
INVESTIGATIONS ON OBJECT-CENTERED ROUTING IN
DYNAMIC ENVIRONMENTS: ALGORITHMIC FRAMEWORK AND
INITIAL NUMERICAL RESULTS
Support for Distributed Decision Making in Transport Systems
Bernd-Ludwig Wenning, Carmelita G
¨
org, Andreas Timm-Giel
Communication Networks, University of Bremen, Otto-Hahn-Allee, D-28359 Bremen, Germany
J
¨
orn Sch
¨
onberger, Herbert Kopfer
Chair of Logistics, University of Bremen, Wilhelm-Herbst-Straße 5, 28359 Bremen, Germany
Keywords:
Autonomous decision making, transport planning, route request / route reply, dynamic decision problem,
stochastic problem data.
Abstract:
Dynamics in logistics are a subject of increasing importance in logistic processes. The more detailed dy-
namics are considered, the more complicated it becomes to handle them in centralized planning. Therefore,
decentralized approaches with autonomous cooperating entities might become more efficient.
This paper introduces some aspects of decentralized approaches, mainly focusing on the process of information
acquisition which enables the autonomous entities to decide about the handling of routes and orders.
1 INTRODUCTION
The consideration of so-called
dynamics
which are
process relevant up-to-date and so far not known in-
formation appearing consecutively and unpredictably
with ongoing time, is of increasing importance for the
management of transport processes in today’s logistic
systems.
Two aspects of dynamics are recognized. At first,
transport networks are formed temporarily and by in-
dependent parties each providing an own subnetwork.
A centralized knowledge about the complete network
is typically not available. Secondly, a very huge
amount of up to date information that is exploited
in the management of the transport processes requir-
ing frequent process updates and adaptations in order
to keep the transport quality on a maximum efficient
level.
The application of centralized planning ap-
proaches is impossible. Decision support systems
have to be able to support an object-centered plan-
ning, in which several autonomous objects have to be
coordinated instead of determining the exact process
for each vehicle.
In Section 2, an example of such a scenario is
introduced. Section 3 is about the configuration
of generic algorithmic support for the decentralized
routing and the proposed decision support is assessed
within a simulation study in Section 4.
2 CHALLENGE OUTLINE
This section is dedicated to the outline of the decision
situation we are dealing with. Subsection 2.1 provides
a short survey about the relevant streams in the scien-
tific literature. The investigated network is introduced
in Subsection 2.2. An explicit scenario is shown in
Subsection 2.3.
2.1 Literature
Two general approaches for coping with dynamics in
routing have been discussed in the scientific literature.
In
a-priori optimization
a set of a-priori-paths is
determined in advance that visits all possible cus-
tomer sites (Powell et al., 1995). The a-priori-paths
have the least expected costs among all possible
paths. If determining the paths, probability distribu-
tions about the need for visiting a particular customer
site are exploited. The a-priori-routes are then up-
dated and adapted to the real need, e.g. if it turns
225
Wenning B., Görg C., Timm-Giel A., Schönberger J. and Kopfer H. (2007).
INVESTIGATIONS ON OBJECT-CENTERED ROUTING IN DYNAMIC ENVIRONMENTS: ALGORITHMIC FRAMEWORK AND INITIAL NUMERICAL
RESULTS - Support for Distributed Decision Making in Transport Systems.
In Proceedings of the Ninth International Conference on Enterprise Information Systems - AIDSS, pages 225-230
DOI: 10.5220/0002379502250230
Copyright
c
SciTePress

out that a customer site does not need to be visited, it
might be skipped from the a-priori-route but the vis-
iting order of the remaining requests is not subject to
alternation. A-priori-optimization-based approaches
require the knowledge about a suitable probability
distribution.
In
reactive routing
approaches, only known prob-
lem data about customer sites and the network struc-
ture are considered during the generation of routes.
After an event has been detected that corrupts the re-
alization of the so far followed routes, a new route
generation is carried out. Route-update times are de-
termined in advance in
rolling horizon planning
(Bi-
tran and Tirupati, 1993), but in
online planning
(Irani
et al., 2004; Fiat and Woeginger, 1998), a new plan-
ning is executed every time a new event appears that
contradicts the execution of the so far valid routes.
(Langer et al., 2007) investigate different algorithmic
paradigms for their ability to support a quick and re-
liable decision making in dynamic routing.
Impacts of autonomously made decisions in a net-
work are analysed and evaluated in (Roughgarden,
2005).
2.2 Dynamic Network Routing
Challenge
A transport system is considered that is used to ful-
fil transport demands using a collection of vehicles.
The demand is expressed by customer requests which
are specified consecutively over time. Since the vehi-
cles are allowed to decide autonomously about their
operations, a centralized planning model/solver com-
bination cannot be deployed to tackle the problem.
As soon as a new request r is waiting to be sched-
uled, the existing autonomously deciding vehicles
check whether and how they are able to fulfil this re-
quest. In case that the vehicle v is interested to ful-
fill this request it generates a route proposal r(v) =
(n
v
1
, . . . , n
v
N(v,r)
) satisfying the following constraints.
1. Neither the vehicle capacity is exceeded nor re-
quest associated time windows are violated and
2. the vehicle returns to its home base not later than
a given time.
It is specified that a vehicle does not formulate
a proposal for request r when it is not able to fulfil
this request satisfying the two conditions mentioned
above.
The vehicles’ proposals then are compared and the
best proposal (according to current decision criteria)
is executed.
Beside additional requests, varying transshipment
or pickup as well as unloading times might be con-
sidered as a source of dynamics. Furthermore, traffic
congestions influence the travel time required for us-
ing a connection between two adjacent locations.
Let t denote the time in which an event becomes
known that requires a new route determination. The
underlying graph in which a route has to be deter-
mined is defined as
G (t) := (N (t), A (t), D (t)). The
node set
N (t) := N
f
∪
N
V
(t) consists of the static
set of network locations
N
f
and the current vehicle
positions collected in
N
V
(t). The nodes are con-
nected by the arcs collected in
A (t) (some arcs might
also represent roads that are temporarily closed). The
evaluation of a route proposal is done by applying
the evaluation function
D (t) to the nodes and arcs in-
volved in the considered route. The evaluation has to
be performed for each route proposal individually as
the travel times are not constant, but may vary with
ongoing time t due to traffic congestions and high
workload in the pickup or delivery nodes.
The request r released at time t requires the trans-
port of a good of a certain capacity c
r
from a pickup
location p
+
r
∈
G (t) to a delivery location p
−
r
∈ G (t).
A route proposal has to start at the current vehicle po-
sition, passing p
+
r
and afterwards p
−
r
and terminat-
ing at a node in
G (t). Therefore, for each vehicle a
constrained shortest path problem in
G (t) has to be
solved (K
¨
ohler et al., 2005).
2.3 Scenario Description
The scenario used here for the investigation of dy-
namic logistic networks is based on a map of Ger-
many. 18 major german cities have been selected as
nodes in the network, and edges are defined according
to main highway connections as depicted in Figure 1.
At each of the nodes, transport orders for goods of
unit size are generated randomly during runtime, and
the generation rate is dependent on the size of the city,
ranging from 2 orders per hour in Kassel to 34 orders
per hour in Berlin. A basic version of this scenario has
been described in (Wenning et al., 2007), the version
used here has some slight modifications, which are a
different amount and distribution of vehicles and the
occurence of traffic jams which is described in section
4.2.
The vehicles in this scenario have a capacity of
60 size units and a travel time limit of 8 hours be-
fore returning to their home location. This implies
they cannot cross the whole map, and transshipments
are required for transport orders that have to cover a
long distance. The amount as well as the distribution
of vehicles is subject to alteration between simulation
runs in order to increase the efficiency of transport
processes.
ICEIS 2007 - International Conference on Enterprise Information Systems
226

Berlin
Hamburg
München
Köln
Frankfurt
Dortmund
Stuttgart
Düsseldorf
Bremen
Duisburg
Hannover
Nürnberg
Dresden
Leipzig
Bielefeld
Bonn
Mannheim
Kassel
Figure 1: The simulated transport network.
3 ALGORITHMIC APPROACH
The configuration of a reactive route finding proce-
dure is subject of this section. Since the events that
cause the update of the routes and the generation of
new proposals do not follow any known probabil-
ity distribution, an a-priori-optimization is far away
from applicability so that only a reaction on a route-
corruption event remains as a remedy.
The application of existing shortest path detect-
ing algorithms is compromised by the different con-
straints that restrict the set of realizable routes in the
considered scenario. In order to apply for example
Dijkstra-based methods to identify a feasible route, a
network pre-processing has to be carried out that re-
quires the knowledge of the complete network. As
stated in the introductory section, this assumption is
not valid and consequently, another approach has to
be used.
As it is assumed that probability distributions for
the considered events are not known to the compo-
nents of the dynamic scenario, routes have to be deter-
mined reactively. Therefore, a reactive two-step route
proposal generation is carried out. In the first step,
possible routes to the designated termination node
of the vehicle’s route are identified using a network
broadcasting method. In the second step, all route op-
tions are evaluated and the highest valued route is se-
lected as the proposal of the considered vehicle (Sub-
section 3.1). For the explicit scenario introduced in
2.3, a special configuration for this algorithm idea is
proposed (Subsection 3.2).
3.1 Route Request / Route Reply -
Methods
In the approach proposed here, a distributed routing
based on reactive mechanisms from communication
networks is transferred to the application in logistics.
The vehicles need to collect information on the cur-
rent network structure in order to make reasonable
and sensible routing decisions. Here, each node in
the network only knows its adjacent nodes but other
information is not available (cf. Section 1). In partic-
ular, this is information about the links (arcs) to the
adjacent nodes and available waiting packages at the
nodes corresponding to so far unserved requests.
The access to this information is similar to the
route discovery mechanisms in ad hoc networks, for
example in Dynamic Source Routing (DSR) (Johnson
and Maltz, 1996): The initiator (in this case a vehicle)
sends a request to its adjacent node. From there, this
request is propagated to the neighbour nodes. Each
node adds some of its local knowledge about the cur-
rent status to the request so that the request is accu-
mulating information as it propagates. When it has
reached a termination node, a reply is generated con-
taining all information that was collected on the way
and is sent back to the initiator. The initiator compares
the identified routes and selects the most appropriate
one as its route proposal.
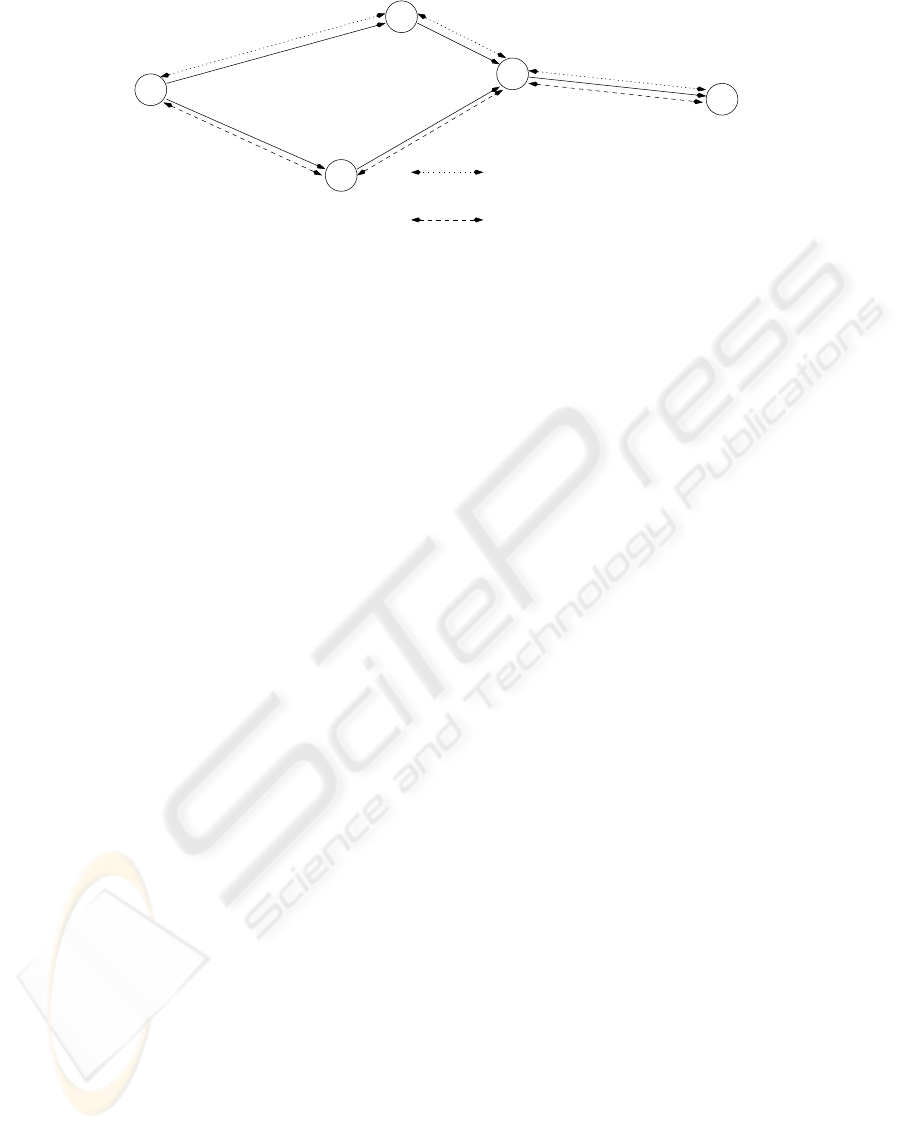
In the example illustrated in Fig. 2, the vehicle
waiting at node S needs a route to node T through the
current network
G (t) (which, in this example, is spec-
ified by the solid arcs and the nodes S, 1, 2, 3 and T).
It starts the route discovery process by sending a route
request to S, which broadcasts it to its neighbours. In
the considered example, it sends the request to node
1 (dotted line) and to node 2 (dashed line). Neither 1
nor 2 coincide with the target node T so that 1 as well
as 2 forward the request to their neighbour 3. Again, 3
is not the target node and both incoming requests are
proceeded to the next neighbour now reaching the tar-
get node T. Two routes from S to T are found: route
A (S-1-3-T) and route B (S-2-3-T). T now sends a
reply to each of the requests, integrating information
that was added by the intermediate nodes during the
request forwarding phase.
The numbers in brackets represent the evaluation
values
D (t) for passing the associated arc or node.
Therefore, route A is evaluated by 5+0+2+0+7=14
and route B is evaluated by 6+0+4+0+7=17. Route
A would become the proposal of the considered vehi-
cle if the evaluation values represent costs.
3.2 Configuration
In the simulation experiments described in the next
section, the vehicles in the scenario apply a rout-
ing method that is derived from source routing ap-
proaches in communication networks, such as the
aforementioned DSR. The knowledge about transport
INVESTIGATIONS ON OBJECT-CENTERED ROUTING IN DYNAMIC ENVIRONMENTS: ALGORITHMIC
FRAMEWORK AND INITIAL NUMERICAL RESULTS - Support for Distributed Decision Making in Transport Systems
227
(5)
(0)
(0)
(0)
(2)
(7)
(6)
(4)
S
T
1
2
3
route request / route reply A
route request / route reply B
Figure 2: Example for route request / route reply.
orders is limited to the locally available orders, and
knowledge about the network, especially estimated
travel times, are collected from distant nodes using
the described route request/route reply methods.
Before starting the routing process, a destination
node has to be found. The determination of this des-
tination node is done by counting the destinations of
the local transport orders and selecting the node as
destination that is most frequently requested. After
having obtained a route by receiving route replys, the
vehicle evaluates whether it is possible to cover the
route completely within its time constraints. If this is
not possible, the route is shortened up to a length that
does not violate the vehicle’s time constraints. The
most distant node then becomes a transshipment lo-
cation for the transport order.
4 NUMERICAL EXPERIMENTS
Results achieved from numerical experiments are re-
ported in this section. Initially, the experimental setup
is stated (Subsection 4.1). Afterwards, some nu-
merical results are presented and discussed (Subsec-
tion 4.2).
4.1 Experimental Setup
The simulation is done with the help of a simula-
tion environment developed for the simulation of au-
tonomous controlled logistics. This environment is
based on the Communication Networks Class Library
(CNCL), which is a discrete-event simulation library
originally intended for simulation of communication
networks and, with some extensions, is now also used
for the simulation of logistics. A more detailed de-
scription of the simulation environment is given in
(Becker et al., 2006).
The simulation scenario is specified as described
in section 2.3, the vehicles are selecting their routes,
according to the description in 3.2, by determining
the most requested destination and discovering a route
with the aforementioned route discovery scheme.
4.2 Presentation and Discussion of the
Results
This section presents results of simulations of three
different variations of the scenario with respect to dy-
namics, especially traffic jams:
1. Free traffic flow, i.e. no traffic jams are present for
the whole simulation time.
2. Traffic jams appear randomly between Hannover
and Kassel with a jam probability of 0.2 and an
average vehicle delay of 1.5 hours when being
stuck in a traffic jam. The vehicles have no knowl-
edge about the traffic jams.
3. Same as 2. except for the vehicles having knowl-
edge about the traffic jams.
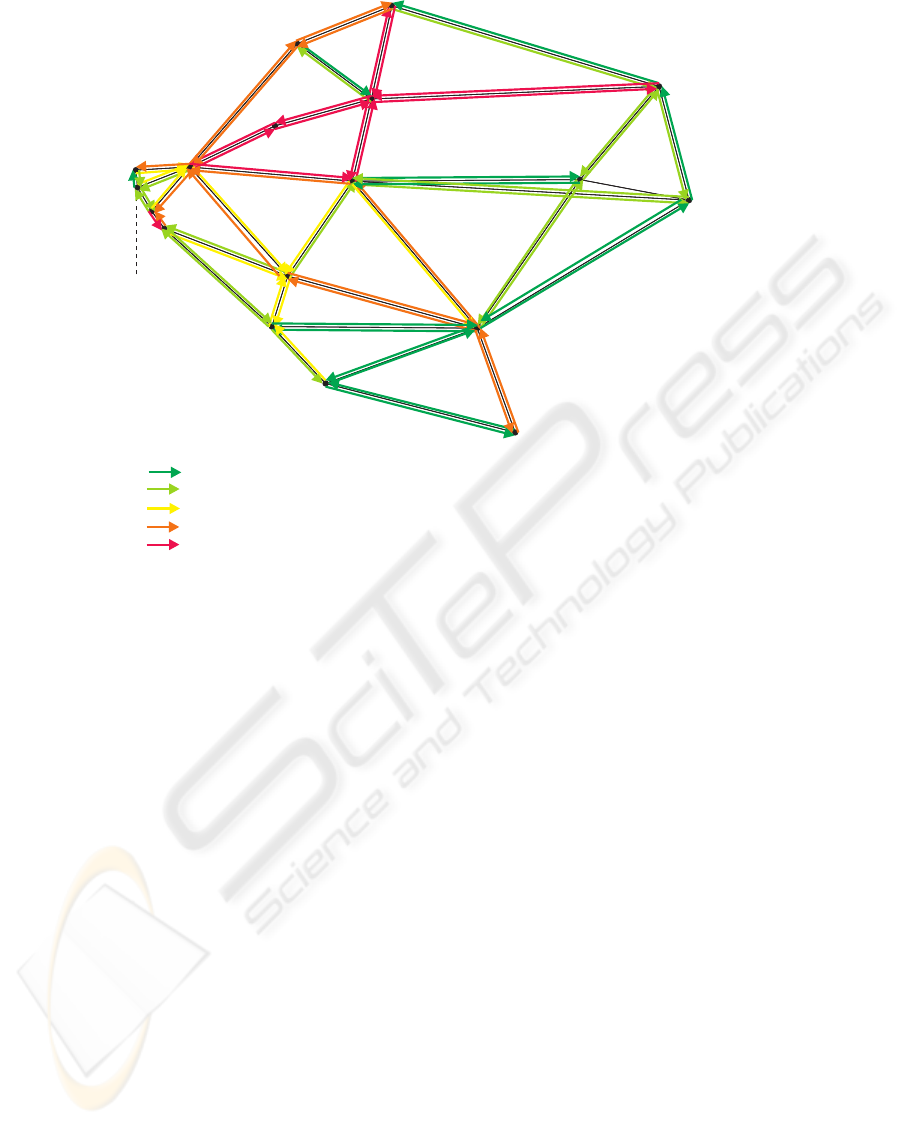
Figure 3 graphically shows the traffic flow in the
first case. No traffic jams are present, and some main
connections can be identified. 20 vehicles are the
minimum amount which is necessary to handle the
transport demand in this case, and their average ca-
pacity utilisation is 57.5%.
In the second case, traffic jams are introduced on
a central and highly utilized part of the road network,
the connection between Hannover and Kassel. As the
vehicles had no knowledge of the traffic jams, they
were planning their routes as if all roads were free.
The effect was that, when the number of vehicles was
not changed, some locations in the network were not
served frequently enough any more, causing the com-
plete scenario to become unstable with continuously
growing package stocks and delivery delays. To coun-
teract this effect, the number of vehicles in the sce-
nario had to be increased to 23, while their capacity
ICEIS 2007 - International Conference on Enterprise Information Systems
228

< 250
250 ... 400
400 ... 650
650 ... 1000
> 1000
Hamburg
Bremen
Dortmund
Duisburg
Berlin
Hannover
Leipzig
Dresden
Nürnberg
Kassel
München
Stuttgart
Düsseldorf
Köln
Frankfurt
Mannheim
Bonn
Number of trips on edge
Bielefeld
Figure 3: Usage of edges without appearance of traffic jams.
utilisation went down to 50.1%. Figure 4 shows the
traffic flow in this scenario. It can be seen that there
is more traffic in the northern/northwestern part of the
map, which matches the fact that all additional vehi-
cles were added to the Hamburg node.
When, in case 3, the vehicles had knowledge
about the jams, it was possible to reduce the num-
ber of required vehicles back to 20, resulting in traf-
fic flows very similar to Figure 3 again, yet with a
slightly higher vehicle capacity utilisation than with-
out the traffic jams (58.1% vs. 57.5%). This proves
the knowledge about current dynamics improves the
performance of object-centric routing in the scenario.
It enables the vehicles to adapt their routing to the
changed road conditions, thus improving the effi-
ciency of the overall system.
The results shown here are initial results for one
approach to implement autonomous control into lo-
gistic components. There are other approaches which
have been investigated (Wenning et al., 2006) or are
currently under investigation, all of them based on
the idea of transferring concepts from communication
networks to logistics.
5 CONCLUSIONS AND
OUTLOOK
This paper has introduced important aspects of a de-
centralized planning approach for logistics. This ap-
proach relies on a mechanism that collects informa-
tion about the current state of the dynamic environ-
ment similarly to route discovery processes in com-
munication networks. It has been shown in simula-
tion results that knowledge about the current state im-
proves the performance of the logistic system by util-
ising resources more efficiently.
The authors are currently continuing their research
on object-centered routing in several directions: be-
sides the further work on suitable algorithms, one fo-
cus is to achieve comparability to traditional logisti-
cal routing approaches, another is to even include the
load as active participant with decision capabilities in
the routing process.
ACKNOWLEDGEMENTS
This research was supported by the German Research
Foundation (DFG) as part of the Collaborative Re-
INVESTIGATIONS ON OBJECT-CENTERED ROUTING IN DYNAMIC ENVIRONMENTS: ALGORITHMIC
FRAMEWORK AND INITIAL NUMERICAL RESULTS - Support for Distributed Decision Making in Transport Systems
229
<250
250...400
400...650
650...1000
>1000
Hamburg
Bremen
Bielefeld
Dortmund
Duisburg
Berlin
Hannover
Leipzig
Dresden
Nürnberg
Kassel
München
Stuttgart
Düsseldorf
Köln
Frankfurt
Mannheim
Bonn
Numberoftripsonedge
Figure 4: Usage of edges: occurance of jams, but not known by the vehicles.
search Center 637 “Autonomous Cooperating Logis-
tic Processes”.
REFERENCES
Becker, M., Wenning, B., G
¨
org, C., Gehrke, J., Lorenz,
M., and Herzog, O. (2006). Agent-based and discrete
event simulation of autonomous logistic processes. In
Borutzky, W., Orsoni, A., and Zobel, R., editors, 20th
European Conference on Modelling and Simulation,
pages 566–571.
Bitran, G. and Tirupati, D. (1993). Hierarchical production
planning. In Graves, S., Kan, A. R., and Zipkin, P.,
editors, Logistics of Production and Inventory. North-
Holland.
Fiat, A. and Woeginger, G., editors (1998). Online Algo-
rithms. Springer.
Irani, S., Ku, X., and Regan, A. (2004). On-line algorithms
for the dynamic traveling repair problem. Journal of
Scheduling, 7:243–258.
Johnson, D. and Maltz, D. (1996). Dynamic source rout-
ing in ad hoc wireless networks. In Imielinski, T. and
Korth, H., editors, Mobile Computing. Kluwer.
K
¨
ohler, E., M
¨
ohring, R., and Schilling, H. (2005). Accel-
eration of shortest path and constrained shortest path
computation. In SE, N., editor, Proceedings of WEA
2005. Springer.
Langer, H., Timm, I., Sch
¨
onberger, J., and Kopfer,
H. (2007). Integration von Software-Agenten
und Soft-Computing-Methoden f
¨
ur die Transport-
planung. In Nissen, V. and Petsch, M., ed-
itors, Softwareagenten und Soft Computing im
Gesch
¨
aftsprozeß-Management, pages 39–51. Cuvil-
lier.
Powell, W., Jaillet, P., and Odoni, A. (1995). Stochastic and
dynamic networks and routing. In Ball, M., Magnanti,
T., Monma, C., and Nemhauser, G., editors, Network
Routing. Elsevier.
Roughgarden, T. (2005). Selfish Routing and the Price of
Anarchy. MIT Press.
Wenning, B., Pesch, D., and Timm-Giel, A. (2006). A dis-
tributed routing approach for vehicle routing in logis-
tic networks. In Proceedings of the 64th IEEE VTC.
Wenning, B., Rekersbrink, H., Becker, M., Timm-Giel, A.,
G
¨
org, C., and Scholz-Reiter, B. (2007). Dynamic
transport reference scenarios. In H
¨
ulsmann, M. and
Windt, K., editors, Understanding Autonomous Coop-
eration and Control in Logistics - The Impact on Man-
agement, Information and Communication and Mate-
rial Flow (to appear). Springer.
ICEIS 2007 - International Conference on Enterprise Information Systems
230
