
ARCHITECTURAL DESIGN VIA DECLARATIVE PROGRAMMING
Lu
´
ıs Moniz Pereira and Ruben Duarte Viegas
Faculdade de Ci
ˆ
encias e Tecnologia, Universidade Nova de Lisboa, Monte da Caparica, Portugal
Keywords:
Architectural design, declarative design support system, solution generation by constraint solving, logic pro-
gramming for design.
Abstract:
Problem solving by declarative theory building can be an extremely effective method for porting concepts and
knowledge from the problem domain to the solution do main, by allowing the implementation of complete
procedural constructs and enabling to produce sound solutions. If conveniently expressed, such a theory
may be directly coded into a declarative programming language. If expressed within the paradigm of logic
programming, then the theory itself represen ts the very procedure to obtain its desired solutions.
The illustrative case study considered here is the obtention of architectural layouts from an adjacency graph:
Given a list of imposed adjacencies among a set of planar rectangular spaces (represented by the graph’s
nodes), the goal is to generate all permissible layouts schemas on the plane which respect the adjacencies, and
to determine the minimal modular dimensions of such a set of spaces.
Another aim of this article is also to show the guidelines of an effective translation of the theory constructed
to solve the proposed problem in Logic Programming, making use of the combined power of two different
semantics and their implementations, namely the Well Founded Semantics and the Stable Models one.
1 INTRODUCTION
In the architectural domain, the problem of specifying
a set of possible architectural layouts for construction
purposes is of critical importance. The constraints in-
volved in such a specification are often complex and
interleaved, involving matters of topology such as the
required or impossible adjacencies in a set of layout
plant spaces and matters of dimension regarding the
size of each space in order to minimize construction
material or to maximize space within the building’s
architectural skeleton. Additional constraints apply
to the overall shape of the layouts’ contours.
The problem considered here approaches these is-
sues and promotes automatic methods for the gener-
ation of valid alternative layouts given such sets of
constraints. In this case, a necessary adjacencies list
is initially given, specifying constraints on the topol-
ogy of the modular layout spaces.
A method of building a requirements theory to
solve the general problem was first elaborated and
presented in (Pereira, 1974; Pereira, 1978) and, as
such, the main concern here is to provide an efficient
translation into a logic program of that theory. This
is accomplished in what regards the determination of
the permissible hv-assignments constraints to edges
(i.e. the assignment of the horizontal or vertical la-
bels to each adjacency edge to signal the relative po-
sition of the corresponding separating wall between
its two adjacent spaces; and, also, in what regards the
determination of the minimal compatible modular di-
mensions for each space; and, finally, in what regards
the drawing of the associated layout scheme).For an
example, see Fig 1 below.
The problem offers today the same challenge it
did three decades ago, when Algol68 language was
the programming vehicle. It is generally highly and
elaborately constrained, with each constraint very dif-
ficult to implement or even approach, since some of
the concepts related to the architectural background
are relatively complex. Furthermore, given the over-
all complexity of the problem, it is quite difficult to
363
Moniz Pereira L. and Duarte Viegas R. (2007).
ARCHITECTURAL DESIGN VIA DECLARATIVE PROGRAMMING.
In Proceedings of the Ninth International Conference on Enterprise Information Systems - AIDSS, pages 363-369
DOI: 10.5220/0002346503630369
Copyright
c
SciTePress
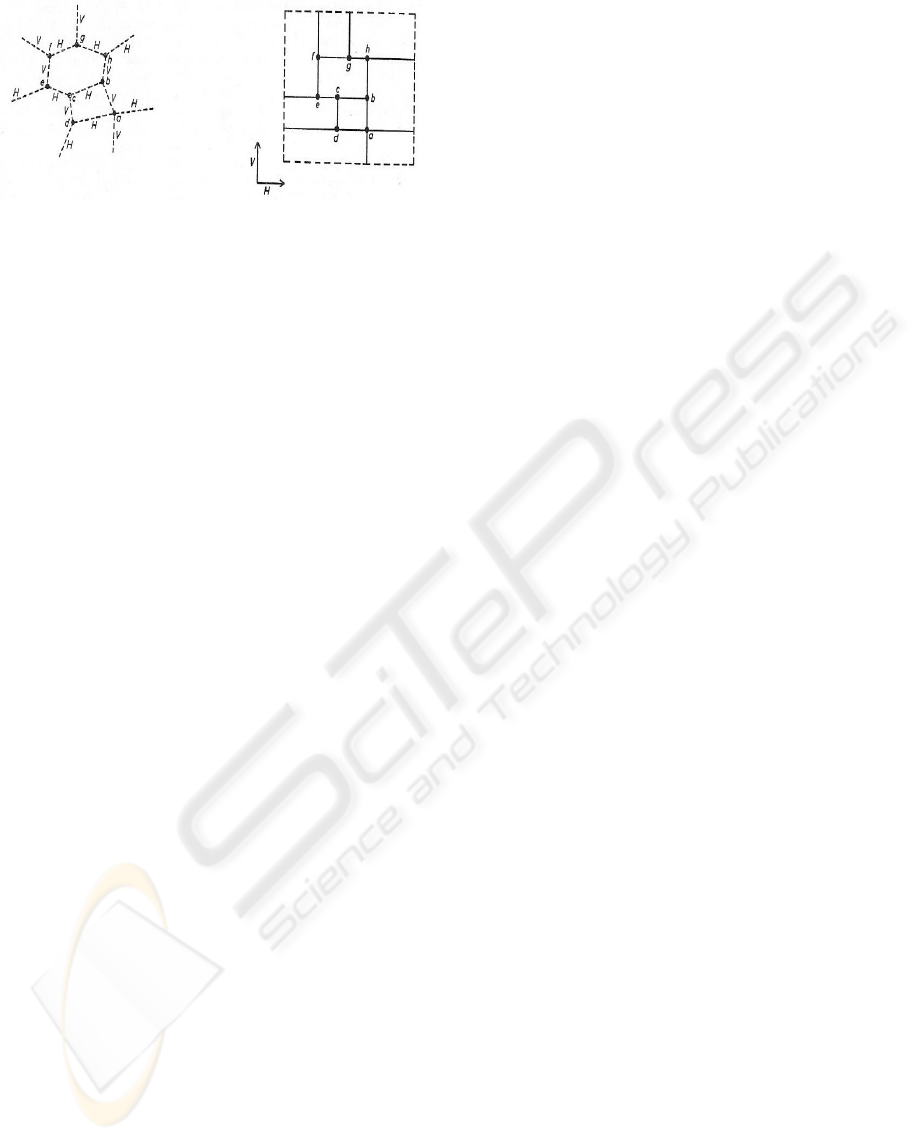
Figure 1: A labelled graph and its associated layout.
produce a declarative implementation solution with
classical programming languages.
However, approximately thirty years after, we
have available today more and better (declarative)
tools and resources and in particular logical and pro-
cedural mechanisms to more easily develop such an
implementation. For a single comparison, the solu-
tion defined in (Pereira, 1974) was indeed completely
implemented in Algol68, having the author even to
implement his own backtracking mechanism at a high
level. Since then, possibly many solutions were im-
plemented in various other languages, but here we
are proposing a solution based not in one but in two
distinct logic programming frameworks and their im-
plementations (XSB-Prolog and Smodels) aiming at a
cooperative chore division that makes use of the better
strengths of each.
Additionally, since the appearance of the Stable
Models Semantics few significantly pre-existing com-
plex problems have been considered that can effec-
tively test its strengths and weaknesses. The present
pre-existing combinatorial problem is perfect for that
testing. It is sufficiently complex in some of its sub-
problems, thereby allowing the latter semantics to
be tested thoroughly and hence stress its strengths,
and in other of its subproblems too complex or even
too unfeasible to even apply that semantics, resort-
ing then to XSB-Prolog and its Well-Founded Seman-
tics and therefore stressing the former’s weaknesses.
And vice-versa, exchanging the roles of the two se-
mantics. The use of the Stable Models Semantics
was enacted through the XASP interface included in
XSB-Prolog. The interface syntax can be consulted
in (XASP, 2005). More detailed information will be
provided in subsequent sections regarding subprob-
lem solving, namely where each of the semantics is
called for.
In the next section detailed information will be
provided about the problem statement, including hy-
potheses definition, problem decomposition, and im-
plementation details. There follow, in subsequent
sections, a concise analysis regarding both semantics
and, in the last section, we set forth closing remarks
and future enhancements about the application herein
reported.
2 PROBLEM FORMULATION
AND DECOMPOSITION
The initial problem formulation is defined by the
original definitional hypotheses presented in (Pereira,
1974), recapped in (Pereira, 1978). Below are those
covered by the current implementation relative to sub-
problem 1.4 defined in (Pereira, 1974; Pereira, 1978),
which establishes the conditions under which a pla-
nar rendering of the adjacency graph gives at least one
permissible hv-assignment:
• Conditions A [These we presuppose]
1. The adjacency graph is finite, simple, con-
nected, non-separable, and planar.
2. Every interior node of the adjacency graph has
four or more edges.
3. Every face of the adjacency graph must be tri-
angular or rectangular.
• Conditions B [These we wish to satisfy non-
deterministically]
1. Each edge must be labelled or ”coloured” ei-
ther with ’v’ or ’h’, an hv-assignment being a
complete labelling of the graph.
2. No triangular face can have all its edges as-
signed the same colour.
3. All rectangular faces must have opposite edges
assigned the same colour, and non-opposite
ones assigned different colours.
4. The edges around an interior node must be
coloured in such a way that they may be
grouped into four successive alternating colour
groups.
The implementation approach was decomposed
into the following subproblems and attending em-
ployed technology:
1. To determine the set of faces formed by the adja-
cency graph (XSB-Prolog).
• Define triangle as a set of 3 pairwise adjacent
nodes
• Define square as a sequence of 4 nodes where
each each node is adjacent only to its predeces-
sor and its sucessor
• Define a shape starting at a given node as a tri-
angular or square face having that node as a ver-
tex.
ICEIS 2007 - International Conference on Enterprise Information Systems
364

• Obtain all the shapes, starting from a given
node as the set of all faces having that node as
a vertex.
2. To determine the labelled hv-graph given the set
of faces (Smodels).
• Define color as being an ’h’ or a ’v’.
• Define arc as a directed adjacency.
• Define a coloured arc as an arc with a assigned
color.
• There can be no stable model where an arc has
more than one labelling.
• There can be no stable model where both arcs
that define an adjacency have different labels.
• There can be no stable model where every arc
that constitutes a triangle have been coloured in
the same way.
• There can be no stable model where opposite
arcs constituting a square are coloured in the
same way.
3. To determine the two, horizontal and vertical,
space partitions given the hv-graph (XSB-Prolog).
• Orient each label given a permissible hv-
assignment as mentioned in (Pereira, 1974),
Chapter 6, Section 2 and in (Pereira, 1978),
namely, every edge in the same colour group
of any node must be directed in the same sense
and opposite groups must have their edges op-
positely directed with respect to the node.
• Obtain the set of paths from every initial or
source node to each terminal or sink node.
4. To determine the minimal modular dimensions for
each space given the partitions (XSB-Prolog).
• A node’s minimal X dimension is the number
of its occurrences in the vertical partition.
• Similarly, a node’s minimal Y dimension is the
number of its occurrences in the horizontal par-
tition.
5. To determine the coordinates positioning each
space. (XSB-Prolog)
• Implement both contour recognition automata
proposed in (Pereira, 1974), Chapter 6, Section
2 and (Pereira, 1978).
• The first automaton tries to determine the coor-
dinates of the external divisions, thus giving a
boundary for the interior nodes.
• The second automaton starts with any unpro-
cessed node adjacent to at least one of the pre-
viously processed nodes and computes the co-
ordinates of the next division and the next di-
rection.
Figure 2: a) Adjacency graph. b) Coloured Adjacency
graph.
• So, first determine the coordinates for all exte-
rior nodes thus obtaining an external skeleton
for the layout.
• And secondly, having the external skeleton de-
termine the coordinates for the interior nodes.
6. To draw the final layout (XSB-Prolog).
• Generate an empty matrix given all dimensions.
• Sweep each line, filling each cell with the cor-
responding space figuring at that coordinate.
The solution is almost entirely based on that pro-
posed in (Pereira, 1974), complemented with a few
enhancements for integration of two distinct types of
semantics, the Well-Founded Semantics (WFS) and
the Stable Models (SM) one.
As an example consider the adjacency graph ex-
hibited in Fig.2a, regarding the topology of 14 spaces
where the graph is compliant with Conditions A from
the start.
From the graph one can easily obtain all the faces
where a given node appears. For instance, taking node
10 as the starting node we can obtain 5 faces, namely a
triangle formed together with nodes 1 and 9, a triangle
formed together with nodes 1 and 2, a third triangle
formed together with nodes 2 and 3, a square formed
together with nodes 9, 8 and 11, and finally another
square formed together with nodes 3, 4, and 11.
Having the faces where every node appears, one
can now label each edge in the graph with either an
’h’ or a ’v’, so long as the restrictions presented in
Conditions B are verified. One colouring for the ad-
jacency graph presented is depicted in Fig.2b.
Having the hv-graph, we proceed to determine
the horizontal and vertical partitions of the graph.
The horizontal partition can be obtained by consid-
ering a subgraph of the hv-graph whose edges are just
those labelled with ’v’; similarly the vertical partition
can be obtained considering only those edges labelled
with ’h’.
Given the colouring depicted in Fig.2b, the hor-
izontal partition of the hv-graph with a possible de-
fined direction for each edge is consummated in
ARCHITECTURAL DESIGN VIA DECLARATIVE PROGRAMMING
365

Figure 3: a) Horizontal partition graph. b) Vertical partition
graph.
Fig.3a. Similarly, the vertical partition is depicted in
Fig.3b.
Given the horizontal and vertical partitions of the
hv-graph, we now determine the set of paths from ev-
ery initial node to every terminal node in each parti-
tion, with arbitrary directions. Starting with the hor-
izontal partition, the table of columns, i.e, the set of
all paths is (each path is represented as a column) is
on the left; for the vertical partition, the table of rows,
i.e, the set of all paths is (each path is represented as
a row) is on the right:
1 1 2 2 3 1 2 3
9 9 10 10 4 1 10 3
8 8 11 11 5 9 10 3
7 12 13 13 8 11 4
14 14 5 7 12 13 4
6 6 7 14 5
7 6 5
For the subproblem of determining the minimal
modular dimensions of each space it suffices to count
the occurrences of each division in the table of
columns thus determining their minimal X-coordinate
dimension and, similarly, counting its occurrences
in the table of rows to determine the minimal Y-
coordinate dimension.
Table 1 shows the minimal modular dimensions
for each division for the example under consideration.
At this point, there just remain to be determined
the coordinates of the spaces. As mentioned earlier,
the exterior nodes’ coordinates are computed first,
thus obtaining the external skeleton of the layout, and
only then the interior nodes’ coordinates are calcu-
lated, as all their hv-graph ancestor’s coordinates have
been calculated.
To obtain the final layout it suffices to build the
matrix whose dimensions can be calculated with each
node’s coordinates and minimal modular dimensions,
and then to put each division in the matrix.
Fig.4 depicts one of the layouts obtained from the
initial adjacency graph with a 90 degree symmetric
turn of the permissible hv-assignment that was pre-
Table 1: Minimal modular dimensions.
Space X dimension Y dimension
1 2 2
2 2 1
3 1 3
4 1 2
5 2 2
6 2 1
7 1 3
8 2 1
9 2 1
10 2 2
11 2 1
12 1 1
13 2 1
14 2 1
Figure 4: Layout.
sented in this section. Other examples are presented
in Figs. 5 and 6.
In the next sections an overview of each logic pro-
gram semantics’ implementation adequateness is ex-
amined.
3 WELL-FOUNDED SEMANTICS
TABLED DERIVATION -
XSB–PROLOG
The XSB–Prolog system implements the Well-
Founded Semantics (WFS) (Gelder et al., 1991) par-
tially by means of a tabled loop detection and de-
laying mechanism. The loops in the program are
then solved with the undefined truth-value — just
like WFS does. Taking advantage of the underlying
WFS implementation, the XSB–Prolog system can be
safely used for top-down query solving with no risk
of falling into a endless loop like a normal Prolog
Figure 5: Another layout for the same graph.
ICEIS 2007 - International Conference on Enterprise Information Systems
366

Figure 6: Non-rectangular layout (with black external
space) still for the same graph.
implementation would. The default negation of the
Well-Founded Semantics is the more adequate one to
express most of the constraints regarding the permis-
sible layout schemes in this problem. For example,
the two alternative edge colourings of each edge are
expressed by means of a length 2 even loop over de-
fault negation, and WFS is able to cope with them.
Indeed, we rely on XSB–Prolog to compute the resid-
ual or kernel program of a query, and on Smodels to
compute the Stable Models of this kernel. The XSB–
Prolog XASP interface — as it is known — provides
an ASP interface which permits the programmer to
call on the Smodels implementation. In summary, the
XASP side of the implementation top-down finds ex-
actly just those default negation literals involved in
loops which are relevant for the query, and then the
Smodels part takes such even loops remaining to be
solved, plus any integrity constraints, and returns their
solutions, i.e. their Stable Models, back to XASP for
integration into answers to the query.
Top-down querying, in general, can improve the
level of groundness of the residual program pertaining
to a query. It thus avoids some of the complications
that full groundness, required of the whole program
and not just the residual part with respect to the query,
begets for problem representation when just Stable
Models implementations are used. Because it can do
without full groundness of the whole program, pro-
gramming with meta-interpreters becomes a usable
tool, that enlarges the degree of freedom in represent-
ing and solving problems, compared with the Stable
Models implementations.
However, it is also true that the definition of many
of the more complex concepts in the theory ended
up being expressed with several procedural consid-
erations in mind, for efficiency reasons. Pure logical
declarativeness is not always desirable for that reason,
and this shortcoming is clearly expressed by some of
the more complex parts of the developed program.
The main advantage of a tabulated implementa-
tion of WFS is the computational efficiency of the
derivation algorithm, which is polynomial. Well-
established implementations, like XSB–Prolog, can
interact with several other logic programming tools
and external applications, and provide adequate con-
structs to allow for a flexible user interface, in addi-
tion to debugging tools.
Our program is almost entirely based on XSB–
Prolog, in part because some of the subproblems can
easily be implemented with the WFS semantics, or
the SLDNF (negation by failure) semantics, which is
also available in XSB–Prolog. For other subproblems
Smodels is the perfect choice; then the XSB–Prolog
side prepares all the data to be sent to Smodels, by
building the residual program, sending it to Smodels,
obtaining the results back and interpreting them.
4 ANSWER SET SEMANTICS -
SMODELS
The answer set semantics is a popular choice in the
logic programming community, that allows for im-
proved ways to declaratively express problem solving
theories, and a method to compute their correct solu-
tions.
Logical expressiveness is greatly enhanced by the
introduction of explicit negation and a more intuitive
way to express problem related constraints and to gen-
erate all possible models for a given theory. The sub-
problem related with the determination of permissi-
ble hv-assignments, for instance, is easily expressed
in the answer set semantics, without much complex-
ity in the development of the program.
There are some main disadvantages however, that
constitute the major drawbacks of the answer set se-
mantics approach. The first one, related to the non-
relevancy property, is the computational complexity
of the model derivation, which belongs to the NP-
complete class of problems. As such, its implemen-
tations have an exponential temporal complexity to
compute all the answer sets.
Secondly, Stable Models in non-cumulative, thus
being unable to make use of already known sets of
literals, something that could easily be used for the
instance of the problem at hand.
The third disadvantage refers to the way all its im-
plementations, like Smodels, treat a program. The
stable models (and answer sets) semantics considers
the whole Herbrand base of a logic theory i.e., it only
works with fully instantiated rules. Before compu-
tation of the stable models begins, it is necessary for
the implementation to combine the substitutions of all
variables in a rule, with respect to all possible ground
instance values of each one.
As a consequence of some of the previous dis-
advantages, Smodels cannot make use of known de-
terministic properties of our layout theory. For in-
stance, while XSB-Prolog, enhanced with a deter-
ARCHITECTURAL DESIGN VIA DECLARATIVE PROGRAMMING
367

ministic priority meta-interpreter mechanism (like the
one defined in (Pereira et al., 1992)), can, without
grounding, identify each deterministic call in turn,
and therefore produce an evaluation in polynomial
time without recourse to backtracking, Smodels in-
stead is forced to ground every variable in the pro-
gram, having even to resort to each variable’s domain
to do so. Meta-interpretation allows guiding an eval-
uation without the spacial multiplication of the pro-
gramme, and without analyzing each variable’s do-
main, a priceless feature when integrated into XSB-
Prolog.
It is also not possible to define dynamic constructs
during computation, which greatly limits expression
of certain aspects of the theory. These limitations
were deeply felt during development of this imple-
mentation and greatly conditioned the use of this se-
mantics throughout.
These disadvantages had a direct impact in the
process of choosing the tool in which to implement
each of the referred subproblems or, more appropri-
ately, in preferring XSB–Prolog over SModels, even
for the combinatorial ones. For instance, the dynamic
construct definition disadvantage is patent in subprob-
lem 1, in the problem of determining the horizontal
and vertical partitions of the hv-graph, and in deter-
mining the minimal modular dimensions of each di-
vision, simply because it cannot be known a priori the
exact number of elements we are referring to, and,
even if they were known, it would probably be very
difficult to code anyway. On top of that, the derivation
algorithm can transform a polynomial problem into
an exponential one, as exemplified by subproblem 5
related to the determination of the coordinates of the
external skeleton of the layout, which can be solved
in polynomial time and, if translated into SModels,
would turn exponential.
5 CLOSING REMARKS AND
FUTURE WORK
The implementation presented in this article corre-
sponds only to a limited subset of the rather com-
plete theory presented in (Pereira, 1974). As men-
tioned earlier, only the planar topological aspect of
the problem-solving theory was considered, i.e. a
planar rendering of the graph was assumed. The ex-
tensions required to restrain the dimensions of each
space and each adjacency to specified intervals were
clearly out of scope of this work, but they are unavoid-
able in order to obtain a practical and general usable
solution to the problem.
Only one of the subproblems mentioned was im-
plemented in Smodels; however, also the subprob-
lem related to determining the orientation of the la-
bels could be implemented in it. This subproblem, as
implemented in XSB–Prolog, is one of the most com-
plex parts of the program and, if it were implemented
in Smodels, the relevant part of the code would be
much more concise, logical and substantially reduced
in size and complexity. Unfortunately, because of the
disadvantages mentioned, we found the time com-
plexity of the obtained code substantially increased,
as did the number of layouts obtained, but unneces-
sarily since the new solutions are just symmetrical
variations! For example, given a triangular adjacency
graph, the distinct number of solutions (modulo sym-
metry) is 6 in the current implementation, but would
turn to 24 if developed in Smodels, with no really new
solutions.
A possible solution for this problem is in the uti-
lization not of the usual Stable Models Semantics but
of a revised one, which enjoys relevancy and cumula-
tivity, as mentioned and defined in (Pereira and Pinto,
2005a) and (Pereira and Pinto, 2005b), which are
properties required for an efficient and more declar-
ative implementation for the instance at hand.
Regarding the generalization of the problem in-
stance tackled, future work includes dynamically ob-
taining alternative planar representations of an adja-
cency graph, albeit from an initially non-planar one,
respecting some constraints, and so allowing for a
more flexible interface with a human user, who does
not have to produce a planar representation; addition
of range intervals for each dimension, thereby restrict-
ing the possible values associated with each space and
taking a significant step towards real requisites; al-
lowing dimensional range overlap of spaces in order
to view and detect problematic design points; intro-
duction of layout restrictions guaranteeing elimina-
tion of unwanted layouts; interconnection with Auto-
CAD, thus enabling a more formal presentation of the
layouts, which are currently represented in HTML.
This application is a perfect example of the ben-
efits of a joint collaboration of the Well Founded Se-
mantics and the Stable Models Semantics aiming at
theory building for problem solving.
Having implemented the solution in this hybrid
way we can thus gain more declarativeness by rele-
gating every task to the system where we can more
easily programme it and, also obtaining a much more
efficient solution by relegating each task to the system
that more easily solves it.
Future research in this double approach can un-
doubtedly provide a more declarative, simple and
logical approach to problems on the basis of Logic
Programming. Some major steps have already been
ICEIS 2007 - International Conference on Enterprise Information Systems
368

taken towards that direction, namely the revised Sta-
ble Models Semantics presented in (Pereira and Pinto,
2005a) and (Pereira and Pinto, 2005b), as it is be-
lieved that enhancements to the Stable Models se-
mantics can bring major improvements to the field of
Logic Programming.
ACKNOWLEDGEMENTS
We thank Andr
´
e Costa, Gonc¸alo Lopes and Alexandre
Constantino for their help.
REFERENCES
Gelder, A. V., Ross, K. A., and Schlipf, J. S. (1991). The
well-founded semantics for general logic programs.
Journal of the ACM, 38(3):620–650.
Pereira, L. M. (1974). Layout Schemes From Adjacency
Graphs — a case study in problem solving by the-
ory building. PhD thesis, Brunel University UK, pub-
lished by Laborat
´
orio Nacional de Engenharia Civil
(LNEC) Lisbon.
Pereira, L. M. (1978). Artificial intelligence techniques in
automatic layout design. In Artificial Intelligence and
Pattern Recognition in Computer Aided Design, pages
159–173. North-Holland.
Pereira, L. M., Alferes, J. J., and Dam
´
asio, C. (1992). The
sidetracking meta-principle. Simp
´
osio Brasileiro de
Intelig
ˆ
encia Artificial, pages 229–242.
Pereira, L. M. and Pinto, A. (2005a). Implementing the re-
vised stable models — an ASP-based approach. Sub-
mitted to Annals of Mathematics and Artificial Intelli-
gence.
Pereira, L. M. and Pinto, A. M. (2005b). Revised stable
models — a semantics for logic programs. In Progress
in Artificial Intelligence — Procs. 12th Portuguese
Intl. Conf. on Artificial Intelligence (EPIA’05), LNAI
3808, pages 29–42. Springer.
XASP (2005). XASP: Answer set programming with XSB-
Prolog. http://xsb.sourceforge.net/packages/xasp.pdf.
ARCHITECTURAL DESIGN VIA DECLARATIVE PROGRAMMING
369
