
Automatic Detection of Facial Midline
as a Guide for Facial Feature Extraction
Nozomi Nakao, Wataru Ohyama, Tetsushi Wakabayashi and Fumitaka Kimura
Graduate School of Engineering, Mie University
1577 Kurimamachiya-cho, Tsu-shi, Mie, 5148507, Japan
Abstract. We propose a novel approach for the detection of the facial midline
from a frontal face image. The use of a midline as a guide reduces the compu-
tation time required for facial feature extraction (FFE) because midline is able
to restrict multi-dimensional searching process into one-dimensional search. The
proposed method detects facial midline from the edge image as the symmetry
axis using a new application of the the generalized Hough transformation to de-
tect the symmetry axis. Experimental results on the FERET database indicate that
the proposed algorithm can accurately detect facial midline over many different
scales and rotation. The total computational time for facial feature extraction has
been reduced by a factor of 280 using midline detected by this method.
1 Introduction
Biometrics employing a fully automatic face recognition or authentication technologies
requires both face detection and recognition[1]. In the face detection problem, we are
given an input image that may contain one or more human faces (or it may contain no
face at all). The scale of the face is not known in advance. For example, in a 512 × 768
input image, the face may appear in a small region 64 × 64 size, or it might occupy
the entire range 512 × 768 pixels. The problem is to segment the input image and
isolate the face(s). Particularly, it is necessary to determine a tight bounding box around
each face that contains just the face (forehead to chin), excluding as much of the hair
as possible. Of course, the results of the recognition task[2] depend heavily on how
well the detection task has been done. For example, when the bounding boxes are not
tight enough, Chen et.al[3] showed that non-face artifacts tend to dominate and hence
corrupt the feature extraction process needed for recognition. In this paper we focus on
face detection and localization.
For a human face, there are important features or landmarks that one can exploit
for detection purposes. Although other features can be chosen, we will focus on the
4 most commonly used: center of left eye, center of right eye, tip of nose, and center
of mouth. If the position of these facial features is known, then face detection and
localization can be done easily and more accurately. The detection of facial features,
though, is computationally expensive; hence it makes sense to apply the detection only
in the vicinity of a face and not the entire image (which may contain many non-face
artifacts).
Nakao N., Ohyama W., Wakabayashi T. and Kimura F. (2007).
Automatic Detection of Facial Midline as a Guide for Facial Feature Extraction.
In Proceedings of the 7th International Workshop on Pattern Recognition in Information Systems, pages 119-128
DOI: 10.5220/0002426701190128
Copyright
c
SciTePress

Although the facial features are essential information for the detection of facial
bounding box, the computational cost to detect these features is not negligible. Even
for frontal face images can be recognized as the most simple situation in face recogni-
tion, there are many parameters to estimate, for instance location of each feature, scale
and rotation of faces. If we get any guide that can be utilized for the facial features, by
a method that is easier than that for facial features, it is possible to reduce the computa-
tional cost.
In this paper, we propose a facial midline detector based on generalized Hough
transformation (GHT). This method detects the facial midline from a grayscale image
where one frontal face is. Since faces are often slanted in image, the detection method
must be robust for these varieties. We present an automatic detection technique of the
facial midline and evaluate the performance of the proposed method by experiments
with facial images from the FERET database[4].
In contrary to our method X.Chen et.al.[5] have proposed an automatic method-
ology for the facial midline detection. In their method, axes of facial symmetry are
detected as those which maximize the Y value that is based on the gray level differences
(GLD) between the both sides of the axis. Their approach has the following twofold
drawbacks. (1) the Y value is quite sensitive to change of lighting conditions: if faces
are illuminated from left or right sides, GLD is easily influenced. (2) It is computa-
tionally expensive because the maximization problem for the Y value is solved by a
sweeping algorithm: in other words, to find a axis which maximizes the Y value, we
have to evaluate all combinations of rotation and position of candidates.
The remainder of this paper is organized as follows. In Section 2, we present the
proposed methodology used for face midline detection. Section 3 gives experimental
results and a discussion about the impact of this method is given in Section 4.
2 Proposed Methodology
In this section, we present the proposed methodology for facial midline detection. Our
method is based on bilateral symmetry of human face and extracts the symmetry axis
as the facial midline. To extract the axis reliably, we employ the generalized Hough
transformation (GHT)[6][7] that is able to extract non-analytical curves from an image.
2.1 What is the Facial Midline?
We define the facial midline as the perpendicular bisector of the interocular line seg-
ment (connecting each eyes). As exampled in Fig.1, when the face in an input image
is slanting with the angle θ, the midline should be detected having the same slanting
angle. Detecting a line on an image is an equivalent problem of detecting one point at
which the line passes and the angle of the line. In Fig.1, the line passing through the
point c = (c
x
, c
y
) and the angle θ is expressed as
x − c
x
sin θ
=
y − c
y
cos θ
. (1)
We can determine these two parameters, c and θ, from a pair of points between
which symmetry axis line passes. When two points, p = (p
x
, p
y
) and q = (q
x
, q
y
), are
120

interocular
line segment
Fig.1. Example of facial midline as the symmetry axis.
symmetrical to each other such that a point c on the axis can be expressed as c =
p+q
2
.
And the angle θ is obtained as that is orthogonal to the angle of (q − p). Consequently,
we can rewrite expression (1) using p and q as follows.
x −
p
x
+ q
x
2
sin θ
=
y −
p
y
+ q
y
2
cos θ
, (2)
θ = tan
−1
q
y
− p
y
q
x
− p
x
. (3)
The problem to solve is to extract this pair of symmetrical points, which are given as
examples by p and q in Fig. 1.
We employ the assumption where a frontal face is globally symmetrical. However,
the symmetry of faces is easily corrupted when faces are illuminated form left or right
sides. In this case, to reduce the influences by illuminations, we have to combine pre-
processes in our method.
2.2 Overview of the Methodology
The proposed method consists of three main stages, as shown in Fig. 2. In the first stage,
we apply preprocessing that consists of edge detection, thresholding and noise removal.
The input of the proposed method, which is demonstrated by (a), is a grayscale image
containing one human face in unoccluded frontal view. The size of image is 512 × 768
pixels. And the face is nonrigid and has a high degree of variability in scale, location,
and slant. The resultant image after the preprocessing contains strong edge components
of which lengths are sufficient for the GHT. An example of resultant preprocessed image
is shown in (b). The second stage of this method is the GHT. The GHT requires a proper
reference point for reasonable execution. The reference point is illustrated by p in (b).
The GHT extracts the point that is symmetric to the reference point. The resultant point
is called the relevant point in this research, which is denoted by q in (c). In the third
121
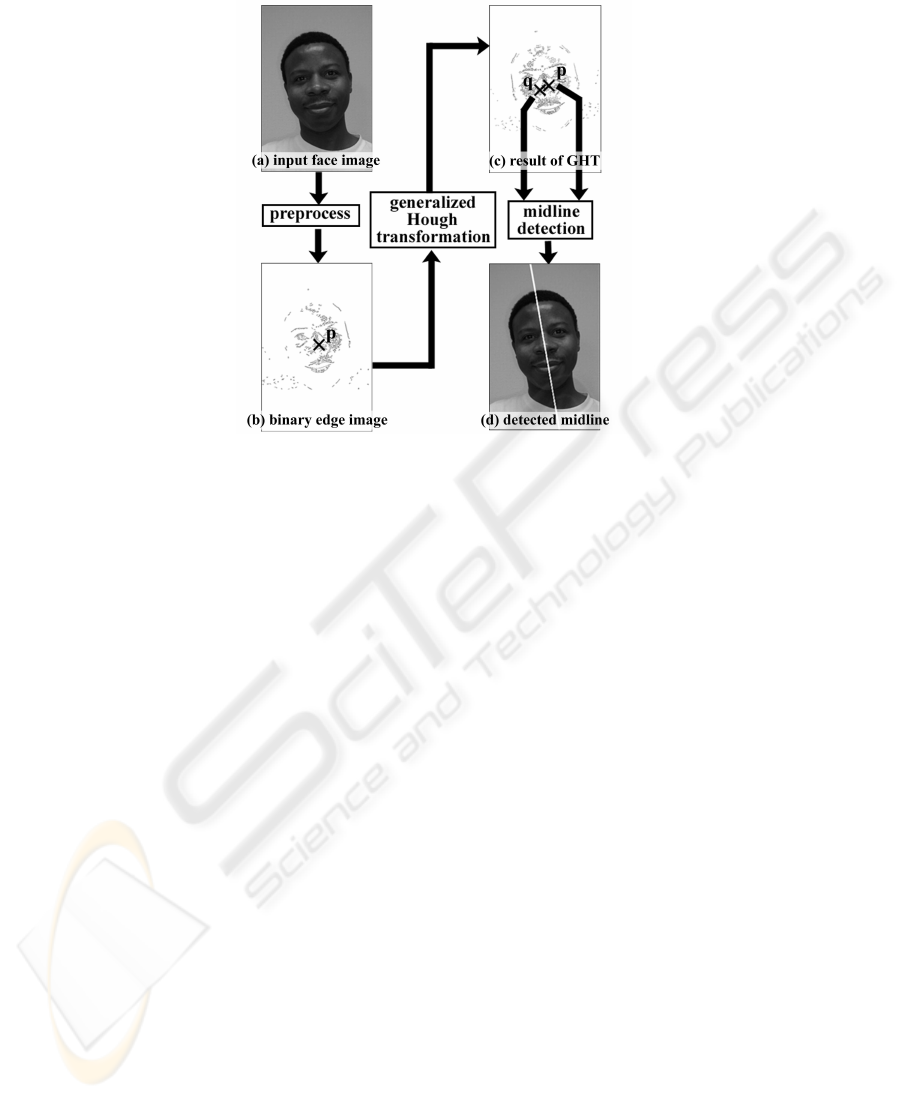
Fig.2. Three main stages of the proposed facial midline detection.
stage, using the detected coordinates of two symmetric points p and q, we obtain the
facial midline by (2).
Brief descriptions of the each process are presented in the following subsections.
2.3 Preprocessing
The preprocessing in the proposed method generates a binary edge image from input
images. Since the GHT algorithm we employ in the second stage is applicable only to
a binary image, it is important to obtain proper binary images for sufficient results. For
instance, the binary image that includes too much noise increases the computational
cost of the GHT and easily corrupts the results mean while the image with too little
edge components makes the reliability of the GHT significantly weak.
At first, edge magnitude of an input image is calculated by using the Sobel operator.
Edge image is binarized by p-tile thresholding. In this method, a threshold T is selected
as such that p% of the image area has gray values (i.e. edge magnitude) less than T
and the rest has gray values larger than T . Because the Sobel operator enhances noise
in the original image, the resultant binary image might contain some noise if we could
determine the best threshold. To remove the noise, we eliminate edge elements whose
length is smaller than 15 pixels or grater than 800 pixels.
The parameter p for the p-tile thresholding is determined as 91% from preliminary
observation on design data set. The design data set consists of 200 facial images selected
randomly from the FERET database.
122
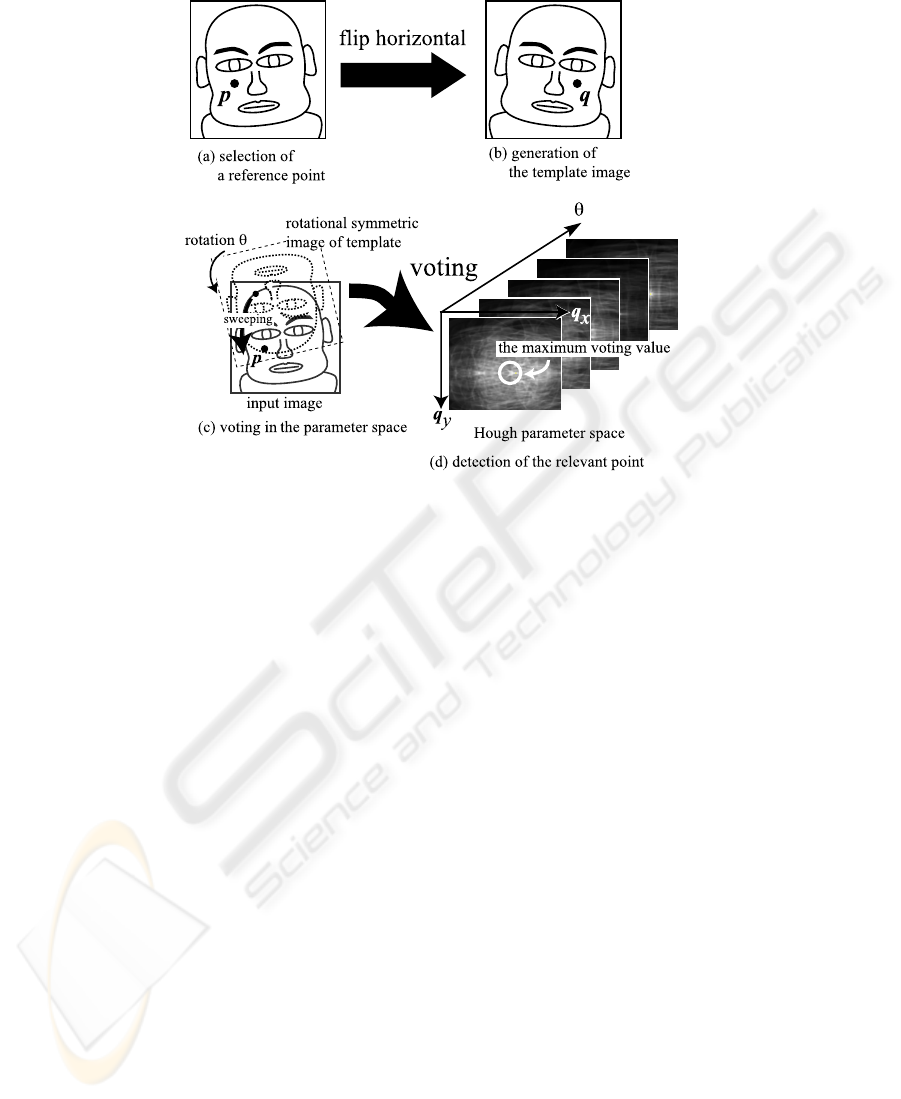
Fig.3. The generalized Hough transformation in the proposed method.
2.4 Generalized Hough Transformation
The generalized Hough transformation (GHT) is an algorithm to detect objects, which
have the same (or similar) shape as a given template, from given binary images. It is
empirically known that GHT is robust to both noise and lack of objects in images.
For binary images, GHT behaves as a fast algorithm of template matching. To adapt
a template to objects in an input image involving variety of poses: scale, position and
rotation, we have to transform and apply the template on the input image by repetition;
hence the computation cost becomes high. To reduce this computational time, GHT
employs voting strategy in a parameter space whose dimensionality is equivalent to the
variety of poses.
The GHT in this research is aimed at finding the relevant point that is symmetry
to the reference point. The assumption of facial bilateral symmetry suggests that the
edge image might also be symmetric. So we employ the mirror image of the binary
edge image obtained by preprocess as a template. This means that GHT detects the
most similar shape object to the mirror image from the binary edge image. When GHT
detects the object, we can easily detect the pair of symmetry points.
The tasks of GHT in the proposed method are as follows:
(1) Selection of the reference point: For GHT, we should select a reference point in
an image. The selection of the reference point is arbitrary but very important for
reasonable execution because it influences the performance of the following GHT
steps. It is empirically known that using the centroid as the reference point con-
123

Fig.4. Basic idea of fast midline detection.
tributes to reliable results by GHT. So, we use the centroid of all black pixels (edge
pixels) in the binary edge image as the reference point. An example of the reference
point is shown as p in Fig. 3 (a).
(2) Generation of the template image: As described above, we use the mirror image
of the binary edge image corresponding to the vertical axis as a template. When the
edge image is symmetric corresponding to the vertical axis, the original image and
the template might be overlap considerably at the relevant point (Fig.3(b)).
(3) Voting in the parameter space: The GHT’s parameter space in this method be-
comes three dimensional, i.e. q
x
, q
y
and rotation θ. They correspond to the object’s
variety of poses. Fig. 3(c) illustrates the voting process in this method. The sweep-
ing template, which is point symmetric image of the template (b), scans each of all
edge pixels in the binary edge image. During sweeping, the corresponding point in
the parameter space accumulates the vote from the template image.
(4) Detection of the relevant point: The location and the angle of rotation of the tem-
plate are detected from the point in the parameter space, where the maximum voting
value is obtained (Fig. 3(d)).
2.5 Fast Algorithm of GHT
The above tasks provide the proper information to adapt the template to the binary edge
image, though, computational time for these tasks, especially for voting in the three-
dimensional parameter space, is not negligible. To reduce this cost, we introduce the
following restriction for the parameter space.
When a human face displays symmetric corresponding to the vertical axis, in other
words the face is straight in image; the vertical position q
y
of the template (mirror
image) is exactly same as that of the original binary edge image. If both the reference
and edge images were rotated with the same angle to the opposite direction each other,
the change of q
y
between the template and the original image is eliminated. This means
that the dimensionalities of the parameter space are restricted to two, q
x
and θ. Fig. 3
and Fig. 4 illustrates the basic concepts of this method.
Computational time for GHT is significantly reduced by this fast algorithm. In our
pilot study, the time for one GHT operation is reduced from 10[s] to 0.06[s].
124
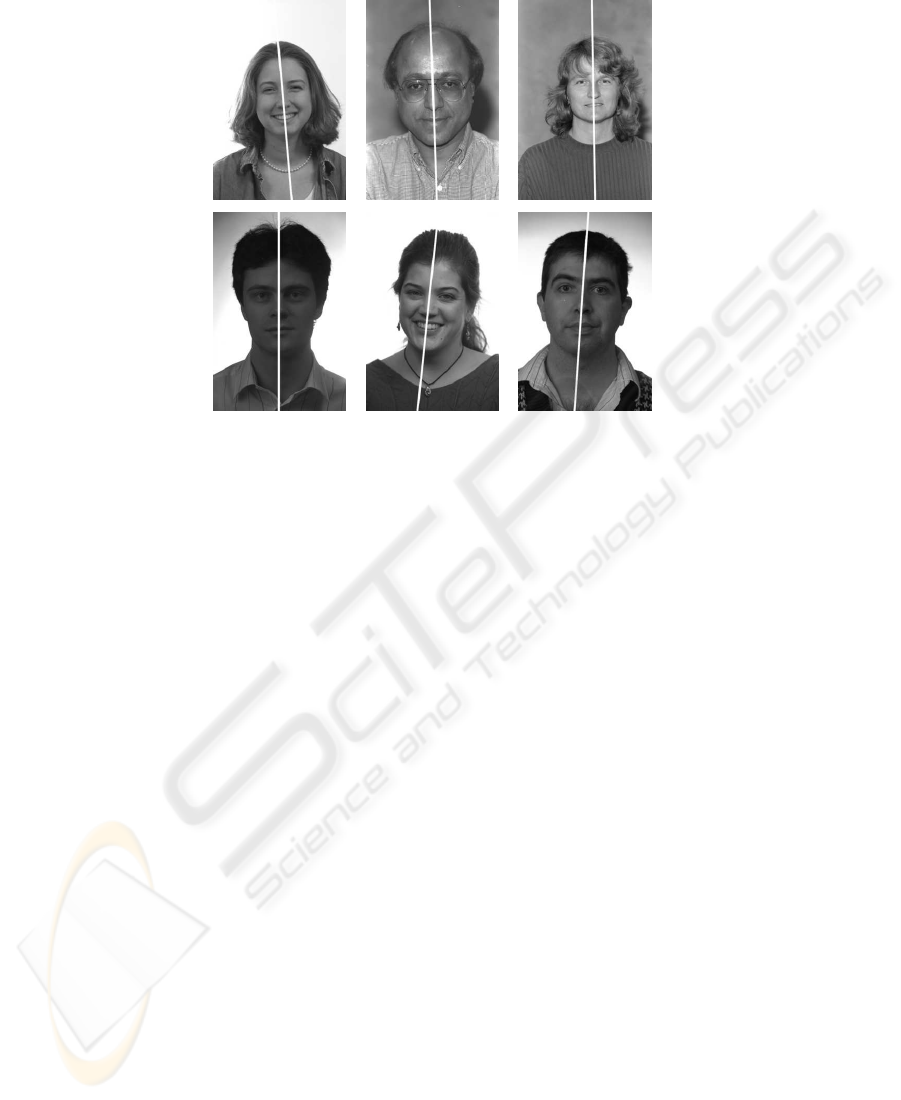
Fig.5. Result of the midline detection.
3 Experiments
To verify the effectiveness of the proposed method, we apply the proposed method to
the images from FERET database. Some examples of detected midline are shown in
Fig. 5. The white line in each picture is the detected midline. The face midline over
many different scales and rotation has detected correctly.
Next, we quantify the performance of the proposed method by evaluation experi-
ment with 2409 frontal face images from the fa and fb probes in FERET database. For
this test, we compare the detected midline with the reference midline obtained from
ground-truth eye locations. As used in [5], two measurements, angle error ∆θ and dis-
tance error s, are used to evaluate the performance of midline detection. The angle
error ∆θ is the difference between detected and reference midlines. The distance error
s is the distance between theses two midlines on the interocular line segment. Fig. 6
illustrates these measures.
Fig. 7 shows the angle error and distance error of the detected midlines for the 2409
images in FERET. 92.74% of the detected midlines are within 5 degrees angle error;
this means that the rotations of face in 92.74% of input images are correctly estimated
by the proposed method. And 75.80% detected distance error are within 10 pixels; this
means that the positions of midline in 75.80% of input images are detected correctly.
These results suggest that the performance of our method is superior than that in [5].
This result suggests that the proposed method provides acceptable performance for
the midline extraction. The computational time of the proposed method for the 2409
facial images is 144.9[s] by a 2.66 GHz Intel Core2 CPU. The frame rate is 16.6
[frames/s].
125
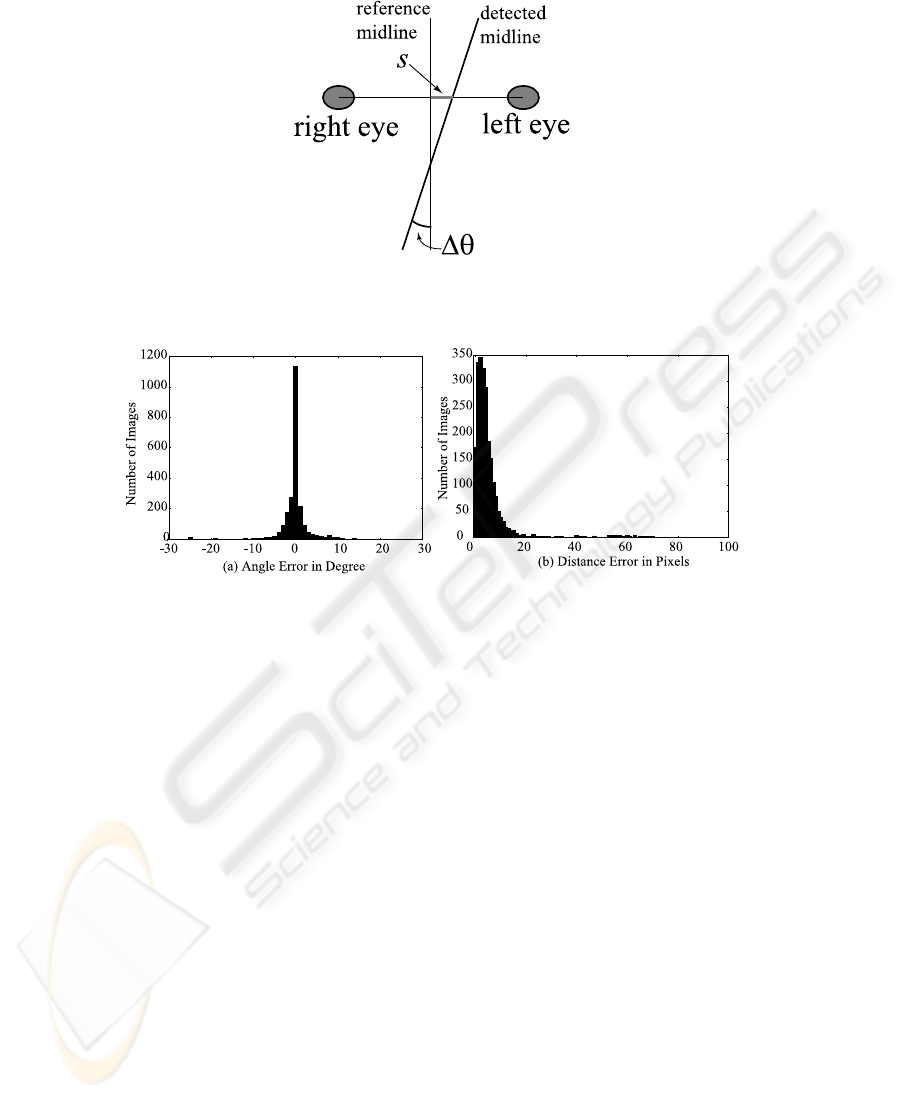
Fig.6. Angle error and distance error for evaluation.
Fig.7. Evaluation results.
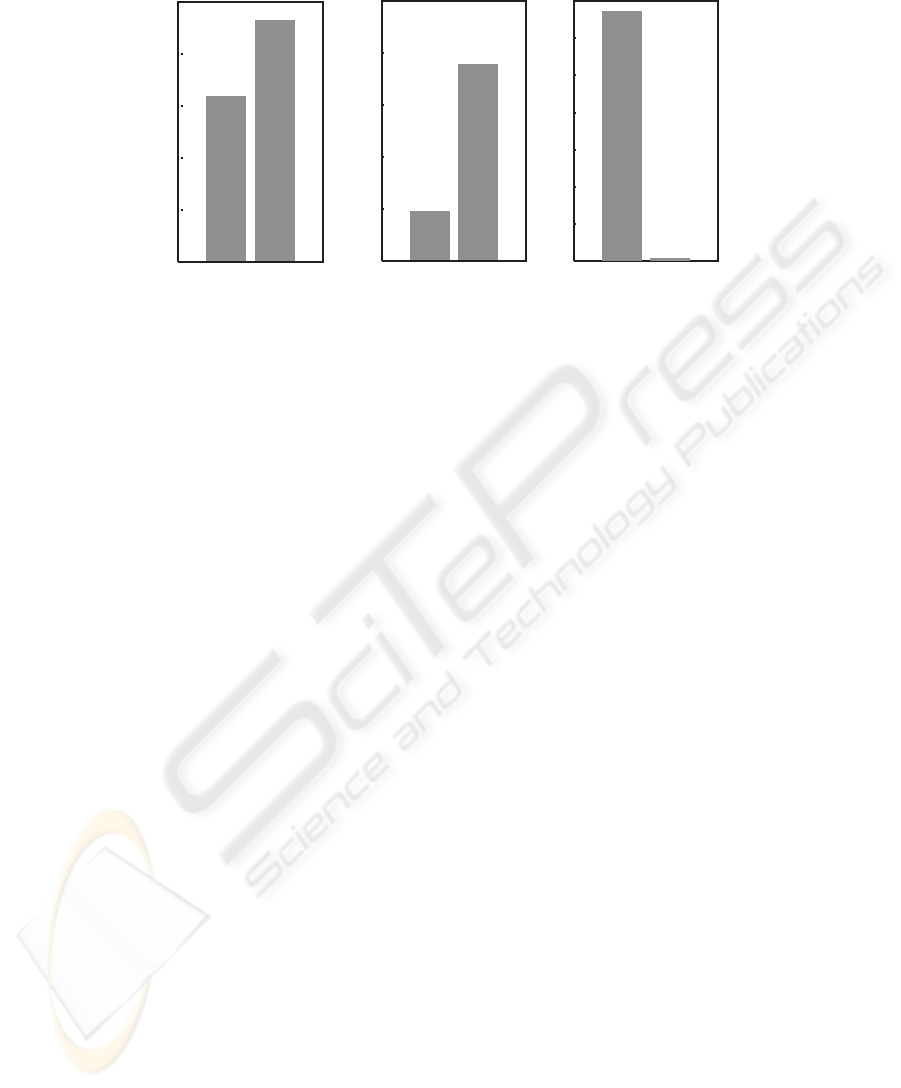
To demonstrate the advantage of our proposed method, we compare the proposed
method and the conventional one, which has been proposed in [5], for the angle and
the distance errors. Fig. 8 (a) and (b) illustrate the comparison of these errors. (a) and
(b) illustrate the number of images where the angle and the distance errors are less than
5 degrees and 10 pixels respectively; in other words, the midline is detected correctly.
These results indicate that the accuracy of midline detection is significantly improved
by the proposed method. We also compare these methods for the computational time.
Fig. 8 (c) indicates that the computational time is reduced from 6.7[s] to 0.08[s] for one
input image.
4 Impact of Midline Detection on Facial Feature Extraction
The impact of the proposed method for the facial feature extraction (FFE) is consider-
ably significant. Here, we discuss the advantage of the detected midline in FFE.
The use of a midline as a guide for feature extraction reduces the computational
time required for FFE. In FFE, an algorithm must estimate many parameters, which
126
0
20
40
60
80
100
proposed
conventional
proposed
conventional
proposed
conventional
% of input image
92.74
63.72
0
20
40
60
80
100
% of input image
75.80
19.43
0
1
2
3
4
5
6
7
[s]
0.08
6.7
(a) angle error
within 5 degrees
(b) distance error
within 5 degrees
(c) computational time
for one input image
Fig.8. Performance comparison between the proposed and the conventional methods.
describe the face, i.e. scale, rotation and position. Midlines which are estimated properly
eliminate these estimation tasks for rotation and reduces the range of position variety.
Fig. 9 shows examples where the detected midlines are used as guide for eye detec-
tion. In this figure, all eyes are extracted sufficiently employing midlines. The proposed
method followed by a simple template matching is employed for the extraction of eyes.
Since we have obtained the rotation angle and the position of the midline before the
template matching, the rotation and parallel shift are corrected preliminary; it makes the
matching method simpler. The comparison of computational time between the methods
with and without the midline detection provides that midline detection reduces the total
computational time from 280 to 1 for the FERET database.
5 Conclusions
In this paper, we propose a detection methodology for the face midline from an image.
Our method based on the GHT is fast, easy to implement and has good performance.
Using detected midlines as a guide for facial feature extraction reduces the computa-
tional cost.
Our future work consists of (1) further improvement of the performance, (2) com-
paring the performance of this method with other methodologies and (3) development
of proper application of the detected midline.
Acknowledgements
Portions of the research in this paper use the FERET database of facial images collected
under the FERET program, sponsored by the DOD Counterdrug Technology Develop-
ment Program Office.
127

Fig.9. Results of the facial feature extraction where the midlines are employed as guide for
restriction to the vertical scan-line number of one.
References
1. M.-H. Yang, D. J. Kriegman, and N. Ahuja.: Detecting faces in images: A survey. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence, Vol. 24, No. 1 (2002) 34–58
2. W.Zhao, R.Chellappa, P. Phillips, and A.Rosenfeld.: Face recognition: A literature survey.
ACM Computing Surveys, Vol. 35, No. 4 (2003) 399–458
3. L.-F. Chen, H.-Y. M. Liao, J.-C. Lin, and C.-C. Han.: Why recognition in a statistics-based
face recognition system should be based on the pure face portion: a probabilistic decision-
based proof. Pattern Recognition, Vol. 34, No. 7 (2001) 1393–1403
4. P.J. Phillips, H. Moon, S.A. Rizvi, P. J. Rauss.: The FERET Evaluation Methodology for
Face Recognition Algorithms, IEEE Trans. Pattern Analysis and Machine Intelligence, Vol. 22
(2000) 1090–1104
5. X. Chen, P. J. Flynn, K.W. Bowyer: Fully Automated Facial Symmetry Axis Detection in
Frontal Color Images, 4-th IEEE Workshop on Automatic Identification Advanced Technolo-
gies, (2005) 106–111
6. D.H.Ballard.: Generalizing the Hough Transform to Detect Arbitrary Shapes, Pattern Recog-
nition, Vol. 13, No. 2 (1981) 111–122
7. E.R.Davis.: A New Framework for Analysing the Properties of the Generalized Hough Trans-
form, Pattern Recognition Letters, Vol. 6 (1987) 1–7
8. O. Jesorsky, K.J. Kirchberg, and R.W. Frischholz.: Robust Face Detection Using the Hausdorff
Distance, Proc Int’l Conf. Audio- and Video-Based Biometric Person Authentication (2001)
90–95
9. M. Hamouz, J. Kittler, J.-K.Kamarainen, P.Paalanen, H. K
¨
alvi
¨
anen, and J.Mates.: Feature-
Based Affine-Invariant Localization of Faces, IEEE trans. On Pattern Analysis an Machine
Intelligence, Vol. 27, No. 9 (2005) 1490–1495
128
