
AN EFFICIENT SENSOR FOR TRAFFIC MONITORING AND
TRACKING APPLICATIONS
Based on Fast Motion Detection at the Areas of Interest
Nikolaos Zournis-Karouzos
Deartment of Electrical and Computer Eng.,Aristotle Univ. of Thessaloniki,Thessaloniki, Greece
Alexandra Koutsia, Kosmas Dimitropoulos, Nikos Grammalidis
Informatics and Telematics Institute, CERTH, 1
st
km Thermi-Panorama Rd, Thessaloniki, Greece
Keywords: Motion detection, traffic monitoring, target tracking, background extraction and update, A-SMGCS.
Abstract: We propose a novel video sensor for real-time motion detection at specific user-defined regions of interest,
designed primarily for traffic monitoring, surveillance and tracking applications. Specifically, the new
sensor a) supports virtual detectors with a generalized (polygonal) shape, thus providing additional
flexibility in the design of detector configurations, b) is based on fast implementations of recent state-of-the
art background extraction and update techniques and c) constitutes a generic, inexpensive software solution,
which can be used with any video camera. First experimental results confirm that the new video sensor
meets the expectations in terms of real-time performance and demonstrates the additional functionalities,
according to which it was designed. The final goal is to use this new sensor as an alternative, improved
version of embedded motion detection video sensors (like Autoscope®).
1 INTRODUCTION
Within the last years, there is increased market
demand for the development of efficient automated
systems that use computer vision techniques for real-
time traffic monitoring, surveillance and accident
control. These systems have also been used to
augment existing Advanced Surface Monitoring,
Guidance and Control Systems (A-SMGCS), (ICAO
document, 1986) at airports (Besada et al, 2005),
(Pavlidou et al, 2005).
An example of such a system is Autoscope®
Solo Wide Area Video Vehicle Detection System.
However, such systems are usually very expensive,
since they use specialized cameras with additional
integrated (onboard or not) hardware/sofware for
real-time motion detection. Furthermore, they are
not very efficient if used as sensors for tracking or
security surveillance applications. In the FP5 IST
INTERVUSE and FP6 EMMA projects (Pavlidou et
al, 2005), Autoscope sensors were successfully used
to provide an alternative A-SMGCS solution for
small-medium airports without any A-SMGCS
means or to augment an existing A-SMGCS system
(typically based on a surface radar) by covering
specific “blind spots” (usually occurring near
buildings or other obstacles).
However, specific shortcomings were
identified: a) constraints due to the rectangular
nature of virtual detectors, b) use of older, traditional
image processing algorithms and c) the high cost of
video sensors. This paper proposes a novel system
for real-time motion detection at specific regions of
interest within the camera’s field of view, which
aims to avoid the above shortcomings. Specifically,
it a) is using virtual detectors of a generalized
polygonal shape, b) is based on fast implementations
of recent state-of-the art background extraction and
update techniques and c) is inexpensive, being
implemented entirely in software. First experimental
results confirm that the new video sensor meets the
expectations in terms of real-time performance. The
final future goal is to use this new sensor as an
alternative, improved version of the Autoscope
video sensors for the targeted applications.
The rest of this paper is organized as follows:
In Section 2, a brief introduction is made to the
666
Zournis-Karouzos N., Koutsia A., Dimitropoulos K. and Grammalidis N. (2008).
AN EFFICIENT SENSOR FOR TRAFFIC MONITORING AND TRACKING APPLICATIONS - Based on Fast Motion Detection at the Areas of Interest.
In Proceedings of the Third International Conference on Computer Vision Theory and Applications, pages 666-669
DOI: 10.5220/0001084006660669
Copyright
c
SciTePress

Autoscope Vehicle Detection and its use withing the
INTERVUSE project. Section 3 presents the four
background extraction and update techniques
extended in this paper to provide fast and reliable
motion detection for the generalized-shape
(polygonal) virtual detectors. Finally, Section 4
contains experimental results and conclusions
demonstrating the computational gains achieved by
the proposed technique.
2 THE AUTOSCOPE VEHICLE
DETECTION SYSTEM
The Autoscope® Solo Wide Area Video Vehicle
Detection System is an advanced, sophisticated,
traffic surveillance system that uses machine vision
technology to produce highly accurate traffic
measurements (Image Sensing System, 2007),
(Michalopoulos et al, 1993). It is used for traffic
control centres and Internet information systems as
well as incident detection to improve emergency
response times of local authorities.
The Autoscope camera has a built-in Machine
Vision Processor (MVP) which provides many
benefits such as: a) there is no need for high
bandwidth video transmission between the camera
and the MVP, b) enables closed loop control of the
camera optics such as illumination, gain, brightness
and electronic zoom by the vision processor itself, c)
makes the system more easily portable.
Autoscope cameras are addressable by a unique
IP address and can be linked to each other, as well as
to a PC for configuration and statistics collection,
using RS-485 communication.
Each camera can detect traffic in multiple
locations within its field of view. Rectangular areas,
called virtual detectors (VDs), can be defined by the
user on the camera image plane, each corresponding
to a binary output. More complex virtual detectors
can also be defined by combining detector outputs
by means of logical and mathematical expressions
(AND, OR, NOT, time based consideration,
averages, sums, etc). The main advantage of the use
of virtual detectors is that processing involves only
the pixels of the specified areas of the image, thus
reducing the computational requirements.
Once the location of virtual detectors has been
specified, the background in the absence of vehicle
is estimated. Virtual detectors detect the presence of
vehicles by estimating the statistics of the
background from which a threshold is determined.
Then the instantaneous image pixel values are
compared with this threshold and if they are greater
it means that a vehicle is present (Michalopoulos,
1991). Over time, the inbuilt pattern recognition
software learns pattern of contrast, thus very well
coping with night, fog, snow and rain, as experience
with road traffic has shown.
Within the INTERVUSE project (Pavlidou et
al, 2005) this detection system was used for
monitoring of airport ground traffic. More
specifically, information from all available virtual
detectors configured in the video sensor network is
continuously provided to Video Sensor Data Fusion
(VSDF) server through a polling procedure. The
VSDF server then processes these data in order to
extract observations (measurements or plots).
Observations contain information about the
estimated position and size of targets and the date
and time of detections. These observations are sent
to the tracker of the system for further processing.
Ground coordinates corresponding to each fused
observation are obtained using a calibration
procedure, which is performed as a pre-processing
step. It is assumed that the 3-D structure captured by
each camera can be modelled as a plane, which is
approximately true for most airport (and even road)
applications.
3 BACKGROUND EXTRACTION
TECHNIQUES AND POLYGONS
For the reliable detection of moving targets in the
field of view of each camera, the estimation of the
background and its periodic update are required.
This is a very demanding problem especially for
outdoor environments, where external factors such
as camera oscillations, weather, gradual or sudden
illumination changes and/or movements of objects
belonging to the background affect the detection of
moving targets. Such problems are usually addressed
either by techniques aiming to update automatically
the background (Gupte et al, 2002) (e.g. by taking a
weighted average of the current background and the
current frame of the video sequence) or by complex
techniques (Borg et al, 2005), which apply statistical
models for the estimation of each pixel value (e.g.
mixture of Gaussians (Stauffer and Grimson, 1999),
colour and edge fusion method (Jabri et al, 2000)
etc).
In this paper, four state-of-the-art background
modelling, subtraction and update techniques were
extended so that they are applied only within
specific regions of interest, defined by a set of
AN EFFICIENT SENSOR FOR TRAFFIC MONITORING AND TRACKING APPLICATIONS - Based on Fast Motion
Detection at the Areas of Interest
667
polygon-shaped detectors. The four methods are the
Bayes technique (Li et al, 2003), the mixture of
Gaussians (KaewTraKulPong and Bowden, 2001),
the reliable background subtraction and update
(Lluis et al, 2005) and finally, the non-parametric
model for background subtraction (Elgammal et al,
2000). These extensions are seen to result to a very
significant reduction of the complexity and
execution times, as demonstrated in the experimental
results section. Therefore, even techniques with
increased computational complexity, like the Bayes-
based or the Non-parametric Model approaches can
be considered suitable for integration in real-time
systems using the proposed technique. A sample
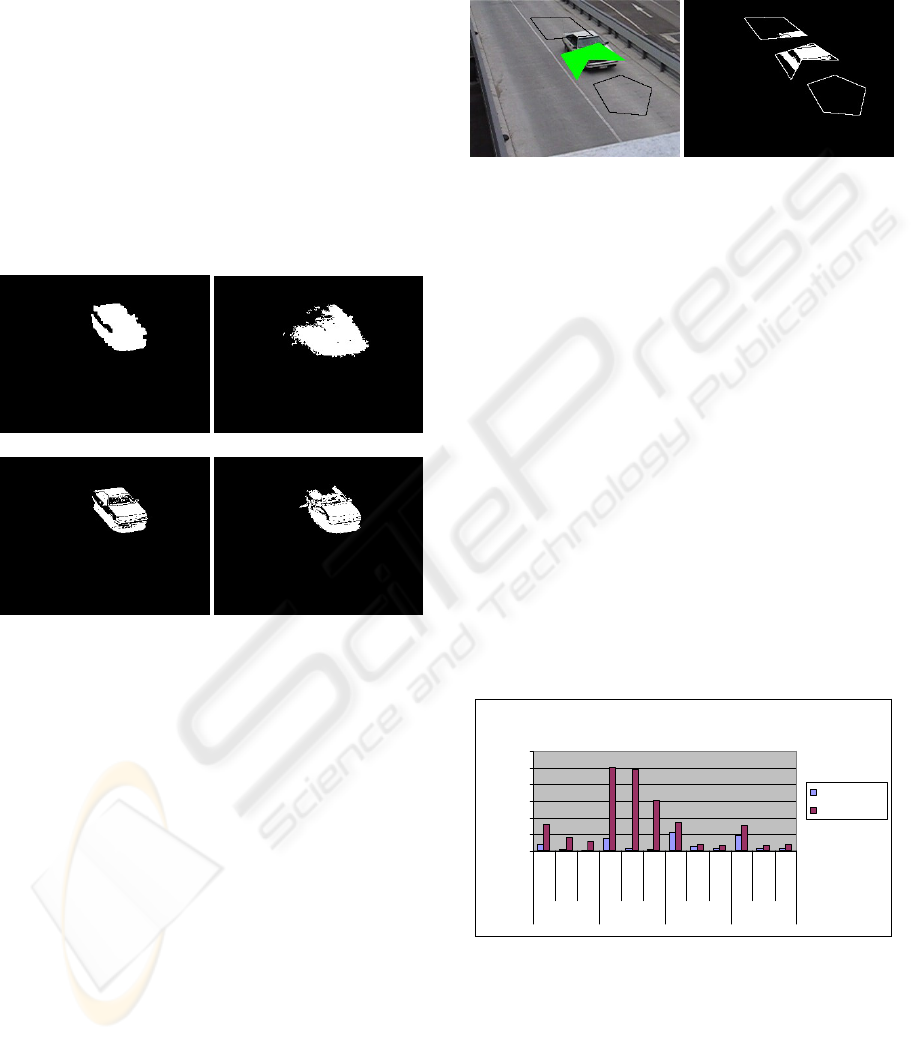
foreground mask for each of the four methods is
shown in Figure 1.
Bayes Gauss
Lluis Non-parametric
Figure 1: Foreground masks for the four methods.
Autoscope’s concept of limiting the application
of background extraction techniques to rectangular
areas is an effective way of reducing execution time.
However, it also limits the ability of the user to
design more efficient detector configurations. To
solve this problem, general polygon-shaped VDs
were supported in the proposed approach.
Furthermore, an additional “Sensitivity Indicator”
property was added to each VD, in order to make the
motion detection system even more flexible.
An off-line tool called “PolyMapper” was
implemented to allow the user to define polygons of
any shape and size depending on the scene structure
and their specific needs and to adjust a threshold
(sensitivity indicator) for each polygon, giving the
percentage of pixels that have to be part of the
foreground for the sensor to be considered as active.
PolyMapper was built using the Qt library and can
run both under Windows and Linux.
A sample frame and mask with the polygonal
sensors marked is shown in Figure 2. When the
percentage of foreground pixels is over a threshold,
the sensor is highlighted.
Figure 2: Sample frame and mask with polygonal sensors.
4 RESULTS AND CONCLUSIONS
For the purposes of this paper, the use of the new
sensor was tested on traffic sequences with three
different resolutions (320x740px, 640x480px,
768x576px). To have a more quantitative view of
the time gain achieved with the polygon sensors, the
four methods were applied on 50 frames of all three
sequences and the frame rates achieved can be seen
in
Figure 3 for both the entire picture and the
polygonal areas. These results do not include the
time of the frame capturing process. For these tests,
the methods were implemented using C++ and the
OpenCV library. The system used was an Intel
Pentium 4 3.2GHz with 1GB of RAM running on
Windows XP Pro.
Finally,
Figure 4 illustrates the percentage of
decrease in execution times accomplished for the
specific sequences.
frame rates
0
20
40
60
80
100
120
320x240
640x480
768x576
320x240
640x480
768x576
320x240
640x480
768x576
320x240
640x480
768x576
bayes gauss lluis np
frames per sec
entire picture
polygons
Figure 3: Test results, chart of frame rates.
The use of polygonal sensors to monitor traffic is
proved to be notably effective. The execution times
of modern but time consuming algorithms were
decreased, allowing for use in real time applications.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
668

Decrease in execution time
0
10
20
30
40
50
60
70
80
90
100
320x240
640x480
768x576
320x240
640x480
768x576
320x240
640x480
768x576
320x240
640x480
768x576
bayes gauss lluis np
%decrease in execution time
Figure 4: Test results, chart of decrease in execution times.
Moreover, the polygonal shape gives flexibility to
monitor areas that could not be covered with
orthogonal sensors and the sensitivity indicator
provides a way to parameterize each sensor
separately, according to the user needs.
The performance of the four background
extraction methods was also evaluated. The Bayes
method, although it benefits from the proposed
technique, does not provide satisfactory results in
cases of slowly moving targets and it still remains
quite slow. The Gauss method is faster but is not
suitable for outdoor scenes, since it has problems
coping with shadows. Results from the Lluis method
deteriorate as the sequence resolution is increased.
Finally, the non-parametric model method which
provides the best foreground masks, benefits a lot
from this technique, thus, it can be considered for
real time applications.
In general, the obtained results are very
promising and show great potential for the new
sensor to be integrated as an alternative that can
replace the Autoscope sensor for target tracking
applications, similar to those developed by
INTERVUSE project. Hardware implementations of
the new algorithms may further reduce the
computational costs and allow for the production of
embedded systems such as Autoscope.
ACKNOWLEDGEMENTS
This work was supported by the General Secretariat
of Research and Technology Hellas under the
InfoSoc “TRAVIS: Traffic VISual monitoring”
project and the EC under the FP6 IST Network of
Excellence: “3DTV-Integrated Three-Dimensional
Television - Capture, Transmission, and Display”
(contract FP6-511568).
REFERENCES
ICAO Document, 1986. 9476-AN/927: Manual of Surface
Movement, Guidance, and Control Systems
Besada,J.A., Garcia,J., Portillo,J, Molina, J.M.,Varona, A.,
Gonzalez, G., 2005. Airport surface surveillance based
on video images, IEEE Transactions on Aerospace
and Electronic Systems, 41 (3), 1075 – 1082.
Pavlidou, N., Grammalidis, N., Dimitropoulos, K.,
Simitopoulos, D., Strintzis, M.G., Gilbert, A., Piazza,
E. Herrlich, C.and Heidger, R., 2005. Using intelligent
digital cameras to monitor aerodrome surface traffic,
IEEE Intelligent Systems Magazine, Vol. 20, No. 3,
pp. 76-81.
Image Sensing System, http://www.imagesensing.com
Michalopoulos, P. G., Jacobson, R. D. Anderson, C. A.
and DeBrucker, T. B., 1993. Automatic Incident
Detection Through Video Image Processing, Traffic
Engineering and Control. Vol. 34, No. 2, pp. 66-75.
Michalopoulos, P. G., 1991. Vehicle Detection Video
Through Image Processing: The Autoscope System,
IEEE Trans. on Vehicular Technology, Vol. 40, No. 1.
Gupte, S., Masoud, O., Martin, R.F.K. and
Papanikolopoulos, N.P., 2002. Detection and
Classification of Vehicles. In IEEE Transactions on
Intelligent Transportation Systems. Vol. 3, No. 1.
Borg, M., Thirde, D., Ferryman, J., Fusier, F.,. Valentin,
V, Brémond, F. and Thonnat, M., 2005. Video Event
Recognition for Aircraft Activity Monitoring. In The
8th International IEEE Conference on Intelligent
Transportation Systems, Vienna, Austria.
Stauffer C. and Grimson, W.E.L. 1999. Adaptive
background mixture models for real-time tracking, In
IEEE Computer Society Conference on Computer
Vision and Pattern Recognition, pp. 246-252.
Jabri, S., Duric, Z., Wechsler, H., Rosenfeld, A., 2000.
Detection and location of people in video images using
adaptive fusion of color and edge information. In 15th
International Conference on Pattern Recognition.
Liyuan Li, Weimin Huang, Irene Y.H. Gu and Qi Tian,
2003. Foreground Object Detection from Videos
Containing Complex Background. In International
Multimedia Conference.
Elgammal, A, Harwood, D. and Davis,L, 2000. Non-
parametric Model for Background
Subtraction.Computer Vision – ECCV 2000.
KaewTraKulPong, P., Bowden, R., 2001. An Improved
Adaptive Background Mixture Model for Real-time
Tracking with Shadow Detection. In Proc. 2nd
European Workshop on Advanced Video Based
Surveillance Systems, AVBS01.
Lluis, J. Miralles X. and Bastidas, O., 2005. Reliable Real-
Time Foreground Detection for Video Surveillance
Applications. In VSSN'05.
AN EFFICIENT SENSOR FOR TRAFFIC MONITORING AND TRACKING APPLICATIONS - Based on Fast Motion
Detection at the Areas of Interest
669
