
SMART DIELECTRIC ELASTOMERS
AND THEIR POTENTIAL FOR BIODEVICES
Todd A. Gisby, Iain A. Anderson
Biomimetics Laboratory, Auckland Bioengineering Institute, The University of Auckland, Level 6, 70 Symonds Street
Auckland, New Zealand
Emilio P. Calius
Industrial Research Limited, P.O. Box 2225, Auckland, New Zealand
Shane Xie
Mechatronics Engineering, Department of Mechanical Engineering, The University of Auckland, New Zealand
Keywords: Dielectric Elastomers, Artificial Muscles.
Abstract: Dielectric Elastomer (DE) actuators are compliant, ultra light-weight electromechanical devices that can be
used as actuators, sensors, and power generators. While a relatively new technology, DE actuators can be
produced using biocompatible materials and have already exhibited excellent performance in terms of
strain, speed, pressure, specific energy density, and efficiency when compared to conventional actuation
technologies and natural muscle. Further research is required in order for promising laboratory results to be
translated into real-world applications, particularly in the areas of modelling and control, but the potential
for multiple functions to be integrated into a single element is an exciting prospect for flexible smart
structures and biodevices.
1 INTRODUCTION
Dielectric Elastomer (DE) actuators are compliant,
ultra-light weight electromechanical devices that are
emerging as an attractive emerging technology for a
range of biomedical applications. They are
fabricated from inexpensive biocompatible polymers
that have highly tuneable material properties. They
are also scale invariant, operate silently and
efficiently over a range of speeds, and are capable of
being used not only as actuators, but also as sensors
and power generators (Kornbluh, 2004).
DE actuators have demonstrated remarkable
performance characteristics in terms of active stress,
strain, strain rate, energy density and
electromechanical efficiency. Their unique
properties offer a number of advantages with respect
to weight, scalability, and simplicity of design over
conventional transducer technologies such as
electrostatics, piezoelectrics, electromagnetics, and
shape memory alloys (Bar-Cohen, 2004; Kornbluh
et al., 2004; Madden et al., 2004). They also
compare very favourably with human skeletal
muscle (Hunter and Lafontaine, 1992).
Table 1 compares the key performance figures of
DE actuators with those of other tranducer
technologies. While it is apparent that DEs do not
excel in every category, it is clear that their key
strength lies in their excellent overall performance.
2 DIELECTRIC ELASTOMER
OPERATING PRINCIPLE
2.1 Basic DE Structure
A DE actuator is a compliant capacitor consisting of
an incompressible soft polymer membrane dielectric
with compliant electrodes applied on both sides.
When used as an actuator, the charge
accumulated on the electrodes when a voltage is
285
A. Gisby T., A. Anderson I., P. Calius E. and Xie S. (2008).
SMART DIELECTRIC ELASTOMERS AND THEIR POTENTIAL FOR BIODEVICES.
In Proceedings of the First International Conference on Biomedical Electronics and Devices, pages 285-290
DOI: 10.5220/0001054702850290
Copyright
c
SciTePress

Table 1: Actuator Technology Comparison.
*figures taken for a VHB dielectric membrane (see section 2.4). Stress, strain, strain rate and energy density figures vary
depending on membrane material.
applied gives rise to electrostatic forces that generate
deformation in the DE. The opposite charges act to
draw the positive and negative electrodes together
while the like charges on each electrode act to
expand the area of the electrode. When the charge is
removed, the elastic energy stored in the dielectric
returns it to its original shape (Fig. 1). The linear
motion produced by this electromechanical response
can be used for actuation purposes.
Figure 1: Deactivated (left) and activated (right) states of a
simple DE actuator.
2.2 Pressure Capabilities
DEs are driven by electric fields. The pressure that
can be generated in a DE is widely accepted to be
defined by the following equation (Kofod, 2001):
P = ε
r
ε
0
(V/d)
2
(1)
Where P is the electrostatic Maxwell pressure, ε
r
is the relative permittivity of the dielectric material,
ε
0
is the permittivity of free space (ε
0
= 8.854 x 10
-12
F/m), V is the voltage and d is the thickness of the
dielectric membrane. This is twice the pressure
generated by a rigid plate electrostatic device due to
the addition of the area expansion to thickness
compression upon activation. The level of
deformation achieved at any given electric field is
dependent on the combined stiffness of the polymer
dielectric and electrode materials. The peak field
that can be applied is limited by the dielectric
breakdown strength of the DE membrane.
2.3 Power Generation
The phase difference between the electrical and
mechanical stimulus applied to a DE determines
whether it acts as an actuator or a generator. When
the mechanical deformation leads the electrical
excitation the DE will generate electrical power.
The electrical charge stored on a DE device (Q),
the capacitance of the device (C), and the voltage
difference between the electrodes (V) are related by
the following equation:
Q = CV (2)
And the electrical energy, e
electrical
, stored in the
DE is defined by:
e
electrical
= ½CV
2
(3)
Assuming, for simplicity, charge is kept constant
(i.e. the DE is electrically isolated) work done by an
external force acting to increase the separation
between the electrodes against the electrostatic
forces is converted to electrical energy and stored in
the DE. This is because the capacitance of the device
will decrease as the electrode separation increases
and the electrode area decreases, thereby causing the
voltage to increase. As the electrical energy stored in
the DE is related to the voltage squared a net
increase in the electrical energy is achieved; energy
that can then be used to power other electrical
devices.
2.4 Materials
Silicone and polyacrylate polymers have garnered
much attention in the field of DE research due to
their highly elastomeric nature and high breakdown
strengths. Silicones typically exhibit low viscous
Characteristic DEA*
(Madden et
al., 2004)
Skeletal
Muscle
(Hunter and
Lafontaine,
1992)
Piezoelectric
(Kornbluh et
al., 2004)
Electro-
magnetic
(Kornbluh
et al.,
2004)
Electrostatic
(Kornbluh
et al., 2004)
Shape Memory
Alloy
(Hunter and
Lafontaine,
1992)
Stress (MPa) 7.7 0.35 131 0.1 0.03 200
Strain (%) 380 >40 1.7 50 50 5
Relative Strain Rate Medium Medium Fast Fast Fast Slow
Energy Density (kJ/m
3
) 34,000 40 0.13 0.003 0.003 10,000
Efficiency (%) 60-80 35 >90 >90 >90 2-3
BIODEVICES 2008 - International Conference on Biomedical Electronics and Devices
286
losses and some can operate in temperatures ranging
from -100ºC to 260ºC, making them well suited to
dynamic, high speed applications in harsh
environments. Their availability in monomer form
(e.g. NuSil CF19-2186, Dow Corning Sylgard 184)
enables the tuning of material properties (e.g.
stiffness, elongation at break, and geometry) and
facilitates the creation of silicone based composites
through the incorporation of additional material
prior to polymerization.
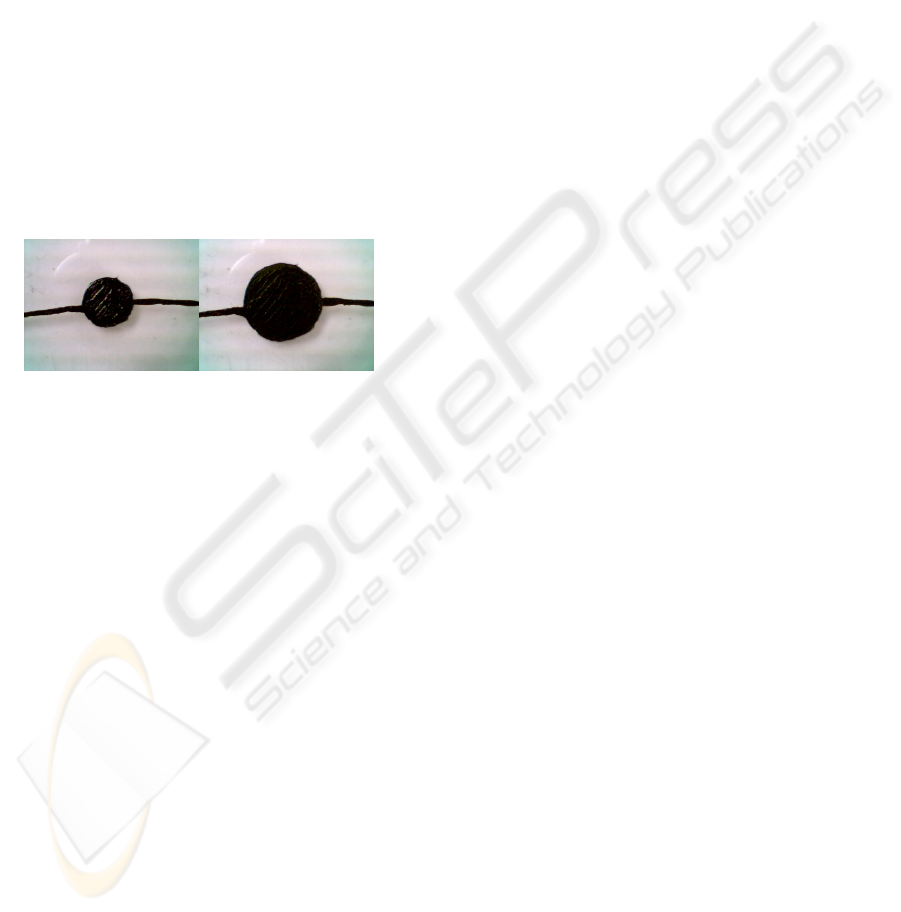
3M’s commercially available VHB4905 double-
sided polyacrylate tape has a high degree of
viscoelasticity, but at low speeds is capable of the
highest reported active displacement (380%) and
energy density (3.4MJ/m
3
) of any DE polymer. Fig.
2 illustrates a simple, easily fabricated DE made
from a prestrained, partially electroded VHB
membrane at rest (Fig. 2 left), and activated with an
electric field of 252V/µm (Fig. 2 right). The
electroded area expands by 125% at this field.
Figure 2: A VHB DE actuator at rest (left), and actuated
with an electric field of 252V/µm (right).
While silicone and VHB4905 are popular choices
for DE materials, a wide variety of other materials
can be used and which is appropriate is highly
dependent on the application. It is convenient
therefore to define a relationship between the key
properties of a material that results in an index value
that can then be used to compare materials. The DE
“Figure of Merit” relates a material’s dielectric
constant (ε
r
), the breakdown strength (E
b
), and the
Young’s modulus (Y), using the following formula
(Sommer-Larsen and Larsen, 2004):
Figure of Merit. = 3ε
r
E
b
2
/Y (4)
It is important to note that typical polymers with
suitably low stiffness and high dielectric breakdown
strengths have low dielectric constants (typically
<5). Substituting this value into Equation (1) it is
clear that high electric fields (~50-150V/μm) are
required to generate enough pressure to deform a DE
more than a few percent.
3 DIELECTRIC ELASTOMERS
IN BIODEVICES
DEs acting either in an actuator, sensor, or power
generator mode show great promise for a number of
biomedical applications. The key strength of DE
technology however is the ability for a single
lightweight device to operate in multiple modes.,
thereby reducing device volume, complexity, and
component count. This ability, coupled with their
biocompatibility, opens up a number of possibilities
not only for implantable or prosthetic devices, but
also for tools to assist both surgeons and patients
during operative and post-operative procedures.
3.1 Artificial Muscles
With performance metrics that exceed that of natural
muscle, DEs show great promise as artificial
muscles. Like natural muscle, DEs can be controlled
in terms of position, speed and stiffness. Controlling
the charge stored on a DE results in stable position
control. By controlling the rate of charging the speed
of actuation can be controlled. Similarly, utilising
the geometry of the device and the level of charge
stored on the DE, it is possible to determine the
electroactive forces, which in conjunction with
knowledge of the mechanical behaviour of the DE
itself, can be used to control stiffness.
To achieve accurate control in terms of any these
parameters it is necessary to obtain feedback data
from which a physical aspect of the device can be
inferred. Conventionally an external sensor is
required to obtain this data but applying such an
approach to DEs adds to the complexity, volume,
mass, cost and power requirements of the device.
Instead, self-sensing using inherent characteristics of
the DE eliminates the constraints an external sensor
implies and enables the creation of entirely
compliant smart devices. Such devices, with an
overall texture and consistency comparable to
natural muscle, will have a natural look and feel; a
factor that has been found to have a significant
impact on patient acceptance of such devices
(Popovic et al., 2002).
DE device properties such as electrode resistance
(O'Brien et al., 2007), capacitance (Toth and
Goldenberg, 2002), and electrical current (Bauer and
Paajanen, 2006) have all been used to infer the
physical state of a DE actuator subject to specific
operating conditions. As self-sensing develops
further and the richness of the feedback information
increases, so too will the accuracy with which DE
devices can be made to respond to a control signal.
SMART DIELECTRIC ELASTOMERS AND THEIR POTENTIAL FOR BIODEVICES
287

In the case of artificial muscles this control signal
should be derived from human nerve signals, and
already basic proportional control of a DE device
has been achieved with the magnitude of a variety of
electrophysiological signals as the input signal
(Carpi et al., 2006). Further development of not only
artificial muscles but also of the human-device
interface, including enabling bi-directional
information flow between artificial muscle and
human, could eventually lead to a true artificial
muscle capable of being fully integrated into the
human body.
3.2 Bio-sensors
Self-sensing and the ability of a DE device to
convert mechanical energy into electrical energy
enable DEs to be used in the monitoring of various
biological functions. As discussed previously,
various electrical characteristics of a DE will change
when the DE is deformed from its rest state. These
characteristic features have been used to
demonstrate simple, highly compliant, low voltage
strain and pressure sensors (Kornbluh, 2004).
The highly tuneable nature of the mechanical
impedance and elongation of DE sensors can be
exploited to enable strains of several hundred
percent to be monitored without adding significant
mechanical resistance to the movement itself. This
would make them suitable for devices that monitor
activities such as respiration, muscle movement, or
limb articulation. For monitoring muscle movement
in particular, feedback data from lightweight
conformable sensors synchronised with relevant
electrophysiological signals could be used to analyse
the dynamic stress-strain-time behaviour of muscles.
Biocompatible DE sensors could also potentially be
used to monitor stresses/strains in vivo, whether this
is in conjunction with another implanted device or
simply to generate data that a sensor external to the
body would be incapable of providing.
3.3 Surgical Tools
Compliant smart devices offer an ideal solution for
procedures where “soft” manipulation is appropriate.
In invasive surgeries such as endoscopic procedures,
DE devices could fulfil multiple roles: they could
operate as a multiple-degree-of-freedom actuator for
directing/propelling sensory devices or fibre-optic
cables whilst also providing a compliant interface
between the patient and the device that serves to
protect both.
Lightweight accurate sensors and actuators could
be incorporated into portable glove-type devices
with built in force feedback for surgical training or
performing remote surgery. Already a prototype
device has been devised that has been used to
provide force feedback for a virtual reality
simulation of grasping an object (Fig. 3)(Zhang et
al., 2006). Low device mass and volume would
ensure the device is portable and able to be used for
extended periods without user fatigue.
Figure 3: Lightweight compliant actuators for virtual
reality feedback of grasping related hand gestures.
Furthermore, a smart device with the dexterity
and flexibility of a human hand could be used as the
manipulator in remote surgical operations. With
feedback from pressure sensors embedded in the
manipulator used as a control input for a DE force
feedback device a complete DE solution could be
created. An inherently muscle like actuator
combined with realistic haptic feedback would result
in an apparatus with an intuitive feel that could offer
advantages in terms of flexibility and patient safety
in comparison to heavy and rigid surgical robots
driven by electromagnetics or hydraulics.
Other features of DE actuators such as their low
current requirements and non-magnetic nature also
provide advantages with regard to surgical tools. A
prototype serpentine, DE based manipulator for
needle positioning in close proximity to an MRI
machine has been developed (Fig. 4)(Plante, 2006).
Similar devices incorporating ferromagnetic
materials or that use high currents would degrade the
quality of the MRI scan.
Figure 4: A conceptual design for a serpentine needle
positioning device.
BIODEVICES 2008 - International Conference on Biomedical Electronics and Devices
288
In the longer term there is the possibility of using
nanoscale DE actuators in biology to stimulate the
growth, migration and differentiation of stem cells.
Mechanically deforming these cells can expose or
activate different functional sites on their proteins,
thereby affecting the biochemical reactions and
intracellular pathways that ultimately regulate cell
development (Vogel, 2006). Such a process may
even create new opportunities for the treatment of
diseases associated with mechanical cell dysfunction
such as cancer, cardiac hypertrophy, genetic
malformation, and immune disorders.
3.4 Power Generators
DEs are capable of operating as highly efficient
generators. With appropriate driving circuitry DEs
can be used to harvest energy from vibrations and
motions inherently present in the environment.
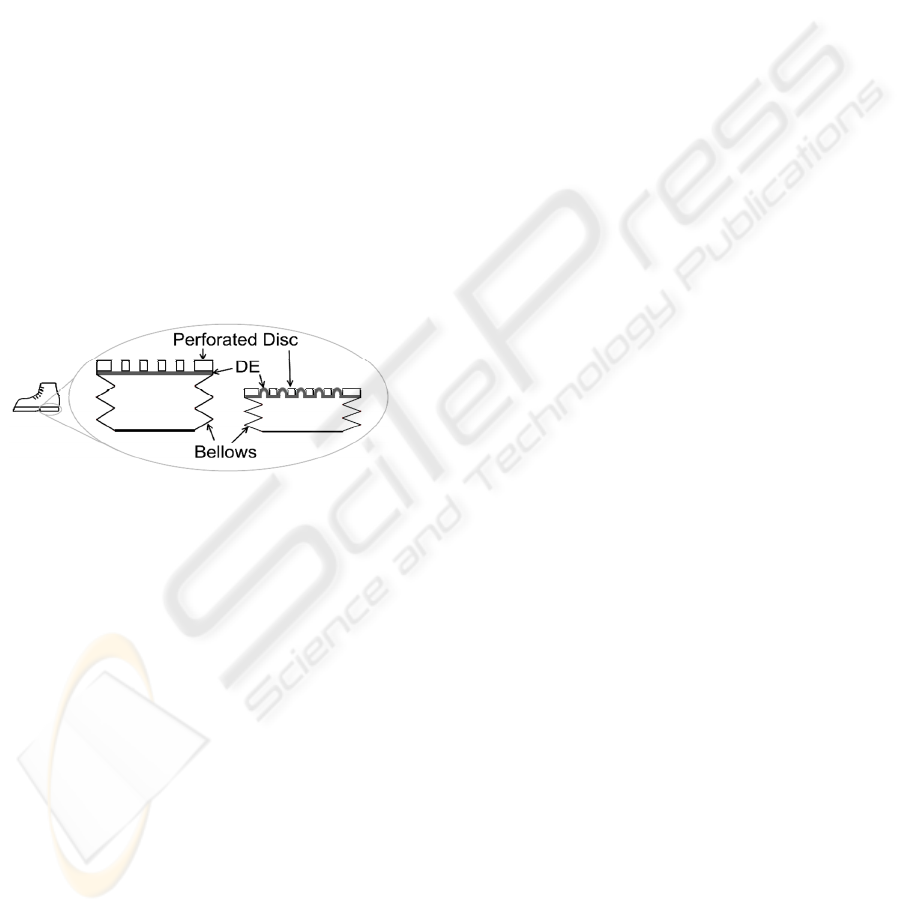
Already a heel-strike generator embedded in the heel
of a boot (Fig. 5), is capable of generating up to 1W
by using the downwards pressure of each footfall to
stretch a DE membrane (Kornbluh, 2004).
Figure 5: Heel strike generator capable of generating up to
1W.
The implication for biodevices is that lightweight
power generators could be used to trickle charge or
perhaps even directly power other low power
devices on or within the body. A DE based
prosthetic device subjected to intermittent usage
patterns could make use of a DE generator combined
with an energy storage device such that it would
need recharging less frequently, if at all.
Alternatively the energy storage device (e.g. battery
pack) could be downsized.
The conformable and compact nature of DE
generators means initially they could be strategically
integrated into fabrics so as to take advantage of
naturally occurring stretching as a result of human
ambulation. In the future these generators may
eventually be able to be implanted within the body
itself, enabling a completely encapsulated, low
maintenance power supply. Such a generator could
be used to power wireless implantable sensors.
4 FUTURE DIRECTIONS FOR
DIELECTRIC ELASTOMERS
As a smart material, a single DE element offers a
multi-functional platform from which devices suited
to a variety of applications can be developed. There
are a number of hurdles yet to be overcome however
and at the Biomimetics Laboratory we are actively
investigating key issues that are currently limiting
the practical implementation of DEs in biodevices.
DEs exhibit complex non-linear and hysteretic
behaviours in both the mechanical and electrical
domains that make modelling and precision control
of these devices difficult. Current models can
accurately predict behaviours based on specific
parameters (e.g. the instantaneous uniaxial stress-
strain response of a material subjected to a constant
strain rate deformation), but have such a narrow
scope that their accuracy degrades significantly if
one or more of the parameters change (e.g. strain
rate, mode of deformation, external loads,
temperature). The ability to accurately describe the
transient response of a DE device is especially
limited. Improved modelling, particularly with
respect to the electrical subsystem will greatly
facilitate the development of more robust devices.
Improved modelling and self-sensing techniques
will result in an increased understanding of the
behaviour of a DE system that will greatly facilitate
optimisation in terms of control, feedback, and
device efficiency. In artificial muscles especially,
owing to the desirability of ultra-thin dielectrics,
devices will consist of large arrays of
micro/nanoscale DE actuators in order to amplify
force and displacement. It will be of critical
importance therefore to develop a balance between
the volume of feedback information and the control
methodology such that the computational
requirements are not prohibitively high.
The use of high electric fields (~50-150V/µm) in
DEs also presents an issue given that current
prototype membrane thicknesses typically range
from 10μm to 50μm. While this is primarily a
limitation of current fabrication techniques it
nevertheless necessitates operating voltages in the
kilovolt range. The impact of these high electric
fields in proximity to the human body, including the
efficacy of a soft polymer insulative layer
encapsulating the device is being investigated.
SMART DIELECTRIC ELASTOMERS AND THEIR POTENTIAL FOR BIODEVICES
289

ACKNOWLEDGEMENTS
Work at the Biomimetics Laboratory is partly
funded by the University of Auckland’s VCUDF.
REFERENCES
Bar-Cohen, Y., Ed. (2004). Electroactive Polymer (EAP)
Actuators as Artificial Muscles: Reality, Potential, and
Challenges. Bellingham, WA, SPIE Press.
Bauer, S. and M. Paajanen (2006). Electromechanical
characterization and measurement protocol for
dielectric elastomer actuators. Proceedings of SPIE -
The International Society for Optical Engineering,
6168.
Carpi, F., S. Raspopovic, et al. (2006). Activation of
dielectric elastomer actuators by means of human
electrophysiological signals. Proceedings of SPIE -
The International Society for Optical Engineering,
6168.
Hunter, I. W. and S. Lafontaine (1992). Comparison of
muscle with artificial actuators. Technical Digest-
IEEE Solid-State Sensor and Actuator Workshop.
Kofod, G. (2001). Dielectric Elastomer Actuators.
Department of Chemistry, Riso - The Technical
University of Denmark. PhD.
Kornbluh, R. (2004). "Dielectric elastomer artificial
muscle for actuation, sensing, generation, and
intelligent structures." Materials Technology 19(4):
216-224.
Kornbluh, R. D., R. Pelrine, et al. (2004). Electroactive
polymers: an emerging technology for MEMS.
MEMS/MOEMS Components and Their Applications,
5344, San Jose, CA, USA, SPIE.
Madden, J. D. W., N. A. Vandesteeg, et al. (2004).
"Artificial muscle technology: Physical principles and
naval prospects." IEEE Journal of Oceanic
Engineering 29(3): 706-728.
O'Brien, B., J. Thode, et al. (2007). Integrated extension
sensor based on resistance and voltage measurement
for a dielectric elastomer. Electroactive Polymer
Actuators and Devices (EAPAD) 2007, 6524, San
Diego, California, USA, SPIE.
Plante, J. S. (2006). Dielectric Elastomers for Binary
Robotics and Mechatronics. Department of
Mechanical Engineering. Cambridge, Massachussetts
Institute of Technology. PhD: 80.
Popovic, M. R., D. B. Popovic, et al. (2002).
"Neuroprostheses for grasping." Neurological
Research 24(5): 443-452.
Sommer-Larsen, P. and A. L. Larsen (2004). Materials for
dielectric elastomer actuators. Smart Structures and
Materials 2004: Electroactive Polymer Actuators and
Devices (EAPAD), 5385, San Diego, CA, USA, SPIE.
Toth, L. A. and A. A. Goldenberg (2002). Control system
design for a dielectric elastomer actuator: The sensory
subsystem. Proceedings of SPIE - The International
Society for Optical Engineering, 4695.
Vogel, V. (2006). "Mechanotransduction involving
multimodular proteins: Converting force into
biochemical signals." Annual Review of Biophysics
and Biomolecular Structure 35: 459-488.
Zhang, R., P. Lochmatter, et al. (2006). Spring roll
dielectric elastomer actuators for a portable force
feedback glove. Smart Structures and Materials 2006:
Electroactive Polymer Actuators and Devices
(EAPAD), 6168, San Diego, CA, USA, SPIE.
BIODEVICES 2008 - International Conference on Biomedical Electronics and Devices
290
