
3D HUMAN FACE MODELLING FROM UNCALIBRATED IMAGES
USING SPLINE BASED DEFORMATION
Nikos Barbalios, Nikos Nikolaidis and Ioannis Pitas
Department of Informatics, Aristotle University of Thessaloniki,GR-54124, Thessaloniki, Greece, (+30) 2310 996361
Keywords:
Uncalibrated 3D face reconstruction, face modelling, 3D reconstruction, mesh deformation, model based 3D
reconstruction.
Abstract:
Accurate and plausible 3D face reconstruction remains a difficult problem up to this day, despite the tremen-
dous advances in computer technology and the continuous growth of the applications utilizing 3D face models
(e.g. biometrics, movies, gaming). In this paper, a two-step technique for efficient 3D face reconstruction
from a set of face images acquired using an uncalibrated camera is presented. Initially, a robust structure from
motion (SfM) algorithm is applied over a set of manually selected salient image features to retrieve an esti-
mate of their 3D coordinates. These estimates are further utilized to deform a generic 3D face model, using
smoothing splines, and adapt it to the characteristics of a human face.
1 INTRODUCTION
Reconstructing an object’s geometry from a set of im-
ages has been one of the most popular and challenging
tasks in computer vision with applications such as vir-
tual view synthesis, gaming, security, virtual reality,
3DTV etc. 3D face reconstruction is a special case
of this problem. A popular solution to this problem
are the so-called Structure from Motion (SfM) algo-
rithms, that receive a number of points as input and
return the 3D coordinates of those points
Applications that utilize face models, (i.e. ad-
vertising, gaming, movie industry) prescribe that the
generated 3D face model should not only be accu-
rate but plausible and realistic as well. Faces, how-
ever, are essentially non-rigid surfaces and only a few
features can be reliably extracted and matched across
facial images, thus point-based approaches proposed
in the literature, (Mendonca and Cipolla(1999); Hart-
ley(1994); Pollefeys and Gool(1997)), result to non-
plausible face models restricted only to a small num-
ber of points. To compensate for the sparseness of the
reconstructed 3D points, almost all algorithms use a
prototype face model. Two types of prototype mod-
els are used: generic mesh models and 3D morphable
models.
Generic mesh models comprise of a set of nodes
corresponding to characteristic facial points of an av-
erage person. The generic model can be incorpo-
rated in the algorithm either before, during or after
the 3D reconstruction procedure. In (J. Strom(1999))
the generic mesh model was used to initialize the 3D
reconstruction procedure whereas in (Y. Shan(2001);
Fua(2000)), it was used to constrain the so-called
bundle adjustment optimization. Although these two
methods yield good results, the algorithm converges
close to the initial estimation resulting to a large
bias towards the generic model. This problem was
alleviated in (A.R. Chowdhury(2002); R. Hassan-
pour(2004)), by proposing the incorporation and de-
formation of the generic model after the optical-flow
based estimation of the 3D structure coordinates.
3D morphable models, initially introduced in
(Blanz and Vetter(1999)), are derived by transform-
ing the shape and texture information of a database
containing high resolution head laser scans into a vec-
tor space representation. By doing so, the 3D head is
parameterized in a statistical way by a shape vector,
containing the 3D coordinates of the model’s nodes,
and a texture vector, containing the corresponding
texture value for each node. New faces can be ob-
tained by forming linear combinations of these shape
and texture vectors. Despite its realistic results, the
main drawbacks of this approach are the lack of ac-
curacy, its instability to illumination changes and the
huge computational cost for the convergence of the
algorithm, issues that where partially addressed in
(M. Dimitrijevic(2004); M. Zhao(2006)).
455
Barbalios N., Nikolaidis N. and Pitas I. (2008).
3D HUMAN FACE MODELLING FROM UNCALIBRATED IMAGES USING SPLINE BASED DEFORMATION.
In Proceedings of the Third International Conference on Computer Vision Theory and Applications, pages 455-459
DOI: 10.5220/0001081204550459
Copyright
c
SciTePress

The proposed method is a combination of a ro-
bust SfM algorithm, introduced in (M. Pollefeys and
Gool(1998)), with a 3D generic mesh face model.
Salient features of the face are manually marked on
the set of images and the SfM algorithm is used
to produce a cloud of 3D points. This point cloud
is subsequently utilized for the deformation of the
generic face model. The proposed method is re-
lated to (R. Hassanpour(2004)) and (A.R. Chowd-
hury(2002)) since it also deforms the generic model
after the SfM algorithm. However, in the proposed
method the deformation of the generic mesh model is
implemented using a different approach, namely thin
plate smoothing spline functions which, as shown in
the experimental results, accurately estimates the de-
formation of each node of the model. Moreover, our
algorithm yields satisfactory results using fewer input
images.
2 3D RECONSTRUCTION
Our method is based on the iterative SfM algorithm
proposed in (M. Pollefeys and Gool(1998)). This al-
gorithm is a combination of a projective SfM algo-
rithm with an auto-calibration algorithm to restrict
the ambiguity of the reconstruction from projective
to metric. The basic steps of the algorithm will be
shortly described below for the sake of completeness
of this paper.
The method is based on the ideal pinhole cam-
era model. In such a camera, the projection m =
[x,y,0]
T
, on the image plane, of an object point
M = [X,Y,Z, 0]
T
is described, in homogeneous coor-
dinates, by
m ∼ P· M (1)
where P is the 3× 4 projection matrix of the camera,
encoding the camera’s intrinsic and extrinsic parame-
ters. The symbol ∼ denotes that equality is valid up
to an arbitrary scale factor, since we use homogeneous
coordinates.
Initially, a set of N characteristic points (features)
are extracted from the image set and their corre-
spondences across the images are identified. Using
those feature points, the 3×3 fundamental matrix F
ij
,
which is an algebraic representation of the epipolar
geometry between two views i and j, can be evaluated
using the following homogeneous system of equa-
tions:
q
T
i
· F
ij
· q
T
j
= 0 (2)
where q
i
= [m
i,1
,m
i,2
,m
i,3
...,,m
i,N
]
T
and m
i,k
de-
notes the k-th feature in image i. Note that since
F
ij
has 7 degrees of freedom (M. Pollefeys and
Gool(1998)), at least 7 features should be present in
all the images of the set, i.e. N ≥ 7.
After evaluating, using (2), the fundamental ma-
trix F
12
between the views 1 and 2, the projection
matrices P
1
and P
2
for those two views can be esti-
mated. If we consider that the first view is aligned
with the world coordinate system, its projection ma-
trix is P
1
= [I
3×3
|0
3
] where I,0 denote the identity
matrix and the all-zero vector respectively. Sub-
sequently, using the epipolar constraint the projec-
tion matrix P
2
of the second view is constrained to
P
2
= [[e
2
] × F
12
+ e
2
τ
T
|σe
2
] ,where τ
T
is a 3× 1 vec-
tor determining the reference frame of the reconstruc-
tion, σ is the scale factor of the reconstruction and e
2
the position of the epipole in the second image. Af-
ter the evaluation of the two projection matrices, an
estimate M
k
of the position of the k-th feature point
(k = 1,...,N) in the projective space can be obtained
using (1).
In the next step, this projectivereconstruction M
k
,
is further used to iteratively retrieve, through (1), the
projection matrices for all the additional views of the
image set. Up to this step, the evaluation of all the
projection matrices is based on the projective recon-
struction M
k
retrieved only from the first two views.
The next step, which is called bundle adjustment,
comprises the overall optimization of the reconstruc-
tion which refines both the reconstructed structure and
the projection matrices for all the views. The opti-
mization criterion is the overall minimization for all
the views of the re-projection error, i.e. the distance
between the 2D feature points and the estimates pro-
duced by back-projecting the produced 3D model on
the images :
(P
i
,M
k
) = arg min
P
i
,M
k
∑
i
∑
k
(m
i,k
− P
i
· M
k
)
2
(3)
where P
i
is the projection matrix for view i, M
k
is
the 3D coordinate vector of the k-th feature and m
i,k
denotes the 2D coordinates vector of the k-th feature
in image i.
The final step of the algorithm is the self-
calibration procedure which retrieves, for each view
i, the camera intrinsic parameters matrix K
i
and up-
grades the structure to the metric space (M. Pollefeys
and Gool(1998)). Once the intrinsic parameters are
retrieved, the reconstructed 3D points are transformed
from the projective space into the metric space, lead-
ing to a 3D point cloud.
In our implementation, we used 15 characteristic
points of the human face namely the corners of the
mouth, the midpoints of the lips, the tip and base of
the nose, the corners of the eyes, the point between
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
456
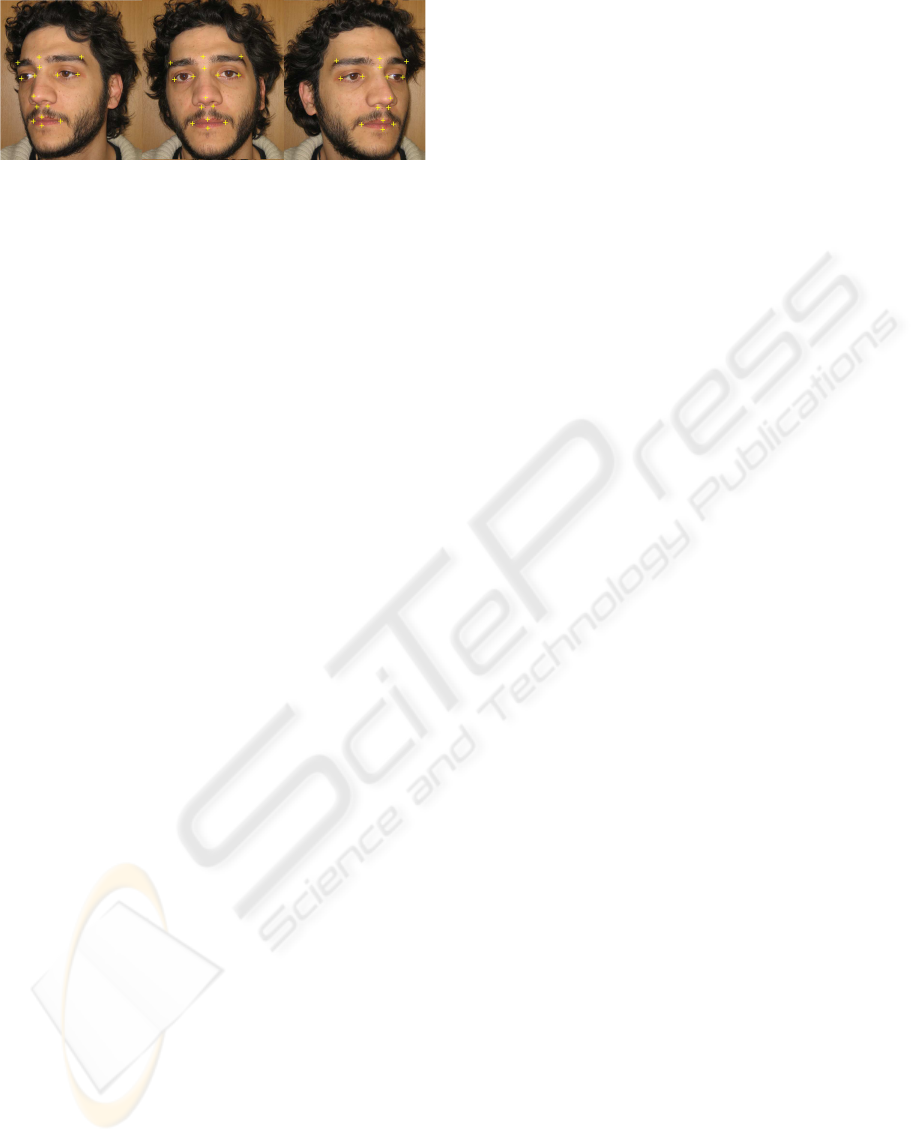
Figure 1: The selected characteristic points depicted on a
sequence of facial images.
the eyebrows and two characteristic points of the eye-
brows. These points, shown in Figure 1, are selected
not only because they are easily identifiable, but also
because they have a representation in the nodes of the
generic model used. It is also worth mentioning that
these points and their correspondences are manually
defined and thus, the absence of large position errors
and false correspondences between them is assumed.
3 GENERIC MODEL
DEFORMATION
The second part of our algorithm deals with the incor-
poration of a generic face model into the reconstruc-
tion procedure. Our algorithm uses a generic face
model derived from the Candide face model, devel-
oped by the Linkoping University (Ahlberg(2001)).
Since Candide is a rather limited resolution model,
comprised of 103 3D nodes and 184 triangles, it has
been enhanced in three steps: Initially, extra nodes
have been added in areas where the original model
has very few nodes (i.e. nose and eyes areas), to in-
crease the deformation flexibility of those areas. Then
the PN triangles mesh subdivision algorithm (A. Vla-
chos(2001)) has been applied leading to an enhanced
generic model composed by 1729 nodes and 3392 tri-
angles. Finally, the enhanced model was smoothed to
eliminate the sharp-edges and its faceted appearance
leading to the final generic model used in our algo-
rithm. It should be noted that the nodes of the origi-
nal model are included in the nodes of the enhanced
model.
During the first step of the deformation, the
generic model undergoes global rotation, translation
and scaling, so that it is roughly aligned with the
cloud of 3D points. To determine the scale factor, the
mean distance between the two corners of the eyes
and the two corners of the mouth is evaluated both in
the generic model and the point cloud and their ratio
is used as the scale factor. After scaling, the generic
model is rotated so that its orientation is roughly the
same with that of the point cloud. Finally, the generic
model is translated so as to minimize the sum of Eu-
clidean distances between the eyes and mouth centers
of the generic model and the point cloud.
Having aligned the generic model and the point
cloud, the next step is to deform all the nodes of
the generic model according to the reconstructed 3D
point cloud. This problem can be formulated as fol-
lows. Given the 3D points G
i
of the generic model
(i = 1, ..., L where L = 1729), the 3D points M
k
of
the point cloud ( k = 1,..,N where N = 15) and the
distances [dx
k
,dy
k
,dz
k
] , k = 1,...,N between the N
3D points of the cloud and their corresponding nodes
of the generic model, our objective is to estimate the
new coordinates G
′
i
of the L− N nodes of the generic
model that do not have a corresponding point in the
point cloud.
We introduce three error functions
f
x
(x) = dx = x− x
′
(4)
f
y
(y) = dy = y− y
′
f
z
(z) = dz = z− z
′
where [x,y,z]
T
are the coordinates of a node of
the generic model and [x
′
,y
′
,z
′
] the coordinates of the
corresponding point of a smooth surface that passes
through the points M
k
of the point cloud. In other
words, these error functions provide the distance D
i
=
[dx
i
,dy
i
,dz
i
]
T
along the three axes between a point
G
i
of the generic model and its corresponding point
in the target surface. Since these error functions can
be evaluated only for the N model nodes that have a
corresponding point M
k
in the point cloud, the values
D
i
for the rest of the generic model nodes should be
estimated through extrapolation and interpolation of
those N known values.
For this purpose we used thin plate smoothing
spline functions, which interpolate a curve over a
fixed set of nodes in a way that minimizes the bending
energy of the curve (Bookstein(1989)). The interpo-
lation of the aforementioned error functions results to
a vector field defined in the 3-dimensional space that
expresses the difference between the generic model
and a smooth surface passing through the 15 points
of the point cloud. Using these error functions, the
distances D
i
= [dx
i
,dy
i
,dz
i
]
T
, i = 1,...,L, for all the
nodes of the generic model can be evaluated. Thus
the new coordinates G
′
i
of each node of the deformed
3D face model are derived through G
′
i
= G
i
+ D
i
.
Initially, the functions f
x
(x) and f
y
(y) are inter-
polated, estimating the displacements of the generic
model’s nodes along the x and y axis respectively.
Interpolation of function f
z
(z), which estimates the
depth of the face, is done separately and requires dif-
ferent handling. This can be explained intuitively by
3D HUMAN FACE MODELLING FROM UNCALIBRATED IMAGES USING SPLINE BASED DEFORMATION
457

realizing that if one’s eyes are wide apart, the mouth,
nose and the whole face are likely to be wider as well.
For the depth of a face however this is not true since
the fact that somebody has a long nose has no effect
in the overall distribution of the face nodes along the
z axis. Additionally, the depth of the various parts of
the face, i.e. face, nose, eyes, may vary dramatically
which prescribes that they should be dealt separately.
For all those reasons, the various parts of the face are
interpolated seperately along the z axis, and the final
model emerges by combining those partial 3D patches
into the final deformed 3D face model.
Up to this point, all the error functions have been
interpolated and the deformed generic model can be
obtained. The final stage of the deformation step aims
to improve the model’s visual appeal by adding tex-
ture to the model. This is done by re-projecting the
deformed 3D face model on a 2D image and generat-
ing texture for each triangle of the face mesh. Since
no correspondingcolor is available for some triangles,
due to occlusion, the blank areas are filled by means
of color interpolation from their neighbor areas.
4 EXPERIMENTAL RESULTS
For our experiments we used a variety of sets of high
resolution (2048× 1536) facial images, acquired with
an off-the-shelf uncalibrated camera, and user sup-
plied features and correspondences. We used 3 im-
ages per set, which is the minimum number of im-
ages for a proper reconstruction, and obtained several
face models which were later used to evaluate our al-
gorithm. Experiments conducted with sets containing
more than 3 images lead to similar results.
The deformed textured model, derived from the 3
facial images depicted in Figure 1, is presented in Fig-
ure 2. It can be seen that the model encodes efficiently
well the basic facial characteristics of the subject. De-
spite the fact that the camera positions used to acquire
the facial images are quite close to each other,the pro-
posed method estimates adequately well the depth of
the face and the produced 3D face model resembles
the subject considerably well.
Table 1: Mean, min and max normalized approximation er-
ror of 8 models.
Mean Error Min Error Max Error
0.006 0.000 0.044
Due to the lack of real 3D face data (i.e. laser
scans), we used the face models produced by our al-
gorithm as ground truth to assess the effectiveness of
Figure 2: Different views of the final reconstructed 3D
model for the image set depicted in Figure 1.
our method. More specifically, synthetic images, each
corresponding to a different view of a certain 3D face
model, were obtained and used as input image sets for
our algorithm. The produced 3D face model was sub-
sequently compared with the corresponding original
3D model. The objective criteria to measure the sim-
ilarity between the two face models was the 3D Eu-
clidian distances between the 116 nodes of the orig-
inal face model and their corresponding nodes in the
produced face model. These nodes represent the basic
nodes of the Candide model along with the nodes we
added to enhance the resolution of the model in the
nose area. Results are presented in Table 1 where the
mean, minimum and maximum approximation errors
averaged over 8 such reconstructions is depicted. The
approximation error is calculated for all the 116 nodes
of the 3D face. It should be noted that the approxima-
tion errors in this table have been normalized with the
height of the produced 3D face and thus an error value
of 0.01 corresponds to a approximation error equal to
1/100-th of the head height.
It is obvious that despite the fact that the generic
model was deformed using information only from 15
3D points, the use of thin-plate smoothing splines pro-
duced efficient estimates of the location of the rest
of the nodes and the reconstructed 3D model is very
close to the original. As expected, the mean error
for all the nodes of the model is considerably small
(0.06). The experimental procedurerevealedthat only
5 out of the 116 nodes tend to produce errors larger
than 0.01. These 5 nodes correspond to nodes in the
forehead area where the mean error is larger than the
rest of the face due to the lack of 3D reconstructed
points in the area.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
458

An alternative way to evaluate the effectiveness
of our method is the re-projection error for all the
images in an image set. Experiments affirmed that
the re-projection error is significant small since it
does not exceed 4 pixels for images of dimensions
2048× 1536.
Through experimentation we have reached the
conclusion that the quality of the results is mainly af-
fected by the selection of the first two views. These
views should correspond to views taken from angles
that are as far apart as possible to capture adequately
the depth of the face. Furthermore, the accuracy of the
feature selection procedure largely affects the accu-
racy of the reconstruction, since the reconstruction al-
gorithm is based on the determination of the epipoles
and hence is very sensitive to measurement noise.
5 CONCLUSIONS
In this paper, we have presented a two-step technique
to deal with the challenging task of face reconstruc-
tion in three dimensions from a set of uncalibrated
images. In the first step of the proposed approach,
15 salient features are manually identified in all the
images of the set and their 3D coordinates are re-
trieved using an uncalibrated 3D reconstruction algo-
rithm. In the second step, a generic face model is de-
formed according to the 3D points produced in the
first step. Since the 3D coordinates of only 15 points
are known, the 3D coordinates for the rest nodes of
the generic model are retrieved through interpolation
and extrapolation, with extra provisions to ensure a
proper face reconstruction. The experimental results
prove that the combination of a robust SfM algorithm
with a generic mesh model deformed using thin plate
smoothing splines can yield very satisfactory 3D re-
constructions.
ACKNOWLEDGEMENTS
This work was supported by the ”SIMILAR” Eu-
ropean Network of Excelence on Multimodal Inter-
faces of the IST Programme of the European Union
(www.similar.cc)
.
REFERENCES
P. R. S. Mendonca and R. Cipolla. A simple technique for
self-calibration. In Proc. of the IEEE Conf. on Com-
puter Vision and Pattern Recognition (CVPR), vol-
ume 1, pages 500–505, 1999.
R. I. Hartley. Euclidean reconstruction from uncalibrated
views. In Proc. of the 2nd Joint European - US Work-
shop on Applications of Invariance in Computer Vi-
sion, pages 237–256. Springer-Verlag, 1994.
M. Pollefeys and L. Van Gool. A stratified approach to
metric self-calibration. In Proc. of the IEEE Conf.
on Computer Vision and Pattern Recongition (CVPR),
pages 407–418, 1997.
S. Basu A. Pentland J. Strom, T. Jebara. Real time tracking
and modeling of faces: An ekf-based analysis by syn-
thesis approach. Technical Report 506, MIT Media
Laboratory, 1999.
Z. Zhang Y. Shan, Z. Liu. Model-based bundle adjustment
with application to face modeling. In Proc. of IEEE
Internation Conference on Computer Vision (ICCV),
volume 2, pages 644–651, Vancouver, BC, Canada,
2001.
P. Fua. Regularized bundle-adjustment to model heads from
image sequences without calibration data. Interna-
tional Journal of Computer Vision, 38(2):153–171,
2000.
S. Krishnamurthy T. Vo A.R. Chowdhury, R. Chellappa. 3d
face reconstruction from video using a generic model.
In Proc. of IEEE International Conference on Multi-
media and Expo (ICME), volume 1, pages 449– 452,
2002.
V. Atalay R. Hassanpour. Delaunay triangulation based
3d human face modeling from uncalibrated images.
In Proc. of Computer Vision and Pattern Recognition
Workshop (CVPR), pages 75– 75, June 2004.
V. Blanz and T. Vetter. A morphable model for the syn-
thesis of 3d faces. In Proc. of the International Con-
ference on Computer Graphics and Interactive Tech-
niques (SIGGRAPH), pages 187–194, New York, NY,
USA, 1999.
P. Fua M. Dimitrijevic, S. Ilic. Accurate face models from
uncalibrated and ill-lit video sequences. In Proc of
IEEE Conference on Computer Vision and Pattern
Recognition (CVPR), volume 2, pages 1034–1041,
2004.
T. Sim M. Zhao, T. Seng Chua. Morphable face recon-
struction with multiple images. In Proc. of the Inter-
national Conference on Automatic Face and Gesture
Recognition (AFGR), pages 597–602. IEEE Computer
Society, 2006.
R. Koch M. Pollefeys and L. Van Gool. Self-calibration and
metric reconstruction in spite of varying and unknown
internal camera parameters. In Proc. of the Interna-
tional Conference on Computer Vision (ICCV), pages
90–95, 1998.
J. Ahlberg. Candide 3 - an updated parameterized face.
Technical Report LiTH-ISY-R-2326, Dept. of Elegx-
trial Engineering, Linkoping University, Sweden,
2001.
C. Boyd J.L. Mitchell A. Vlachos, J. Peters. Curved pn tri-
angles. In Proc. of the 2001 Symposium on Interactive
3D graphics, pages 159–166. ACM Press, 2001.
F. L. Bookstein. Principal warps: Thin-plate splines and
the decomposition of deformations. IEEE trans. Pat-
tern Analysis and Machine Intelligence (PAMI), 11
(6):567–585, 1989.
3D HUMAN FACE MODELLING FROM UNCALIBRATED IMAGES USING SPLINE BASED DEFORMATION
459
