounds.
No subjective tests were conducted to validate the
results. However, they are in agreement with those of
other authors, and the convergence time of the algo-
rithm makes it adequate for practical applications like
SIGMAP 2007 - International Conference on Signal Processing and Multimedia Applications
98
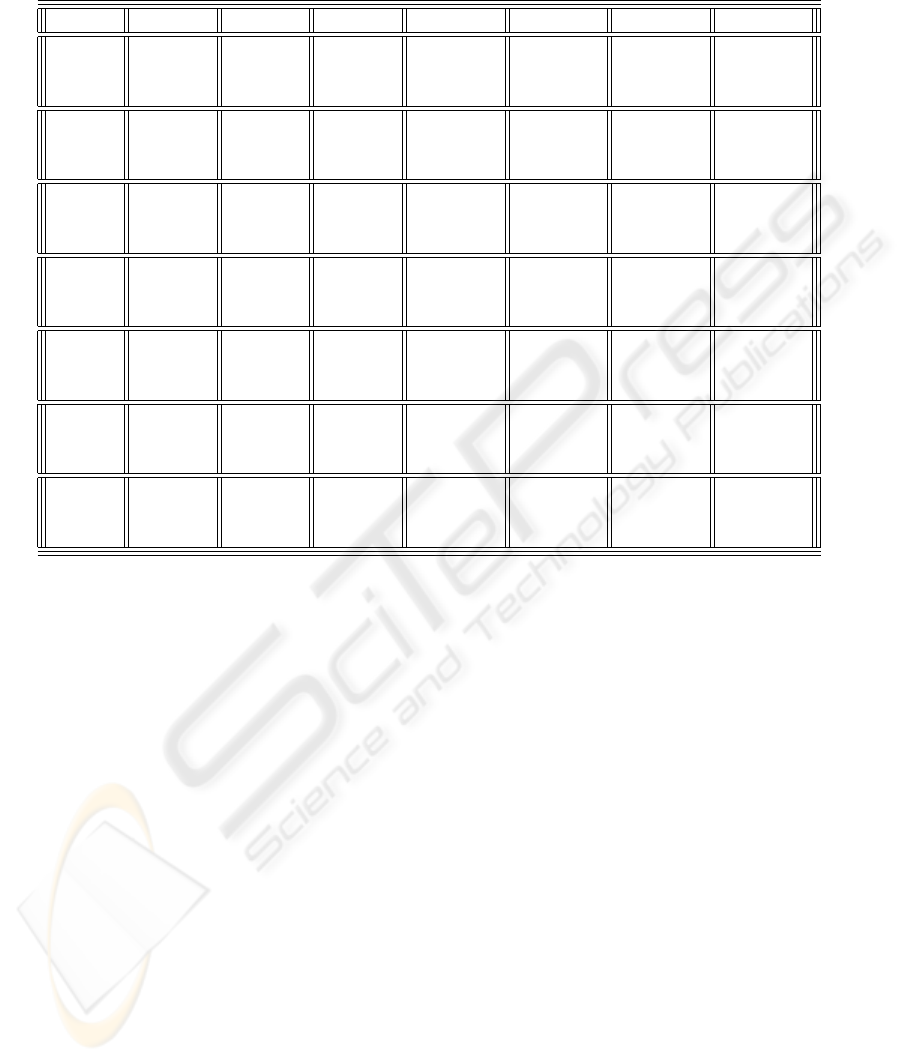
Table 2: Consonance results for a vicinity of 200 ¢ and 200 iterations. Each entry presents the original dissonance, the final
dissonance, and the number of iterations used. The emboldened results indicate when the algorithm was unable to find a
solution.
(Hz) 50 250 500 3,500 4,100 8,000 10,000
2.43794 0.23803 0.02993 0 0 0 0
60 2.13064 0.14365 0.02990 0 0 0 0
200 200 200 1 1 1 1
0.13261 1.51361 0.99174 0 0 0 0
280 0.07437 0.36581 0.85732 0 0 0 0
200 200 200 1 1 1 1
0 0.43215 0.30562 0.04310 0.04429 0 0
600 0 0.09146 0.15989 0.01501 0.03633 0 0
1 200 200 200 200 1 1
0 0 0.00578 0.000924 0.110313 0.535633 0.44375
3,500 0 0 0.00610 0.000924 0.113752 0.128432 0.385192
1 1 1 1 200 200 200
0 0 0.01502 0.82770 1.46862 0.00727 0.02849
4,000 0 0 0.01794 0.11263 0.00870 0.00759 0.02978
1 1 200 200 65 1 200
0 0 0 0.14990 0.52446 1.67656 0.13377
8,300 0 0 0 0.14696 0.01318 0.03017 0.13113
1 1 1 200 200 200 200
0 0 0 0.40320 0.35031 0.55946 1.23280
11,000 0 0 0 0.40305 0.34235 0.50941 0.99666
1 1 1 200 200 200 200
harmonizing performances of multiple instruments
with different tunings, learning how to sing or play
instruments in tune, learning harmony and musical
scale theory, freeing instruments from tuning restric-
tion.
REFERENCES
Benson, D. (2005). Mathematics and Music, chapter 4.
Consonance and dissonance. Cambridge University
Press. ISBN 0-521-85387-7.
deLaubenfels, J. (2006). Studio j: John deLaubenfels’
basement project. Retrieved March 13, 2007 from
personalpages.bellsouth.net/j/d/jdelaub
.
E. Zwicker, G. Flottorp, and S. Stevens (1957). Critical
bandwidth in loudness summation. J. Acoustical So-
ciety of America 29 (5), pages 548–557.
Greenwood, D. (1961a). Auditory masking and the critical
band. J. Acoustical Society of America 33 (4), pages
484–502.
Greenwood, D. (1961b). Critical bandwidth and the fre-
quency coordinates of the basilar membrane. J.
Acoustical Society of America 33 (4), pages 1344–
1356.
Huron, D. (2006). Music cognition handbook: A dictio-
nary of concepts. Retrieved March 13, 2007 from
musiccog.ohio-state.edu/Resources/Handbook.
Loy, G. (2006). Musimathics, volume 1. MIT Press. ISBN 0-
262-12282-0.
M. Puckette, T. Apel, and D. Zicarelli (1998). Real-time
audio analysis tools for pd and msp. Proc. Int. Com-
puter Music Conf. Retrieved March 13, 2007 from
www.crca.ucsd.edu/
˜
tapel/icmc98.pdf
.
MIDI, M. A. (2001). The Complete MIDI 1.0 Detailed
Specification, chapter Section 2. MIDI Manufacturers
Association.
Moore, B., Glasberg, B., and Baer, T. (1997). A model
for the prediction of thresholds, loudness, and partial
loudness. J. Audio Engineering Society 45 (4), pages
224–40.
Plomp, R. and Levelt, W. (October 1965). Tonal conso-
nance and critical bandwidth. J. Acoustical Society of
America, pages 548–560. Volume 38, Issue 4.
Puckette, M. (2006). Software by Miller Puck-
ette. Retrieved March 13, 2007 from
www.crca.ucsd.edu/
˜
msp/software.html
.
Sandell, G. J. (1994). SHARC - Sandell harmonic archive.
release 0.921.
Sethares, W. (2002a). Adaptun. Re-
trieved March 13, 2007 from
eceserv0.ece.wisc.edu/
˜
sethares/adaptun
.
LOCAL DISSONANCE MINIMIZATION IN REALTIME
99

Sethares, W. (2002b). Real-time adaptive tunings using
Max. J. New Music Research Vol. 31 No. 1, pages
1–7.
Spall, J. C. (1998). An overview of the simulta-
neous perturbation method for efficient optimiza-
tion. Johns Hopkins APL Technical Digest Vol. 19,
pages 482 – 492. Retrieved March 13, 2007 from
www.jhuapl.edu/SPSA/
.
Spall, J. C. (1999). Stochastic optimization: Stochastic
approximation and simulated annealing. Encyclope-
dia of Electrical and Electronics Engineering, pages
529– 542.
v. Helmholtz, H. (1954). On the Sensations of Tone as a
Physiological Basis for the Theory of Music, chapter
VIII, On the beats of simple tones. Dover Publica-
tions, ii english edition.
Vicentino, N. (2006). L’antica musica ridotta alla mod-
erna prattica. Retrieved March 13, 2007 from
visualiseur.bnf.fr
.
Villegas, J. and Cohen, M. (2005). Melodic stretching with
the Helical Keyboard. In Proc. 2
nd
Int. Conf. on Enac-
tive Interfaces 2005. IST Network of Excellence EN-
ACTIVE.
SIGMAP 2007 - International Conference on Signal Processing and Multimedia Applications
100
