
A PROBABILISTIC TRACKING APPROACH TO ROOT
MEASUREMENT IN IMAGES
Particle Filter Tracking is used to Measure Roots, via a Probabilistic Graph
Andrew French
1
, Malcolm Bennett
1
, Caroline Howells
1
, Dhaval Patel
2
and Tony Pridmore
1
1
Centre for Plant Integrative Biology, University of Nottingham
Sutton Bonington Campus, Loughborough,UK. LE12 5RD
2
Plant Sciences, School of Biosciences, University of Nottingham
Sutton Bonington Campus, Loughborough,UK. LE12 5RD
Keywords: Particle filter, image analysis, quantification, bioinformatics.
Abstract: This paper introduces a new methodology to aid the tracing and measurement of lines in digital images.
The techniques in this paper have specifically been applied to the labour intensive process of measuring
roots in digital images. Current manual methods can be slow and error prone, and so we propose a semi-
automatic way to trace the root image and measure the corresponding length in the image plane. This is
achieved using a particle filter tracker, normally applied to object tracking though time, to trace along a root
in an image. The samples the particle filter generates are used to build a probabilistic graph across the root
location in the image, and this is traversed to produce a final estimate of length. The software is compared
to real-world and artificial length data. Extensions of the algorithm are noted, including the automatic
detection of the end of the root, and the detection of multiple growth modes using a mixed state particle
filter.
1 INTRODUCTION
Within biological science experiments it is common
for measurements of samples of interest to be made
from digital images. This paper is concerned in
particular with the length measurement of roots of
Arabidopsis thaliana from images of plates of roots
taken with a digital camera. This process is largely
carried out manually, by measuring the roots by
hand in an image processing package such as the
public domain ImageJ (Abramoff et al., 2004). For
each root, the user must manually mark a line along
its length, and the software then calculates the
length. Other methods measure mouse travel
distance as the user traces an image of a root (Pateña
& Ingram, 2000). Clearly, it would be useful to
automate as much of this process as possible,
particularly the laborious and error-prone manual
tracing step.
Some tools already exist to aid with root
measurement, but each has its drawbacks or specific
mode of operation. RootLM (Qi et al., 2007), for
example, is capable of measuring growth rates over
daily intervals, but requires root growth to be
marked up on the petri dish in marker pen, and the
removal of the actual roots, prior to scanning. MR-
RIPL 2.0 (Smucker, 2007) estimates the lengths and
widths of roots by applying global thresholding and
thinning processes to identify roots on an opposing
intenisty background, an approach which can be
hampered by clutter on the image plane. Other tools
similarly use thresholding and thinning to isolate the
roots (Bauhus & Messier, 1999), and can also be
sensitive to noise and clutter.
In this paper, a robust probabilistic method of
root length measurement is presented. This
approach uses a particle filter to track along the root
image, building a probabilistic graph using the
sample locations and observed likelihoods at those
locations. The graph is then pruned, removing low
probabilty vertices, and a shortest path algorithm is
applied to describe the line down the centre of the
root. This line can then be used to provide a
measurement of root length. The approach is found
to work well, handling images with clutter and
lighting variations obscuring parts of the root.
Section 2, describes how the shape of the root is
traced and how from this a measurement of length is
108
French A., Bennett M., Howells C., Patel D. and Pridmore T. (2008).
A PROBABILISTIC TRACKING APPROACH TO ROOT MEASUREMENT IN IMAGES - Particle Filter Tracking is used to Measure Roots, via a
Probabilistic Graph.
In Proceedings of the First International Conference on Bio-inspired Systems and Signal Processing, pages 108-115
DOI: 10.5220/0001062701080115
Copyright
c
SciTePress
calculated. Results are presented in Section 3 which
compare this new algorithm to manual methods on
real-life and synthetic images. The discussion in
Section 4 then examines the results, and an appraisal
of the algorithm is presented, including the
possiblity of wider applications.
2 METHOD
2.1 Root Tracing
Before a quantification of root length can take place,
an accurate tracing of the root image is required.
The approach adopted here is based on a particle
filter tracking technique. Particle filtering, first
developed as a method of tracking moving objects
through an image sequence, is a way of representing
system states that might not be definable with
closed-form functions. States are represented using
probability density functions (PDFs), or rather
discrete estimates of them modelled by particle sets.
A particle set can represent a function by sampling
the distribution and weighting particles
corresponding to these samples. Contained within a
particle is all the information about the state of the
system at that time, for example, for target tracking
across the image plane a particle might contain (x, y)
coordinates and velocity information.
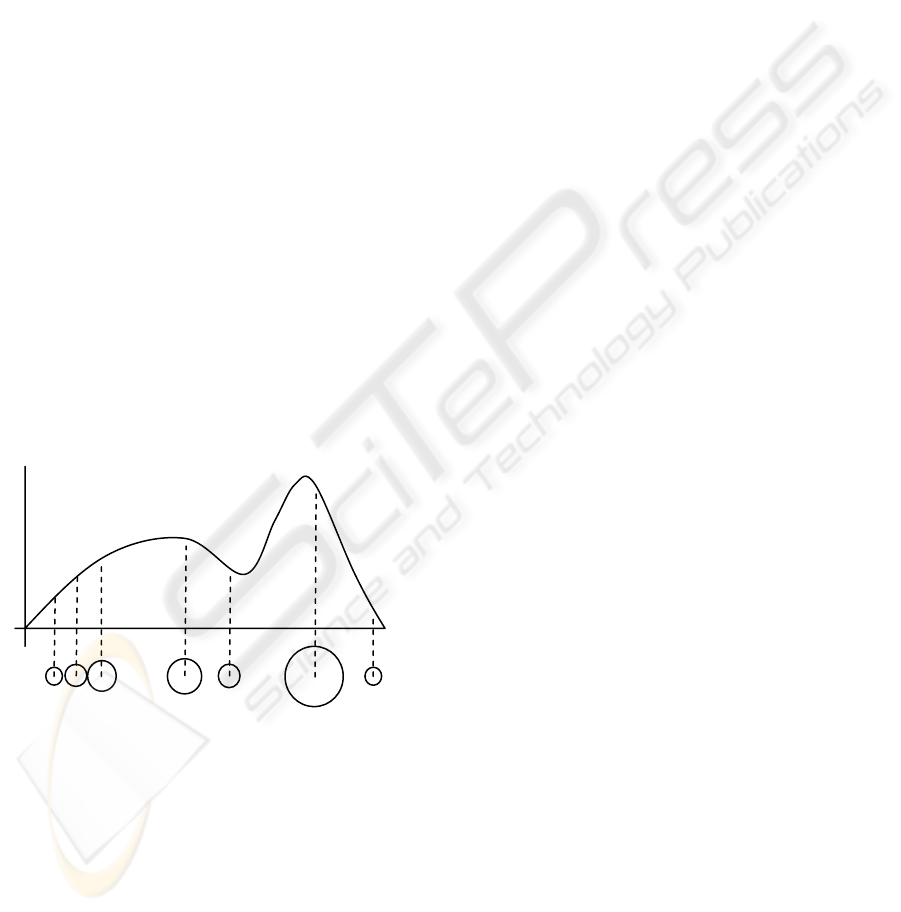
Figure 1: Representing a continuous PDF using a particle
set of 7 particles. The particles are randomly distributed,
and the weight of a particle (represented by the size of the
circle) corresponds to the value of the function at that
point.
As shown in Figure 1, a continuous function can be
approximated by a finite number of particles and
their weights. The more particles that are used, the
more accurate the representation. Normally, when
tracking a moving object, the PDF is a measure of
the probability of the target actually being at a
position, and is measured using an observation
model which reports high probabilities when it is
over an area of image that matches the target
appearance model. So, in Figure 1 above, the first,
lower peak might represent the location of some
background clutter, and the second, higher peak the
actual target.
When tracking a target over time, the predicted
position of the object depends on both where the
object was at the last timestep, and on a motion
element determined by a dynamic model of the
target. Propagating the continuous PDF estimate of
position forward in time with this motion model
tends to shift the curve in the direction of the
prediction. Adding an additional random diffusion
term, simulating noise in the tracking, has the effect
of smoothing the PDF, and after the motion phase,
the PDF is reinforced with measurements using the
observation model.
In the discrete case, where a finite set of particles
represents the distribution, a set of particles are
selected and have the motion model applied to their
state. These particles are selected with a probability
in proportion to their weight, and are replaced after
selection, ready for re-selection. This has the effect
of generating a new particle set in which the
particles tend to cluster mainly around the higher
probability peaks, with fewer particles representing
the lower probability valleys. As the peaks are what
we are interested in (they suggest where our target
actually is), this importance sampling improves
tracking performance.
This process is known as factored sampling.
Every time we select a particle we process its state
parameters forward in time using the motion model,
and then weight this particle based on the
observation model at this new position. This gives us
our new set of weighted particles, ready for another
iteration of the algorithm. One of the attractions of
particle filtering methods is that the sample set size
remains constant, so the algorithm runs in a
predictable time, and the quality of the
representation of the PDF can be increased by
increasing N, the number of particles in the set. A
classic example of a computer vision tracking
algorithm which uses an algorithm like this is the
Condensation algorithm (Blake & Isard, 1998).
We have adapted this tracking model so that
instead of being used over time, it is used over
space, to trace along a root in a digital image. It is
assumed that the root lies approximately parallel to
one of the major image axes, so we know
approximately which way to trace the image. We
shall assume here that the root lies approximately
parallel to the y-axis.
The algorithm proceeds as follows:
P
(
x
)
A PROBABILISTIC TRACKING APPROACH TO ROOT MEASUREMENT IN IMAGES - Particle Filter Tracking is
used to Measure Roots, via a Probabilistic Graph
109

1. The user selects, in the image plane, the starting
point of the root to be traced. Around this an
initial distribution of N particles is built. This
distribution is normally a Gaussian distribution
along the x-axis, centred on the user’s click
point. The y-locations are fixed to the user’s set
y-coordinate for reasons which will become
clear. Initially all these particles are given equal
probability weights.
2. Particles are selected with replacement in
proportion to their probability weighting. As
each particle is selected, its y-coordinate is
incremented by exactly 1 pixel, and the x-
coordinate is processed forward using its
predictive ‘motion’ model plus a small level of
random Gaussian noise.
3. The new particles are weighted by comparing
the image at their current location with the
observation model of a root cross section.
4. The probabilities associated with each particle,
and the locations of the particles are stored as
nodes in a graph – this will be used later on. All
the nodes at time t are connected to all the nodes
at time t-1, therefore each iteration N new nodes
and N*N new edges are added to the graph.
5. The algorithm repeats to step 2, until the root is
fully traced and the user stops the process at
iteration I.
Fixing the y-coordinate to proceed at an increment
of 1 pixel per iteration provides an external force to
the tracing algorithm to move the trace down the
root by exactly one pixel at a time. This is analogous
to tracing a line by hand using a pencil, starting at
one end and moving smoothly to the other. This
external force along the y axis, combined with the
motion model to cope with curvature along the root
in the x axis, replaces the motion model used when
tracking moving objects, and allows an
uninterrupted and unrepeated line to trace along the
root.
At the completion of the algorithm, there exists a
graph G with N*I nodes and N*N*I edges. Each
node represents a weighted sample from the particle
filter, and has a corresponding weight (probability),
and coordinate within the image plane. An example
visualization of how the graph relates to the particles
and image is presented in Figure 2.
It should be noted that currently the tracing is
ended manually by the user when the trace is seen to
reach the end of the root. Detecting when tracking
should cease is a hard problem as tracking
algorithms assume the target to exist at the next
timestep. The authors are working on a robust
method to detect the end of the root automatically,
which is mentioned further in Section 4.1.
Figure 2: Illustration of the relationship between the
images, observation model output (curves), particle
weights (circles), and graph connections between two
steps in the algorithm, t and t-1. Note some of the lines
connecting the curves to particle weights at t-1 have been
omitted for clarity. Grey arrows indicate the edges from
one particle when it is mapped to a node in the graph– in
fact every node at each layer has edges connecting to all
nodes generated at the next step of the algorithm.
2.2 Probabilistic Graph
Graph G can be thought of as a 3D surface map
which represents probabilities associated with each
possible root location. Using this we aim to produce
an accurate measure of root length. This is done by
removing low probability nodes from the graph and
then finding the minimum distance route through the
remaining graph, from the start position to an end
node.
Low probability nodes are removed as they
represent areas of the image space explored by the
particles which are not centred over the root. During
the root tracking procedure, at each iteration
particles are spread around the root width, to
increase the chances of finding the root at each step.
The aim of our graph pruning procedure is to
remove those nodes from the graph that represent
locations in the image which are so far from the
ideal observation model result that they cannot
represent a root location. This information is useful
during the online tracking, but is not needed for the
offline graph traversal.
To do this pruning, we simply remove
probabilities whose measurements fall below a
certain number of standard deviations from the mean
measurement across the set, although any heuristic-
based method could be employed here to remove
low quality nodes from the graph. This has the effect
of producing a leaner graph which only covers the
space occupied by the root.
To actually find the shortest path through the
graph, Dijkstra’s method for determining shortest
t
-1
t
t
t
-1
BIOSIGNALS 2008 - International Conference on Bio-inspired Systems and Signal Processing
110
paths was implemented. This method involves a
greedy algorithm which determines the shortest
distance to each node as it traverses the graph, in our
case along the length of the root, therefore giving the
shortest path along the length of the root, through
the remaining high-quality nodes.
3 RESULTS
The proposed method was tested by comparing
measurements of roots obtained using standard
manual techniques and using the new software. The
particle filter used 25 particles in all the tests.
3.1 Software versus Non-expert User
The software was tested with an image of plated
roots (Figure 3). The aim was to measure the length
of the roots from the black line to the root tip. The
image had been taken with an off the shelf digital
camera, and was stored in a compressed JPEG
format, at a resolution of 783x576 for the close-up in
Figure 3. The roots were measured manually, by an
inexperienced user, using the measure tool in ImageJ
(Abramoff et al., 2004). This measurement was
repeated 5 times. The particle-filter software was
also run five times. An example output is presented
in Figure 3, while numerical results are given in
Table 1.
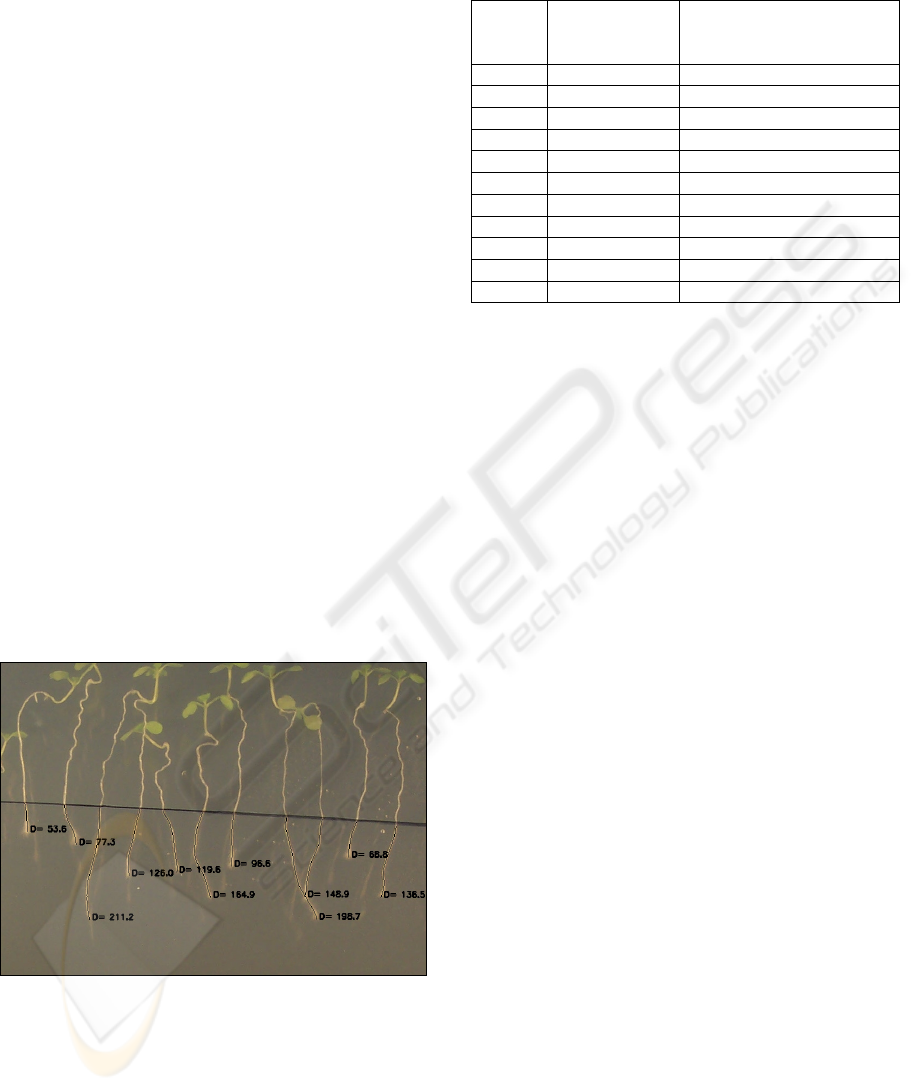
Figure 3: Image of growing roots with the software output
overlaid. The root numbers refer to the results in Table 1.
Table 1: Results of a comparison between the new
software and manual measurements made by a non-expert.
Root Error between
means, pixels
Relative error
(Mean-mean error as % of
manual measure)
1 -0.1 0.18
2 1.26 1.65
3 3.16 1.52
4 1.3 1.02
5 2.14 1.84
6 2.12 1.29
7 3.86 4.1
8 4.36 2.23
9 1.58 1.05
10 1.98 2.96
11 1.84 1.35
The mean length for these roots is 126.4 pixels, from
the ground truth. The average standard deviation for
the manual measures was 1.97 pixels, and 1.71
pixels for the proposed software.
The average time taken to measure manually the
roots on the plate in Figure 3 once each was 112
seconds. The new software, including the time for
user interactions clicking on the image and stopping
the tracing, took 70 seconds.
The average relative error from Table 1 is 1.7%.
Root 7 produces the most ambiguous measures from
the new software, but on inspection its root tip is
blurry and ambiguous in the image itself, which may
explain the error. This situation might produce
measurements with high variability when different
subjects are asked to perform the measurement
manually.
3.2 Software versus Expert User
The software was also tested against manual
measurements made by an expert user. The root
images used in this section are more complex, with
the roots showing many lateral roots. There are also
significant reflections from the rear of the plate, and
the images are of low resolution (640x480), all of
which makes this scenario a challenge for the
software.
For this experiment, five roots in Figure 4 were
manually measured in ImageJ by a trained biologist
familiar with making such measurements. This
measurement was compared with the average results
of five runs of the new software approach. The data
is presented in millimetres; using the ruler in Figure
3 a conversion was calculated between pixels and
millimetres. The results are presented in Table 2.
The test image is presented in Figure 4.
1 2 3 4 5 6 7 8 9 10 11
A PROBABILISTIC TRACKING APPROACH TO ROOT MEASUREMENT IN IMAGES - Particle Filter Tracking is
used to Measure Roots, via a Probabilistic Graph
111
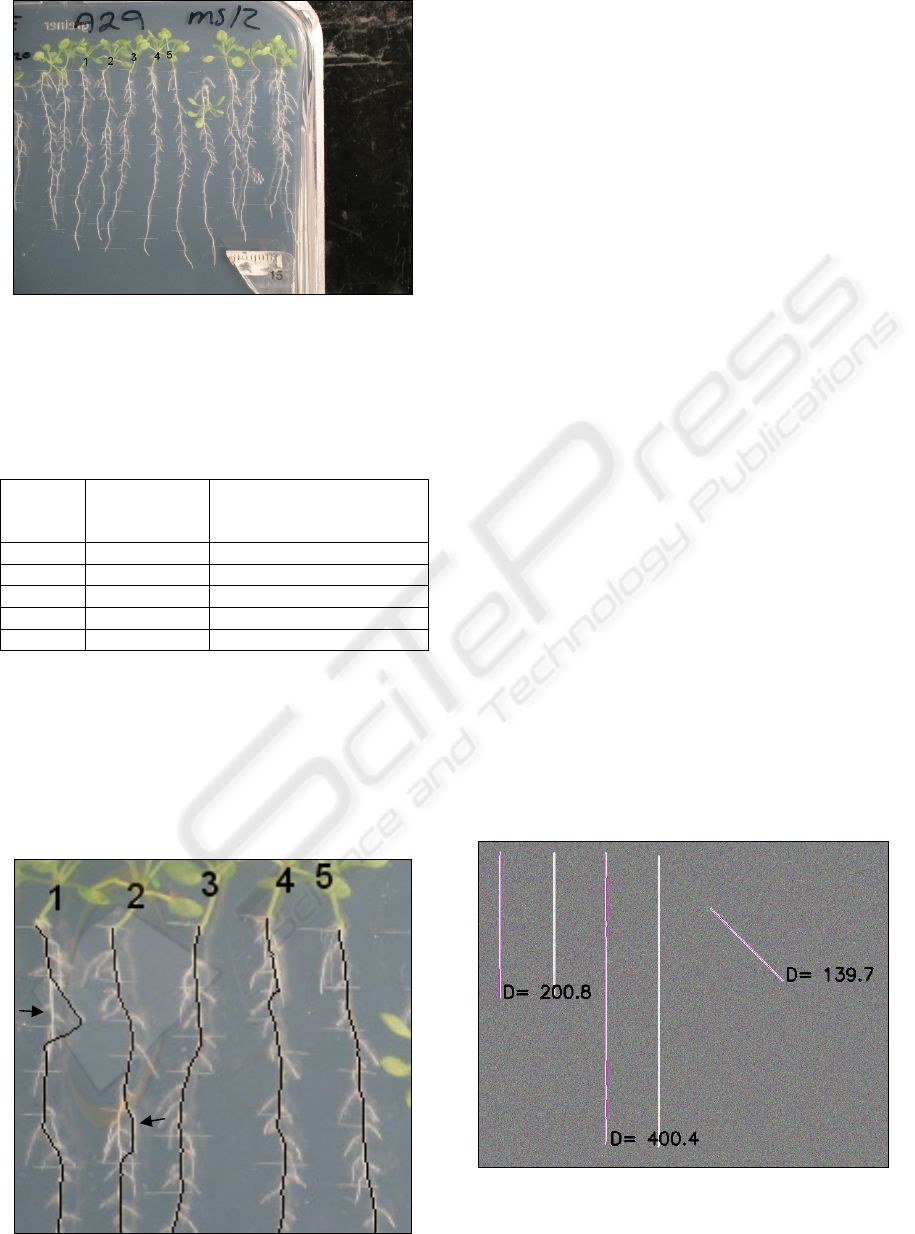
Figure 4: Image of growing roots. Note the large numbers
of lateral roots and reflections which clutter the image.
The root numbers refer to the results in Table 2.
Table 2: Results of a comparison between the new
software and manual measurements made by an expert
user.
Root Error
between
means, mm
Relative error
(Mean-mean error as % of
manual measure)
1 0.78 1.67
2 -1.95 4.54
3 1.32 2.89
4 0.86 1.81
5 0.02 0.05
The average root length from the manual measures
was 46.8mm. The proposed software measures had
an average standard deviation of 0.23mm. The
average relative error from Table 2 is 2.2%.
The automatic tracing of roots 1 and 2 suffered
the most due to interference from the lateral roots.
Examples of such error cases are presented in Figure
5.
Figure 5: Example output, with error cases marked.
Figure 5 illustrates two of the most common error
cases. For case (a), the lateral root is followed rather
than the main root about 50% of the time. This is
because when tracing the line, the tracking algorithm
reaches a junction, and as the motion model predicts
the line to continue roughly half way between the
two actual lines, and both lines produce very similar
measurement models, half the time the algorithm
will take one route, and the other half of the time the
other route will be followed.
The particle filtering trackers can cope with this
kind of ambiguity over short distances, but over
longer distances the samples tend to all migrate to
the hypothesis which is producing the slightly better
observation measures at the time. This fading of a
hypothesis is a common practical problem with
particle filter tracking (King & Forsyth, 2000).
In error case (b) in Figure 5, the error is caused
by the lateral root consistently having a better
measurement model. This error will therefore be
present on every run of the algorithm. On inspection,
the better measurement appears to be caused by a
misrepresentation of the main root in the image. The
root here appears very thin. This may be an artefact
introduced by the low resolution of the image.
However it is caused, the result is that the lateral
root provides a higher response to the measurement
model and hence the root is traced along this
erroneous path.
3.3 Artificial Scenarios
The software was also tested against artificial
images. These images were produced using straight
lines of a similar colour to the roots. Gaussian noise
was applied to the image.
Figure 6: An artificial image with lines of length 200, 400
and 141.4 pixels respectively. Overlaid are example
measurements produced by the new software.
a
b
BIOSIGNALS 2008 - International Conference on Bio-inspired Systems and Signal Processing
112
The purpose of this experiment was to test the
software against a known ground truth measurement.
Figure 6 shows one result out of 5 repeats which
aimed to test the measuring software against a
simple artificial ground truth. The results for the 3
lines measured are presented in Table 3.
Table 3: Results of running the algorithm on artificial data.
Line True
length
(pixels)
Average measured
by new algorithm
(pixels)
Average
error
(pixels)
1 200 199.9 -0.1
2 400 400.2 0.2
3 141.4 140.3 -1.1
4 SYSTEM EXTENSIONS
The basic system described and tested above has
been extended in two ways. First, a method is being
developed to automatically detect when the end of
the root has been reached. Second, a mixed state
particle filter (Isard & Blake 1998) has been
incorporated into the framework to allow the
labelling of different possible growth modes for the
root, such as a gravitropic response. These will be
described below.
4.1 Automatic Root Tip Detection
One of the major time consuming and error prone
aspects of the root measurement system detailed
above is the manual intervention required to stop the
line tracing when the end of the root is reached.
This was necessary because the premise of the line
tracker is that at each iteration the next point on the
line definitely does exist somewhere in the image –
this assumption is broken when the end of the root is
reached. In the absence of a tip detection capability
or manual input the tracker will trace whatever
produces the best measurement from the image, e.g.
see Figure 7 (left).
The developed method proceeds as follows. During
the line tracing phase of the software, the user
allows the system to track beyond the end of the
root. The graph traversal then proceeds as before,
and a final path representing the trace of the root is
produced. Now the new step: the measurement
probabilities along this path are examined. Figure 8
below shows the trace of log probabilities along a
root:
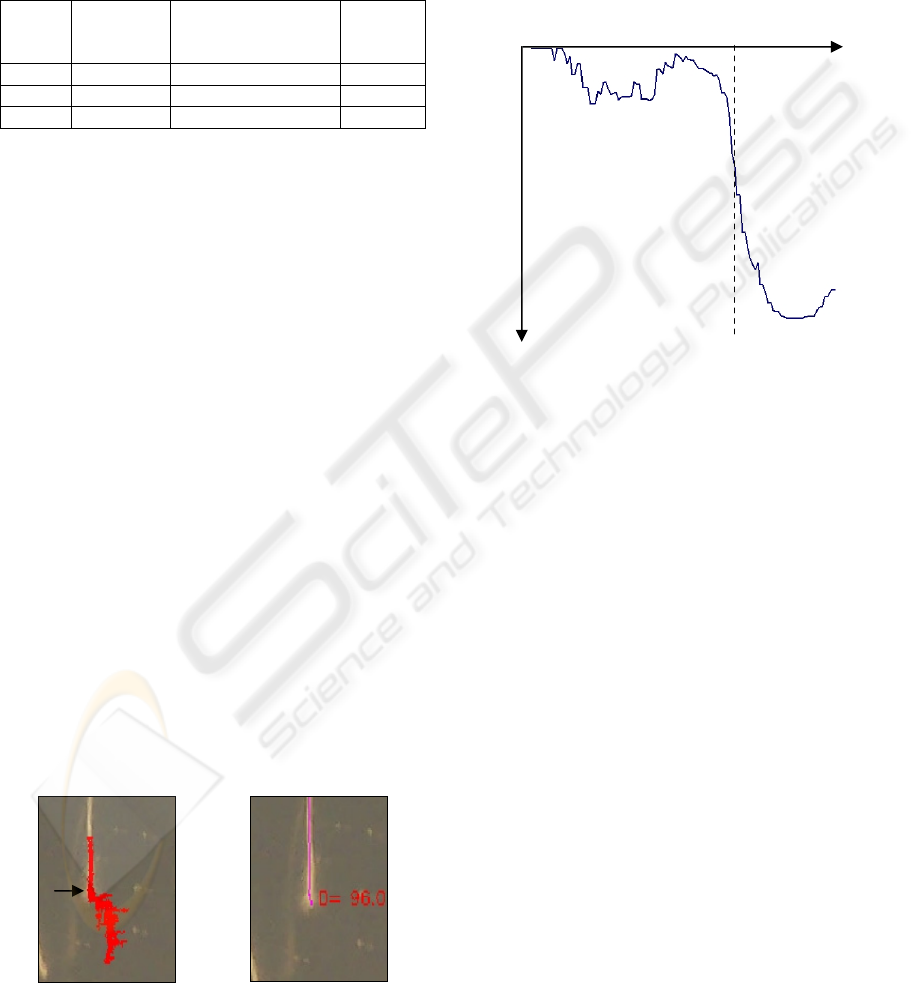
Figure 8: Graph depicting how log of measurement
observation probabilities varies along the root. The dashed
line marks the approximate end of the root.
Summary statistics of the log probabilities are
calculated along the chosen path, and the end of the
root is marked as where the current measurement
falls below a set number of standard deviations from
the mean. This was seen to work well on 7 of the 11
roots in Figure 3 – see figure 7 (right) for an
example output.
4.2 Labelling of Growth Modes
It is possible to build into the existing particle
filtering framework more than one predictive model
to process the particles forward along the root
image. This is achieved using a form of mixed state
particle filter (Isard & Blake, 1998). Essentially, it
is possible to define multiple models for the driving
force behind the tracing of the root, and the most
appropriate of these will generate higher quality
particles at each step. For example, to model
gravitropic growth, one model might aim to trace the
root left to right across the image, and the second
model would aim to trace the root top to bottom.
Whichever model prospered the most is naturally
selected to label the image – see Figure 9.
Distance along roo
t
0 Log (p) -8
Figure 7: Left: A particle filter tracker will always try and hunt
a
target even if one does not exist, as the spread of particles past the
root tip (indicated by arrow) shows. Right: An example result o
f
the same root image with the new root termination criteria
.
A PROBABILISTIC TRACKING APPROACH TO ROOT MEASUREMENT IN IMAGES - Particle Filter Tracking is
used to Measure Roots, via a Probabilistic Graph
113

Figure 9: Example root trace using a mixed state model
consisting of two states, normal growth (white) and
gravitropic (black).
5 CONCLUSIONS
5.1 Discussion of Results
The results comparing the software root length
measures to the manual measurements show the new
technique to produce results to about 2% of the
actual measures most of the time. There was a
larger error when comparing the new software with
the expert user (2.2%) compared to the non-expert
(1.7%), however the images in Section 3.2 are more
challenging than those in Section 3.1, which may
account for some of the increased error also.
Something to be wary of with these kinds of
comparisons is using manually marked-up ground
truths to compare with the automated measurements.
There is an inherent subjectivity in determining the
length of the roots, dependant on, for example, the
accuracy with which the curves in the roots are
traced. The more finely the shape of the root is
followed, the longer the measurement. There is
similarity here with the coastline measuring
problem. Some structures can be thought of as
fractal in composition, such as a coastline
(Mandelbrot, 1967) or complete root systems (Eshel,
1998). When trying to measure such systems, the
scale (or accuracy) with which the waves and
perturbations are traced has a bearing on the overall
length calculated. This software can be thought of as
producing the finest scale estimate of length
available at the image resolution, and so is likely to
overestimate length compared to a manual
measurement. This may be reflected in the results
reported in Section 3, with most errors indicating an
overestimate of line length.
Even if a user and the new software were to use
the same scales of measurement, there is still human
error present in the measuring process, which can be
quantified by the standard deviation of the manually
measured data. The manual measurements in section
3.1 give an average standard deviation of ~2 pixels.
Therefore most (99%) of the manually measured
lengths can be expected to fall within about 6 pixels
(three standard deviations) of the true value for roots
of around the length seen in section 3.1. The new
software used on these roots has an average relative
error of 1.7% which translates to a error of 2.1 pixels
on average for these roots, and therefore this
software error falls within the expected error bounds
of manually entered data.
The time to use the new software was less than
the time to take the measurements manually. This
should be improved upon still when implementation
of the root tip finding algorithm is completed. The
system should be less fatiguing to the user as less
high-accuracy input is required. This will help to
lower the number of mistakes made over the course
of measuring many roots.
Labelling of the different growth modes of the
root as illustrated in Section 4.2 is also ongoing
work, but early results indicate the system can be
used for identifying different ways in which a root
trace line is produced, as long as trace motion
models exist to sufficiently differentiate the modes
of production of the line.
5.2 Improving the Reliability
As it stands, the software is still in trial stages and
reliability is still being improved. There are a
number of possible ways to decrease the number of
errors that can occur. One problem is as the particle
filter tracks the root towards the tip, it is liable to
trace lateral roots if they are long enough and
provide a high enough quality measurement, as
shown in Figure 5. A simple way to remove this
problem is to simply trace the root from the end tip
upwards. Due to the geometry of the lateral roots the
tracing algorithm is then not presented with viable
alternative routes until the lateral roots join and
terminate. Therefore, the only way they can be
followed is if they lie parallel to the main root for
long enough, and are close enough for the particles
on the tracing algorithm to ‘jump’ across to the other
track. The difficulty with this approach, however, is
that the tracker would have to be started on the
thinnest, least visible section of the root, which may
be hard to detect, and automatic termination of the
tracking becomes harder as the delineation at the top
of the root is less clear.
Other general improvements include increasing
the resolution of the images, as during testing at
least some of the mis-tracing of the roots was due to
poor representation of the roots in the image.
Improving the measurement model may lead to less
problems with the system tracking lateral roots.
Finally, increasing the number of samples may be
beneficial, especially in combination with greater
image resolution. However, in such a case speed of
BIOSIGNALS 2008 - International Conference on Bio-inspired Systems and Signal Processing
114

traversal of the graph, which currently is near
instantaneous, might become a limiting factor.
5.3 Future Potential of the System
The particle filter approach, with or without mixed
state extensions, provides a general framework for
matching models of elongated structures to images
of those structures. By changing the models used it
may be possible to extract descriptions of and
measure a wide variety of roots and other plant
components. In particular, given higher resolution
(e.g. confocal) images showing the cellular structure
of the plant, it may be possible to predict (using the
motion model) and detect (using the appearance
model) higher level structures such as files of cells
of similar type.
The ability to recognise state changes by using a
mixed state, rather than pure particle filter, also
raises the possibility of recognising a wide variety of
events during plant growth, of which the onset of
gravitropic response may be just the first.
REFERENCES
Abramoff, M. D., Magelhaes, P. J., & Ram, S. J. (2004).
Image processing with ImageJ. Biophotonics
International, 11, 36-42.
Bauhus, J. & Messier, C. (1999). Evaluation of fine root
length and diameter measurements obtained using
RHIZO image analysis. Agronomy Journal, 91, 142-
147.
Blake, A. & Isard, M. (1998). Active Contours. (Second
ed.) Springer-Verlag.
Eshel, A. (1998). On the fractal dimensions of a root
system. Plant, Cell and Environment, 21, 247-251.
Isard, M. & Blake, A. (1998). A mixed-state
CONDENSATION tracker with automatic model-
switching. Proc 6th Int.Conf.Computer Vision, 107-
112.
King, O. & Forsyth, D. A. (2000). How does
CONDENSATION behave with a finite number of
samples? Proc.ECCV 2000, 695-709.
Mandelbrot, B. B. (1967). How long is the coast of
Britain? Science, 156, 636-638.
Pateña, G. F. & Ingram, K. T. (2000). Digital image
acquisition and measurement of peanut root
minirhizotron images. Agronomy Journal, 92, 544.
Qi, X., Qi, J., & Wu, Y. (2007). RootLM: a simple color
image analysis program for length measurement of
primary roots in Arabidopsis. Plant Root, 1, 10-16.
Smucker, A. (2007). WR-RIPL 2.0.
http://rootimage.css.msu.edu/WR-RIPL/index.html
Accessed 20-6-2007.
A PROBABILISTIC TRACKING APPROACH TO ROOT MEASUREMENT IN IMAGES - Particle Filter Tracking is
used to Measure Roots, via a Probabilistic Graph
115
