
ANALYSIS ALGORITHMS FOR A FIRST-AID SENSOR
Detecting Vitality Parameters such as Pulse and Respiration
Daniel Wettach, Marc Jaeger, Armin Bolz
Institute of Biomedical Engineering, University of Karlsruhe, Hertzstr. 16, Karlsruhe, Germany
Timur Oezkan
Department of Anaesthesiology, University Hospital Heidelberg, Germany
Keywords: Physiological processes, First-aid sensor, real-time sensor system, wearable sensor and system,
computational intelligence, emergency situation.
Abstract: In this paper the software algorithms necessary to analyze the signal provided by a first-aid sensor system
that detects pulse and respiration at a single point are described. In an opinion poll four of five
inexperienced first responders were interested in using this kind of system as support in emergency
situations. Especially the intelligent detection of respiration is hardly popular today and in most cases only
possible offline. The software also controls several visual indicators that assist the first aider in quickly
determining the state of the patient.
1 INTRODUCTION
In emergency situations like an accident a first aider
has to decide immediately if resuscitation of the
victims needs to be initiated. The know-how of
many first aiders is not sufficient or their uncertainty
too great to be able to make this often vitally
important decision quickly (Sefrin, 2006). Our aim
is to develop a cheap and portable sensor system that
is easy and fast to use to support the first-aider with
their vital decision. It detects if pulse and respiration
of the victim work normally and provides the first
aider with a visual aid. The sensor has to be placed
on the neck of the victim and after a few seconds it
starts to display information about pulse and
respiration.
2 SIGNAL PROCESSING
2.1 Medical Concept
It is our aim to develop a sensor which measures not
only the pulse but also the frequency of respiration,
that is why the detection of electrical body signals
e.g. like an ECG is not sufficient. One solution is to
measure mechanical changes of the tissue surface
which are caused by both pulse beat and respiration.
As possible measuring point for the sensor a point
near the clavicle is estimated to deliver the best
results because that point is close to both the
subclaviar artery and the trachea. This point is
shown in Fig. 1.
Figure 1: Possible measuring point for the sensor.
2.2 Signal Acquisition
The measuring of changes in the tissue surface is
mainly done by detecting changes in distance
between the sensor and the tissue surface. Normally
the measuring of distances can be achieved by using
an LC oscillator. Due to capacitive coupling the
resonance frequency of the oscillator changes if the
259
Wettach D., Jaeger M., Bolz A. and Oezkan T. (2008).
ANALYSIS ALGORITHMS FOR A FIRST-AID SENSOR - Detecting Vitality Parameters such as Pulse and Respiration.
In Proceedings of the First International Conference on Bio-inspired Systems and Signal Processing, pages 259-262
DOI: 10.5220/0001064802590262
Copyright
c
SciTePress
distance to any organic object in- or decreases. This
change in resonance frequency is reflected in a
change of voltage. This principle is used in homes in
the form of touchless switches. However, since the
changes in the tissue surface caused by pulse beat
and respiration are very small, the use of classical
LC oscillators is - apart from a few exceptions - not
possible. Therefore a new nonlinear oscillator has
been developed. With its help it is possible to
measure changes in submillimeter range. Because of
this high sensitivity even little muscle contractions
will be detected by the sensor. As some of these
minor contractions do belong to neither pulse nor
respiration they have to be eliminated. It is
necessary to filter and process the signal to eliminate
these artifacts. An example for the measured signal
is shown in Fig. 2. For more technical information
please refer to (Jaeger, 2007).
Figure 2: Signal measured by the sensor.
2.3 Algorithms
First the signal is band-filtered with hard coded cut-
off frequencies covering the whole spectrum of
possible pulse and respiration frequencies. In the
next step a low resolution FFT of this filtered signal
is performed. In extreme cases the respiration
frequency can be higher than the pulse frequency.
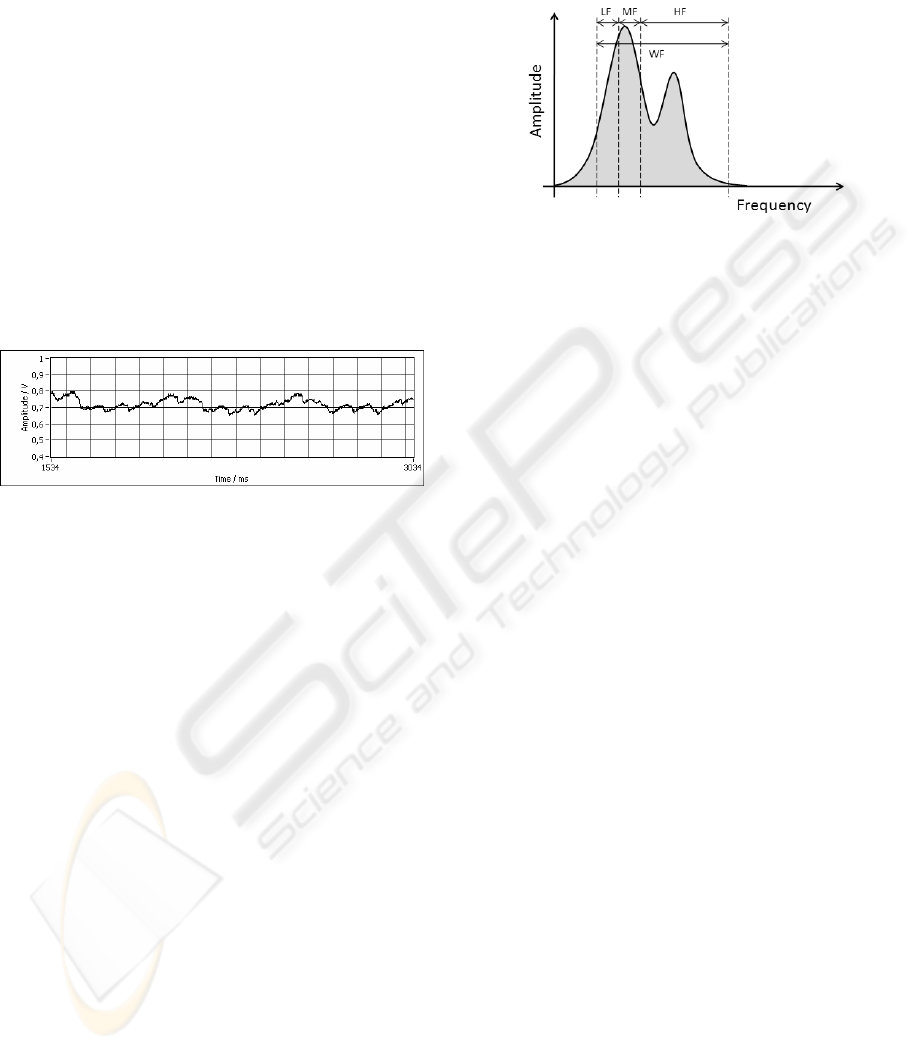
Due to this there are four possible frequency bands
(Fig.3):
- the whole frequency band from the lowest
possible frequency of the respiration to the
highest possible frequency of the pulse (WF)
- the lower frequency band of respiration
from the lowest possible frequency of the
respiration to the lowest possible frequency of
the pulse (LF),
- the upper frequency band of pulse, from
the highest possible frequency of the respiration
to the highest possible frequency of the pulse
(HF)
- and the overlapping band from the lowest
possible frequency of the pulse to the highest
possible frequency of the respiration (MF).
By calculating relations between the different
amplitudes, the frequency parts with high intensity
can be discerned. Normally there will be only two
frequency parts with high intensity representing
pulse and respiration.
Figure 3: Spectrum of the filtered signal with four
frequency bands.
If there are more than two such frequency parts,
there has to be a measurement error. If no error is
detected the frequency parts defined above can be
analyzed further. If there is a frequency part of high
intensity in the lower frequency band of respiration,
there may be only one such frequency part in the
overlapping band - the one of the pulse. If such a
frequency part is additionally detected in the upper
frequency band of the pulse there cannot be any in
the overlapping band. As soon as these conditions
are met, the frequencies for pulse and respiration are
approximately determined. With the detected
frequencies it is possible to define narrow cut-off
frequencies for pulse and respiration. With these
cut-off frequencies the input signal is filtered again,
once for pulse and once for respiration.
After this step there are two rather clear signals
which are relatively free of errors.
With these
filtered signals it is possible to determine more exact
frequencies for pulse and respiration. Therefore the
filtering is designed to adapt which means that the
cut-off frequencies of the fine filters are always
readjusted using the frequencies determined by the
fine filtered signals. Additionally the approximated
frequencies of pulse and respiration gained from the
roughly filtered input signal are used to validate the
adjustment of the cut-off frequencies for the fine
filters. The determination of the frequency of the
fine filtered signal works as follows: On the one
hand zero-crossings are counted using a hysteresis,
on the other hand a high resolution FFT for the
filtered signals is processed. Both results undergo a
plausibility check.
The frequency determination by counting zero-
crossings is done by using hysteresis. A zero-
crossing is only interpreted as such if the signal does
not only drop below a lower hysteresis border but
BIOSIGNALS 2008 - International Conference on Bio-inspired Systems and Signal Processing
260

then also rises over an upper hysteresis border. The
point in time in which the signal rises over the upper
hysteresis border is used as zero-crossing. The time
difference between two such points can be
interpreted as the periodic time of the signal. The
reciprocal of this periodic time is the frequency of
the signal. To get a more stable frequency value the
last two periodic times determined in this way are
averaged. If the signal does not pass a hysteresis
border for a certain period of time its quality is
assumed to be insufficient and the frequency value
will be set to zero.
When the frequency is determined by using a high
resolution FFT the frequency part with the highest
amplitude is used as result. To get a more reliable
value the algorithm averages out the last five
determined frequency values.
Figure 4: Logical organization of the plausibility check.
To eliminate remaining errors a plausibility
check is done using the determined frequency values
by counting zero-crossings and FFT. Fig. 4 shows
the logical organization of the plausibility check.
As soon as both methods - counting zero-
crossings and FFT - calculate approximately the
same frequency value the signal is assumed to be
free of errors and the value calculated by FFT will
be indicated as final result. If this value deviates too
much from the previous shown result an error will
be assumed. In this case the last correct value prior
to the error is indicated until both methods once
again calculate an approximately equal value. If the
value determined by counting zero-crossings drops
below a predetermined border, the signal is assumed
to be too weak and the final frequency value will be
set to zero.
Fig. 5 shows the chronological sequence of
possible results of the two methods counting zero-
crossings and FFT and the corresponding result of
the plausibility check (frequency line in Fig. 5).
Figure 5: Possible chronological result of the plausibility
check.
2.4 Visualization
The sensor uses LEDs to indicate the state of a
patient. For both pulse and respiration there is a
LED showing if the respective function works
normally. If either pulse or respiration are abnormal,
it will be shown by an additional LED. A fourth
LED indicates that the sensor system is working
correctly to avoid any delay due to unrecognized
malfunctions. The sensor with its LEDs is shown in
Fig. 6.
Figure 6: The Sensor with the four LEDs.
If the LEDs indicate that pulse and/or respiration
does not work normally and the patient does not
show any reactions to external stimulation the first
aider has to initiate cardiopulmonary resuscitation
(CPR).
ANALYSIS ALGORITHMS FOR A FIRST-AID SENSOR - Detecting Vitality Parameters such as Pulse and Respiration
261

3 APPLICATION
The following diagram (Fig. 7) shows the sequence
from the arrival of a first aider at an accident up to
the corresponding action he has to take.
Figure 7: First aider mode of operation.
4 RESULTS
The developed algorithms have been tested with
several signals recorded by the sensor. The time it
took the software to detect each the pulse and the
respiration signals has been put in relation to the
overall time of the measurement. The results are
shown in Table 1. The sensor is able to detect pulse
in 91.15% and respiration in 81.15% of the time the
sensor is active. The timeframe during which pulse
and respiration are not detected is mostly at the
beginning of the measurement because at least one
or two cycles are necessary to calculate useful
values. The lower percentage for respiration
detection can be explained with the lower breathing
frequency due to which the initial cycles take longer
to complete.
Table 1: Test cases for pulse and respiration.
Signal
length in s
Pulse detected
in %
Respiration
detected in %
75.txt 132,92 92,33 87,71
84.txt 191,55 97,49 92,69
87.txt 97,90 95,86 85,41
90.txt 80,63 94,51 78,69
137.txt 76,13 96,69 79,64
190.txt 119,59 97,12 71,99
carotis.txt 29,22 83,06 57,56
kieferwinkel.txt 169,61 97,70 91,16
sternoclaido.txt 199,36 83,74 82,68
subclavia.txt 74,99 73,00 84,00
5 DISCUSSION
The results shown in Table 1 are not satisfying
because they were not verified by comparing them
to actual pulse and respiration data detected by other
means. In addition the sensor has to be tested in
extreme situations for instance on board of rescue
helicopters and ambulances again while comparing
the sensor data to actual pulse and respiration data.
According to these test results - like possible
deviations of the sensor detected data from the
actual pulse and respiration - the algorithms will
have to be improved. The main task in the future
will be to find ways to correct inaccuracies caused
by small movements. This could be done for
example by integrating a neural fuzzy system into
the software that can use additional criteria to
ascertain that the calculated values are correct.
Another possibility is to include an acceleration
sensor in the system that is able to detect certain
movements and to correct the data accordingly.
REFERENCES
P. Sefrin, 2006, Bei der Reanimation gilt ab sofort: Zuerst
30 mal das Herz massieren und dann zweimal
beatmen, Aerztezeitung
M. Jaeger, M. Mueller, D. Wettach, T. Oezkan, J. Motsch,
T. Schauer, R. Jaeger, A. Bolz, 2007, First-Aid sensor
system: New methods for single-point detection and
analyzation of vitality parameters such as pulse and
respiration, IEEE EMB, ISBN 1-4244-0788-5
BIOSIGNALS 2008 - International Conference on Bio-inspired Systems and Signal Processing
262
