
STRUCTURE FROM OMNIDIRECTIONAL STEREO RIG MOTION
FOR CITY MODELING
Michal Havlena, Tom´aˇs Pajdla
CMP, Department of Cybernetics, CTU in Prague, Czech Republic
Kurt Cornelis
PSI-VISICS, ESAT, Katholieke Universiteit Leuven, Belgium
Keywords:
Structure from Motion, City Modeling, Omnidirectional Vision.
Abstract:
This paper deals with a step towards a 3D reconstruction system for city modeling from omnidirectional
video sequences using structure from motion together with stereo constraints. We concentrate on two issues.
First, we show how the tracking and reconstruction paradigm were adapted to use omnidirectional images
taken by lenses with 180 degrees field of view. This concerns mainly camera calibration transforming the
pixel locations into rays and solving the minimal problem for 3D-to-2D matches using RANSAC. Secondly,
we compare the results of the reconstruction using additional stereo constraints to the results when these
constraints are not used and show that they are needed to make the reconstruction stable. Performance of the
system is demonstrated on a sequence of 870 images acquired while driving in a city.
1 INTRODUCTION
3D scene modeling from images is an important prob-
lem of computer vision and photogrammetry. Albeit
large progress made recently in understanding the key
problems of geometry (Hartley and Zisserman, 2003),
optimization (Triggs et al., 1999), and related alge-
bra (Nist´er, 2004a), the design of systems working on
a large number of images is still an interesting and
open engineering problem. For some applications,
working or partially working solutions have already
been introduced. For instance, Boujou (2d3 Boujou,
2001) system is capable of reconstructing the camera
trajectory from a sequence containing several thou-
sands of images when image sequences are acquired
in a limited space and the camera does not make sharp
turns.
In this paper we deal with the problem of the auto-
matic reconstruction and modeling of real cities from
dense image sequences acquired by a pair of cam-
eras mounted on a survey vehicle. This application
calls for the ability to process a very large number of
images which span extended spaces and are acquired
along trajectories containing large camera rotations.
The processing must be done in, or at least close to,
real-time.
Previously, the city reconstruction has been ad-
dressed using aerial images (Gr¨un, 1997; Brenner and
Haala, 1998; Haala et al., 1998; Maas, 2001; Vestri
and Devernay, 2001; Vosselman and Dijkman, 2001)
which allowed reconstructing large areas from a small
number of images. The resulting models, however,
often lacked visual realism when viewed from the
ground level since it was impossible to texture the fa-
cades of the buildings.
Alternatively, survey vehicles equipped with laser
scanners and cameras were used to gather 3D depths
and textures at ground level (Fr¨uh et al., 2005; Fr¨uh
and Zakhor, 2001; Stamos and Allen, 2000; Sun et al.,
2002). These systems gave very nice and accurate 3D
models in some situations but they were complicated
and expensive. A city modeling system (Akbarzadeh
et al., 2006) from dense image sequences acquired si-
multaneously by 8 perspective cameras has been also
designed. The system records images and processes
them later off-line.
Recently, a framework for city modeling from im-
age sequences working in real-time has been devel-
oped in (Cornelis et al., 2006a). It uses structure from
motion (SfM) to reconstruct camera trajectories and
3D key points in the scene, fast dense image match-
ing, assuming that there is a single gravity vector in
407
Havlena M., Pajdla T. and Cornelis K. (2008).
STRUCTURE FROM OMNIDIRECTIONAL STEREO RIG MOTION FOR CITY MODELING.
In Proceedings of the Third International Conference on Computer Vision Theory and Applications, pages 407-414
DOI: 10.5220/0001081104070414
Copyright
c
SciTePress

the scene and all the building facades are ruled sur-
faces parallel to it, and real-time texture mapping to
generate visually correct models from a very large
number of images.
The system gives good results but two major prob-
lems have been reported. First, cars parked along
streets were not correctly reconstructed since they did
not lie in the ruled surfaces representing either the
ground or the buildings on the side. This problem
has been solved by recognizing car locations and re-
placing them by corresponding computer generated
models (Cornelis et al., 2006b). Secondly, 3D recon-
struction could not survive sharp camera turns when
a large part of the scene moved away from the lim-
ited view field of cameras. We propose to solve the
second problem by using “omnidirectional” cameras
with larger field of view.
Omnidirectional cameras have been used on cars
and mobile platforms (Benosman and Kang, 2000)
mainly to estimate ego-motion of the vehicles or for
simultaneous localization and motion planning (Goe-
dem´e et al., 2007; Ehlgen and Pajdla, 2007). These
works used catadioptric cameras with views opti-
mized to see the complete surroundings of their ve-
hicles in a limited resolution. They do not provide
images of photographic quality needed for city mod-
eling. We therefore use 180
◦
fish-eye lenses which are
compact and provide better image quality (Miˇcuˇs´ık
and Pajdla, 2006).
Omnidirectional vision was previously used also
for city modeling to capture images with very large
resolution. Panoramic mosaicing was preferred to
using a fish-eye lens for recovering relative camera
poses very accurately from a small number of im-
ages (Antone and Teller, 2000; Antone and Teller,
2001) and to generate high resolution and high dy-
namic range images (Teller et al., 2003) from geo-
referenced positions. This approach provides very de-
tailed but large images and is not suitable for real-time
processing. We use two compact 4 Mpixel omnidi-
rectional cameras. Images of such size can be pro-
cessed in real-time. On the other hand, our images
are extremely radially distorted and a special projec-
tion model is needed to process them.
In this paper we present an extension of the frame-
work (Cornelis et al., 2006a) for an omnidirectional
stereo rig. We focus on presenting the extensions to
the camera tracking and structure from motion and
demonstrating the functionality of the modified SfM
framework in experiments. We also show that using
two omnidirectional cameras bound into a stereo rig
prevents the undesirable drift in the estimation of the
camera poses. Extensions to facade generation will
be reported elsewhere.
2 THE SFM FRAMEWORK FOR
AN OMNIDIRECTIONAL
STEREO RIG
Figure 1: Omnidirectional stereo rig with Kyocera Finecam
M410R cameras and Nikon FC-E9 fish-eye lens convertors.
Omnidirectional cameras differ from the perspective
ones primarily in their image projection. This differ-
ence influences (i) camera calibration, (ii) feature ex-
traction for image matching, and (iii) structure from
motion computation. We shall next describe the ex-
tension of the SfM framework (Cornelis et al., 2006a)
to be able to use the omnidirectional stereo rig of cam-
eras with 180
◦
field of view lens convertors shown in
Figure 1.
2.1 Omnidirectional Camera
Calibration
We calibrate omnidirectional cameras off-line using
the technique (Bakstein and Pajdla, 2002) and Mi-
ˇcuˇs´ık’s two-parameter model (Miˇcuˇs´ık and Pajdla,
2006), which links the radius of the image point r to
the angle θ of its corresponding rays w.r.t. the optical
axis, see Figure 2, as
θ =
ar
1+ br
2
. (1)
Projecting via this model provides good results even
when a low quality fish-eye lens is used because the
additional parameter b can compensate for improper
lens manufacturing.
All operations in the SfM framework that compute
a projection of a world 3D point into the image or a
ray casted through a pixel are using this lens model.
The mapping from pixel positions to the correspond-
ing rays is pre-computed and stored in a table to save
time in actual computations.
2.2 Features
Images are matched by detecting, describing and
tracking corner-like image features (Cornelis et al.,
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
408

θ
r
(a)
(b)
Figure 2: Diagram (a) shows the equi-angular projection of
Nikon FC-E9 lens convertor. Angle θ measured between
the casted ray and the optical axis determines the radius r
of a circle in the image circular view field where the pixel
representing the value of the projected 3D point will lie.
The Nikon FC-E9 lens convertor can be seen in (b).
2006a). The green image channel is divided into sec-
tions of 8×8 pixels and at most one salient feature per
section is used to limit the amount of computation.
The feature saliency F is computed from a square
region of pixels as
F = |(M
UL
+ M
WR
) − (M
UR
+ M
WL
)|, (2)
where M
UL
, M
UR
, M
WL
, and M
WR
are average pixel
values inside the upper-left, upper-right, lower-left,
and lower-right quadrants.
These features were designed to detect corners of
buildings and their windows and they work reliably
for corners where horizontal and vertical lines meet.
The detection becomes worse for rotated corners.
Furthermore, objects captured in omnidirectional im-
ages are radially distorted as they come closer to the
border of the circular view field. The feature saliency
can therefore differ dramatically if computed on an
object located in the center of the view field or on the
same object when it appears close to the border. This
can be remedied by a local image rectification (Mau-
thner et al., 2006) but we observed that the difference
is negligible when matching consecutive images of
our dense image sequences. Figure 3 shows an input
image and the detected feature points.
2.3 Initialization by 2D Tracking
The camera tracking and structure from motion com-
putation has to be initialized by computing initial 3D
structure. Internal parameters of the camera calibra-
tions (held constant for the whole sequence) and a few
initial camera poses are needed. Feature points are de-
tected and tracked in 2D over several consecutive im-
ages and then triangulated into world 3D points using
known camera poses.
Tracking in 2D is done by constructing tentative
matches from pairs of feature points in consecutive
Figure 3: Left: Input image. Right: Detected feature points
marked with coloured squares around them. Black area
around the circular view field is excluded from feature de-
tection.
C
L
i+ j+1
C
L
i+ j+1
C
R
i+ j+1
C
L
i+ j
C
R
i+ j
C
R
i
C
R
i
y
L
i+ j+1
y
L
i+ j+1
x
R
i+ j+1
y
L
i+ j
x
R
i+ j
x
R
i
x
R
i
X
R
i,i+ j
X
R
i,i+ j
X
R
i,i+ j+1
Figure 4: Left: 3D point X
R
i,i+ j
triangulated from x
R
i
and
x
R
i+ j
or x
R
i
and y
L
i+ j
and projected into new images acquired
by cameras C
L
i+ j+1
and C
R
i+ j+1
. Positions of the most simi-
lar feature points are denoted by y
L
i+ j+1
and x
R
i+ j+1
. Right:
The refinement of the 3D point X
R
i,i+ j
into X
R
i,i+ j+1
using
triangulation from x
R
i
and y
L
i+ j+1
.
images, which have small differences in positions as
well as in their saliencies. Images used for initial-
ization thus should come from a slow camera motion
without sharp turns. Next, pixel regions of the tenta-
tive feature point pairs are correlated and only the suf-
ficiently and mutually most similar tentative matches
are joined to construct tracks. Only those tracks that
are tracked during all frames of the initialization are
used to triangulate cameras and compute the initial
3D structure. It is important to adjust the length of the
initial sequence to retain a sufficient number of tracks
corresponding to a sufficiently large camera motion.
The initialization is done independently for the left
and right camera, so two sets of world 3D points are
computed.
2.4 Expansion of the Euclidean
Reconstruction
Once the Euclidean reconstruction is initialized, the
next image pair in the stereo sequence is taken and the
reconstruction is expanded using it. The expansion
consists of several steps described below in detail.
First, the camera poses of the new stereo pair
STRUCTURE FROM OMNIDIRECTIONAL STEREO RIG MOTION FOR CITY MODELING
409

must be established. 3D points reconstructed in pre-
vious frames are projected into the new images us-
ing the last established camera poses. The feature
points that could prolong the tracks connected with
the projected 3D points are found in small neighbour-
hoods of the projections using the same tests as dur-
ing the initialization. As can be seen in Figure 4,
every reconstructed 3D point, e.g. X
R
i,i+ j
triangulated
from feature point positions x
R
i
and x
R
i+ j
or x
R
i
and
y
L
i+ j
(depending on whether or not it has been re-
triangulated already), is projected into the right and
the left images as π
R
(X
R
i,i+ j
) and π
L
(X
R
i,i+ j
). To pro-
long tracks, we establish tentative 3D-to-2D matches
(X
R
i,i+ j
,x
R
i+ j+1
,y
L
i+ j+1
) between the 3D point X
R
i,i+ j
,
the feature point x
R
i+ j+1
found in the neighbourhood
of π
R
(X
R
i,i+ j
) as the feature point whose saliency is
most similar to the saliency of x
R
i+ j
, and the feature
point y
L
i+ j+1
found in the neighbourhood of π
L
(X
R
i,i+ j
)
as the feature point whose saliency is most similar
to the saliency of x
R
i+ j+1
. The tentative 3D-to-2D
matches are used as the input to RANSAC (Fischler
and Bolles, 1981) robust estimation technique which
estimates the camera poses and simultaneously rejects
wrong tentative matches.
Left camera pose can be computed from a minimal
sample of three 3D-to-2D correspondences by Nis-
ter’s algorithm (Nist´er, 2004b) and right camera pose
is then obtained using the rigid left-right transforma-
tion computed from the known camera poses during
the initialization. The main advantage of Nister’s al-
gorithm, originally designed for non-central cameras,
lies in the fact that the rays do not need to be concur-
rent and thus rays going through both the left and the
right cameras can be combined together in one sam-
ple. The algorithm (Nist´er, 2004a) leads to solving
an 8-degree polynomial using Sturm sequences and
bisection with a fixed number of iterations and gives
accurate results in constant time.
The RANSAC stopping condition ensures stop-
ping dependent on the probability of finding a better
sample. As we are using samples of size 3, RANSAC
usually needs only tens of samples to meet the stop-
ping condition. However, not to exceed the maximal
processing time available, a threshold for the maxi-
mal number of samples has to be used. To save even
more time, the test for inliers is performed gradually
on partitions of the matches and the verification is ter-
minated as soon as it is clear that the new hypothe-
sis cannot be better than the best hypothesis known at
the time. A similar idea is extended into a two-step
evaluation procedure in (Chum and Matas, 2002) and
further modified specially for on-line motion estima-
tion in (Nist´er, 2003). A match (X
R
i,i+ j
,x
R
i+ j+1
,y
L
i+ j+1
)
is an inlier if and only if both matches (X
R
i,i+ j
,x
R
i+ j+1
)
and (X
R
i,i+ j
,y
L
i+ j+1
) are inliers.
Two runs of the Levenberg-Marquardt non-linear
optimization are used to refine the camera poses us-
ing the computed set of inliers. The first refinement
uses reprojection error as the cost function and finds
the best solution according to the computed set. As
this set can be computed incorrectly and can contain
true outliers which might have a big influence on the
optimization, a fixed cost value is used when the re-
projection error is bigger than a threshold during the
second refinement to suppress this influence. Again,
reprojection errors in both the left and the right im-
ages are measured.
The tracks of the resulting inliers are prolonged
and 3D points connected with these tracks are refined
by re-triangulation. The stereo rig rigidity constraint
is enforced again when feature points x
R
i
and y
L
i+ j+1
are used to triangulate the 3D point X
R
i,i+ j+1
. The
rest of the tracks, i.e. the tracks of the outliers and
the tracks that did not have a corresponding match,
are ended. If the same feature point is detected later
again, a new track with a new connected 3D point is
created with no binding to the old one.
There are also tracks that do not have a 3D point
connected with them because either they are too short
or the angle between the two rays used for triangula-
tion is not yet large enough. These tracks are pro-
longed using the following geometrical constraints
derived from the established camera poses to restrict
the set of possible locations of the feature points.
First, a homography through a virtual plane in a fixed
distance in front of the camera is used to get an esti-
mate of the position of the feature point and a circular
neighbourhood around this location is searched. This
distance should be set to the expected average dis-
tance of the feature points. An additional condition
is the proximity to the matching epipolar line. When
having omnidirectional cameras, the residual distance
is computed as the distance between the feature point
position and the perpendicular projection of the ray
going through the position of the feature point into
the matching epipolar plane, projected to the image.
2.5 Bundle Adjustment
The data computed from the image sequences dur-
ing the expansion are divided into blocks, each of
them holding information from 60 images. Unlike
the on-line local bundle adjustment routine described
in (Mouragnon et al., 2006), our routine processes the
already finished data blocks with no back coupling to
the expansion. First, the positions of 3D points are
refined with fixed camera poses and then the camera
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
410

poses are refined with fixed positions of 3D points.
Left and right cameras are rigidly bound using the
left-right transformation and 3D point reprojection er-
rors in both the left and the right images are summed
together in the cost function. The whole routine runs
twice and a fixed cost value is used when the reprojec-
tion error is bigger than a threshold during the second
run to suppress the influence of outliers.
The main reason of running the bundle adjustment
routine is to smooth the camera trajectories and to re-
move noise from 3D point clouds as only the tracks
of feature points visible in 4 frames or more are used
for refinement and 3D points reconstructed from short
tracks are thrown away because these tracks are con-
sidered to be less reliable.
3 EXPERIMENTS
Next we shall demonstrate the structure from mo-
tion with an omnidirectional camera stereo rig. We
shall first describe the stereo rig and then compare the
results of motion computation with and without the
modifications that enforce the stereo rig rigidity con-
straint described in Section 2.
3.1 Omnidirectional Stereo Rig
The important parameters of a camera rig are: view
angle, resolution, image quality, frame rate, exposure
synchronization, size and weight, and the length of
the base line. We have constructed a two-camera rig.
Each camera of the rig is a combination of Nikon FC-
E9 mounted via a mechanical adaptor onto a Kyocera
Finecam M410R digital camera, see Figure 1.
Nikon FC-E9 is a megapixel omnidirectional add-
on convertor with 180
◦
view angle. It is designed to
be mounted on top of lenses of standard Nikon digital
cameras. The lens is larger and heavier than similar
FC-E8 Nikon lens but it is designed for imagers with
higher resolution than FC-E8 and provides images
of photographic quality. Kyocera Finecam M410R
delivers 2272×1704 images at 3 frames per second.
Since the FC-E9 lens is originally designed for a dif-
ferent optical system, we used a custom made me-
chanical adaptor to fit it on top of the Kyocera lens.
The resulting combination yielded a circular view of
diameter 1600 pixels in the image.
Since the FC-E9 lens is close to equiangular pro-
jection (Bakstein and Pajdla, 2002), we obtain angu-
lar resolution 0.11 = 180/1600 degrees per pixel in
the radial direction of the image. The tangential res-
olution depends on the distance from the view center.
It grows from 0.11 degrees per pixel in the center to
Figure 5: Kyocera Finecam M410R cameras with Nikon
FC-E9 fish-eye lens convertors and two conventional per-
spective cameras mounted on a survey vehicle. Perspective
cameras were not used in our experiments.
0.036 degrees per pixel at the periphery. For compar-
ison, consider that a 1024×768 camera with a com-
mon angle of view 40
◦
yields almost uniform reso-
lution 0.039 = 40/1024 degrees per pixel. Kyocera
cameras do not have external synchronization but we
were able to connect an external signal to start the ac-
quisition at the same moment. Figure 5 shows four
cameras mounted on a survey vehicle. The two cam-
eras with large fish-eye lenses form our stereo rig with
0.95 m base line.
3.2 SfM with the Stereo Rig Rigidity
Constraint
There are several ways to get the camera poses needed
for the initialization. If the cameras are mounted on
a vehicle riding at a constant known velocity with no
changes in the direction of the movement during one
second, starting camera poses for the left camera can
be computed easily. If the relative camera pose of the
right camera w.r.t. the left camera is known, starting
camera poses for the right camera can be obtained by
a simple transformation.
Another approach does not rely on a known stereo
rig calibration but computes the starting camera poses
directly. An extension of a WBS structure from mo-
tion (Matas et al., 2004) to omnidirectional images
can be used to get epipolar geometries between the
first left and first right, first left and e.g. sixth left, and
first right and sixth left cameras. These geometries
can be then combined together to get movement esti-
mation fulfilling the stereo rig rigidity constraint.
Both approaches were tested and work well. The
main advantage of the first approach lies in the fact
that one needs no additional method to start the recon-
struction. On the other hand, the second approach can
be used even when the stereo rig calibration and/or
the movement of the car are not known.
Figure 6 shows a city segment with several blocks
of houses used for our experiments. We were driv-
ing our survey vehicle equipped with the camera rig
STRUCTURE FROM OMNIDIRECTIONAL STEREO RIG MOTION FOR CITY MODELING
411
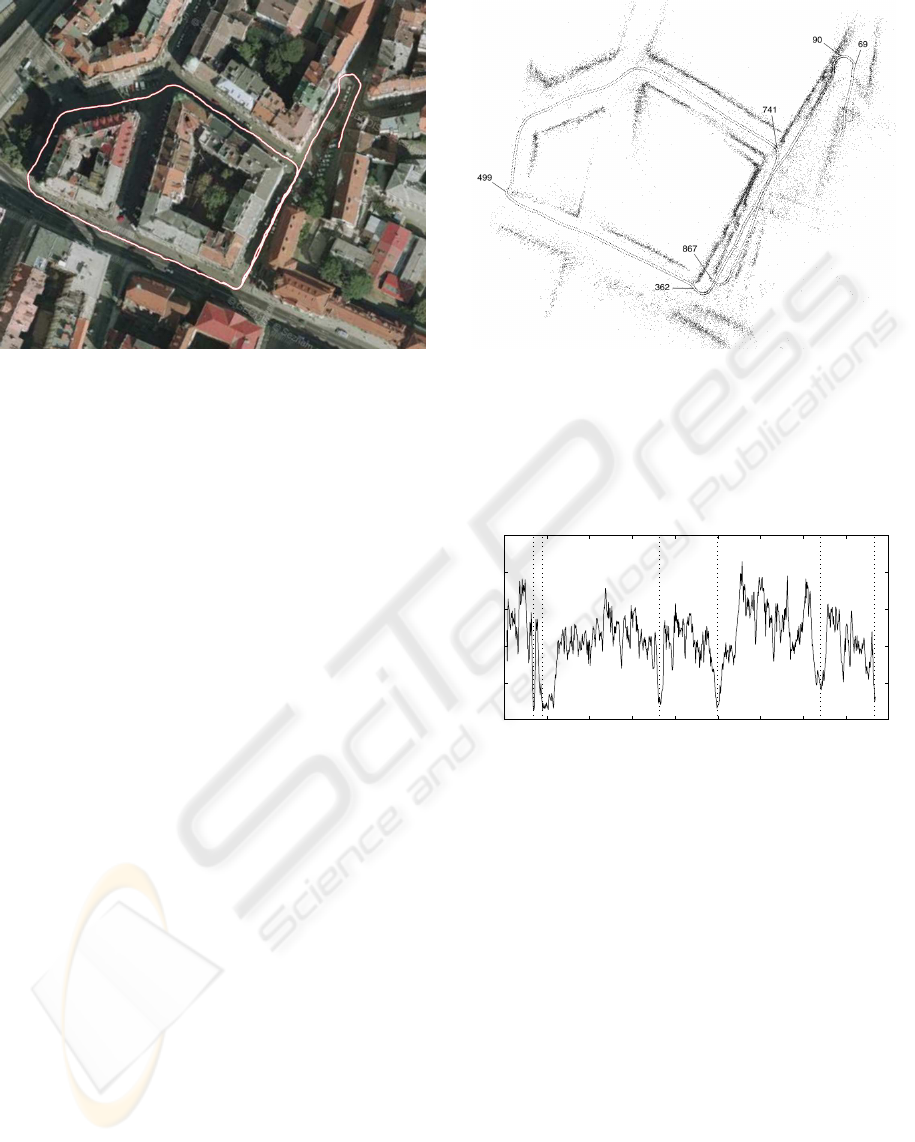
Figure 6: An aerial view of the city segment used for the
acquisition of our test sequence, the designed car trajectory
is drawn with a white line. The trajectory contains several
sharp turns and a round-trip around a block of houses.
slowly following the path drawn in the map. The de-
signed trajectory contains sharp turns to test the per-
formance under difficult conditions and a closed loop
which allows us to measure the accuracy of the re-
construction. The data were acquired under normal
traffic conditions with cars and pedestrians moving in
the streets.
Our test sequence was 870 frames long and the
first and the sixth image were used to initialize the
SfM with more than 200 correct tracks for each cam-
era reconstructed into world 3D points. The top view
of the resulting reconstructed 3D model can be seen in
Figure 7. Straight street segments are quite easy, the
support of the RANSAC winner is usually more than
60% and only few tens of runs of the RANSAC loop
are needed to find it. Segments with sharp turns are
much more difficult, the support of the RANSAC win-
ner and also the number of active tracks drop dramati-
cally, see Figure 8. We hypothesize that this is caused
mostly by inaccurate camera and/or stereo rig cali-
bration because the world 3D points come closer to
cameras and start rotating, which causes the errors in
the estimations of their depths to become much more
important than when these 3D points are distant and
the movement is rotation-free.
The shape of the reconstructed trajectory corre-
sponds well to the actual one, we observe only small
problems at the beginnings of the turns when the
movement is still estimated as being forward although
the car is just starting to turn. This is probably caused
by finding a large number of feature points on the cor-
ner building and a lack of feature points in the other
parts of the scene. These “corner building” feature
points form a large set of inliers to a model which
Figure 7: The resulting 3D model from the top view. Cam-
era positions are represented by bigger dots, smaller dots
represent the reconstructed world 3D points. The loop is
not closed, mostly because of the errors arising in the sharp
turns where the number of active tracks drops dramatically.
Note that the reconstruction nearly failed in the sharp turn
at frame number 499.
0 100 200 300 400 500 600 700 800 900
0
50
100
150
200
250
frame number
number of active tracks
Figure 8: Variation of the number of active tracks for differ-
ent frames in the sequence. Note that the number of active
tracks drops dramatically in frames corresponding to sharp
turns.
does not describe the whole scene well.
The error accumulated along the 420 meters long
loop is less than 4.5 meters.
3.3 SfM Without the Stereo Rig
Rigidity Constraint
During the adaptation of the original SfM into an om-
nidirectional one, we first adapted the geometry and
RANSAC without enforcing the stereo rig rigidity
constraint (Havlena et al., 2007) in the reconstruction.
Stereo information was used only in the RANSAC
loop where the left camera pose was estimated from
3D-to-2D matches from both cameras and the right
camera pose was computed using the stereo rig cali-
bration.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
412

Figure 9: The resulting 3D model from the top (left) and the
side views (right). As the stereo rig rigidity constraint is not
enforced, scale of the reconstruction is being lost gradually
so the cameras are approaching the ground plane although
they were actually moving parallel to it. The reconstruction
fails in the first sharp turn.
The SfM worked fine when using additional
GPS/INS data but failed when these data were not
used. The resulting model reconstructed for the same
test sequence without enforcing the rigidity constraint
can be seen in Figure 9. The number of active tracks
drops under 10 in the first sharp turn because the po-
sitions of world 3D points were not estimated well as
the scale of the reconstruction was gradually lost.
A comparison with the original framework using
perspective cameras was not performed but we hy-
pothesize that the result would be even worse not only
because of the missing stereo rig rigidity constraint
but also because of the lack of feature points caused
by a very small field of view.
3.4 Performance
The original SfM framework is able to work in real-
time and it would be exciting to achieve the same
speed even with fish-eye cameras. Until now, we were
interested more in functionality than in performance
and the actual speed of our C++ implementation on a
standard 2GHz Intel Pentium 4 computer is about 1.3
frames per second. This is primarily caused by the
size of the input images which is 800×800 compared
to 360×288 used with perspective cameras. Work-
ing with smaller images makes it more difficult to de-
tect and to correctly describe enough feature points
and making the images much smaller will be possi-
ble only if an extension to feature extraction would be
proposed and implemented. This extension would de-
scribe the features on a locally unwarped image. As
this unwarping would not be quick enough using the
CPU, GPU programming techniques should be used
via OpenGL.
On the other hand, it showed out that 3 frames per
second provided by our omnidirectional cameras are
enough for the reconstruction from a moving vehicle
because feature points do not get lost from the im-
age as quickly as when perspective cameras are used.
That is why it is not necessary to achieve 25 frames
per second computational performance, 3 frames per
second are enough for real-time processing.
4 CONCLUSIONS
We succeeded in adapting the structure from motion
part of a city modeling framework to using an omnidi-
rectional stereo rig. The major changes of the frame-
work originally working with one perspective camera
involve significant changes in geometry, as rays repre-
sented by unit vectors have to be used instead of im-
age pixels, and enforcing the stereo constraints. We
have also shown how using two cameras bound into a
stereo rig improves the stability of the reconstruction
and helps to keep its overall scale.
Making the reconstruction more accurate is our
main goal for the near future. We believe that better
calibration of the cameras and of the stereo rig done
directly from the images together with merging the
tracks of the same feature points accidentally lost in
one or more of the frames due to occlusions or fast
camera movements should increase the number of in-
liers in difficult sharp turns and would therefore help
us to get rid of the biggest sources of inaccuracies.
The rest of the future work lies in adapting the
other parts of the city modeling framework to using
omnidirectional cameras – starting with the facade
reconstruction, through topological map generation,
and texture generation, which could benefit from us-
ing omnidirectional vision.
ACKNOWLEDGEMENTS
This work is supported by the European IST Pro-
gramme Project FP6-0027787 DIRAC. The author
was also supported by the Czech Science Founda-
tion under project 201/07/1136 and by the Grant
Agency of the Czech Technical University under
project CTU0705913.
This paper only reflects the authors’ views and
funding agencies are not liable for any use that may
be made of the information contained herein.
STRUCTURE FROM OMNIDIRECTIONAL STEREO RIG MOTION FOR CITY MODELING
413

We would like to acknowledgePavel Krsek for the
construction of the external trigger and Hynek Bak-
stein for mounting the cameras to the survey vehicle.
REFERENCES
2d3 Boujou (2001). http://www.boujou.com.
Akbarzadeh, A., Frahm, J.-M., Mordohai, P., Clipp, B., En-
gels, C., Gallup, D., Merrell, P., Phelps, M., Sinha, S.,
Talton, B., Wang, L., Yang, Q., Stew´eius, H., Yang,
R., Welch, G., Towles, H., Nist´er, D., and Pollefeys,
M. (2006). Towards urban 3d reconstruction from
video. In 3DPVT. Invited paper.
Antone, M. and Teller, S. (2000). Automatic recovery of
relative camera rotations for urban scenes. In CVPR
2000, pages II:282–289.
Antone, M. and Teller, S. (2001). Scalable, absolute posi-
tion recovery for omni-directional image networks. In
CVPR 2001, pages I:398–405.
Bakstein, H. and Pajdla, T. (2002). Panoramic mosaicing
with a 180
◦
field of view lens. In Proc. IEEE Work-
shop on Omnidirectional Vision, pages 60–67.
Benosman, R. and Kang, S. (2000). Panoramic Vision.
Springer-Verlag.
Brenner, C. and Haala, N. (1998). Fast production of virtual
reality city models. IAPRS, 32(4):77–84.
Chum, O. and Matas, J. (2002). Randomized ransac with
t
d,d
test. In BMVC 2002, pages 448–457.
Cornelis, N., Cornelis, K., and Van Gool, L. (2006a).
Fast compact city modeling for navigation pre-
visualization. In CVPR 2006, pages II:1339–1344.
Cornelis, N., Leibe, B., Cornelis, K., and Van Gool, L.
(2006b). 3d city modeling using cognitive loops. In
3DPVT 2006, pages 9–16.
Ehlgen, T. and Pajdla, T. (2007). Maneuvering aid for large
vehicle using omnidirectional cameras. In WACV
2007, page 17.
Fischler, M. and Bolles, R. (1981). Random sample consen-
sus: A paradigm for model fitting with applications to
image analysis and automated cartography. Comm.
ACM, 24(6):381–395.
Fr¨uh, C., Jain, S., and Zakhor, A. (2005). Data processing
algorithms for generating textured 3d building facade
meshes from laser scans and camera images. IJCV,
61(2):159–184.
Fr¨uh, C. and Zakhor, A. (2001). 3d model generation for
cities using aerial photographs and ground level laser
scans. In CVPR 2001, pages II:31–38.
Goedem´e, T., Nuttin, M., Tuytelaars, T., and Van Gool, L.
(2007). Omnidirectional vision based topological nav-
igation. IJCV, 74(3):219–236.
Gr¨un, A. (1997). Automation in building reconstruction. In
Fritsch, D. and Hobbie, D., editors, Photogrammetric
Week’97, pages 175–186, Stuttgart.
Haala, N., Brenner, C., and St¨atter, C. (1998). An inte-
grated system for urban model generation. In ISPRS
Congress Comm. II, pages 96–103.
Hartley, R. and Zisserman, A. (2003). Multiple View Geom-
etry in Computer Vision. Cambridge University Press,
second edition.
Havlena, M., Cornelis, K., and Pajdla, T. (2007). Towards
city modeling from omnidirectional video. In Grab-
ner, M. and Grabner, H., editors, CVWW 2007, pages
123–130, St. Lambrecht.
Maas, H. (2001). The suitability for airborne laser scanner
data for automatic 3d object reconstruction. In As-
cona01, pages 291–296.
Matas, J., Chum, O., Urban, M., and Pajdla, T. (2004). Ro-
bust wide baseline stereo from maximally stable ex-
tremal regions. IVC, 22(10):761–767.
Mauthner, T., Fraundorfer, F., and Bischof, H. (2006). Re-
gion matching for omnidirectional images using vir-
tual camera planes. In Chum, O. and Franc, V., edi-
tors, CVWW 2006, pages 93–98, Telˇc.
Miˇcuˇs´ık, B. and Pajdla, T. (2006). Structure from motion
with wide circular field of view cameras. IEEE Trans.
PAMI, 28(7):1135–1149.
Mouragnon, E., Dekeyser, F., Sayd, P., Lhuillier, M., and
Dhome, M. (2006). Real time localization and 3d re-
construction. In CVPR 2006, pages I:363–370.
Nist´er, D. (2003). Preemptive ransac for live structure and
motion estimation. In ICCV 2003, pages 199–206.
Nist´er, D. (2004a). An efficient solution to the five-point
relative pose problem. IEEE Trans. PAMI, 26(6):756–
770.
Nist´er, D. (2004b). A minimal solution to the generalized
3-point pose problem. In CVPR 2004, pages I:560–
567.
Stamos, I. and Allen, P. (2000). 3-d model construction
using range and image data. In CVPR 2000, pages
I:531–536.
Sun, Y., Paik, J., Koschan, A., and Abidi, M. (2002). 3d
reconstruction of indoor and outdoor scenes using a
mobile range scanner. In ICPR 2002, pages III:653–
656.
Teller, S., Antone, M., Bodnar, Z., Bosse, M., Coorg, S.,
Jethwa, M., and Master, N. (2003). Calibrated, reg-
istered images of an extended urban area. IJCV,
53(1):93–107.
Triggs, B., McLauchlan, P., Hartley, R., and Fitzgibbon, A.
(1999). Bundle adjustment: A modern synthesis. In
Vision Algorithms: Theory and Practice, pages 298–
372, Corfu.
Vestri, C. and Devernay, F. (2001). Using robust methods
for automatic extraction of buildings. In CVPR 2001,
pages I:133–138.
Vosselman, G. and Dijkman, S. (2001). Reconstruction of
3d building models from laser altimetry data. IAPRS,
34(3):22–24.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
414
