
MACHINE BIOLOGICAL CLOCK
The Time Dimension in a Organic-Based Operating System
Mauro Marcelo Mattos
Computing Systems Department, FURB- University of Blumenau, R.Braz Wanka 238, Brazil
Blumenau, Santa Catarina, Brazil
Keywords: Organic Computing, Machine Biological Clock, Knowledge-based Operating System.
Abstract: A Knowledge-Based Operating System is an embodied, situated, adaptive and autonomic system based on
knowledge abstraction which has identity and intelligent behavior when executed. We have identified three
dimensions over which such a new operating system paradigm has to be based: (i) physical dimension, (ii)
logical dimension, and (iii) temporal dimension. The physical dimension describes the physical components
and their structural relationship. The logical dimension describes the functional characteristics of each
physical component and the time dimension is provided in order to enable the entire system to perceive the
time flow – as a biological clock in human beings. This work presents the Machine Biological Clock
concept.
1 INTRODUCTION
“Twenty years ago, on November 12, 1986, Fred
Turek, Dave Hudson, Joe Takahashi, and Gene
Block founded the Society for Research on
Biological Rhythms. Who would have imagined that
today we are analyzing the structural biology of
bacterial clock proteins? Or that we are performing
real-time measurements of rhythmic gene expression
within individual cells in a dish? Or that we are
delineating the neurobiology of a neurotransmitter
that underlies narcolepsy? And that’s just for
starters. Every other year, we have been gathering
at this meeting to announce, debate, and celebrate
these advances, in presentations that cut across.”
(Schwartz, 2006).
In his effort to describe time as a subjective
experience in terms of his philosophy of
Phenomenology, Husserl grapples with the
succession of perceived moments of conscious
existence by using the example of the melody to
illustrate his point. In a melody, each successive
note exists in time for a moment, and each moment
represents a new ‘now’ point. Each part of the
melody is related to its antecedent and to the notes
yet to come. Our apprehension of the melody cannot
be obtained outside the context of successive notes.
“Therefore, the perceiving of a melody is in fact a
temporally extended, gradually and continuously
unfolding act, which is constantly an act of
perceiving.” (Husserl, 1893-1917). This temporality
is a subjective construct. (Craft, 2000).
According to Stulp and Beetz (2002), agent-
based systems are solving more and more complex
tasks in increasingly challenging domains, the
systems themselves are becoming more complex
too, often compromising their adaptivity and
robustness.
In robotics projects, system designers cannot
foresee each situation, or all the possible outcomes
of an action. Therefore, hand-coding the controllers
is considered intractable and failure-prone task.
This situation is a reality in general purpose
computational systems. According to Hayes-Roth
(2006), “the best systems of our times have been
hand-crafted by great engineers. These system
makers have analyzed the task environments,
knowledge requirements, and reasoning skills
necessary for successful applications. This approach
can work for any well-defined and sufficiently
narrow task. But, if the system fails, the engineers
would diagnose and debug the errors. They would
determine what knowledge to add or modify, how to
program it, and how to modify and rebalance the
pre-existing programs to accommodate the new
performance without harming the parts that already
worked well. Automation in adaptation, learning,
and knowledge acquisition was very limited – a tiny
fraction of the overall knowledge required, which
the engineers mostly prepared manually. We have
76
Marcelo Mattos M. (2008).
MACHINE BIOLOGICAL CLOCK - The Time Dimension in a Organic-Based Operating System.
In Proceedings of the First International Conference on Biomedical Electronics and Devices, pages 76-83
DOI: 10.5220/0001046800760083
Copyright
c
SciTePress

not yet figured out how to make the systems
responsible for their own debugging and
improvement”.
A promising approach to solve this problem is to
provide agents with reflective capabilities. Agents
that can reflect on the effects and expected
performance of their actions are more aware and
knowledgeable of their capabilities and
shortcomings. This is called “action awareness”
(Stulp and Beetz, 2002).
Another approach is based on an “efficient
thought” concept (Hayes-Roth, 2006). This concept
lists eight steps that the most complex organizations,
in general, perform in parallel. This approach states
that the intelligent being (a) observes what’s
happening in the environment, (b) assesses the
situation for significant threats and opportunities, (c)
determines what changes would be desirable, (d)
generates possible plans to operate those changes,
(e) projects the likely outcomes of those plans, (f)
selects the best plan, and (f) communicates that plan
to key parties before implementing it. Throughout
the process, the intelligent being (g) validates and
improves its model.
The new research area that intends to solve some
of the problems pointed out is called Organic
Computing (OC). The main goal of OC is the
technical usage of principles observed in natural
systems. (Muller-Schloer, 2004).
In this paper, we introduce a computational
model for what we call “machine biological clock”
in order to make possible to build a really reflexive
environment where the system can perceive the time
flow. This concept, that has been ignored in previous
works is, in our point of view, the most important
concept that has to be considered if we plan to build
intelligent systems. Or, as said in Brachman (2002)
0, if “we want to transform them from systems that
simply react to inputs into systems that are truly, in a
word, cognitive. Most formal and intuitive
definitions tell us that cognition is about knowing.
Our image of a cognitive system, then, is one that
can indeed know things and act on that knowledge.
It can take explicit knowledge gleaned in a host of
ways and go beyond it to important implicit
knowledge, ranging from pure and simple logical
deduction to what we might call ‘plausible
reasoning’ ”.
The paper is organized as follows: a problem’s
contextualization in operating system area is
presented in section 2; a knowledge-based operating
system concept in section 3; an overview of the
biological clock concept in section 4; section 5
describes the time dimension in a KBOS system;
section 6 presents some related works and in the
conclusion section the final comments are presented
.
2 WHY A NEW CONCEPT?
In our point of view, three concepts contribute to
reduce our possibilities in building really intelligent
systems: (i) the multitasking concept, (ii) the
operator concept and, (iii) the program concept.
Traditional operating systems support the notion
of a hardware abstraction level in which each
application is supposed to possess its own processor
(and other resources). This situation and the fact
that, in general, all commercial operating systems
are based on a multitasking concept (introduced in
1964), contribute to the permanence of problems
identified 30 years ago (Linde, 1975). The problems
range from security to usability, including lack of
adequate behavior in fluctuating execution
conditions and user’s privacy (Brachman, 2002).
Today we are also faced by new demands like
pervasive computing and organic computing, where
self-adaptation and self-reconfiguring are the main
goals.
Besides that, there are two other concepts that
contribute to make things worse: (i) the operator
concept, and (ii) the program concept.
The operator function was necessary during the
first years of computing since computers were big
and difficult to use. Operators, at that time, were
responsible for turning the machine on/off, starting
programs, collecting reports, restarting programs and
so on. This scenario has changed as the computers
become smaller, cheaper and faster as they are
today. However, what was a real need in the past is
employed today as if there was no other way to
interact with computers. In fact, we are nowadays
operators – all of us using some kind of computer
(desktops, palmtops, and mobile phones). We are
trained today to learn how to pull virtual buttons the
same way the former operators were trained to pull
real buttons in real panels on those old mainframes.
This aspect has consequences and the program
concept is the main one. A program could be
thought as the programmer’s hands virtually
extended inside our machines. The programmer has
the knowledge about some specific domain and
knows how to establish the correct sequence of steps
in order to solve the problem. In this scenario, we
are users of such routines – in other words:
operators. Programs, within this context, are the way
through which programmers can implement their
procedural knowledge about the problem’s domain.
MACHINE BIOLOGICAL CLOCK - The Time Dimension in a Organic-based Operating System
77

This model does not enable the actual operating
system to acquire knowledge about what is
happening inside the machine. We believe that this
is one of those several sources of problems that we
experience today. So, we have proposed a new
model.
3 A KNOWLEDGE-BASED OS
The novel concept introduced in Mattos (2003) says
that a knowledge-based operating system is: “an
embodied, situated, adaptive and autonomic system
based on knowledge abstraction which has identity
and intelligent behavior when executed”.
The whole system is built inside a shell which
gives the endogenous characteristic. A hyper
dimensional world model (Mattos, 2005) enables the
entire system to perceive evolving and/or fluctuating
execution conditions (fig. 1).
Figure 1: Hyper-dimensional World Model.
3.1 The Dimensions
We have identified 3 dimensions over which such a
new operating system paradigm has to be based: (i)
Physical dimension, (ii) Logical dimension, and (iii)
Temporal dimension.
The physical dimension describes the physical
components and their structural relationship.
The logical dimension describes the functional
characteristics of each physical component. It is
called: physical context of a device. A state machine
describes the dynamic aspects of the component’s
behavior. Merging the entire physical context of all
physical devices described at the physical
dimension, we obtain the world’s physical context
(WPC). The logical dimension is provided by a
DEVS run-time environment (Mattos, 2005b).
The Time Dimension is provided in order to
enable the entire system to perceive the time flow –
as a biological clock in human beings.
3.2 Knowledge based OS
and Knowledge Acquisition
Some works (Samsonnet et al, 1982; Vilensky,
Arens and Chin, 1984; Chikayama, 1988; Genera
2003; Larner, 1990; Yokote, 1992; Li et al, 1995;
Patki, Raghunathan and Khurshid, 1997) have been
described as aiming to develop a complete
knowledge-based operating system. Other
approaches consists of applying IA techniques
through making kernel implants (Seltzer, Small and
Smith, 1995) in order to get better user interfaces in
traditional operating systems (Pasquale 1988;
Cockcroft,1995; Hernández, Vivancos and Botti
1998; Zomaya, Clements and Olariu, 1998; Kandel,
Zhang and Henne, 1998; Siraj, Bridges e Vaughn,
2001). However, all of them have failed into
achieving their objectives because the main concept
over which they should base their work has not been
clearly specified – “what” is the knowledge. This
aspect has transformed those supposed new
operating systems projects into traditional operating
systems architectures with many specialized libraries
over some multitasking platform.
Knowledge in this context is conceived as being
a set of logical-algebraic operational structures that
makes possible to organize the system functioning
according to interconnection laws and behavior
laws. It is well known that a significant obstacle to
the construction of knowledge-based systems is the
process of knowledge acquisition.
The key to this process is how we may
effectively acquire the knowledge that will be
implemented in the knowledge base. In an operating
system environment, this is not an easy task. It is
usually done by hooking the OS API calls and
recording logs for further analysis. This is a time and
resources consuming process. The main drawbacks
to this approach are: (i) the information gathering
process impacts the overall performance, influencing
other applications that aren't involved in the
application context being considered; (ii) this impact
on performance also interferes with the application
being considered; and (iii) this scenario is probably
different from that of where the application was
developed.
BIODEVICES 2008 - International Conference on Biomedical Electronics and Devices
78
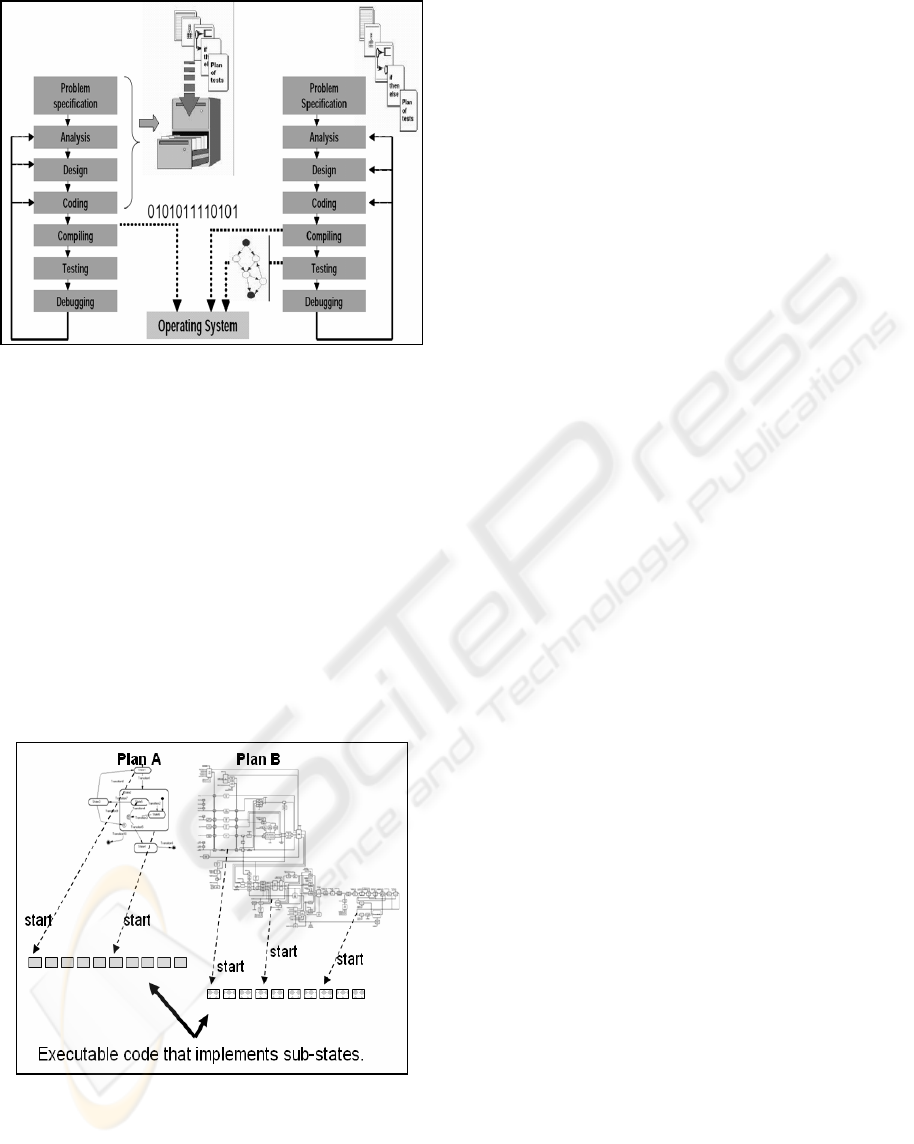
Figure 2: (a) General framework (b) Proposed framework.
3.2.1 Learning Phase
Figure 2a shows the traditional application life-cycle
characterizing that the documentation produced
during the analysis and design, in general, is stored
in folders after the implementation phase is
concluded. The traditionals operating systems
usually receives only binary code to manage.
In our approach, the development process must
be oriented by the application dynamics. As a
prerequisite, a KBOS environment establishes that
each application developed must have (i) a state-
machine that describes all dynamic behaviour and
(ii) the source-code associated (Figure 2b).
Figure 3: Plans registering relative starting time for each
sub-plans or sub-states.
This is the input for our system to learn about the
application’s intentions and to generate the
executable code. When the KBOS runtime
environment receives a new application state-
machine, it starts a procedure to convert sub-states
and portions of source-code into execution plans.
Those execution plans are built in a parallel
functional decision trees format and constitutes the
executable code that KBOS recognizes.
The knowledge at OS level emerges from a
library of execution plans and from the system’s
experience in running those plans.
Figure 3 shows an example with two plans A and
B. Each plan has its own sub-state architecture
(according to their particular purpose). Each sub-
plan is implemented by a set of machine instructions
(executable code). The time needed to execute each
sub-state is determined during the software test
phases by the development team and delivered with
the software (including the state machines –
dynamic model of the software).
4 BIOLOGICAL CLOCK
According to Siegel (2006), living organisms
evolved an internal biological clock, called the
circadian rhythm, to help their bodies adapt
themselves to the daily cycle of day and night (light
and dark) as the Earth rotates every 24 hours. The
term 'circadian' comes from the Latin words for
about (circa) a day (diem). Circadian rhythms are
controlled by "clock genes" that carry the genetic
instructions to produce proteins. The levels of these
proteins rise and fall in rhythmic patterns. These
oscillating biochemical signals control various
functions, including when we sleep and rest, and
when we are awake and active. Circadian rhythms
also control body temperature, heart activity,
hormone secretion, blood pressure, oxygen
consumption, metabolism and many other functions.
A biological clock has three parts: a way to
receive light, temperature or other input from the
environment to set the clock; the clock itself, which
is a chemical timekeeping mechanism; and genes
that help the clock control the activity of other
genes. (Siegel, 2006)
In the last few decades, scientists have
discovered the genes responsible for running the
internal clocks: period (per), clock (clk), cycle (cyc),
timeless (tim), frequency (frq), double-time (dbt)
and others. Genes that control circadian rhythms
have been found in organisms ranging from people
to mice, fish, fruit flies, plants, molds and even
single-celled, blue-green algae known as
cyanobacteria. (Siegel, 2006)
The master circadian clock that regulates 24-hour
cycles throughout our bodies is found in a region
MACHINE BIOLOGICAL CLOCK - The Time Dimension in a Organic-based Operating System
79

called the suprachiasmatic nuclei (SCN) in the
hypothalamus of the brain. The SCN is made up of
two tiny clusters of several thousand nerve cells that
"tell the time" based on external cues, such as light
and darkness. The SCN regulates sleep, metabolism,
and hormone production (Siegel, 2006).
The SCN is believed to synchronize "local"
clocks in organs and tissues throughout the body,
either through hormones or changes in body
temperature. Gene-operated clocks independent
from the brain's master pacemaker have been found
in the liver, lung, testis, connective tissue and
muscle (Siegel, 2006).
4.1 Perception of Time
People and other animals are able to perceive the
duration of intervals between events, and the
accuracy of their perceptions can be assessed. In
situations in which there are many different time
intervals, these can be combined for the assessment
of the typical interval. Associative learning is
dependent upon time perception, and the
mechanisms of time perception involve an internal
clock (Church, 2006).
According to Craft (2000), “we take it for
granted that each experience takes place in a
continuum of time. In the course of the daily routine
one rarely, if ever, stops to notice as such the
passing of physical and psychological events while
they happen. But each passing moment, noticed or
unnoticed, is a successive instance of the ‘now’ that
marches on into a presumably infinite past that we
construct in memory. By extension, we anticipate a
succession of future ‘now’ moments that have yet to
come. In this process we meld our “experience of
heterogeneous events into a coherent sense of
persistence” (Flaherty, 1999 apud Craft, 2000).
It has been physically hypothesized that
biological processes and environmental factors
provide cues through which we construct our
perception of temporality. It has been suggested that
there is some sort of “biological clock” that
regulates our perception of time. This is not to be
confused with the more commonly known
“circadian” rhythms which have been usually
observed in most living things. Flowering plants,
bees and other animals demonstrate the existence of
internal or innate timing mechanisms in their
blossoming and movement patterns. Although much
attention has been given to these patterns in human
subjects, more notably in the isolation studies of
Aschoff and Weaver, such circadian clocks are not
likely to be involved in human time perception on
the fine scale of minutes and seconds (Campbell,
1990 apud Craft 2000).
The concept of ordered time, the fixed intervals
of minutes and seconds, and the synchronicity
between 10 minutes on the clock and the same
amount of time in lived duration is, at least partially,
a socialized phenomenon (Flaherty, 1991 apud
Craft, 2000).
5 THE TIME DIMENSION
In the current paradigm of computing systems, the
time is a variable that has to be explicitly read in
order to enable software entities to perceive the time
flow. It implies that if the program does not read that
variable, it will not be able to perceive the time flow.
In a KBOS system, the time flow is part of the
system and it is implemented in two phases: (i) by
establishing units of time flow perception and (ii) by
time-stamping the state machine that drives the
executable code (in KBOS run-time environment
executable code is implemented as parallel
functional decision trees) with that information.
The first phase makes possible the creation of a
kind of “machine biological clock” (MBC) concept
– a time unit that the whole system can perceive as
flowing and that is different from the time-slice
concept as adopted in multitasking based operating
systems today. The second phase enables parts of
code to perceive time without the need of explicitly
reading clock variables.
Figure 4 shows the situation in which one of the
sub-states of plan A at the second MBC unit
perceives that its sub-state is delayed in comparison
with the original situation presented by the figure 3.
Figure 4 also shows that hardware events (time ticks
from real-time clock and other hardware events from
mouse, hard disk and network card) demand specific
plans to be executed (fig. 5).
The MBC makes possible to introduce another
concept: the work capacity (WC) of a machine. This
concept is related to the amount of work a machine
can do in some BMC and introduces the capacity of
a system to perceive if it is becoming overloaded or
not.
Figure 6a shows an example of a program that is
time dependent. In general, the program needs to
call the getTime API in order to discover the current
time and make some calculation to discover if it is
delayed, on time or ahead of time. Also, in general,
only some portions of the code running in a system
have to deal with such constraints so we have a mix
of code dealing with time and code that was not
BIODEVICES 2008 - International Conference on Biomedical Electronics and Devices
80
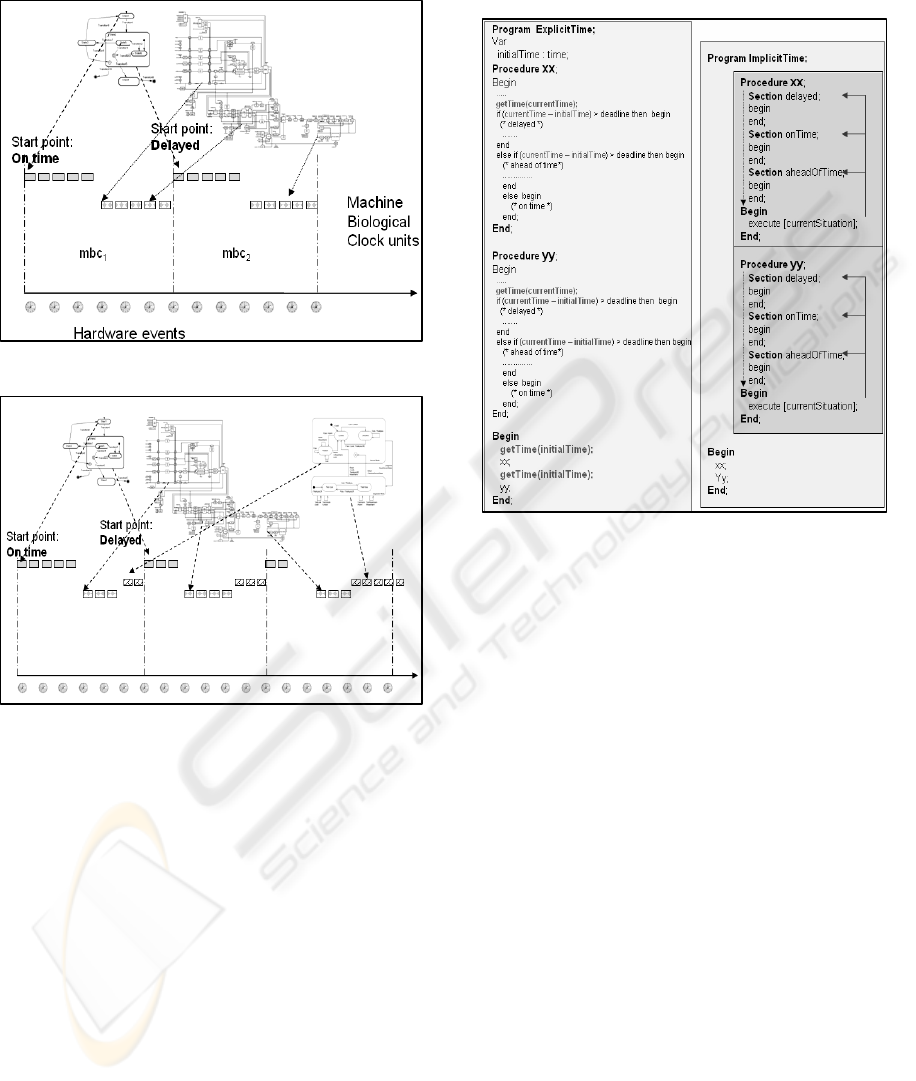
conceived to deal with time running together on the
same environment.
Figure 4: Plans A and B perceiving delays.
Figure 5: Plans A, B and C perceiving delays.
Figure 6b shows how a plan (in KBOS context)
should be developed: each procedure/function has to
explicitly declare sections where the time dimension
has to be considered as a functional requisite. During
the execution time of that plan, the system activates
the appropriated section (delayed, onTime or
aheadOfTime) according to the situation of that
plan. If the developer do not know what to do in
some situation, he can explicitly use an
IDoNotKnowWhatToDo clause and the KBOS run-
time will take appropriate actions.
The time dimension also makes possible to
introduce the notion of space concept. In other
words, if two different plans perceive that both are
delayed it is equivalent to say to each one that there
is someone else sharing resources within the same
MBC unit. It leads the logical path of some plan to
be changed to another path that implements the same
functionality but demands less resources. The self-
adaptive and self-reconfigurable characteristic of the
system is based on this facility.
Figure 6: (a) Explicit time (b) implicit time.
5.1 Identity and Intelligent Behaviour
A KBOS framework enables to introduce the
identity concept, which is resultant from the
embodiment, situatedness, adaptiveness and
autonomy characteristics. This leads to an
emergence concept. According to Muller-Schloer
(2004), emergence is defined as a property of a total
system which cannot be derived from the simple
summation of properties of its constituent
subsystems. Emergent phenomena are characterized
by (i) the interaction of mostly large numbers of
individuals (ii) without central control with the result
of (iii) a system behavior, which has not been
explicitly “programmed” into the individuals.
In this sense, the set of characteristics enables
the system to perceive, in an individualized manner,
a set of events occurring in some instant of time.
Thus, the intelligent behavior emerges from the
previous characteristics plus the relationship
between the system and the surrounding
environment
.
MACHINE BIOLOGICAL CLOCK - The Time Dimension in a Organic-based Operating System
81

6 RELATED WORK
Stulp and Beetz (2006), proposed a novel
computational model for the acquisition and
application of action awareness, showing that it can
be obtained by learning predictive action models
from observed experience and also demonstrating
how action awareness can be used to optimize,
transform and coordinate underspecified plans with
highly parametrizable actions in the context of
robotic soccer. The system works in two moments:
(a) idle time when the agent learns prediction
models from the actions in the action library and, (b)
during operation time, when action chains are
generated.
Tannenbaum (2007) argues that self-awareness
means learned behaviors that emerge in organisms
whose brains have a sufficiently integrated, complex
ability for associative learning and memory.
Continual sensory input of information related to the
organism causes its brain to learn its (the
organism’s) physical characteristics, and produce
neural pathways, which come to be reinforced,, so
that the organism starts recognizing, several features
associated to each reinforced pathway. The self-
image characteristic provides a mechanistic basis for
the rise of the concept of emergency of behavior
that, on its turn, is connected to the concepts of self-
awareness and self-recognition. On the basis of all
that process there is the notion of time perception.
7 CONCLUSIONS AND FURTHER
WORK
We have briefly given an overview of an
endogenous self-adaptive and self-reconfigurable
approach to operating system design and introduced
the MBC concept. The main aspect to be pointed out
is that there is no separation between what is known
as operating system and what is known as
application programs in today’s paradigm.
In a KBOS environment all the executable code
takes part into the system and all the code has the
ability to perceive the time flow. This perception
enables the whole code to execute self-adaptation
without explicitly demanding routines.
REFERENCES
R.J.Brachman. Systems That Know What They’re Doing.
IEEE- Intelligent Systems. Nov/Dec 2002. pp.67-71.
T.Chikayama. Overview of the Parallel Inference Machine
Operating system (PIMOS). Proc. Of the Intl.
Conference of Fifth Generation Computer Systems.
Pp. 230-235. 1988.
R.M.Church. Time Perception. Encyclopedia of Cognitive
Science. John Wiley & Sons, Ltd. 2006.
A.Cockcroft. New release of the SE Performance Toolkit.
March 1995. Available in
www.sun.com/960301/columns/adrian/ column7.html,
March 1995.
B.Craft. Twitch of the Snooze Button: Time Perception
and Cognition in Humans. Submitted in partial
fulfillment of the requirements for HCI 450, DePaul
University. January 31, 2000.
Genera Concepts: The Best Software Environment
Available. March 2003. Available in http://kogs-
www.informatik.uni-hamburg.de/~MOELLER/
symbolics-info/GENERA/genera.html.
R.Hayes-Roth. Puppetry vs. Creationism: Why AI Must
Cross the Chasm. IEEE Intelligent Systems.
September/October 2006; 21(5):7-9.
L.Hernández,E.Vivancos,V.Botti. Intelligent Scheduling
of Production Systems in a Real-Time Architecture.
IBERAMIA’98,1998,p429-438.
A.Kandel,Y.Zhang, M.Henne. On use of fuzzy logic
technology in operating systems. Fuzzy Sets and
Systems 99, Elsevier Science, pp 241-251, 1998.
Larner,D.L. A Distributed, Operating System Based,
Blackboard Architecture for Real-Time Control.
CACM. 1990.
R.Linde. Operating Systems Penetration. AFIPS Conf.
Proceedings, Vol 44, 1975.
M.M.Mattos. Main Concepts to Build Knowledge-Based
Operating Systems. Doctoral thesis. UFSC-
Universidade Federal de Santa Catarina, Brasil,
Novembro, 2003. (In Portuguese)
M.M.Mattos. Next Generation of Operating Systems
Design Based on Knowledge Abstraction. In:
Proceedings of the IADIS International Conference on
Applied Computing. Algarve, Portugal. 2005.
M.M.Mattos. KBOS Run-Time Environment Based on
DEVS Formalism. In: Proceedings of the IADIS -
International Conference on Applied Computing.
Algarve, Portugal. 2005.
C.Müller-Schloer. Organic computing: on the feasibility of
controlled emergence. In Proceedings of the 2nd
IEEE/ACM/IFIP international Conference on
Hardware/Software Codesign and System Synthesis
(Stockholm, Sweden, September 08 - 10, 2004).
CODES+ISSS '04. ACM Press, New York, NY, 2-5.
DOI= http://doi.acm.org/10.1145/1016720.1016724.
A.B.Patki , G.V.Raghunathan ,A.Khurshid. FUZOS—
Fuzzy Operating System support for Information
Technology. Proceedings of Second On-line World
Conference On Soft Computing In Engineering,
Design And Manufacturing. Cranfield University, UK,
June 1997.
J.Pasquale. Using Expert Systems to Manage Distributed
Computer Systems. IEEE Network. Set.1988.
BIODEVICES 2008 - International Conference on Biomedical Electronics and Devices
82

J.P.Sansonnet,M.Castan,C.Percebois,D.Botella,J.Perez.
Direct Execution of LISP on a List Directed
Architecture. Proceedings of ASPLOS. Palo Alto,
Califórnia, March 1982, pp. 132-139.
M.Seltzer,C.Small,K.Smith. The Case for Extensible
Operating Systems. Harward Computer Center for
Research in computing Technology -Technical Report
TR-16-95 Depto. Of Computer Science, Harward
University. 1995.
L.J. Siegel. The Time of Our Lives. Learn.Genetics –
Genetic Science Learning Center. The University of
Utah. In: learn.genetics.utah.edu/features/clockgenes.
2006.
A.Siraj.,S.Bridges,R.Vaughn. Fuzzy Cognitive Maps for
Decision Support in Intrusion Detection Systems.2001.
Available in http://www.sc.msstate.edu/~security/iids/
publications/nafips_ifsa_2001.htm.
F. Stulp and M. Beetz. Action awareness – enabling
agents to optimize, transform, and coordinate plans.
In Proceedings of the Fifth International Joint
Conference Autonomous Agents and Multiagent
Systems (AAMAS), 2006.
W. J. Schwartz. President’s Welcome. In Proceedings of
the Tenth Meeting of Society for Research on
Biological Rhythms, Sandestin, FL. May 21–25, 2006.
E.Tannenbaum. Speculations on the emergence of self-
awareness in big-brained organisms. Jun 2007.
Available in http://eprintweb.org/S/article/q-
bio/0701017.
R.Vilensky,Y.Arens,D.Chin. Talking to Unix in English:
An Overview of UC. CACM 17,6,pp.574-593, Junho
1984.
Y.Yokote. The Apertos Reflective Operating System: The
Concept and Its Implementation. Proceedings of
OOPSLA’92, ACM Sigplan Notices, v. 27, pages
414–434, 1992.
A.Zomaya,M.Clements, S.Olariu. A Framework for
Reinforcement-Based Scheduling in Parallel
Processor Systems. IEEE Transactions on Parallel and
Distributed Systems. V9, N3,p249-260,Mar 1998.
MACHINE BIOLOGICAL CLOCK - The Time Dimension in a Organic-based Operating System
83
