
TRAFFIC SURVEILLANCE USING GABOR FILTER BANK
AND KALMAN PREDICTOR
Mehmet Celenk
1
, James Graham
1
and Santosh Singh
2
1
School of Electrical Engineering and Computer Science, Ohio University, Athens, OH 45701, USA
2
Corporate Technology-India, Siemens Information Systems Ltd., Bangalore, India
Keywords: Traffic surveillance, Gabor-filter bank, motion detection, non-linear Kalman filtering, scene prediction.
Abstract: This paper builds upon our earlier work by applying an optimized version of our non-linear scene prediction
method to traffic surveillance video. As previously, a Gabor-filter bank has been selected as a primary
detector for any changes in a given image sequence. The detected ROI (region of interest) in arbitrary
motion is fed to a non-linear Kalman filter for predicting the next scene in time-varying video, which is
subject to prediction error invalidation. Potential applications of this research are mainly in the areas of
traffic control and monitoring, traffic flow surveillance, and MPEG video-compression. The reported
experimental results show improved performance over the non-linear Kalman filtering based scene
prediction results in our previous work. The low least mean square error (LMSE), on the average of about 2
to 3 % remains close to the average reported in our earlier work, however, the fluctuations in error have
disappeared, proving the reliability of the approach to traffic-motion prediction.
1 INTRODUCTION
Over the last decade, the prediction of 2-D or 3-D
scenes and the changes therein has become an
increasingly popular research area (e.g., Kim and
Woods (1998), Irani and Anandan (1998), Hoover et
al. (2003), and Sawhney, et al. (2003)). This is due
to its potential applications in unmanned navigation
and guidance, surveillance, tracking, MPEG video
compression, virtual world simulation, multimedia
networking, animation, search and rescue. Two
popular tools for these endeavors are the Kalman
and Gabor filters. The Kalman filter (KF) is one of
the most widely used methods for tracking and
estimation because of its simplicity, optimality,
tractability and robustness as reported in
Roumeliotis and Bekey (2000a and 2000b) and
Dorfmüller-Ulhaas (2003). In this study, we predict
the changes in an arbitrary scene setting using a
Kalman predictor. However, a direct use of the
Kalman filter with a nonlinear system can be
difficult. An effective method for alleviating
nonlinearity is to use an extended Kalman filter
(EKF) (Sorenson, 1985) as an estimator by
linearizing all the nonlinear parameters in a
nonlinear system (Julier and Uhlmann, 1987). The
Gabor filter (Theodoridis and Koutroumbas, 2006)
has been proven to be useful for filtering based on
texture differences within an image and is used in
areas such as texture segmentation, document
analysis, edge detection, retina identification,
fingerprint processing, and image coding and
representation. An example is Macenko et al.’s work
(2007), which provides both a good explanation of
the approach to using Gabor filtering and a highly
relevant practical application in lesion detection
within the brain. In this work, the prediction of
frame to frame movement of the selected ROI in a
given traffic image sequence is carried out by using
a bank of Gabor filters to determine the region of
interest (ROI), followed by the application of a
nonlinear Kalman filter to the ROI to predict
movement. Many other traffic surveillance and
prediction methods have been proposed and
implemented (e.g., (Huang and Russell, 1998),
(Koller, et al., 1994), (Bramberger, et al., 2004),
(Wang, et al., 2006), (Cheung, et al. 2005), (Celenk
et al., 2007a and 2007b). The work presented by
Maire and Kamath (2005) is similar to ours in the
respect that the goal is to track traffic; however, our
approach uses a more robust ROI detection method
with the use of Gabor filtering to capture shapes via
texture difference and is not normally applied to an
619
Celenk M., Graham J. and Singh S. (2008).
TRAFFIC SURVEILLANCE USING GABOR FILTER BANK AND KALMAN PREDICTOR.
In Proceedings of the Third International Conference on Computer Vision Theory and Applications, pages 619-622
DOI: 10.5220/0001070506190622
Copyright
c
SciTePress
estimation problem such as this one. Kalman
filtering is not typically used in image prediction or
paired with Gabor filtering as claimed to be one of
the objectives herein. Furthermore, our Kalman
predictor is able to adjust its prediction results as the
input scene domain changes while the dual Kalman
filtering method presented by Roumeliotis and
Bekey (2000a), for example, makes use of a scene-
domain model (i.e., no adaptability). The following
sections describe the overall approach, experiments,
and results obtained. Conclusions and future study
are given at the end.
2 DESCRIPTION OF APPROACH
This paper takes the approach described in our
earlier work (2007b) toward the scene prediction
problem by using both Kalman and Gabor based
filtering. Prediction of an entire image is not
necessarily useful, desired, or even practical.
Because of this, Gabor filtering helps determine a
ROI in which to generate prediction results. The
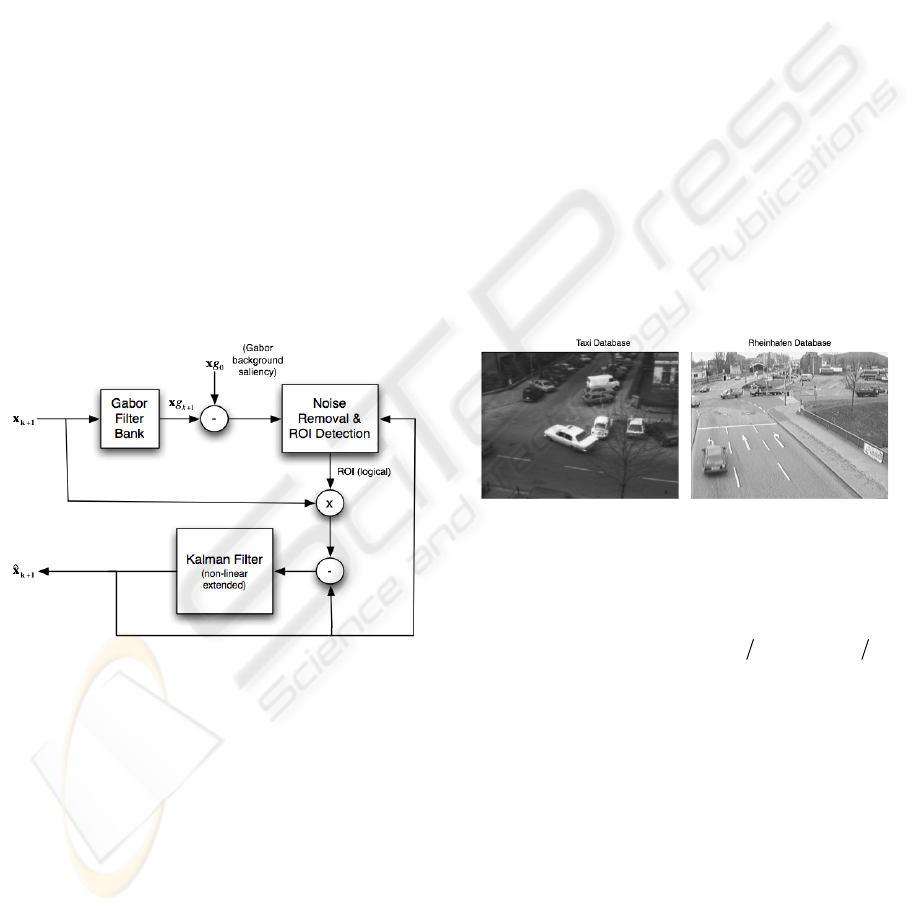
basic algorithm flow is shown in Figure 1.
Figure 1: Algorithm flowchart.
Here, the current frame is fed to a Gabor filter bank
which calculates the output images for a series of
Gabor filters with varying orientations. The filter
bank will cover the spatial-frequency space and
capture the essential shape information. Gabor
output images are employed to generate a combined
saliency map. Moving object bounding boxes are
created with the saliency image and previous error
results from the Kalman filter. Overlapping
boundary boxes are combined and boxes common to
both are used to determine the logical ROI (region of
interest). The ROI’s relevant portion of the image is
passed onto the extended Kalman filter.
3 EXPERIMENTAL RESULTS
A pair of data sets is used in experimentation from
the Institute for Algorithms and Cognitive Systems
of Karlsruhe University’s traffic image sequence
database, specifically, the Taxi sequence and the
Rheinhafen sequence. The Taxi sequence was
chosen for its relative simplicity, while the
Rheinhafen sequence was chosen for its multiple
trackable vehicles and more “normal” imagery. It is
normal in the sense that there are a fair number of
detection errors. Images provided in the databases
are in 2-D intensity format. Since depth information
is not provided, the Kalman filter models pixel
intensity. The 2-D scene data used for this
experiment is from a static surveillance camera,
meaning the camera’s position is fixed. In the
collected images, only the scene contents move
while the camera remains stationary. The Taxi and
Rheinhafen images have been converted into JPEG
images with resolutions of 256x191 and 688x565,
respectively. Figure 2 shows a pair of example
images from the selected databases depicted the
scenes from which they were acquired.
Figure 2: Scenes from Taxi and Rheinhafen databases.
In our implementation, we follow the same discrete
formulation of the Gabor filter as Macenko[11],
which specifies the Gabor filter variables to be
S
x
=
1, S
y
=
1, and
θ
=
0,
π
4,...,
π
,..., 7
π
4
{}
.
Eight different orientations for the Gabor bank are
adapted since more would not provide any
significant improvement and fewer would likely not
discern enough about the image. Upon passing the
image through the filter bank a combined saliency
image is created. The saliency image has the
background saliency image subtracted to leave only
the correct region of interest (ROI). The resulting
ROI image is then passed through a noise reduction
and blocking filter to remove “specks” which results
from small background changes and to “block out”
the ROI to give it slightly better coverage. Figure 3
illustrate the process of determining the ROI. Image
(a) shows the Gabor saliency image for the
background, while image (b) shows the Gabor
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
620
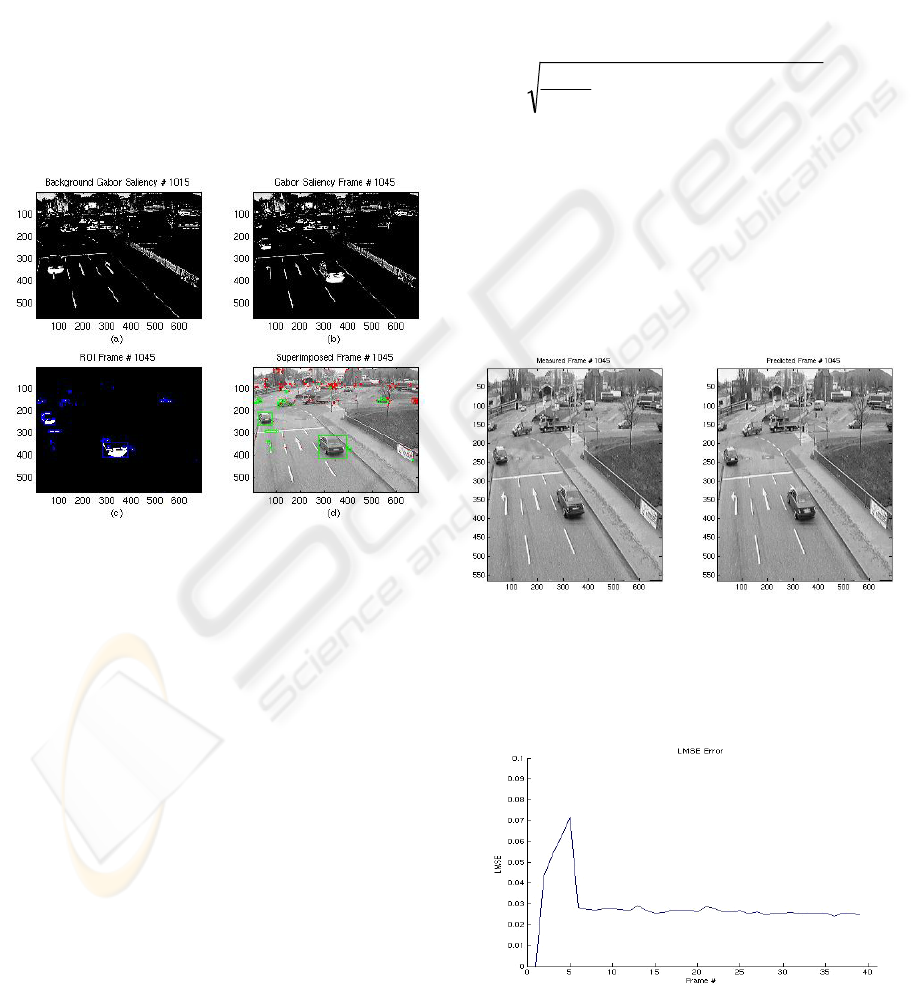
saliency for the current frame. The next image,
image (c), depicts the result of the noise removal and
black and white conversion of the previous image.
The final image, (d), shows the results of “boxing”
the ROI. To generate this last image, the ROI is
combined with the previous cycle’s Kalman error to
generate a number of boundary boxes. These boxes
are then combined or removed as needed depending
on their relative positions to each other and their
relationship with the known ROI. In the image
below the green regions are those associated with
the ROI, while the red regions are those that have
been “thrown away.” The blocking ensures that most
of the pixels immediately surrounding the region of
interest get included in the Kalman filter estimations
and has the secondary effect of allowing actual
tracking of moving objects.
Figure 3: Gabor filter results for frame #1045 of the
Rheinhafen database.
Next, the superimposed frame containing the
selected ROI (the green boxes) is passed on to the
Kalman filter. The Kalman filter is then applied to
the region of interest. To alleviate computational
time issues and better handle the uneven lines of the
ROI, the filter is run on 3x3 subsets or blocks of the
total image. A 3x3 pixel filter is run for each frame,
and the predicted results are then combined to create
a full scene image array. In experimentation, the
pixel noise value (pn
ij
) is assumed to be zero, and
velocity is not taken into account. The state
transition matrix
k
φ
is adjusted for a 3x3 window
based Kalman filter realization as a 27x27 matrix
given by
φ
k
=
III
0 II
00I
⎡
⎣
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
where I is a 9x9 identity matrix and 0 is a 9x9 zero
matrix. The noise variance (
σ
ij
2
) is considered as
white Gaussian noise with a value of 0.25. In our
experiment the pixel noise (pn
ij
) is assumed to be 0,
and the velocity noise (vn
ij
) is taken to be 1 m/s.
The prediction error, e, for the described method is
calculated between the observed
)(
1+k
f
and
predicted
)(
1+k
f
)
images following the k
th
iteration in
the least mean square sense (LMSE). The LMSE
computation is carried out over the whole image
frame of size M x N at pixel level (i,j) using
e =
1
M ⋅ N
ˆ
f
k +1
i, j
()
− f
k +1
i, j
()
()
2
∑∑
(1)
Figure 4 gives an example of the prediction results
for the same frame of the Rheinhafen database
shown above. The measured frames represent the
actual frame, while the predicted frame is the frame
predicted from the previous cycle. Discrepancies
tend to occur because the section of the image that
they are associated with is not part of the region of
interest but instead part of the background of their
particular frame and, thus, not tracked.
Figure 4: Prediction results.
Figures 5 and 6 present the LMSE error results for
all 41 frames of the Taxi database and frames 1015
to 1055 of the Rheinhafen database.
Figure 5: LMSE results for the Taxi database.
TRAFFIC SURVEILLANCE USING GABOR FILTER BANK AND KALMAN PREDICTOR
621

Figure 6: LMSE results for the Rheinhafen database.
4 CONCLUSIONS
This work has the objective of predicting mobile
objects in video scenes as the camera or sensory
device mounted on a platform remains stationary.
Unlike existing target detection and tracking
research, it makes use of Gabor filtering (and
boundary box method) to select the ROI and a
nonlinear extended Kalman filtering as a feedback
mechanism to accurately track the moving targets
and predict their locations ahead of time. The
reported experimental results demonstrate that the
nonlinear Kalman filtering based scene prediction
performs well and can accurately estimate the next
frames in images to a certain degree of accuracy.
The low LMSE error measurement of the nonlinear
filter prediction, on the average of about 2 to 3 %,
proves the reliability and robustness of this approach
to time-varying image data processing. The
presented results are reasonably low in error for low-
cost visible and IR camera applications [17, 21].
Potential areas for future research lie in devising an
ROI tracking mechanism in lieu of semantic
information and improvements to the Kalman
filtering algorithm to adjust itself for high-level
visual clues. The magnitude of the prediction error
involving initial frames indicates that further work is
needed for the performance improvement.
REFERENCES
Bramberger, M., et al. (2004) Real-time video analysis on
an embedded smart camera for traffic surveillance. In
Proc. of 10
th
IEEE RTAS Symp., pp. 174-181.
Celenk, M., et al., (2007a) A Kalman filtering approach to
3-D IR scene prediction using single-camera range
video,” in Proc. IEEE ICIP, San Antonio, TX.
Celenk, M.,et al. (2007b) Non-linear IR scene prediction
for range video surveillance. In 4
th
Joint IEEE Int.
Workshop on OTCBVS’0), Minneapolis, MN
Cheung, S.Y., et al., (2005) Traffic surveillance with
wireless magnetic sensors. In Proc. 12th ITS World
Congress, San Francisco, Nov. 2005.
Dorfmüller-Ulhaas, K. (2003) Robust optical user motion
tracking using a Kalman filter. Technical Report.
University of Augsburg, May 2003.
Hoover A., et al., (2003) Egomotion estimation of a range
camera using the space envelope. IEEET-SMCB,
33(4), pp. 717-721.
Huang, T. and Russell, S. (1998) Object identification: A
Bayesian analysis with application to traffic
surveillance. Artificial Intel., 103(1), pp. 77-93.
Institute for Algorithms and Cognitive Systems, Image
Sequence Server, Karlsruhe University,
<http://i21www.ira.uka.de/image_sequences >.
Irani, M., and Anandan P. (1998) A unified approach to
moving object detection in 2D and 3D scenes. IEEET-
PAMI, 20(6), pp. 577-589.
Julier, S. J. and Uhlmann, J. K. (1997) A new extension of
the Kalman filter to nonlinear systems. In Proc. of
AeroSense, Orlando, FL
Kim, J. and Woods, J.W. (1998) 3-D Kalman filter for
image motion estimation. IEEET-IP, 7(1), pp. 42-52.
Koller, D., et al,. (1994) Towards robust automatic traffic
scene analysis in real-time. In Proc. IAPR.
Macenko, M., et al., (2007) Lesion detection using Gabor-
based saliency field mapping. Medical Imaging 2007,
Proc. SPIE Vol. 6512, Feb. 17-24, San Diego, CA.
Maire, M. and Kamath, C. (2005) Tracking Vehicles in
Traffic Surveillance Video. Lawrence Livermore
National Lab., Technical Report UCRL-TR-214595.
Roumeliotis, S. I. and Bekey, G. A. (2000a) SEGMENTS:
A Layered, Dual-Kalman filter Algorithm for Indoor
Feature Extraction. Proc. IROS 2000, pp. 454-461.
Roumeliotis, S. I. and Bekey, G. A. (2000b) Bayesian
estimation and Kalman filtering: A unified framework
for Mobile Robot Localization. Proc. IEEE Conf.
Robotics and Autom., pp. 2985-2992.
Sawhney, H.S, et al., (2000) Independent motion detection
in 3D scenes. IEEET- PAMI, 22(10), pp. 1191-1199.
Sorenson, H. W. (1985) Kalman Filtering: theory and
application. IEEE Press, 1985.
Theodoridis, S. and Koutroumbas, K. (2006) Pattern
Recognition. 3
rd
ed., Academic Press.
Wang, Y., et al. (2006) Renaissance: A real-time freeway
network traffic surveillance tool. In IEEE ITSC '06.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
622
