
DYNAMICAL PROPERTY OF PERIODIC OSCILLATIONS
OBSERVED IN A COUPLED NEURAL OSCILLATOR NETWORK
FOR IMAGE SEGMENTATION
Tetsuya Yoshinaga and Ken’ichi Fujimoto
Faculty of Medicine, The University of Tokushima
3-18-15 Kuramoto, Tokushima, 770-8509 Japan
Keywords: Coupled oscillator, image segmentation, dynamical system, bifurcation.
Abstract: We consider image segmentation using the LEGION (Locally-Excitatory Globally-Inhibitory Oscillator Net-
work), and investigate dynamical properties of a modified LEGION, described by noise-free or deterministic
continuous ordinary differential equations. We clarify a phenomenon of image segmentation corresponds to
the appearance of a synchronized periodic solution, and the ability of segmentation depends on its symmet-
ric properties. We study bifurcations of periodic solutions by using a computational method based on the
qualitative dynamical system theory.
1 INTRODUCTION
Image segmentation technique underlies perceptual
processes such as identification, recognition, and sep-
aration of different objects in a natural image. Vari-
ous methods of image segmentation based on statis-
tic, filtering, and machine learning techniques were
presented (Russ, 2002). A practical image seg-
mentation technique using the LEGION (Locally-
Excitatory Globally-Inhibitory Oscillator Network)
has alsobeen proposed (Wang and Terman, 1995; Ter-
man and Wang, 1995). It can segment different areas
in an image, and then the segmented areas are rapidly
exhibited in time-series. Because of the high ability
of LEGION, there has been a lot of research on appli-
cation to medical images (Shareef et al., 1999), im-
plementation of analog electronic circuit (Cosp et al.,
2004), and so on.
The LEGION is a coupled oscillator network con-
sisting of oscillators, each of which has an excitatory
unit and an inhibitory unit, and a global inhibitor. The
dynamics of LEGION is described by nonlinear or-
dinary differential equations with a noise term. It is
know that LEGION segments different image areas
temporally and spatially, based on its own dynamics.
Although its fundamental dynamics has been stud-
ied (Terman and Wang, 1995), there are no investi-
gations for detailed dynamical structure and property
of oscillations observed in the coupled oscillator net-
work. Properties of the oscillations observed in LE-
GION are related to its fundamental ability for im-
age segmentation, therefore analysis of the dynamical
properties enable us to design the parameters of LE-
GION so that it achievesoptimal image segmentation.
In this paper we study dynamical properties of os-
cillations observed in LEGION. Because the dynam-
ics of the original LEGION (Wang and Terman, 1995)
is a stochastic dynamical system with noise terms, in
order to simplify our discussion, we study a noise-free
LEGION, which is a deterministic dynamical system.
Bifurcation analysis is useful for designing system pa-
rameter. Through the bifurcation analysis, we clar-
ify that a phenomenon of image segmentation corre-
sponds to the appearance of a synchronized periodic
solution, and the ability of segmentation depends on
its symmetric properties.
2 MODEL DESCRIPTION
The LEGION consists of a global inhibitor and oscil-
lators which are arranged in grid; and the number of
oscillators corresponds to the number of pixels in tar-
get image. We illustrate single oscillator which con-
sists of an excitatory unit EU
i
and an inhibitory unit
IU
i
in Fig.1 (a). The excitatory unit couples with
the other excitatory units in its four-neighborhood
141
Yoshinaga T. and Fujimoto K. (2008).
DYNAMICAL PROPERTY OF PERIODIC OSCILLATIONS OBSERVED IN A COUPLED NEURAL OSCILLATOR NETWORK FOR IMAGE SEGMENTA-
TION.
In Proceedings of the First International Conference on Bio-inspired Systems and Signal Processing, pages 141-146
DOI: 10.5220/0001062101410146
Copyright
c
SciTePress
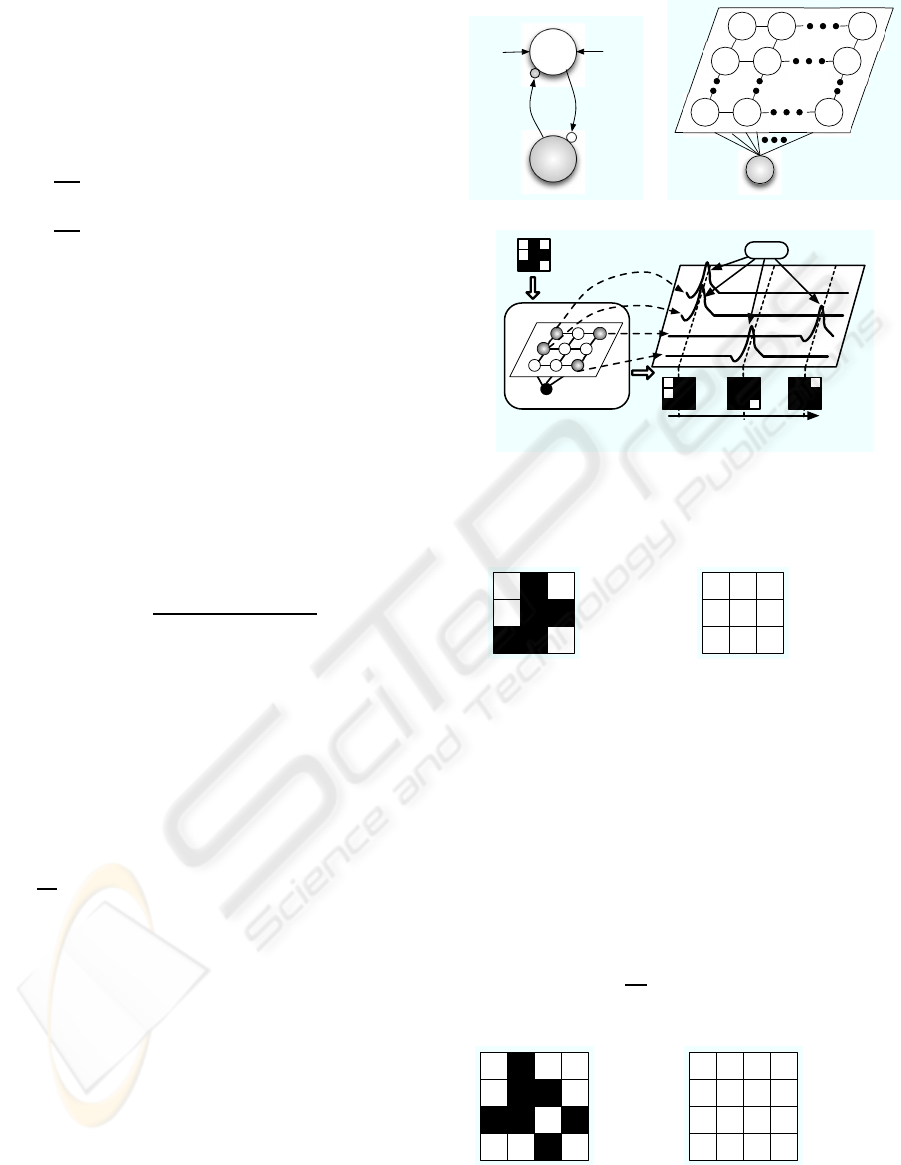
each other, and all excitatory units also connect to
the global inhibitor. The architecture of LEGION is
shown in Fig.1 (b). Figure 1 (c) illustrates the behav-
ior of LEGION and schematic diagram of an image
segmentation procedure. The dynamics of an oscilla-
tor indexed by i (i = 1,2,... ,n) is described by
dx
i
dt
= 3x
i
− x
3
i
+ 2− y
i
+ I
i
+C
i
(1)
dy
i
dt
= η[γ(1 + tanh(x
i
/β)) − y
i
]. (2)
We eliminated noise terms from the original LE-
GION (Wang and Terman, 1995) so that the system
becomes a deterministic dynamical system. The vari-
ables x
i
and y
i
represent the states of the excitatory
and inhibitory units, respectively. The symbol I
i
de-
notes external stimulation to the oscillator. Its value is
determined by the i-th pixel value. The symbolC
i
rep-
resents the summation of the coupling strength among
oscillators, which is defined by
C
i
=
∑
k∈N(i)
W
ik
S(x
k
,θ
x
) −W
z
S(z,θ
xz
) (3)
where
S(x,θ) =
1
1+ exp(−K(x− θ))
. (4)
Here N(i) indicates the four-neighborhood of the i-th
oscillator, W
ik
denotes the coupling strength between
the i-th oscillator and the other k-th oscillator in N(i),
and W
z
denotes the coupling strength between the i-
th oscillator and the global inhibitor. Using the sig-
moidal function, described by Eq.(4), instead of the
Heaviside function in the original LEGION, the dy-
namics of the global inhibitor is defined by
dz
dt
= φ
S
n
∑
k=1
S(x
k
,θ
zx
),θ
zx
!
− z
!
(5)
where γ, β, θ
x
, θ
xz
, θ
zx
, K, and φ indicate parameters,
which are fixed as the same values of the original
γ = 6.0, β = 0.1, θ
x
= −0.5
θ
xz
= θ
zx
= 0.1, K = 50, φ = 3.0 (6)
and η is a bifurcation parameter.
We treat binary images shown in Figs. 2–3; the in-
dexes of the pixels are also shown in the same figures.
For the binary images, the value of I
i
is determined by
I
i
> 0, if the i-th pixel is white
I
i
< 0, if the i-th pixel is black.
(7)
x
i
y
i
I
i
Inhibitory
Excitatory
connection
connection
EU
i
IU
i
C
i
GI
O
1
O
n
O
l+1
O
2
O
l
O
l+2
O
2l
O
lr+1
O
lr+2
(a) (b)
Input image
LEGION
Time
Fire
Output images
(c)
Figure 1: (a), (b) Architecture of LEGION, and (c) behavior
of LEGION and schematic diagram of image segmentation.
1
2
3
4
5
6 9
8
7
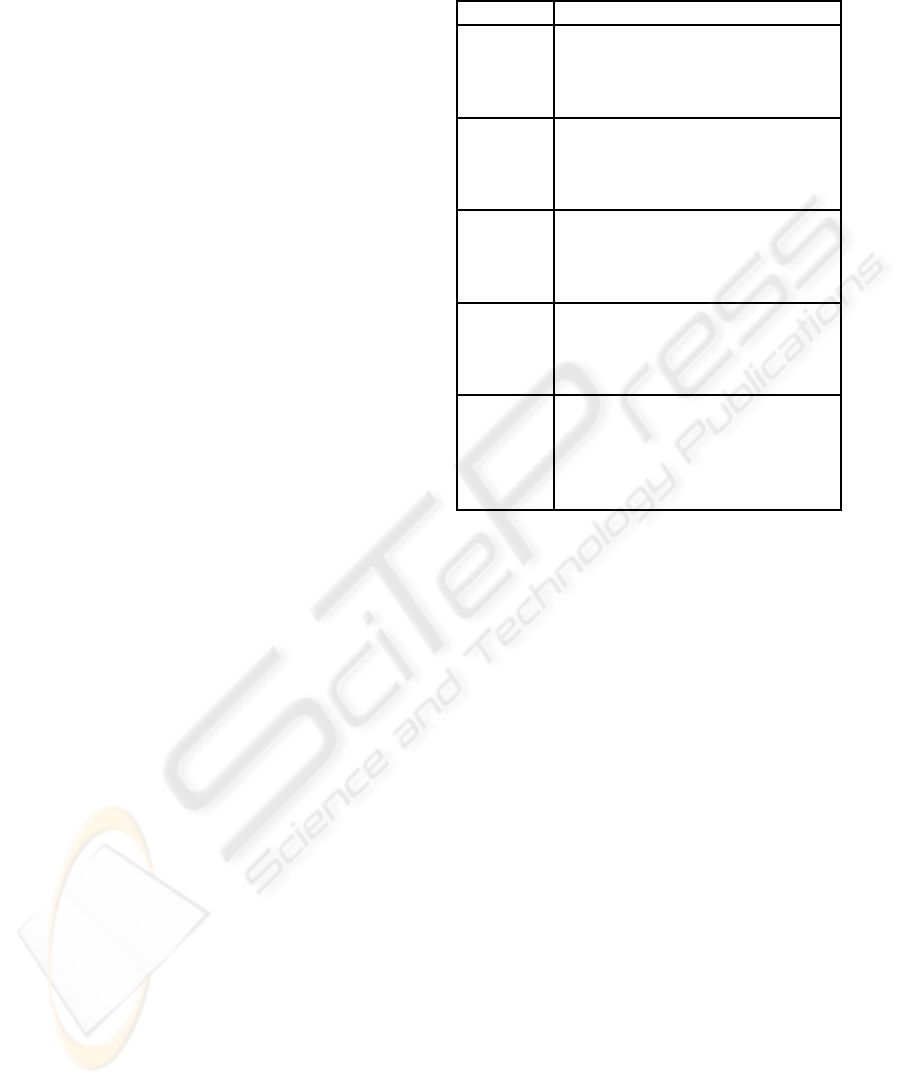
(a) Input image (b) Index number of each pixel
Figure 2: (3× 3)-pixel image and its index number of each
pixel.
3 METHOD OF ANALYSIS
We summarize methods for calculating bifurcations
in the deterministic LEGION defined in the preceding
section. Let us consider an N-dimensional general au-
tonomous differential equation consisting of Eqs.(1)–
(5) such that
dx
dt
= f(x). (8)
1
2
3
4
5
6
9
8
7
10
12
11
13
14
16
15
(a) Input image (b) Index number of each pixel
Figure 3: (4× 4)-pixel image and its index number of each
pixel.
BIOSIGNALS 2008 - International Conference on Bio-inspired Systems and Signal Processing
142

-3
-2
-1
0
1
2
0 100 200 300 400 500 600
t −→
x
1
, x
7
, x
9
−→
(a)
-3
-2
-1
0
1
2
0 100 200 300 400 500 600
t −→
x
1
, x
7
, x
9
−→
(b)
-3
-2
-1
0
1
2
0 100 200 300 400 500 600
t −→
x
1
, x
7
, x
9
−→
(c)
-3
-2
-1
0
1
2
0 100 200 300 400 500 600
t −→
x
1
, x
7
, x
9
−→
(d)
Figure 4: Waveforms of stable periodic solutions under η = 0.02. The thin solid curve indicates the states of the oscillators
x
1
and x
2
; and the heavy solid curve and the dashed curve denote the states of the oscillators x
7
and x
9
, respectively.
DYNAMICAL PROPERTY OF PERIODIC OSCILLATIONS OBSERVED IN A COUPLED NEURAL OSCILLATOR
NETWORK FOR IMAGE SEGMENTATION
143

The state vector x ∈ R
N
corresponds to the set
{x
1
,y
1
,x
2
,y
2
,.. .,x
n
,y
n
,z} ∈ R
2n+1
, where n denotes
the number of oscillators. Note that f(x) is C
∞
-class
function for all state variables and all parameters. We
assume that there exists a solution with initial condi-
tion, x = x
0
at t = t
0
, described by x(t) = ϕ(t;x
0
) for
all t.
We consider a local manifold Σ in the N-
dimension state space with the scalar condition
g(x) = 0, which is described by
Σ =
x ∈ R
N
| g(x) = 0, g : R
N
→ R
. (9)
We arrange a local section Π ⊂ R
N−1
in Σ called the
Poincar´e section. Using the coordinate transforma-
tion h described by
h : Σ → Π ⊂ R
N−1
; x 7→ u, (10)
we define the Poincar´e map T as
T : Π → Π; u 7→ h◦ ϕ
τ(h
−1
(u));h
−1
(u)
(11)
where τ(h
−1
(u)) is the time in which the trajectory
emanating from a point u ∈ Π at t = t
0
will go across
the Π again. Then an m-periodic solution in Eq.(8)
corresponds to a fixed point of T
m
, i.e., m-periodic
point of T. Hence, one of analyses of m-periodic solu-
tions observed in Eq.(8) can be reduced to an analysis
of a fixed point of T
m
.
Let u
∗
∈ R
N−1
be a fixed point of T
m
such that
u
∗
− T
m
(u
∗
) = 0. (12)
Then the characteristic equation of the fixed point is
defined by
χ(µ) = det
µI
N−1
−
∂T
m
(u
∗
)
∂u
= 0 (13)
where I
N−1
is the (N − 1) × (N − 1) identity ma-
trix. By using the Poincar´e map T
m
we totally have
2(N − 1)-different-type hyperbolic fixed points. The
topological property of a hyperbolic fixed point is de-
termined by the value of characteristic multipliers µ
i
,
(i = 1,2,..., N − 1): if all characteristic multipliers
are in the unit circle on the Gaussian plane, then the
fixed point is stable; the fixed point is unstable if one
or more characteristic multipliers are outside the unit
circle. Hence, we can discuss topological property of
the fixed point based on the value of the characteris-
tic multipliers. Let us classify fixed points into two
types
k
D and
k
I, where k is the number of characteris-
tic multipliers outside the unit circle; it also represents
the dimension of unstable subspace. The types D and
I correspond to the even and odd numbers of charac-
teristic multipliers in the range of (−∞, −1) on the
real axis, respectively. Bifurcation of a fixed point oc-
curs when its topological property is changed by the
variation of a system parameter. The types of bifur-
cations are tangent bifurcation, period-doublingbifur-
cation, the Neimark-Sacker bifurcation, and D-type of
branching. Bifurcation sets of a fixed point are com-
puted (Kawakami, 1984) by solving the simultaneous
equation which consists of Eqs.(12)–(13).
Now, let us discuss a symmetrical property of the
system in Eq.(8). Assume that there exists a trans-
formation Q satisfying Q( f(x)) = f(Q(x)). Then
such a system may have a periodic solution satisfy-
ing Q(ϕ(t;x
0
)) = ϕ(t + L;x
0
) for all t, where L ≥ 0
is a phase difference. We call it a (Q, L)-symmetric
periodic solution.
4 RESULTS AND DISCUSSION
This section is devoted to show and discuss numerical
results obtained from bifurcation analysis of a couple
of examples.
4.1 Example 1
We investigate periodic solutions observed in the de-
terministic LEGION for 3 × 3 pixel image shown in
Fig.2. Each external stimulus I
i
, i = 1, 2,...,9, is de-
fined as
I
i
= 0.2, if the i-th pixel is white
I
i
= −0.02, if the i-th pixel is black.
(14)
Because the pixels indexed by 1, 2, 7, and 9 are white,
we observe oscillatory responses from the oscillators
with the same indices, and non-oscillatory responses
from the other oscillators. Note that, because the set
satisfying x
7
≡ x
9
and y
7
≡ y
9
is an invariant subspace
in the state space, the system is symmetric with re-
spect to the transformation, say Q
1
, swapping (x
7
,y
7
)
and (x
9
,y
9
).
For oscillatory solutions we use symbolic se-
quence of strings representing the continuation of in-
phase firing assigned by the oscillator indices and
non-firing assigned by dot (“.”). For example, the set
of (12.79.7.9) indicates a sequence in the order of fir-
ing: oscillators 1 and 2 (instantaneously in-phase), os-
cillators 7 and 9 (instantaneously in-phase), oscillator
7, and oscillator 9, periodically.
Figure 4 shows waveforms of stable periodic so-
lutions observed in the system at η = 0.02. The sym-
bolic sequences corresponding to Figs.4 (a)–(d) are,
respectively, as follows: (a) (12.79.79.12.79); (b)
(12.7.9.7.12.9.7.9); (c) (12.7.9.7.9.12.7.9); and (d)
(12.9.7.9.7.12.9.7). The solutions shown in Figs.4
(a) and (b) are (Q
1
,0)- and (Q
1
,τ/2)-symmetric two-
periodic solutions, respectively, where τ denotes the
BIOSIGNALS 2008 - International Conference on Bio-inspired Systems and Signal Processing
144

period of solution. While, each of the solutions shown
in Figs.4 (c) and (d) has no symmetric property itself,
however, it is reflectional with respect to the trans-
formation Q
1
each other. We show the time-series of
output images from LEGION in Fig.5, which corre-
sponds to the solution of Fig.4 (b). The connected
white pixels, the first pixel and the second pixel, al-
ways appear instantaneously in-phase. Then three dif-
ferent image areas are segmented temporally and spa-
tially.
Figure 5: Snapshots of time-series output in LEGION
which corresponds to the periodic solution shown in Fig.
4 (b). These output images sequentially appear from on the
top-left to the bottom-right; then its appearance in each line
starts from the left.
We investigate bifurcations of periodic points
based on the Poincar´e section defined by
Π =
x ∈ R
N
| x
1
− 1.5 = 0,
dx
1
dt
< 0
. (15)
Figure 6 shows a one-parameter bifurcation dia-
gram of a (Q
1
,0)-symmetric two-periodic solution as
shown in Fig.4 (a). In the bifurcation diagram, the
heavy curve denotes stable (Q
1
,0)-symmetric two-
periodic solution, and the dashed curve indicates its
destabilized solution. The circled point labeled by I
2
denotes the parameter value η = 0.08098952872, at
which we observe a period-doubling bifurcation. By
decreasing the value of η across the point, the follow-
ing bifurcation formula occurs:
1
I
2
→
0
D
2
+
1
D
4
(16)
where the left- and right-hand sides of the arrow indi-
cate the periodic points before and after the bifurca-
tion, respectively. Hence, a stable two-periodic solu-
tion
0
D
2
and a saddle-type four-periodic solution
1
D
4
simultaneously occur, i.e., they coexist in a certain pa-
rameter region. Let us discuss the basin of the stable
solution. Figure 7 (a) shows periodic points of the
Poincar´e map at η = 0.0808, projected to the (x
7
,x
9
)-
plane. The points a and b indicates two-periodic point
0
D
2
, and the points c and d correspond to a (Q
1
,τ/2)-
symmetric two-periodic solution, which is irrelative
to the bifurcation in Eq.(16). The periodic points of
the coexisting
1
D
4
are near the point a. It can be con-
firmed by the phase portrait shown in Fig.7 (b), an en-
larged figure of Fig.7 (a); the points e and f denote a
8305
1.83
8295
.829
0.075 0.076 0.077 0.078 0.079 0.08 0.081 0.082
I
2
x
7
−→
η −→
Figure 6: One-parameter bifurcation diagram of x
7
for the
parameter η. The thin solid curve, the heavy solid curve,
and the dashed curve denote the unstable four-periodic
point, the stable two-periodic point, and its destabilized
two-periodic point, respectively.
-1.9
1.85
-1.8
1.75
-1.7
1.65
-1.9 -1.85 -1.8 -1.75 -1.7 -1.65
a
b
c
d
x
7
−→
x
9
−→
7185
7184
7183
-1.7185 -1.7184 -1.7183
a
e
f
x
7
−→
x
9
−→
(a) (b)
Figure 7: Phase portrait of periodic points on the (x
7
,x
9
)-
plane under η = 0.0808. The right figure is the enlarged
figure around the point a in the left figure.
part of four-periodic points
1
D
4
. The period-doubling
bifurcation of
1
I
2
occurs so that its symmetry is bro-
ken, then the placement of the periodic points are re-
flected in the topological property which can be ex-
plained by its eigenvector. Besides, the basin bound-
ary of
0
D
2
is separated by the stable manifold of
1
D
4
.
That is, we can observe
0
D
2
when the initial value is
placed only near its periodic point.
4.2 Example 2
As the second example we treat 4 × 4 pixel image
shown in Fig.3. The value of each external stimu-
lus I
i
, i = 1,2,.. .,16, is defined by Eq.(14); its in-
dex number i is shown in Fig.3 (b). Due to the pix-
els indexed by 1, 2, 4, 8, 9, 11, 13, 14, and 15
are white, the dynamical system has two symme-
tries for two swapping operators. One is described
by Q
2
( f(x)) = f (Q
2
(x)) where Q
2
is the transfor-
mation that swaps (x
1
,y
1
,x
2
,y
2
) with (x
4
,y
4
,x
8
,y
8
),
respectively. The other symmetry is described by
Q
3
( f(x)) = f(Q
3
(x)) where Q
3
is the transformation
that swaps (x
11
,y
11
) with (x
16
,y
16
). In this exam-
ple, we investigate periodic solutions with the follow-
ing relations: (x
1
,y
1
) = (x
2
,y
2
), (x
4
,y
4
) = (x
8
,y
8
),
and (x
9
,y
9
) = (x
13
,y
13
) = (x
14
,y
14
). Periodic solu-
DYNAMICAL PROPERTY OF PERIODIC OSCILLATIONS OBSERVED IN A COUPLED NEURAL OSCILLATOR
NETWORK FOR IMAGE SEGMENTATION
145
tions in Table 1 are observed under η = 0.02. Note
that we employed the symbols a,b, c,... ,g instead of
the double-digit index numbers 10,11,12, ...,16, re-
spectively. Besides, the symbols A, B, C, D, and
E represent kinds of periodic solutions. All solu-
tions in the category A are (Q
2
,0)-symmetric two-
periodic solutions; the solutions A
1
and A
2
are re-
flectional symmetry for Q
2
, then A
3
and A
4
are also
reflectional symmetry for Q
3
. The category B indi-
cates (Q
3
,0)-symmetric two-periodic solution, then
B
1
and B
2
are reflectional symmetry for Q
2
. The cate-
gory C denotes (Q
3
,τ/2)-symmetric two-periodic so-
lution, then C
1
and C
2
are also reflectional symmetry
for Q
2
. Each periodic solution in D has two sym-
metries. The category D
1
is a two-periodic solution
with (Q
2
,0)- and (Q
3
,0)-symmetric properties; the
others D
2
, D
3
, and D
4
are two-periodic solutions with
(Q
2
,0)-symmetric and (Q
3
,τ/2)-symmetric. All so-
lutions in E are asymmetric two-periodic solutions,
however, respective pairs of solutions (E
1
,E
2
) and
(E
3
,E
4
) are reflectional symmetry for Q
3
. The solu-
tions (E
2
,E
3
) and (E
1
,E
4
) are also reflectional sym-
metry for Q
2
, respectively. Besides, in the solutions
A
3
, A
4
, B
3
, B
4
, C
3
, C
4
, D
1
, D
4
, and E
5
, the image
area connected white pixels, indexed by 9, 13, and 14,
synchronously fire with the other white area, e.g., the
pixels indexed by 1, 2, 4, or 8. This synchronization
is interesting from a viewpoint of nonlinear science.
However, it is inappropriate for image segmentation.
5 CONCLUDING REMARKS
We have investigated dynamical properties of peri-
odic solutions observed in the deterministic LEGION,
which is a modification from the original one by elim-
inating noise terms and replacing the Heaviside func-
tion with a sigmoidal function, in order to investi-
gate dynamical properties and ability of LEGION.
The main results obtained from the analysis using our
method for computing bifurcation sets, are summa-
rized as follows: (1) The dynamical system has var-
ious kinds of symmetric properties corresponding to
the input image. Indeed we see that symmetric and
asymmetric periodic solutions can be observed. Its
patterns are based on the symmetric dynamical struc-
ture of LEGION; (2) A stable symmetric periodic so-
lution bifurcates under a certain parameter. Moreover,
then its basin boundary is determined by the stable
manifolds of the coexisting saddle-type periodic solu-
tion; and (3) We also observed periodic solutions such
that different image areas fire synchronously. The in-
trinsic objective of image segmentation in LEGION
is that different image areas are not exhibited at the
Table 1: Periodic solutions by symbolic sequences.
Category Periodic solutions
A
1
(1248.b.g.9de.b.g.1248.b.g.9de)
A
2
(1248.g.9de.b.1248.g.b.9de.g.b)
A
3
(12489de.g.b.g.b.12489de.g.b)
A
4
(12489de.b.g.b.g.12489de.b.g)
B
1
(12.48.bg.9de.12.bg.48.9de.bg)
B
2
(12.9de.bg.48.12.bg.9de.48.bg)
B
3
(129de.bg.48.129de.bg.48.bg)
B
4
(12.bg.489de.12.bg.489de.bg)
C
1
(12.g.9de.b.48.g.12.b.9de.g.48.b)
C
2
(12.g.48.b.9de.g.12.b.48.g.9de.b)
C
3
(129de.g.b.48.g.129de.b.g.48.b)
C
4
(12.g.b.489de.g.12.b.g.489de.b)
D
1
(12489de.bg.12489de.bg.bg)
D
2
(1248.g.9de.b.g.1248.b.9de.g.b)
D
3
(1248.b.g.9de.b.1248.g.b.9de.g)
D
4
(12489de.g.b.g.12489de.b.g.b)
E
1
(12.g.b.48.9de.g.b.12.48.g.b.9de)
E
2
(12.b.g.48.9de.b.g.12.48.b.g.9de)
E
3
(12.b.g.9de.48.b.g.12.9de.b.g.48)
E
4
(12.g.b.9de.48.g.b.12.9de.g.b.48)
E
5
(12.b.g.489de.12.b.g.489de.b.g)
same time. Therefore, the appearance of the periodic
solutions is inappropriate for this objective.
Their analyzed dynamical properties are directly
related to fundamental abilities of LEGION. For
higher quality of the segmentation, a mechanism for
desynchronizing in-phase periodic solutions is re-
quired in the coupling system.
REFERENCES
Cosp, J., Madrenas, J., Alarcon, E., Vidal, E., and Villar, G.
(2004). Synchronization of nonlinear electronic os-
cillators for neural computation. IEEE Trans. Neural
Networks, 15(5):1315–1327.
Kawakami, H. (1984). Bifurcation of periodic responses
in forced dynamic nonlinear circuits: computation of
bifurcation values of the system parameters. IEEE
Trans. Circuits Syst., CAS-31(3):246–260.
Russ, J. (2002). The image processing handbook, fourth Ed.
CRC Press.
Shareef, N., Wang, D., and Yagel, R. (1999). Segmentation
of medical images using legion. IEEE Trans. Medical
Imaging, 18:74–91.
Terman, D. and Wang, D. (1995). Global competition and
local cooperation in a network of neural oscillators.
Physica, D81:148–176.
Wang, D. and Terman, D. (1995). Locally excitatory glob-
ally inhibitatory oscillator networks. IEEE Trans.
Neural Networks, 6(1):283–286.
BIOSIGNALS 2008 - International Conference on Bio-inspired Systems and Signal Processing
146
