FACE DETECTION AND TRACKING IN DYNAMIC BACKGROUND
OF STREET
Jacek Naruniec, Władysław Skarbek
Faculty of Electronics and Information Technology, Warsaw University of Technology
Nowowiejska 15/19, 00-665 Warszawa, Poland
Antonio Rama
Dept. Teoria del Senyal i Comunicacions, Universitat Polit´ecnica de Catalunya (UPC), Barcelona, Spain
Keywords:
Face detection, face tracking, Gabor filter, Linear Discriminant Analysis, Dual Linear Discriminant Analysis,
reference graph.
Abstract:
The paper presents a novel face detection and tracking algorithm which could be part of human-machine in-
teraction in applications such as intelligent cash machine. The facial feature extraction algorithm is based
on discrete approximation of Gabor Transform, called Discrete Gabor Jets (DGJ), evaluated in edge points.
DGJ is computed using integral image for fast summations in arbitrary windows and by FFT operations on
short contrast signals. Contrasting is performed along radial directions while frequency analysis along angular
directions. Fourier coefficients for a small number of rings create a feature vector which is next reduced to few
LDA components and then compared to the reference facial feature vector. Detected eyes and nose corners
are chosen to fit reference face by spatial relationships. Tracking is based on the same rule, but the corners are
searched only within already detected facial features neighborhood. Optionally for face normalization eyes
centers are found as centers of outer and inner eye corners. Comparison of manual and automatic eye center
detection shows still significant advantage of manual approach, measured in terms of accuracy in face recog-
nition by Linear Discriminant Analysis (LDA) and Dual Linear Discriminant Analysis (DLDA) algorithms.
1 INTRODUCTION
Face detection is important preprocessing task in bio-
metric systems based on facial images. The result
of detection gives the localization parameters and it
could be required in various forms, for instance:
• a rectangle covering the central part of face;
• a larger rectangle including forehead and chin;
• eyes centers (the choice of MPEG-7 (MPEG-7,
2004));
• numerous landmarks including eyes, nose and
mouths corners, eyebrows, nostrils;
• two eyes inner corners and two nose corners (the
choice of this paper).
While from human point of view the area param-
eters are more convincing (cf. Fig. 1), for face recog-
nition system fiducial points are more important since
they allow to perform facial image normalization –
the crucial task before facial features extraction and
face matching (Beumer et al., 2006).
Figure 1: Area versus fiducial points parameters for face
localization.
We may observe for each face detector the follow-
ing design scheme (Yang et al., 2002):
1. Define admissible pixels and their local neighbor-
hoods of analysis. Admissible pixels could cover
the whole image area or its sparse subset, for in-
stance edge or corner points. The neighborhoods
could consist of one pixel only or even thousands
of them forming rectangular windows of analysis
or for instance rings of small rectangles (cf. Fig.
414
Naruniec J., Skarbek W. and Rama A. (2007).
FACE DETECTION AND TRACKING IN DYNAMIC BACKGROUND OF STREET.
In Proceedings of the Second International Conference on Signal Processing and Multimedia Applications, pages 404-410
DOI: 10.5220/0002142404040410
Copyright
c
SciTePress

2).
2. Design a feature extractor which produces a col-
lection of features for each admissible local neigh-
borhood. It may be as simple as admissible pixel
color frequency or as complex as long vector of
100 Angular Radial Transformation (ART) coef-
ficients.
3. Design a classifier which decides whether the col-
lection of features extracted from the given neigh-
borhood of analysis could be face relevant. If so
the admissible pixel becomes face relevant point.
It could be a simple classifier based on compari-
son of feature with a threshold or more complex
Support Vector Machine (SVM classifier) using
Gaussian kernel.
4. Define a post-processing scheme which selects
representative face relevant points defining face
locations. The representatives could be obtained
as centroids of connected components in the set of
all face relevant points or results of more complex
clustering scheme combined with graph matching
to reject inconsistent ensembles of face relevant
points.
On top of the above scheme each detector includes a
multi-resolution mechanism to deal with face size. It
is implemented either through analysis in image pyra-
mid or by scaling the local neighborhood of analysis
together with relevant parameters.
Figure 2: Rings of small squares as neighborhoods of anal-
ysis in our method.
One of the most known face detectors is based on
AdaBoost classifier. It was introduced by Viola and
Jones in 2001 (Viola and Jones, 2001). Let us trace
the design scheme of this prominent method:
1. The local neighborhood of analysis is a small win-
dow of size 20×20 scaled up by 20%. The pixel is
admissible if and only if it is upper left corner of
the analysis window completely included in im-
age domain.
2. In analysis window at fixed positions small con-
trasting filters are defined of specific size and type.
The filter returns the contrast between white and
black region defined as the difference between to-
tal intensities in the regions.
3. The regional contrast is compared with filter spe-
cific threshold giving a weak classifier. The weak
decisions are linearly combined using cost coef-
ficients elaborated according the AdaBoost ma-
chine learning scheme. The AdaBoost is a multi-
classifier well known from the late 1980s which
due a special weighting scheme of training exam-
ples ensures the high performance of strong clas-
sifier providing that weak classifiers have the suc-
cess rate about 0.5. Authors of (Viola and Jones,
2001) applied an early and suboptimal heuristics
given for AdaBoost training algorithm in (Fre-
und and Schapire, 1997). However, their face
recognition system described in (Jones and Vi-
ola, 2003) which also used the AdaBoost concept,
contained the optimal training procedure which is
methodologically sound. The algorithm proposed
by them is a generalization of one described in
(Shapire, 2002).
4. In post-processing stage the centroid of enough
large connected components of face relevant win-
dow corners represents the detected face window.
While AdaBoost is satisfactory solution for fa-
cial window detection, its extensions to detect fidu-
cial points, for instance eye centers, are not equally
effective. The normalization of facial image based on
AdaBoost is not accurate and it results in poor face
recognition and verification. In this paper we develop
a novel method for detection of face fiducial points
which is based on very rough discrete approximation
of Gabor transform called here Discrete Gabor Jet
(DGJ). The method gives very good results for de-
tection of frontal face views with almost perfect false
acceptance rate.
In practice when we deal with a temporal se-
quence of images face detection cooperates with face
tracking. There are many techniques for object track-
ing in video. However, having robust face detector the
simple practical approach is its local use for each im-
age frame interleaved by global face detector called
with the frequency proportional to motion activity of
tracked objects.
2 DGJ FACE DETECTOR
The whole process of face detection consists of sev-
eral steps illustrated in Fig. 3. The fiducial points are
FACE DETECTION AND TRACKING IN DYNAMIC BACKGROUND OF STREET
415

searched only within edge points in the image. Canny
edge detector’s low and high thresholds must be set to
a very small value, that even with poor lighting con-
ditions, no feature’s edges could be discarded.
Edge
detector
Fiducial
points
detector
Graph matching
Merging
neighbours
Figure 3: Illustration of all steps for our face detector.
The feature extraction in local neighborhood of
analysis is performed in two stages. Firstly the fre-
quency analysis is performed on selected rings (first
type coefficients) and on contrasts between pairs of
rings (second type coefficients). In the second stage a
modified LDA analysis produces many-dimensional
features discriminating face and non-face fiducial
points. Each type of fiducial point has its specific
LDA matrix.
The classifier for the particular fiducial point is
based on distance to the centroid of fiducial feature
vectors. The standard ROC is built up to tune the dis-
tance threshold to the required false acceptance rate.
2.1 Extractor I: Discrete Gabor Jet
The kernel of Gabor filter (Gabor, 1946) in spatial im-
age domain is a Gaussian modulated 2D sine wave
grating with parameters controlling wave front spatial
orientation, wave frequency and rate of attenuation.
While Gabor wavelet is accurate tool to represent lo-
cal forms with complex textures its computation ex-
cludes real time applications in pure software imple-
mentations.
Therefore we seek for the representation which
can describe changes of local image contrasts around
the given pixel in both angular and radial direction. To
this goal we design rings of small squares and evalu-
ate frequency of luminance changes on such rings (cf.
Fig. 2).
There are two types of Gabor jets. The first type
detects angular frequency on selected rings while the
second type represents angular frequencies for radial
contrast between two selected rings.
(x, y)
R
Ring function (f) FFT (f)
R2
R1
Second jet mean squares values
First jet mean squares values
FFT
FFT result
Figure 4: First type jet (up) – frequency features on single
ring of squares, and second type jet – frequency features of
double ring of squares.
First type jets. The concept is illustrated in Fig. 4
in upper part.
Each jet of the first type is characterized by radius
r of the ring, the number of squares n = 2
k
, the cen-
ter (anchoring) point (x,y). The sizes of all squares
on the ring are equal. The size is the maximum possi-
ble providing that squares do not intersect each other
(except of intersection perhaps by one pair).
The sum of pixel values in each square is com-
puted using the integral image like in AdaBoost detec-
tor (Viola and Jones, 2001). The sequence of n such
values is normalized to be included in the unit interval
[0,1]. Finally the obtained sequence f is transformed
by FFT. Only the first n/2 of DFT complex coeffi-
cients are joined to the output feature vector.
Second type jets. The idea is shown in Fig. 4 in
bottom part.
Now the jet consists of two rings with radii r
1
< r
2
with the same center (x,y) and with the same number
n = 2
k
of equal size squares.
Like for the first type jets the sum of pixel values
in each square is computed using the integral image,
but now the mean value of each square is computed.
Differences between mean values of each square in
the first ring and the corresponding mean values in
second ring are taken. Next the obtained differen-
tial signal is normalized to the unit interval and then
transformed by FFT. Again only the first n/2 of DFT
complex coefficients are joined to the output feature
vector.
In the final design of Gabor jets for base points
detection and tracking (two inner eye corners and two
nostril corners) we take four jets of the first kind and
two jets of the second with parameters defined in the
following table:
After the first stage of feature extraction, the fea-
ture vector has 3∗ 16 + 3 ∗ 32 = 144 of real compo-
SIGMAP 2007 - International Conference on Signal Processing and Multimedia Applications
416

Table 1: Jets for base points detection.
type
1 1 1 1 2 2
n 16 16 32 32 16 32
r
1
16 24 12 19 16 12
r
2
– – – – 24 19
nents.
For outer eyes corners we cannot use whole rings,
which would cover also area outside the face. In this
case we use only right and left halves of the jets to
analyze only the desired face region. Because the in-
formation is now smaller, we have to use more rings
to achieve good detection results.
2.2 Extractor II: Modified Linear
Discriminant Analysis
Having DFT description over local rings as feature
vector of length 240 we discriminate them using a
Modified Linear Discriminant Analysis (MLDA).
In case of face detection when we deal with two
classes only, i.e. with facial descriptions and non-
facial descriptions, the classical LDA enables only
scalar discriminative feature. It makes harder separa-
tion of two classes by linear approach. More informa-
tion about classified region is required. Therefore we
modify the concepts of within and between-variances
and related scatter matrices, in order to get vectorial
discriminative features.
Namely, the classical LDA maximizes the Fisher
ratio of between-class variance over within-class vari-
ance defined as follows ((Fisher, 1936),(Fukunaga,
1992)):
f
X
:=
var
b
(X)
var
w
(X)
var
w
(X) :=
1
|I
f
|
∑
i∈I
f
kx
i
−
x
f
k
2
+
1
|I
¯
f
|
∑
i∈I
¯
f
kx
i
−
x
¯
f
k
2
var
b
(X) := k
x
f
− xk
2
+ kx
¯
f
− xk
2
(1)
where the training set X of feature vectors is divided
into the facial part indexed by I
f
and the non-facial
part with remaining indices I
¯
f
.
It appears that we obtain better discrimination re-
sults with the following class separation measure:
m
X
:=
mvar
b
(X)
mvar
w
(X)
mvar
w
(X) :=
1
|I
f
|
∑
i∈I
f
kx
i
−
x
f
k
2
mvar
b
(X) := k
x
f
− xk
2
+
1
|I
¯
f
|
∑
i∈I
¯
f
kx
i
−
x
f
k
2
(2)
Like in classical case, the optimization procedure
requires replacing variances by traces of scatter ma-
trices:
m
X
:=
trace(S
mb
(X))
trace(S
mw
(X))
S
mw
(X) :=
1
|I
f
|
∑
i∈I
f
(x
i
−
x
f
)(x
i
− x
f
)
t
S
mb
(X) := (
x
f
− x)(x
f
− x)
t
+
1
|I
¯
f
|
∑
i∈I
¯
f
(x
i
−
x
f
)(x
i
− x
f
)
t
(3)
Since for the large number of positive training ex-
amples the scatter matrix S
mw
is of full rank then
we can optimize m(W) := m
W
t
X
w.r.t. the training
set X by Cholesky factorization ((Golub and Loan,
1989)) of S
mw
= C
mw
C
t
mw
and solving the following
EVD problem for the symmetric, semi-definite matrix
S
′
mb
:= C
−1
mw
S
mb
C
−t
mw
:
S
mb
W = λS
mw
W, S
mw
= C
mw
C
t
mw
, W
′
= C
t
mw
W
S
′
mb
= W
′
Λ(W
′
)
t
W = C
−t
mw
W
′
(4)
If columns of W
′
are sorted by decreasing eigenval-
ues λ
i
and we want to have n ≥ 2 LDA features then
we select from W the first n columns as the optimal
solution.
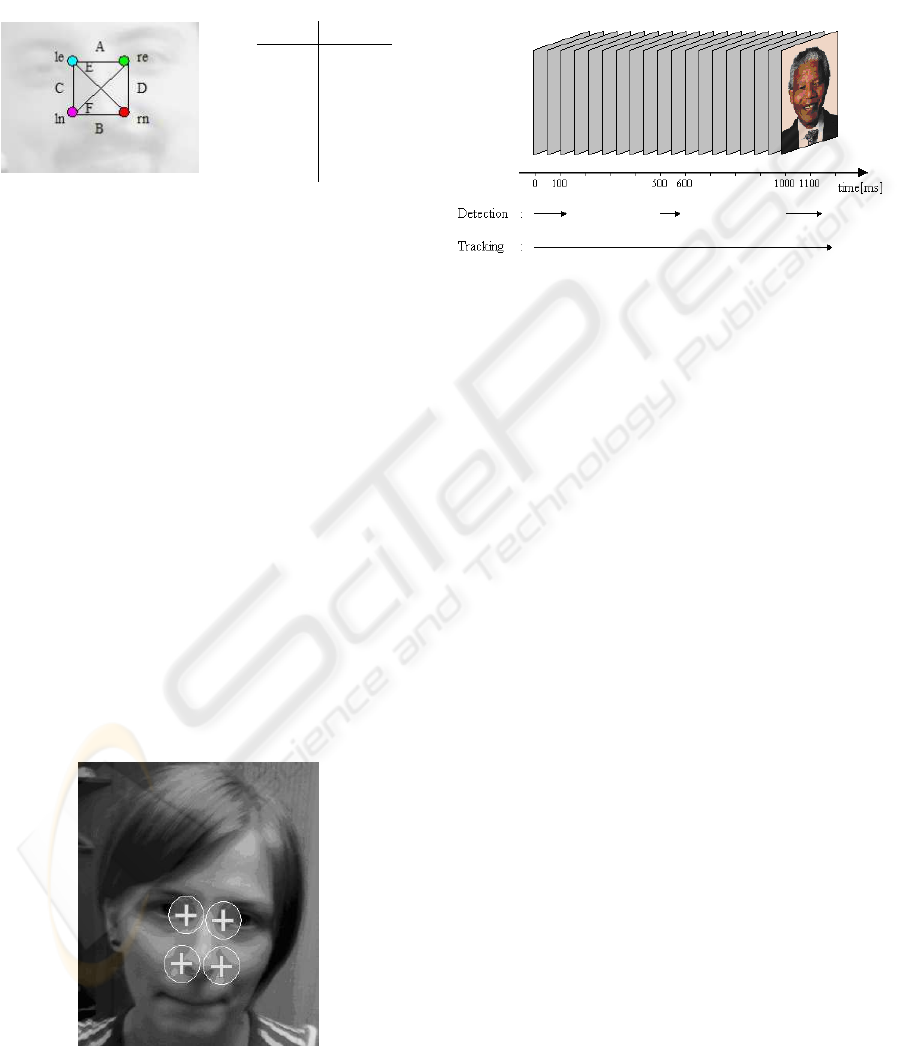
2.3 Post-processing: Graph Matching
Let fiducial facial points be depicted according the no-
tation from the Fig. 5. All detected fiducial points
to be preserved must pass, for at least one scale,
through the graph matching procedure with the fol-
lowing pseudocode.
forall left eyes le do
forall right eyes re do
if distance(le.Y,re.Y)<15*scale
and 30*scale>(re.X-le.X)>20*scale
forall left nostrils ln do
if distance(le.X,ln.X)<30*scale
and 35*scale>(ln.Y-le.Y)>20*scale
forall right nostrils rn do
if distance(re.X,rn.X)<30*scale
and 35*scale>(rn.Y-re.Y)>20*scale
set distance(le,re):=norm;
normalize other distances:
distancen:=distance/norm;
get total_distance as the sum of distances
between actual graph and reference graph;
if total_distance<threshold
consider points as detected face;
endfor
endfor
endfor
endfor
This pseudocode could be shortly explained by the
statement, that we look for the left eye corner to the
left from the right eye corner, the nose corner at the
FACE DETECTION AND TRACKING IN DYNAMIC BACKGROUND OF STREET
417
bottom of eyes and so on. All the points that fulfill
these constraints are then normalized by the distance
of the eye corners, and then compared to the reference
graph. If the Euclidean distance of both graphs is be-
low specified threshold, points are considered as face
features.
edge
length
A 1.00
B
1.05
C
0.99
D
0.98
E
1.41
F
1.43
Figure 5: Fiducial points and their symbols used in graph
matching algorithm: le - left eye, re - right eye, ln - left
nostril, rn - right nostrils corners.
Reference graph is trained by averaging normal-
ized distances in the set of many faces. It is interesting
that these distances between fiducial points indicate
their displacement in the corners of a square.
2.4 Face Tracking
Because of face detection takes larger amount of time
(about 80 ms for CIF image, depending on number
of detected edges) it cannot be directly used in real
time applications. To achieve detection at about 25
frames per second a tracking algorithm has been pro-
posed. Instead of continuous detecting facial features,
we can run face detection once per larger period of
time (ie. one second), and in the meantime search
for facial features only in the closest neighborhood of
points already found, as shown in Fig. 6. Tracking
is identical as detection, but because of much smaller
search region and known face scale, it is much faster.
Figure 6: Search areas for tracking of two nose and two eyes
inner corners.
In our final implementation there are two coex-
isting threads shown in Fig. 7. Detection thread is
responsible for detection of the new faces in the im-
age. Tracking algorithm can discard and modify pre-
viously found fiducial points. It also has an option to
find eyes centers in the middle of both eye corners.
Figure 7: Detection and tracking threads.
3 EXPERIMENTAL RESULTS
All experiments have been performed in Visual C++
environment, running on 64bit Athlon 3500+ proces-
sor. ROC for individual base points (inner eyes cor-
ners and nose corners) have been made for Mpeg,
Banca and BioID database and presented in Fig. 8. As
we mentioned before these features are next applied
to reference graph and false acceptance and false re-
jection rates of the final detector are much lower than
in separate facial points detectors.
We have tested detection algorithm for face recog-
nition by Linear Discriminant Analysis (Skarbek
et al., 2004) and Dual Linear Discriminant Analysis
(Kucharski, 2006). Database contained nearly frontal
pictures of three databases:
• Mpeg (3175 pictures, 635 people),
• AltKom (1200 pictures, 80 people),
• Yale (165 pictures, 15 people).
One test was performed on manually, and the sec-
ond on automatically selected eyes centers. Result of
such analysis is presented in Fig. 9. Image ROC was
created for face recognition based on single image. In
person ROC, for every recognition, a set of pictures
have been taken. Equal error rate pointed in figures
determines threshold at which false acceptance and
false rejection rate becomes equal.
We have also verified the algorithm in various en-
vironments that simulate real cash machine condi-
tions. It appears, that DGJ algorithm has almost per-
fect false acceptance rate while achieving very good
SIGMAP 2007 - International Conference on Signal Processing and Multimedia Applications
418
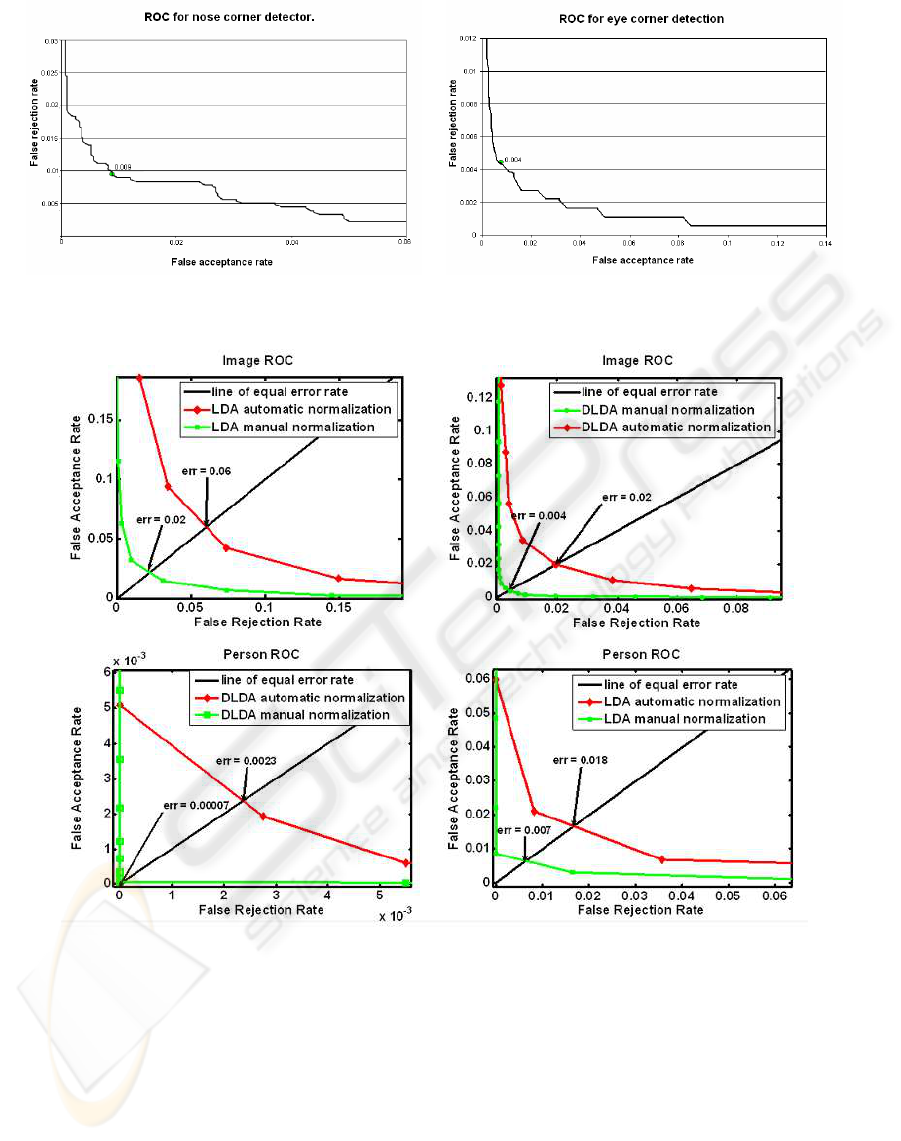
Figure 8: ROC for eye and nose corner detectors.
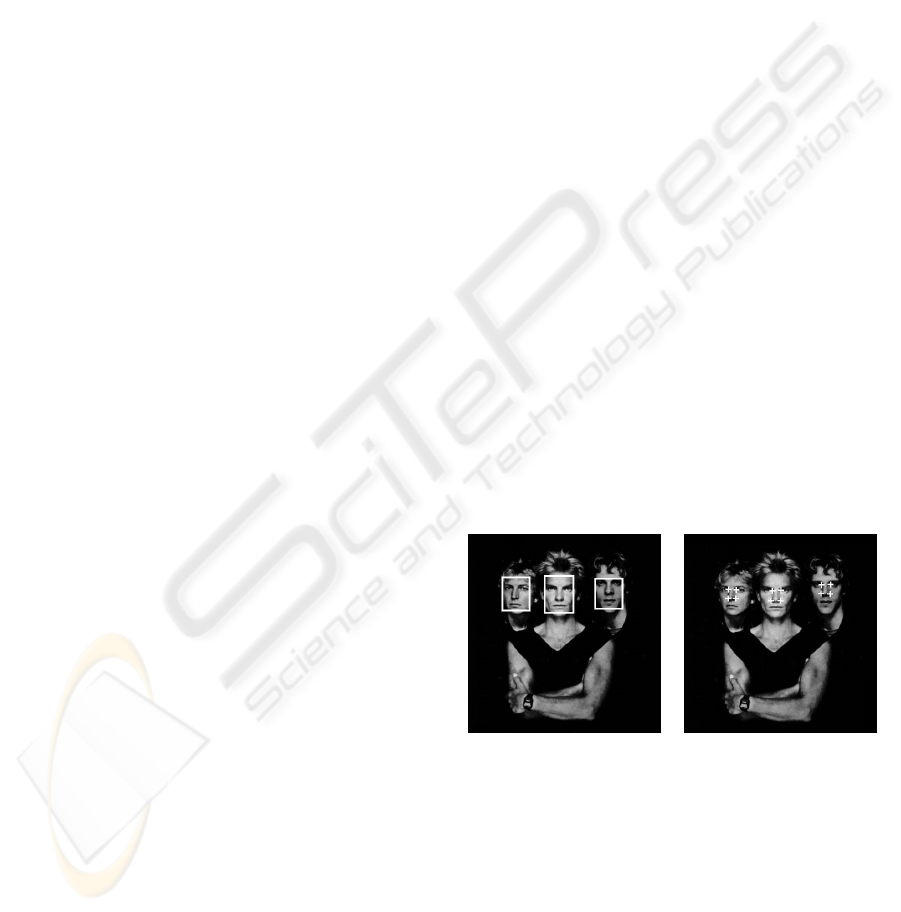
Figure 9: Recognition results for manual and automatic eye center detection.
detection results. However, usually faces that weren’t
frontal or near frontal have been missed. Also very
dark conditions sometimes caused errors. Some of the
results are shown in Fig. 10. Detector itself, for CIF
resolution, achieves up to 13 frames per second, but
in combination with tracking - 25 frames per second.
4 CONLUSIONS
The paper presents a novel face detection and track-
ing algorithm which could be part of human-machine
interaction in applications such as intelligent cash ma-
chine. The facial feature extraction algorithm is based
on discrete approximation of Gabor Transform, called
Discrete Gabor Jets (DGJ), evaluated in edge points.
DGJ is computed using integral image for fast sum-
mations in arbitrary windows and by FFT operations
FACE DETECTION AND TRACKING IN DYNAMIC BACKGROUND OF STREET
419

Figure 10: Detection results for manual (upper row) and
automatic eye center detection (lower row).
on short contrast signals. Contrasting is performed
along radial directions while frequency analysis along
angular directions. Fourier coefficients for a small
number of rings create a feature vector which is next
reduced to few LDA components and then compared
to the reference facial feature vector. Detected eyes
and nose corners are chosen to fit reference face by
spatial relationships. Tracking is based on the same
rule, but the corners are searched only within already
detected facial features neighborhood. Optionally for
face normalization eyes centers are found as centers
of outer and inner eye corners. Comparison of man-
ual and automatic eye center detection shows still sig-
nificant advantage of manual approach, measured in
terms of accuracy in face recognition by Linear Dis-
criminant Analysis (LDA) and Dual Linear Discrimi-
nant Analysis (DLDA) algorithms.
ACKNOWLEDGEMENTS
The work presented was developed within VIS-
NET 2, a European Network of Excellence
(http://www.visnet-noe.org), funded under the
European Commission IST FP6 Programme.
REFERENCES
Beumer, G., Tao, Q., Bazen, A., and Veldhuis, R. N. J.
(2006). A landmark paper in face recognition. In FGR
’06: Proceedings of the 7th International Conference
on Automatic Face and Gesture Recognition (FGR06),
pages 73–78. IEEE Computer Society.
Fisher, R. A. (1936). The use of multiple measurements in
taxonomic problems. Annals of Eugenics, 7:179–188.
Freund, Y. and Schapire, R. E. (1997). A decision theoretic
generalization of on-line learning and an application
to boosting. Journal of Computer and Systems Sci-
ences, 55(1):119–139.
Fukunaga, K. (1992). Introduction to Statistical Pattern
Recognition. Academic Press.
Gabor, D. (1946). Theory of communication. Proc. of IEE,
93(26):429–441.
Golub, G. and Loan, C. (1989). Matrix Computations. The
Johns Hopkins University Press.
Jones, M. and Viola, P. (2003). Face recognition using
boosted local features. Technical Report TR20003-25,
Mitsubishi Electric Research Laboratories.
Kucharski, K. (2006). Face Indexing by Image Components
Method. PhD thesis, Warsaw University of Technol-
ogy.
MPEG-7, editor (2004). Multimedia content description in-
terface. Visual Descriptor Extensions., volume 15938-
3:2002/Amd.1:2004. ISO/IEC.
Shapire, R. E. (2002). The boosting approach to machine
learning – an overview. In MSRI Workshop on Non-
linear Estimation and Classification.
Skarbek, W., Kucharski, K., and Bober, M. (2004). Dual
lda for face recognition. Fundamenta Informaticae,
61:303–334.
Viola, P. and Jones, M. (2001). Robust real-time object
detection. Second Int’l Workshop on Statistical and
Computational Theories of Vision – Modeling, Learn-
ing, Computing and Sampling.
Yang, M. H., Kriegman, D. J., and Ahuja, N. (2002). De-
tecting faces in images: A survey. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
24(1):34–58.
SIGMAP 2007 - International Conference on Signal Processing and Multimedia Applications
420
