
WAVELET TRANSFORM FOR PARTIAL SHAPE RECOGNITION
USING SUB-MATRIX MATCHING
El-hadi Zahzah
Laboratoire de Math´ematiques Appliqu´ees, Avenue M Cr´epeau La Rochelle 17042, France
Keywords:
Dyadic Discrete Wavelet Transform, Decimation, Affine Transform, Partial Shape Matching, Object Retrieval,
Distance Matrix, Sub-Matrix Matching.
Abstract:
In this paper, we propose a method for 2D partial shape recognition under affine transform using the discrete
dyadic wavelet transform invariant to translation well known as Stationary Wavelet Transform or SWT. The
method we propose here is about partial shape matching and is based firstly on contour representation using the
wavelet transform. A technique of sub matrix matching is then used to match partial shapes. The representation
is based on three steps, the contour is first parameterized by enclosed area, the affine invariant feature is then
calculated to finally determine the natural axis which enable to fix the starting point. The knowledge of
the orientation of the natural axis enables to adjust the starting point on the contour between the query and
the models in a given database. Furthermore, the method can selects a subset of useful invariant features
for the matching step. A sub-matrix matching algorithm developed by (Saber et al., 2005)is then used to
determine correspondences for evaluation of partial similarity between an example template and a candidate
object region. The method is tested on a database of 5000 fish species, and the results are very satisfactory.
1 INTRODUCTION
Object recognition is a main problem in computer vi-
sion. Literature is abundant in this field. These works
belong to two main categories: methods based on
contour and methods based on region. The criterion
used to classify a method to one category or another,
is to see if the descriptor is calculated on the contour
or on the region. For a good overview of the vari-
ous representation, description and recognition tech-
niques see (Zhang and Lu, 2004). Although methods
based on region seem to be more general comparing
to methods based on contour, in many applications
they require more data and are more time consum-
ing. Our work limits to the first case, taking into ac-
count only the contour object. In (Mallat, 1989), the
author describes a mathematical model to calculate
and interpret the concept of multi-resolution (multi-
scale) representation. Mallat shows that information
can be extracted from two successive resolutions and
he then defines a new and complete representation
well known as wavelet representation. This represen-
tation is widely used in computer vision and signal
processing. In (Mallat, 1991), the author studies also
the completeness, the stability and the application to
the recognition of the model based on zero-crossings
representation. The discrete wavelet transform in-
variant to translation introduced by Mallat in (Mallat,
1991), called later in (Misiti et al., 2003), Stationary
Wavelet Transform (SWT) which is the non decimated
version of the classical dyadic discrete wavelet trans-
form (DWT). The SWT is often used for 2D shape
recognition. Tieng et al. use this transform to de-
duce the contour representation by the zero-crossings
in (Tieng and Boles, 1997a) and by the extremums
in (Tieng and Boles, 1997b), but these methods need
post processing to remove the false zero-crossings or
false extremum. In (Kimcheng and El-hadi, 2004),
we proposed another approach for 2D shape recog-
nition under affine transform. The method is based
on the parameterization by the enclosed area. We
develop a technic to align the starting point between
the model of the database and the query. The gen-
eral scheme of this process is illustrated in the figure
(1). The different steps are detailed in the following
sections. In this paper we add to our representation a
sub-matrix matching algorithm developedby E. Saber
et al in (Saber et al., 2005). This algorithm is pro-
posed to determine correspondances for evaluation of
partial similarity between an example template and a
candidate object region. The method is translation,
513
Zahzah E. (2008).
WAVELET TRANSFORM FOR PARTIAL SHAPE RECOGNITION USING SUB-MATRIX MATCHING.
In Proceedings of the Third International Conference on Computer Vision Theory and Applications, pages 513-517
DOI: 10.5220/0001078905130517
Copyright
c
SciTePress

Parametrization
Contour
Resampling
SWT
Affine Invariant
Natural Axis
Subset
affine invariant
Descriptor
Normalized Parametrezation
Figure 1: General scheme of the different stages for the de-
scriptor construction.
rotation, scale and reflection invariant. Applications
of the proposed partial matching technique include
recognition of partially occluded objects in images.
2 PARAMETERIZATION
2D shape recognition under affine transform uses gen-
erally two types of parameters as detailed in (Khalil
and Bayoumi, 2001), (Khalil and Bayoumi, 2002)
and (Tieng and Boles, 1997b): The parameterization
by the affine length and by the enclosed area. The
first type needs the derivative of high order and then
are very sensitive to quantization and to noise. We
adopt the second type of parameterization,using the
enclosed area defined by:
s(t) =
1
2
Z
t
a
|x(u)y
′
(u) − x
′
(u)y(u)|du (1)
in the discrete case this formula may rewritten as:
s(k) =
0if k=1,
1
2
∑
k−1
t=1
|x(t)y(t + 1) − x(t+ 1)y(t)|
otherwise.
(2)
this parameter is based on the affine transform
property which assess that is ”under affine transform,
the objects areas change in the same proportion”.
3 THE AFFINE INVARIANT
In this section, we show how to obtain the affine
invariant from the coefficients of the SWT. Others
methods to obtain the affine invariant can also be use
as those proposed as in (Tieng and Boles, 1997b) and
(Khalil and Bayoumi, 2001). Let’s assume that the
contour
˜
Γ( ˜x
i
, ˜y
i
) is the affine transform of a given con-
tour Γ(x
i
,y
i
), ie.
˜x
i
= a
1
x
i
+ a
2
y
i
+ t
1
; ˜y
i
= b
1
x
i
+ b
2
y
i
+ t
2
(3)
where 1 ≤ i ≤ N, a
j
, b
j
, 1 ≤ j ≤ 2 are the coef-
ficients of the affine transform with the determinant
of the affine matrix transform a
1
b
2
− a
2
b
1
is non zero
and t
1
, t
2
represent respectively the translation in x
and y axis of the contour. As the origin is previously
shifted to the centroid, we get t
1
= t
2
= 0. Conse-
quently, if the SWT is applied for both previous equa-
tions one obtains
A
l
˜x
i
W
l
A
l
˜x
i
A
l
˜y
i
W
l
˜y
i
=
a
1
a
2
b
1
b
2
·
A
l
x
i
W
l
x
i
A
l
y
i
W
l
y
i
(4)
where A
l
x
i
and W
l
x
i
for 1 ≤ i ≤ N represent re-
spectively the ith approximation and the detail coeffi-
cient of the decomposition of x = (x
i
)
1≤i≤N
by SWT
at level l. If we note
M
l
(i) = A
l
x
i
W
l
y
i
− A
l
y
i
W
l
x
i
(5)
we obtain
˜
M
l
(i) = (a
1
b
2
− a
2
b
1
)M
l
(i) (6)
then M is a relative invariant. M
l
(i) is normalized by
M
k
( j) to obtain the absolute invariant I.
I
l
(i) = M
l
(i)/M
k
( j) (7)
To reduce the noise effect on the invariantI, the level k
is selected if the magnitude sum (in absolute value) of
equation (5) is the greatest value. The value of j cor-
responds to the position where the magnitude (in ab-
solute value) of equation (5) is maximale as in (Tieng
and Boles, 1997b).
k = argmax
1≤l≤n
N
Σ
j=1
[M
l
( j)]
2
; j = argmax
1≤i≤N
|M
k
(i)|
4 THE NATURAL AXIS
In section 3, One assumes that the starting point on
the contour
˜
Γ and Γ are the same. In practice, this
assumption is not true since one cannot has
˜
I
l
(i) =
I
l
(i). However, if the contour
˜
Γ is the affine transform
of the contour Γ, then, one can shows that exist an
integer number τ such as :
˜
I
l
(i+ τ) = I
l
(i), 1 ≤ i ≤ N (8)
Actually, τ is the required shift to adjust the start-
ing point of the contour
˜
Γ and Γ. In practice we can-
not know a priori the value of τ, because we do not
know whether yes or not the query is an affine trans-
form of the model, and how to match points. The
value of τ can be estimated by computing the correla-
tion between I et
˜
I, ie.:
τ = argmax
1≤ j≤N
N
Σ
1=1
˜
I
l
(i+ j)I
l
(i)) (9)
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
514

However, this calculus is relatively heavy. An-
other way to obtain this value is to use the Natural
Axis as in (Shen et al., 1999). The technic principle in
a general framework is as follow: One starts from an
ordered set S = {s
i
, 1 ≤ i ≤ N} (in our case S is the
set of values I
l
(i)), one associates to S the necklace of
radius one and N pearls. To each pearl correspond a
weight s
i
. The distance between two successive pearls
is equal to 2π/N. The natural axis of the set S of the
N pearls necklace is represented by a vector with an
origin in the center of the necklace, and the extremity
is a point with coordinates (X
natural
,Y
natural
) defined
by:
X
natural
=
N
∑
i=1
s
i
cos(
2π
N
(i− 1));
Y
natural
=
N
∑
i=1
s
i
sin(
2π
N
(i− 1)) (10)
5 THE CONTOUR DESCRIPTOR
In the above section 3, we showed how to obtain
the affine invariant I
l
(i) from the SWT coefficients
and we also how to obtain the correspondence be-
tween (
˜
I
l
(i))
1≤i≤N
and (I
l
( j))
1≤ j≤N
using the nat-
ural axis orientation. The SWT transform is a non
decimated version of the DWT, so it is redundant as
the I
l
invariant is. To avoid this redundancy and to
keep the invariant values useful for the contour de-
scription, we remove from the invariant I
l
all values
which not correspond to the invariant obtained from
the DWT on the contour (x
i
,y
i
)
1≤i≤N
. In (Misiti et al.,
2003), the author showed that giving a SWT set coef-
ficients, it is possible to get all the DWT ε-decimated
for any sequence ε = [ε
1
ε
2
...ε
n
] with ε
j
= 0 or 1 for
all 1 ≤ j ≤ n. In a same way, it is possible to obtain
the descriptors ε-decimated of the invariant I
l
by the
following relation: D
l
= (D
l
( j))
1≤ j≤2
n−l
=
(I
l
(ind),I
l
(ind + 2
l
),...,I
l
(ind + (2
n−l
− 1)2
l
)) with
ind = 1 +
∑
l
i=1
ε
i
2
i−1
. Note that there is N = 2
n
pos-
sible descriptors. Furthermore, to make our algorithm
more efficient, only a subset of descriptors with scale
from K to L, K ≤ L, is used. The selection of these
scales are automatically performed, using the level
histogram, such the vector magnitude (I
l
) 1 ≤ l ≤ n
of equation (7) is maximal.
6 THE PARTIAL-SHAPE
MATCHING
The method described above is not adapted to open
curves. In real applications and depending of the
image quality, the contours are generally open even
using effective segmentation methods. The opening
may also be due to objects occlusion. Much efforts
has been devoted of finding effective methods for
recognition of partially occluded objects. The dis-
parity matrix to perform similarity matching of oc-
cluded objects modeled by line segments has been
used by many authors as in (Price, 1984) and (Bhanu
and Ming, 1987). Khalil and Bayoumi in (Khalil and
Bayoumi, 2002) proposed to use maxima lines of the
continuous wavelet transform and recognize occluded
objects by identifying singularities on their bound-
aries. In this paper, we use the method of partial shape
matching based on features extracted by the wavelet
transform. Actually, the shape descriptor used is the
affine wavelet descriptor, and its coefficients are used
in the sub-matrix matching algorithm proposed by E.
Saber et al in (Saber et al., 2005). In the following
section, we recall this method.
6.1 Distance Matrix
The distance Matrix represents the proximity of fea-
ture points within each example template or potential
object region in order to determine complete or partial
correspondances between two sets of feature points.
Let (Xi,Yi), i = 1,2,...,n, be feature points for a po-
tential object region or example template contour; the
distance matrix D for the contour is defined as
D =
d
11
d
12
··· d
1n
d
21
d
22
··· d
2n
.
.
.
.
.
.
.
.
.
.
.
.
d
n1
d
n1
··· d
nn
(11)
where d
kl
=
p
(X
k
− X
l
)
2
+ (Y
k
−Y
l
)
2
, k,l =
1,2, ...,n denotes the distance between the feature
points k and l along the contour. The distance ma-
trix is a symmetric matrix,and is invariant to transla-
tion and rotation by definition, since it only depends
on distances between feature points; (2) invariant to
isometric scale variation of a contour, i.e. zoom or
contraction, since that corresponds to scaling all dis-
tances by a constant factor; (3) reflection of a con-
tour is equivalent to reordering of feature points in the
clockwise or counter clockwise direction essentially
inverting the initial ordering, and (4) if two contours
partially match, their distance matrices have match-
ing sub-matrices. The distance matrix depends on
WAVELET TRANSFORM FOR PARTIAL SHAPE RECOGNITION USING SUB-MATRIX MATCHING
515
which feature point is selected as the reference (start-
ing) point for enumeration of points along the contour.
For example, if (X
k
,Y
k
) were selected as the reference
point, the new distance matrix becomes.
˜
D =
d
kk
d
k(k+1)
·· · d
k1
·· · d
k(k−1)
d
(k+1)k
d
(k+1)(k+1)
·· · d
(k+1)1
·· · d
(k+1)(k−1)
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
d
1k
d
1(k+1)
·· · d
11
·· · d
1(k−1)
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
·· ·
d
(k−1)k
d
(k−1)(k+1)
·· · d
(k−1)1
·· · d
(k−1)(k−1)
(12)
Note that D and
˜
D are related by a circular shift,
that is D can be obtained by shifting
˜
D by (k − 1)
rows up and (k − 1) columns to the left. This is im-
portant because starting points for enumerating fea-
ture points on a potential object region and an ex-
ample template may differ. However, this does not
pose a difficulty in finding partial matches between
the two. Sub-matrix matching suppose (X
Q
j
,Y
Q
j
), j =
1,2, 3,...,m, and (X
R
i
,Y
R
i
),i = 1,2,3,..., n, denote the
feature points for a given example template and can-
didate image region respectively, the corresponding
distance matrices for the template D
Q
(m×m)
and the im-
age region D
R
(n×n)
as defined in (Saber et al., 2005)
7 EXPERIMENTATION
To validate our algorithm with a consistent database,
we created 3 databases DB
1
DB
2
and DB
3
from an
original database DB
0
containing 500 objects (marine
species). All these objects are nine time rotated with
angle θ =
kπ
9
k = 1,2, ..,9, followed a stretching with
a factor s according to the transform:
1 s
0 1
we
fix s = 1 for the first database, s = 2 and s = 3 for the
second and the third database. Finally, each database
contains 5000 marine species contours (500 original
contours and 4500 contours obtained with the 9 rota-
tions followed by a stretching). In our experimenta-
tion, we have re-sampled the contour in N = 2
9
= 512
points and ε
i
is fixed to 0 for each i ∈ [1,9] and
K = L = 6 (see section 5). Note that for the first
step the contour is closed, and for the partial shape
matching, parts of the shape of all the database ob-
jects were randomly removedto obtain open contours.
Each model of the database is represented by a vector
D
6
of dimension 2
9−6
= 8. For the matching step, the
Haar’s wavelet and the city-block distance were used.
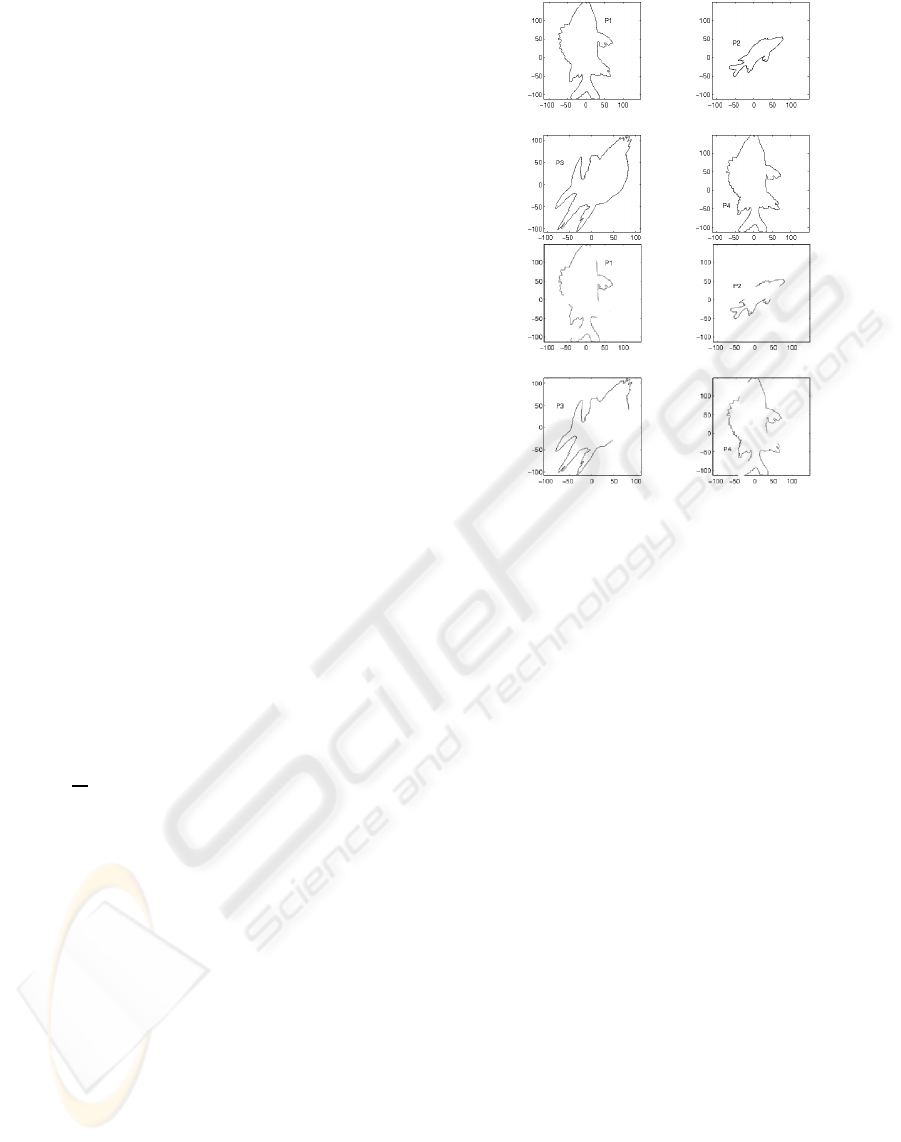
In this paper, and to illustrate the results obtained by
the proposed method, we use four contours of the fig-
ure (2). P1 is the original contour fish. P2 is P1 ro-
tated with π/4 followed by a stretch of s = 0.5. P3 is
Figure 2: (a) P1 Original contour fish. P2 is P1 with rotation
of π/4 followed by a stretch of s = 0.5. P3 is P1 rotated
with π/2 followed by a stretch of s = 1.5 and a scaling of
0.5 and 1.5 on the X and Y axis. On P4 a uniform noise is
added locally on the contour . (b) The same figures as in
the previous figure, with open contour, the cutting contour
is performed randomly.
P1 rotated with π/2 followed by a stretch of s = 1.5
and a scaling of 0.5 and 1.5 on the X and Y axis. On
P4 a uniform noise is added locally on the contour
(The noise is not clearly visible due to scaling of the
figure in printing).
8 CONCLUSIONS
In this paper, we develop a method of 2D shape recog-
nition under affine transform using the discrete dyadic
wavelet transform invariant to translation (Stationary
Wavelet Transform or SWT). We have also showed
how to choose the starting point on the contour us-
ing the orientation of the natural axis. This orientation
enables the elimination of the redundant values on the
affine invariant which is stable for a large distortion.
We the generalized the method to partial shape using
the the sub-matrix matching algorithm developed by
(Saber et al., 2005) to determine correspondances for
evaluation of partial similarity between an example
template and a candidate object region. The method
is tested on a database of 5000 fish species, and the
results are very probate. We are actually plan to gen-
eralize this method to partial shape matching of 3D
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
516
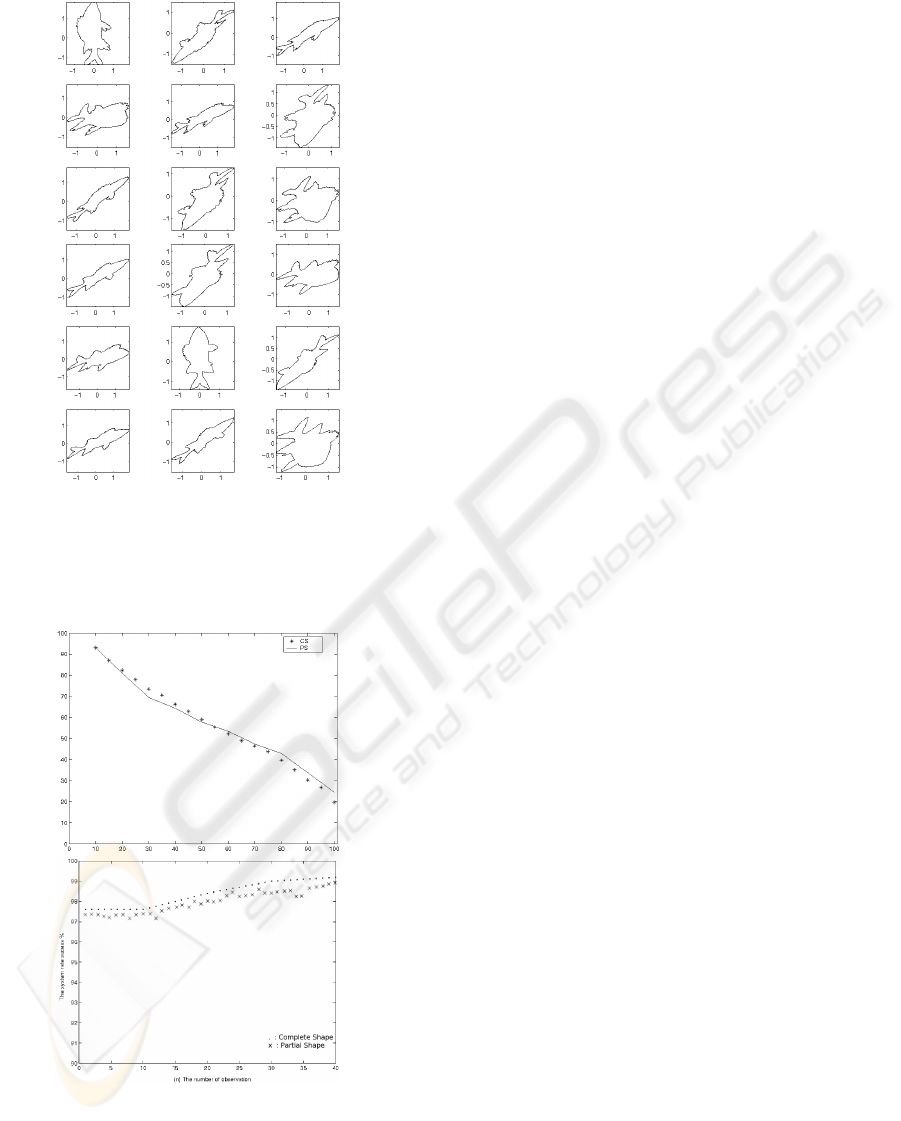
Figure 3: (a)The results obtained for queries P1, P2 and P3,
using any of the 3 database with partial shape. (b) Results
of the query P4 with partial shape.
Figure 4: (a) The Recall/Precision evaluation between the
Complete Shape(CS) and Partial Shape (PS), performed on
500 queries. (b) The global success rate in % according to
the number of observation of the system performed on 500
queries.
objects.
REFERENCES
Bhanu, B. and Ming, J. (1987). Recognition of occluded
objects, a cluster-structure algorithm. Pattern Recog-
nition, 20 (2):199–211.
Khalil, M. and Bayoumi, M. (2001). A dyadic wavelet
affine invariant function for 2d shape recognition.
IEEE Transaction on Pattern Analysis and Machine
Intelligence, 23(10):1152–1163.
Khalil, M. and Bayoumi, M. (2002). Affine invariant for
objet recognition using the wavelet transform. Pattern
Recognition Letters, 23:57–72.
Kimcheng, K. and El-hadi, Z. (2004). 2D Affine-
Based Recognition Using Discrete Wavelet. Interna-
tional Conference on Computer Vision and Graphics,
September 22-24, 2004 Warsaw, Poland.
Mallat, S. (1989). A theory for multiresolution signal de-
composition : the wavelet representation. IEEE Trans-
action on Pattern Analysis and Machine Intelligence,
11:674–693.
Mallat, S. (1991). Zero-crossings of a wavelet transform.
IEEE Transactions on Information Theory, 37:1019–
1033.
Misiti, M., Misiti, Y., Oppenheim, G., and Poggi, J.-M.
(2003). Les ondelettes et leurs applications. hermes
Sciences.
Price, K. (1984). Matching closed contours. International
Conference on Pattern Recognition, Jerusalem.
Saber, E., Yaowu, X., and Tekalp, A. (2005). Partial
shape recognition by sub-matrix matching for partial
matching guided image labeling. Pattern Recognition,
38:1560–1573.
Shen, D., him Wong, W., and Ip, H. H. (1999). Affine-
invariant image retrieval by correspondence matching
of shapes. Image and Vision Computing, 17:489–499.
Tieng, Q. M. and Boles, W. W. (1997a). Recognition of
2d object contours using the wavelet transform zero-
crossing representation. IEEE Transaction on Pattern
Analysis and Machine Intelligence, 19(8):910–916.
Tieng, Q. M. and Boles, W. W. (1997b). Wavelet-based
affine invariant representation: A tool for recognizing
planar objects in 3d space. IEEE Transaction on Pat-
tern Analysis and Machine Intelligence, 19(8):846–
857.
Zhang, D. and Lu, G. (2004). Review of shape representa-
tion and description techniques. Pattern Recognition,
37(1):1–19.
WAVELET TRANSFORM FOR PARTIAL SHAPE RECOGNITION USING SUB-MATRIX MATCHING
517
